弹道导弹中段反应式机动突防规避策略
2022-03-14樊博璇陈桂明林洪涛
樊博璇, 陈桂明, 林洪涛
(1.火箭军工程大学, 陕西 西安 710025; 2. 31004部队, 北京 100091)
0 引言
弹道导弹面临的威胁主要在其飞行中段。美国、俄罗斯、以色列等国已成功实施中段飞行反导拦截试验,相关技术仍在不断改进完善,未来将对弹道导弹中段飞行安全构成更大威胁。面对不断发展强大的弹道导弹防御系统,要想提高弹道导弹的生存能力,就必须寻求全新的机动突防手段,研究大气层外弹道导弹机动变轨突防策略是确保弹道导弹生存以及增强突防能力的有效途径。
机动突防已由最初的程序式机动突防方式发展出短时大幅对抗规避式机动突防等新型突防方式。程序式机动突防的鲁棒性较差,针对性强但适用性不广,对发动机和控制系统性能要求较高。而短时大幅对抗规避式机动突防则是根据交战状态灵活机动,大大提高了弹道导弹突防的适用性和成功率。
对于以拦截脱靶量作为评价指标的追踪逃逸问题,有一些研究成果,但短时大幅对抗规避式机动突防问题有其特殊性,主要表现在关注机动能力的同时,还要根据探测的拦截弹飞行状态,决定使弹道导弹成功突防且拦截脱靶量最小的机动规避方向和时机。Yavin考虑了一个随机的追踪逃逸微分对策,在信息完全和信息不完全的情况下,建立攻防双方的非线性偏微分方程,通过数值求解相应的方程,计算出最优规避策略。孙守明等在双方信息感知完全的设定下建立攻防对抗模型,以双方可用过载有限为约束进行分析,得到在突防弹特征角给定的条件下,在某一相对距离进行规定机动可产生最大脱靶量的结论。但在实际交战环境下,由于探测载荷能力有限,信息无法完全感知,因此,从完全信息设定出发的研究结论无法应用于实际交战中。赵秀娜等将突防弹头的机动方式设定为瞬时单次大脉冲机动,机动时机通过仿真分析设定为相遇前某时刻,机动方向的确定使用了计算量较大的智能搜索算法,因此实用性较差。吴启星等在瞬时冲量假设下研究机动加速度增量大小、机动方向和机动时机3个因素对零控脱靶量以及落点偏移的影响,具备一定的参考价值。但瞬时冲量假设认为弹道导弹机动时只产生瞬时速度增量,忽略了机动的时间长度,导致无法分析攻防双方关键的博弈过程。鲜勇等将微分对策理论应用于机动规避策略研究,并尝试建立博弈策略集,但只考虑正向机动、负向机动以及不机动3种策略,设定过于简化而使实用价值不高。杨涛使用推力固定、总工作时间有限的大推力轨控发动机,以节省机动时长为目标,建立突防弹与拦截弹的非线性微分对策模型,设置突防弹以不同的机动时机和机动加速度进行机动,并对拦截弹的拦截脱靶量进行数值仿真。
在弹道导弹对抗规避 式机动突防问题现有的研究成果中,对机动规避时机与方向的选择仍缺乏全面的理论分析,研究工作多是基于仿真的探索性分析。虽然可以从仿真结果中发现一些规律,但无法得到具备实用性的结论,且设定的对抗参数大多不够全面,未考虑真实对抗场景下的动态特性等因素,使得突防策略的适用条件受到限制。这些研究工作均未对所获得的机动规避方向和时机进行清晰表述,无法转化成适用于真实战场环境、行之有效的技术手段。
本文建立并求解攻防双方相对运动微分方程获得弹道导弹短时大幅机动突防规避的最优策略通过合理的运动学分析和模型简化,得到假设对抗场景下的最优机动规避方向。建立视线角速度多阶段1阶线性微分方程模型,分析得到脱靶量与机动时机的关系,得出最优机动规避时机的数学表达式。仿真校核验证所提出的机动规避策略,并分析参数有效性。
1 运动模型及相关设定
本文研究的是一个典型的追踪—逃逸问题。为得到通用可靠的机动规避策略,将实际问题简化为在无外力作用三维空间中的机动规避问题,建立惯性运动坐标系,使简化后的空间具有各向同性。假设动能拦截器(EKV)机动采用的是无延迟、无噪声的比例导引律,弹道导弹突防时采用单次瞬时大脉冲机动。
1.1 模型初始状态设定
真实的对抗场景在大气层外,所受空气阻力可忽略不计,在弹道导弹与EKV距离较近的情况下,二者所受重力加速度大小和方向可认为近似相同,重力对二者相对位置和相对速度的影响也可忽略。首先给出坐标系的定义:以弹道导弹发现来袭EKV时刻弹道导弹质心位置作为坐标系原点,建立与弹道导弹相对静止的三维坐标系,如图1所示。坐标系加速度与弹道导弹所受重力加速度相同,轴在该时刻EKV质心矢径方向,轴与相对速度在轴法平面内的分量方向一致,轴由右手定则确定。可认为在此坐标系中,弹道导弹与EKV不受外力作用。
以弹道导弹发现来袭的EKV时刻为初始时刻,弹道导弹的位置向量=(0 m,0 m,0 m),速度向量=(0 m/s,0 m/s,0 m/s)。EKV初始时刻位置向量=(,0 m,0 m),表示初始时刻弹道导弹与EKV之间的相对距离,速度向量=(E0,E0,0 m/s),E0、E0分别为初始时刻EKV轴和轴方向的速度。

