考虑滚仰导引头寄生回路的旋转导弹驾驶仪稳定性设计
2022-03-14周建平李威温求遒夏群利姜欢
周建平, 李威, 温求遒, 夏群利, 姜欢
(北京理工大学 宇航学院, 北京 100081)
0 引言
与平台式导引头相比,滚仰导引头是一种半捷联导引头,取消了框架平台上的速率陀螺组件,使用导弹弹体上的惯性陀螺组件来保证框架平台的稳定。滚仰导引头其优点是导引头机械结构比较简单,易于小型化,能有效降低成本,但缺点是没有机械独立的稳定平台系统实现对弹体运动的隔离。
滚仰导引头伺服系统存在的非线性摩擦等干扰力矩,会使弹体的运动耦合进导引头运动中,引起隔离度问题,半捷联稳定回路速率陀螺和框架角传感器动力学的不匹配又会加重弹体扰动耦合的影响,给制导系统带来更多的扰动和不确定因素。
滚仰导引头目前已经在空空导弹和战术导弹上使用。导引头是导弹的核心部件,其性能直接关系到制导控制系统的精度。隔离度是导引头的一个关键指标参数,反映了导引头隔离导弹体干扰的能力。导引头隔离度不仅影响导引头测量的视线角速度,而且在制导系统中引入了附加的寄生回路。在导弹制导系统的内环中存在寄生回路,严重降低制导精度,影响了旋转导弹的稳定性。如果寄生回路失去稳定性,导弹制导回路的动态质量可能会降低,这将严重影响导弹的终端脱靶量。
对于旋转导弹,旋转运动提高了弹体在初始发射阶段的动态稳定性,还能有效消除或减少推力失调、执行机构安装误差等干扰的影响,但同时导弹在俯仰和偏航通道之间的交叉耦合现象会干扰飞行性能。
李克勇等提出并验证了采用三回路自动驾驶仪、速度回路和姿态自动驾驶仪的自旋导弹稳定区域的充分必要条件,分析了不同情况下的稳定条件。
杨永强等研究由马格努斯效应和马格努斯型力矩或陀螺效应构成的旋转效应对旋转导弹锥形运动的作用,并提出了完整的旋转导弹非线性动力学模型。
由于控制指令和舵机响应存在滞后时间,当一个通道中的命令在另一个通道中产生额外的控制扭矩时,控制系统会产生交叉耦合。不管交叉耦合源是什么,结果都会产生圆锥运动。
然而,对滚仰导引头隔离度与旋转导弹动力稳定性之间的影响缺乏相关研究,并且没有考虑滚仰导引头寄生回路与自动驾驶仪设计参数稳定区域的关系。为分析滚仰导引头寄生回路对旋转导弹稳定性的影响,研究基于滚仰导引头寄生回路的旋转导弹俯仰通道和偏航通道交叉耦合动态特性,计算出旋转导弹稳定性与滚仰导引头隔离度的幅值、滚转率和自动驾驶仪的设计等指标之间的定量关系,得到自动驾驶仪设计频率的稳定区域。为满足控制系统在恒定转速下的稳定性要求,发现采用对舵指令设置相位超前角的解耦方法,能有效地减小旋转导弹的导引头隔离度,并保证自动驾驶仪的设计频率低于临界值。
1 数学建模
1.1 滚仰导引头视线角速度提取模型
滚仰导引头稳定回路对探测系统光轴进行稳定,能有效隔离或减小弹体扰动对导引头光轴指向的影响。导弹飞行过程中,气压、振动等不确定因素引起的传感器刻度尺系数不匹配会造成弹体姿态角运动的不完全解耦,进而引出隔离度问题。
在飞行过程中,滚仰导引头转动过程中框架转动连接处的动静摩擦等会引起干扰力矩回路,干扰力矩的产生会使导引头光轴指向产生偏差,降低导引头的控制精度,是引起隔离度问题的又一重要因素。干扰力矩来源主要有库仑摩擦力矩、黏滞阻尼力矩和弹簧力矩。导弹弹体的滚转方向、俯仰方向和偏航方向的扰动都会通过干扰力矩回路和反电动势回路耦合到导引头控制系统中,对框架的运动造成影响,从而影响导引头控制系统的性能。
使用滚仰导引头,可以提高末制导阶段的导弹打击精度。导引头测量采用比例制导律(PNG)。提取高精度视距角速率信息是滚仰导引头的主要功能,但滚仰导引头不能直接得到视线角速度信息。
滚仰导引头的空间俯仰方向角度关系如图1中所示,图中是目标点,为导引头瞬时半视场,目标处于视场内时探测器误差角满足≤,为当前方向的导引头框架角,ϑ为空间当前方向的弹体姿态角,为弹体基准线,为导引头基准线,为目标方位,为惯性空间弹目视线角,两条点划线之间是导引头视场范围。