图1 初始时刻坐标系Fig.1 Initial time coordinate system
1.2 EKV机动设定
世界各国通用的反导基本流程,是当弹道导弹预警卫星发现进攻弹道导弹后,地面反导指控中心立刻根据目标跟踪数据制定拦截方案,并指挥发射拦截弹。拦截弹发射后,由地面反导指控中心导引,由助推火箭推动拦截弹向预定拦截点飞行,当飞行到预定位置后,释放EKV.
在EKV制导过程中,导引头测量视线角速度,并通过控制姿轨控发动机调整飞行方向,瞄准预测拦截点,最后高速撞击并摧毁进攻弹道导弹。但是,EKV感知到的视线角速度并不准确,包含噪声和延时以及各类误差源(航向估计误差、飞行控制系统延迟、随机目标机动、自身机动能力不确定性等),都将对EKV的拦截率产生影响。
为得出性能最佳的弹道导弹机动规避策略,设定EKV的制导系统为无噪声无延迟的理想状态,即导引头、噪声滤波器、制导和飞行控制系统被认为是完美的,EKV总是能够击中目标,脱靶量总是为0 m,该系统被称为零滞后制导系统。
假设EKV服从比例导航制导律:
=,
(1)
式中:为垂直于视线的EKV加速命令;为有效导航比,通常在3~5 rad的范围内;为相对速度;为视线角速度。比例导航的优点是简单稳定,在不存在加速度饱和效应的情况下,如果寻的回路中不存在延迟,脱靶量为0 m


(2)
EKV导引头的探测能力会受到噪声、像素化、采样率等因素的限制。因此,存在一个制导临界范围,在真实对抗场景中,当攻防双方的相对位置在制导临界范围内时(≤),视线角速度测量不确定性的动态增长开始变得不可控,导致EKV的制导失效。因此,一般采取使EKV制导系统在未进入临界范围的指定距离关机策略应对。假设关机距离为>,当>时,认为EKV制导系统为理想状态,EKV能精确感知弹道导弹的视线角速度;当≤时,EKV将不再机动。图2为相对距离变化时零控脱靶量的变化规律。

图2 脱靶量演化的不确定性Fig.2 Uncertainty of miss distance evolution
1.3 弹道导弹机动设定
弹道导弹质量远大于EKV,因此弹道导弹需产生远大于EKV的机动推力,才能有与之同等大小的加速度。假设弹道导弹的机动类型为单次短时大脉冲机动,忽略轨控发动机燃料消耗所带来的质量变化以及发动机推力的不确定性,突防的机动时机设为最优机动规避时刻,在大气层外飞行的任何地方都有可能发生。单次短时大脉冲机动的推力持续时长较短且相对固定,推力大小不可调整,只能做一次方向不变且时间长度确定的连续机动,即
(3)
式中:为机动加速度;为额定规避机动加速度;为机动时长。在弹道导弹的机动时长内,机动加速度大小恒为,且方向一致。
图3给出了一个弹道导弹以10正向加速度、机动时长1 s的短时大脉冲机动加速示例。
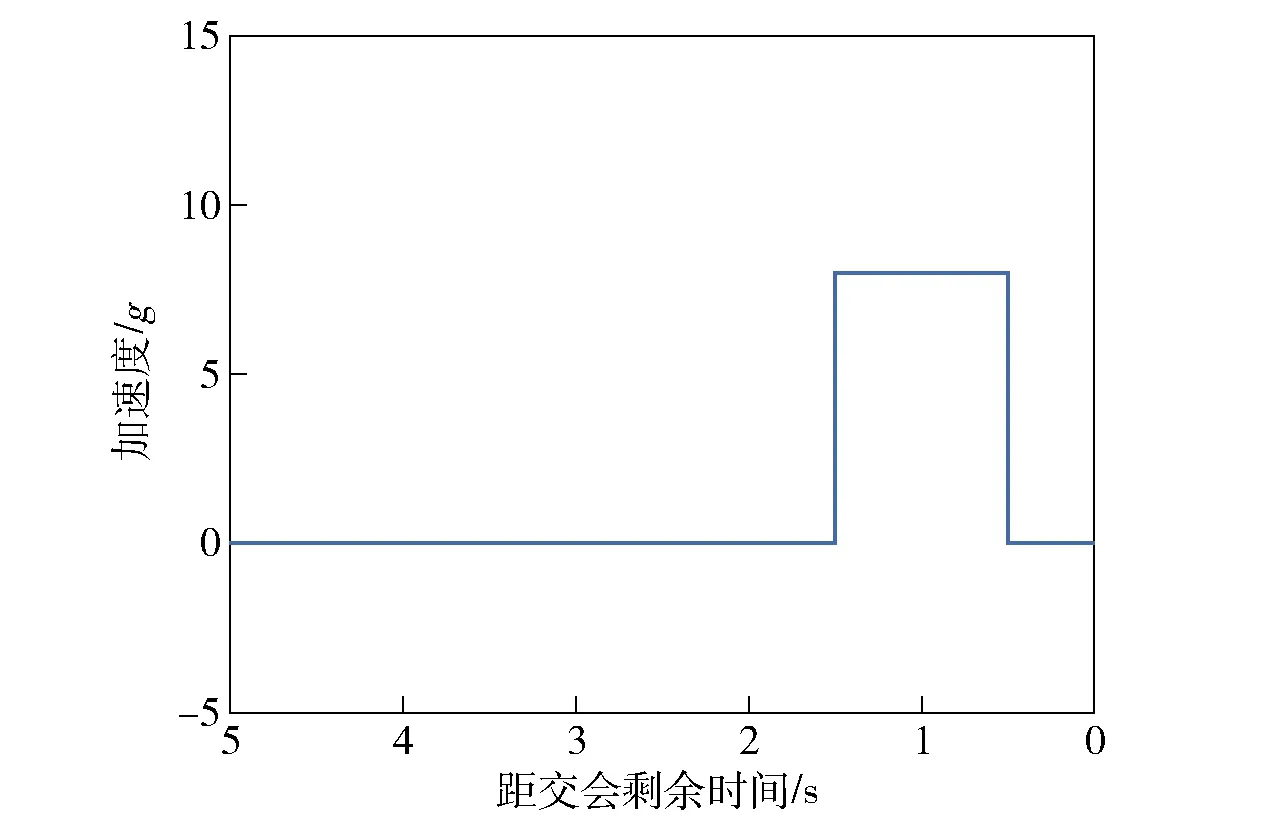
图3 正向瞬时大脉冲机动Fig.3 Forward instantaneous large pulse maneuver
假设弹道导弹开始机动前,通过姿控发动机先对机动方向进行调整,以保证机动方向可任意指定,本文不讨论姿控发动机对方向进行调整时的具体工作流程。为确保EKV无法在导弹机动规避后再次制导拦截,弹道导弹选在与EKV临近相遇时开始机动。此外,假设弹道导弹能及时感知来袭EKV的位置与速度信息,有充分的时间进行姿态调整并向指定方向机动规避。
2 机动规避策略分析
在拦截中,EKV根据其探测到的目标信息,通过机动调整实现对零控脱靶量的平稳控制。因此,进攻弹道导弹的最优机动规避策略是能够使零控脱靶量最大化的策略。
2.1 最优机动规避方向
在弹道导弹机动规避前,弹道导弹与EKV的相对位置都由图1表示,对应的零控脱靶量表示为
=+E0,
(4)
式中:为距交会剩余飞行时间,=E0
弹道导弹的突防时刻选在EKV实施拦截的前几秒,根据EKV的末制导工作机制以及比例导引律特性,在弹道导弹开始机动时,EKV已经过长时间的末制导控制将视线角速度修正到趋近于0 rad/s的状态,可认为机动突防前二者相对位置方向和相对速度方向近似在同一方向上,即此时刻EKV一定能命中目标,E0=0 m/s
弹道导弹的机动规避方向如图4所示,加速度大小恒定为,飞行路径角为,机动时长为,机动突防带来的脱靶量为