图1 滚仰导引头的空间角位置关系Fig.1 Spatial angular position of roll-pitch seeker
滚仰导引头惯性空间弹目视线角和弹目视线角速度分别为

(1)
(1)式中,当前方向的探测器误差角由滚仰导引头测量得到。



图2 视线角速度提取模型Fig.2 LOS angular rate extraction model
从图2中可以看出,滚仰导引头隔离度传递函数可以表示为

(2)

1.2 旋转导弹模型
121 坐标系定义与气动分析


图3 旋转导弹坐标定义Fig.3 Coordinates definition and free-body diagram of a spinning missile
122 运动方程
旋转导弹的6自由度动力学方程在非旋转框架中描述为

(3)
式中:为弹道偏角;为动压;为弹体特征面积;为弹体质量;′为升力系数的导数;″为马格努斯力系数的导数;为弹体直径;为弹道倾角;为弹体特征长度;为横向惯性矩系数;′为静态力矩系数的导数;″为马格努斯力矩系数的导数;′为阻尼力矩系数的导数;′为控制力矩系数的导数;为纵向惯性矩系数;为偏航角;为旋转弹体坐标系下俯仰舵偏角;为旋转弹体坐标系下偏航舵偏角。
(3)式可以简化表述为

(4)

123 旋转状态下的舵指令分解
旋转导弹的控制原理如图4所示,其中为非旋转弹体坐标,为弹体坐标系。从图4可以看出,对于旋转导弹,舵在非旋转体坐标下的响应可以通过旋转体坐标下的舵输出正交分解得到。然而,伺服系统的响应会由于舵的动态延迟而经历相位滞后和振幅衰减,这是导致旋转导弹控制交叉耦合现象的主要原因。

图4 旋转导弹控制原理Fig.4 Control principle of spinning missile
舵的动态控制结构如图5所示,根据陀螺测量的滚转角通过指令分解将舵指令c和c从非旋转坐标转换到旋转坐标下。同样,采用响应分解的方法,将伺服执行器在旋转坐标系下的输出转换到非旋转坐标系。

图5 旋转状态下伺服系统的动态控制结构Fig.5 Dynamic control structure of servo system under the spinning condition
从图4和图5中可以看出,控制交叉耦合的条件与弹体的旋转运动紧密相关。因此,为了消除交叉耦合现象的影响,以下将给出详细的推导。
假设滚转角测量值在当前条件下,非旋转体坐标系与旋转体坐标系之间的控制面命令的转换关系可以表示为

(5)

假设实际滚转角在当前条件下,旋转体坐标系与非旋转体坐标系之间控制面响应的转换关系可以表示为

(6)

考虑到舵机可以用具有固有频率1、阻尼比和动态增益的2阶系统来建模,旋转坐标系中舵机输入和输出之间的传递函数可以表示为
(7)
根据(7)式,可得舵机的动态微分方程为
(8)
式中:表示舵机的时间常数;表示非旋转坐标系下舵指令;′表示旋转坐标系下舵指令。

(9)
在(9)式上应用拉普拉斯变换,忽略舵机的动态响应过程,(9)式可简化为

(10)
式中:是舵机的动态增益,是耦合角,并且存在
(11)
图6 考虑导引头寄生回路的制导和控制系统Fig.6 Guidance and control system with consideration for the seeker DRRPL