(5)
式中:M=cos则(5)式变换为

(6)

图4 弹道导弹加速度飞行路径示意Fig.4 Schematic diagram of missile acceleration flight path
由(6)式可知,当为0 rad或π rad时,是使脱靶量最大的最优机动规避方向。
实际对抗条件下,EKV已经过长时间的制导控制将零控脱靶量控制在很小范围内。因为弹道导弹观测的角速度分辨率不可能明显优于EKV,所以弹道导弹感知到的相对速度与相对位置近似在同一方向上,即感知到的E0、E0为0 m/s,从而弹道导弹无法准确感知零控脱靶偏差方向或视线角速度的方向。导致弹道导弹无法适时判断有效的最优机动方向,且弹道导弹向垂直于视线方向的平面内任意方向采取机动规避的效果差别不大。因此,弹道导弹实际最优机动规避方向为二者相对位置方向法平面内的任意方向。
2.2 机动规避脱靶量公式
为保证弹道导弹成功突防,在确定了最优机动规避方向后,必须同时确定最优规避时机。在坐标系中建立攻防双方的1阶线性微分运动方程,分析不同情境下的最优机动规避时刻,并推导出最终脱靶量
为方便讨论,认为弹道导弹开始机动时,=0 rad/s,记此时刻=,交会时刻=由于弹道导弹机动规避方向在相对速度法平面内各向同性,因此只推导二维平面内最终脱靶量与这些参数间的关系。
假设相对位置方向与相对速度方向近似相同(E0=0 m/s),相对速度不变,弹道导弹机动加速度和EKV机动加速度方向都垂直于相对速度(位置)方向,且相对距离与视线角速度满足(7)式和(8)式:
=(-),
(7)

(8)
根据(4)式和(8)式,视线角速度随时间的变化率为

(9)
将任意时刻的视线角加速度视为弹道导弹机动、EKV机动以及相对距离变化3个因素的线性叠加,即
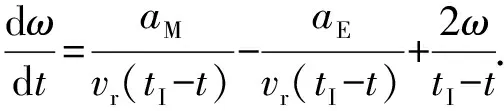
(10)

上述每个阶段微分方程(10)式都可以写成
(11)
的1阶线性微分方程标准形式,其中()、()为的任意函数。因此可以按标准公式写出方程通解,再代入初始条件求出通解中的常数项,即可实现对各阶段微分方程的求解:
1)第1阶段。微分方程为

(12)
代入初值=、=0 rad/s,得到(12)式的解为

(-)(-2),
(13)


(14)
2)第2阶段。微分方程为
(15)

(16)
代入第2阶段结束后(第3阶段)的情境1临界条件=+,得
(17)
代入第2阶段结束后的情境2临界条件=,即=-,得

(18)
3)第3阶段情境1微分方程为
(19)
代入初值=和(17)式,可得(19)式的解为

(20)
当=时,==,代入(20)式得

(21)
EKV的任务是命中进攻弹道导弹,使脱靶量为0 m,而进攻弹道导弹的机动目标则是使最终脱靶量尽可能大。因此,将最终脱靶量作为机动规避性能指标,建立性能指标函数。


(22)
4)第3阶段情境2微分方程为

(23)
代入初值==与(18)式,可得(23)式的解为

(24)
弹道导弹结束机动时=,代入(24)式得
(25)
最终脱靶量为此时刻的零控脱靶量,即==(--),(25)式代入后得到性能指标函数为

(26)
由(22)式与(26)式可以看出,两种情境的最终脱靶量公式相同。
2.3 最优机动规避时刻


(27)
得到最优机动规避时刻为

(28)
根据3个阶段的假设模型,需保证在第1阶段结束时不能出现弹头机动已结束的情况,即>+,或EKV已关机的情况,即>-的情况。所以代入(14)式,要求

(29)
且

(30)
在>1的条件下(29)式恒成立,只需判断(30)式即可。
最优机动规避时机以最优机动规避方向进行机动规避,脱靶量为(28)式代入(26)式,即

(31)

在最优机动规避时刻的公式推导中,导引头测量中的噪声和延迟所带来的影响,显然会使最终脱靶量相比(31)式更大。因此,只要按照(31)式确定机动规避时机,就可以实现弹道导弹的可靠突防。
2.4 不符合最优脱靶量公式情况的分析


(32)
即使此后弹道导弹一直保持=的机动加速度,其最终脱靶量也只有

(33)
这种情况下机动规避脱靶量远小于符合最优脱靶量公式的情况,无法确保成功突防,为避免这种情况,需要选择可靠突防的机动参数取值范围。
3 校核与验证
分别对弹道导弹和EKV交战过程进行二维及三维仿真,以验证最优机动规避策略的正确性、有效性以及模型简化的合理性。
3.1 二维交战仿真
为了校核机动规避策略分析的正确性,按照11节的模型设定,忽略地心引力和空气阻力,建立弹道导弹—EKV对抗平面二维仿真交战模型。仿真模型根据输入的进攻弹道导弹和EKV的初始参数,对弹道导弹和EKV二维相对运动过程进行模拟。
设定弹道导弹开始机动的相对距离=20 000 m,相对速度=10 000 m/s;弹道导弹的初始位置=(0 m,0 m),初始速度=(0 m/s,0 m/s),机动加速度大小设为100 m/s,机动时长为1 s;EKV的初始位置=(25 000 m,0 m),初始速度=(-10 000 m/s,0 m/s);EKV的加速度大小设为100 m/s,有效导航比=5 rad,关机距离=5 000 m-设置为按(28)式计算得出的最优机动时刻1277 4 s
图5为EKV机动时的加速度曲线,在机动开始后约0.33 s时,EKV达到最大加速度,当以最大加速度持续机动0.45 s时,弹道导弹和EKV的相对距离达到关机距离,此时机动结束,加速度为0 g.

图5 二维仿真EKV加速度变化Fig.5 EKV acceleration change in two-dimensional simulation
图6为二维仿真弹道导弹—EKV对抗轨迹。当弹道导弹和EKV的相对距离为时,弹道导弹向垂直于视线的最优规避方向机动,EKV开始对弹道导弹进行机动拦截。EKV关机时弹道导弹尚未结束机动。仿真程序得到的最终脱靶量为26.369 8 m,与(31)式的求解结果相同,证明了最优机动规避时机数学推导的正确性。

图6 二维仿真交战轨迹Fig.6 Engagement trajectory in two-dimensional simulation
设定不同机动时机、机动加速度、机动时长进行仿真,能观察不同的仿真演进过程。分别取弹道导弹机动加速度为80 m/s、100 m/s,机动时长为1.0 s、0.8 s,机动时机在(0,/)范围内间隔0.01 s取值。以不同参数机动规避获得的脱靶量,如图7所示,最大值对应时刻都符合最优机动规避时刻(27)式,最大值都符合(31)式。

图7 不同参数下机动规避的脱靶量Fig.7 Miss distance during maneuver avoidance under different parameters
3.2 三维交战仿真
在校核了公式推导的正确性后,模拟在地心惯性坐标系下的弹道导弹飞行以及拦截突防对抗过程,建立弹道导弹—EKV对抗三维仿真交战程序,以验证第1节机动规避运动模型的正确性。
任意指定弹道导弹发射位置、目标位置以及拦截弹的发射位置(本文参照文献[20]28.4节选取),将进攻弹道导弹和拦截弹简化为脉冲发射,即省略主动段加速过程,认为发射时就具有初速度,同时省略空气阻力,只受重力作用。首先,利用三维兰伯特方程,由导弹发射点摩纳哥蒙特卡洛市(43.75°E,7.42°N)、目标点美国拉斯维加斯市(115.136°W,36.175°N)以及弹道导弹飞行时长(2 000 s),计算弹道导弹发射时的初始速度。然后,使用开普勒方程,由弹道导弹初始状态参数(位置和速度)和设置的拦截点时刻(弹道导弹发射后1 000 s)估计拦截点位置。最后,再次使用兰伯特方程,由预估的拦截点位置、拦截弹发射时刻(弹道导弹发射后200 s)和发射位置美国亚特兰大市(74.423°W,39.364°N)以及飞行时长,计算出EKV的初始速度。
在此基础上,进行弹道导弹- EKV三维交战仿真。预设拦截时刻前200 s(弹道导弹飞行800 s)时EKV制导系统被打开,且采用比例导航制导律,设定=3 rad,关机距离=5 000 km. 图8为EKV拦截时的加速度曲线,EKV制导开始于起飞后大约997.4 s,最大加速度为100 m/s.
图8 三维仿真EKV加速度变化Fig.8 EKV acceleration change in three-dimensional simulation
当弹道导弹飞行时间到达按(28)式求解出的最优机动时刻1.421 05 s时,弹道导弹以=100 m/s、=1 s的加速度沿最优机动方向开始机动。图9为弹道导弹和EKV运动轨迹的平面视图,可以看出,在距离弹道导弹发射场大约4 577 km、1 800 km的高度处,弹道导弹突防成功。通过仿真得到的弹道导弹—EKV交会前的相对速度为7 466.2 m/s,最终脱靶量=43.475 5 m,将相同参数代入(31)式,计算得=43.477 1 m,仿真结果和使用本文模型公式计算的结果相吻合。

图9 三维仿真交战轨迹的平面视图Fig.9 Plane view of engagement trajectory in three-dimensional simulation
三维交战仿真结果表明,在更接近现实的仿真环境下进行交战模拟所得到的最终脱靶量,与利用2.3节最优机动规避策略计算得出的最终脱靶量基本一致,验证了机动规避运动模型的正确性。
4 参数适用性分析
本文模型计算求解中使用的弹道导弹和EKV的设计参数,都是理想状态下的标称值,但在实际交战中存在着多种不确定因素,因而不可避免地存在着参数误差。参数误差会影响弹道导弹机动规避效果,可能导致机动规避策略失效,一般不能忽略。为保证最优规避策略保持预期性能,分析相关参数的适用范围是十分必要的。
首先,分析EKV相关参数的不确定性及对抗场景对最终脱靶量的影响,根据对EKV参数和相对速度的估计,提出实现最优机动规避策略的参数要求。

(26)式两边分别对求导,得

(34)
由(34)式可见,关于变量的导数恒小于0 m·rad,则随单调递减。


(35)
因为根据34节的分析,弹道导弹会在EKV关机前开始机动,即<(-),则

(36)
最后,对(26)式两边分别对求导,可得关于变量的导数:
(37)
关于的导数恒大于0,即随单调递增。
33节推导得出对抗环境中的相对速度与最优机动时刻无关,但随单调递减。

在分析完感知变量的相关参数要求后,依据(31)式,分析弹道导弹如要实现可靠突防,应对设计参数、提出的要求:
(38)

(39)
且留有余量。
5 结论
本文针对弹道导弹机动突防中非常重要的两个要素——机动方向和机动时刻,通过合理地弹道导弹—EKV运动学模型建模与分析,给出了弹道导弹的最优机动突防策略。主要得出以下结论:
1)考虑实际对抗条件下,弹道导弹所能感知的相对位置和相对速度精度较低,所以弹道导弹的最优机动规避方向可选取相对速度(位置)方向法平面内的任意方向。