(12)
124 制导控制系统模型
考虑导引头寄生回路的旋转导弹制导控制系统如图6所示,使用比例导引律。图6中表示隔离度。
从图6可以看出,舵机在非旋转坐标系下的指令信号矢量可以写为

(13)
式中:为静态误差增益;为跟踪回路的反馈增益;为加速度计与弹体重心的距离;为速率陀螺增益;c和c是旋转导弹的比例导引过载指令,可以分别表示为

(14)

(15)
(14)式中的c和c是弹目视线坐标系下的比例导引过载指令,而(15)式中的和是弹道坐标系下的导弹加速度。在攻角和侧滑角较小的情况下,弹目视线坐标系与弹道坐标系基本重合,(14)式和(15)式代入(13)式,可得

(16)
对于鸭式控制的旋转导弹,在上述坐标系中,正舵角产生正攻角和正俯仰加速度,同时正舵角也产生正侧滑角和负偏航加速度。因此,舵机的输入命令可以描述为
(17)
当ϑ、、、较小时,可得ϑ=+和=+,因此(4)式可改写为
(18)
(19)
(18)式代入(17)式,得

(20)
为简化数学表达式,分析旋转导弹的动态稳定性,利用复系数系统的稳定性判据,得到旋转导弹动态稳定性的充分必要条件。
定义复数控制面响应量=+i,(10)式可改写为
+i=(cos-isin)(′c+i′c)
(21)
定义=+i,并将(20)式代入(21)式,可得

(22)
(18)式代入(19)式,可得考虑导引头寄生回路的制导控制系统复系数方程:

(23)
通过定义′=(cos-isin)并将(22)式代入(23)式,可将具有复系数的制导控制系统的2阶微分方程描述为

(24)
式中:(+i)和(+i)是制导控制系统2阶微分方程的复系数。如果忽略了加速度计的安装误差,则采用如(25)式所示定义:

(25)
假设双回路自动驾驶仪的预期设计频率和阻尼分别为和,并采用传统的极点配置设计方法,则自动驾驶仪增益系数可表示为
(26)
式中:表示执行器增益。
1.3 模型稳定性分析
为了便于稳定性分析,(24)式的特征方程为
+(+i)+(+i)=0,
(27)
式中:(+i)和(+i)是制导控制系统Z变换后特征方程的复系数。
假设跟踪回路的反馈增益等于1,即=1此外,对于鸭式控制导弹,执行器增益等于1,即=1因此,从(27)式可得

(28)
根据(28)式,可得考虑导引头寄生回路和基于复系数的比例制导系统旋转导弹必要和充分条件:
(29)
式中:、为稳定性判据。
2 数学仿真和分析
基于建立的数学模型进行数值模拟,以验证旋转导弹在不同条件下的动态稳定性,分析导引头隔离度对旋转导弹动态稳定性的影响。根据(29)式给出的稳定性判断准则,计算导引头隔离度的稳定极限。为更好地指导旋转导弹自动驾驶仪的设计,在合理假设和不同因素的基础上,考虑滚仰导引头寄生回路的影响,得到了自动驾驶仪设计频率的上界,并对旋转导弹的相应动态稳定区进行了识别。
2.1 仿真参数设定

表1 旋转导弹参数Tab.1 Parameters of spinning missile
根据这些参数,自动驾驶仪的预期设计指标分别选择为阻尼=07,驾驶仪频率=12×=2676 rad/s假设=0、=1和=1,可得双回路加速度自动驾驶仪的设计参数=0001 1和=0133 2
2.2 动态稳定条件分析
根据旋转导弹的充分必要的稳定条件,利用23节提出的方法,计算出的稳定界为0到0065因此,对初始攻角为5°和初始侧滑角为0°的圆锥运动进行了稳定、临界稳定和不稳定3种状态的仿真,以验证上述方法获得的动态稳定条件。为0050、0065和0080的结果分别为稳定圆锥运动、临界稳定圆锥运动和不稳定圆锥运动。图7为-相平面,箭头表示旋转收敛方向,图8和图9为双通道加速度响应。
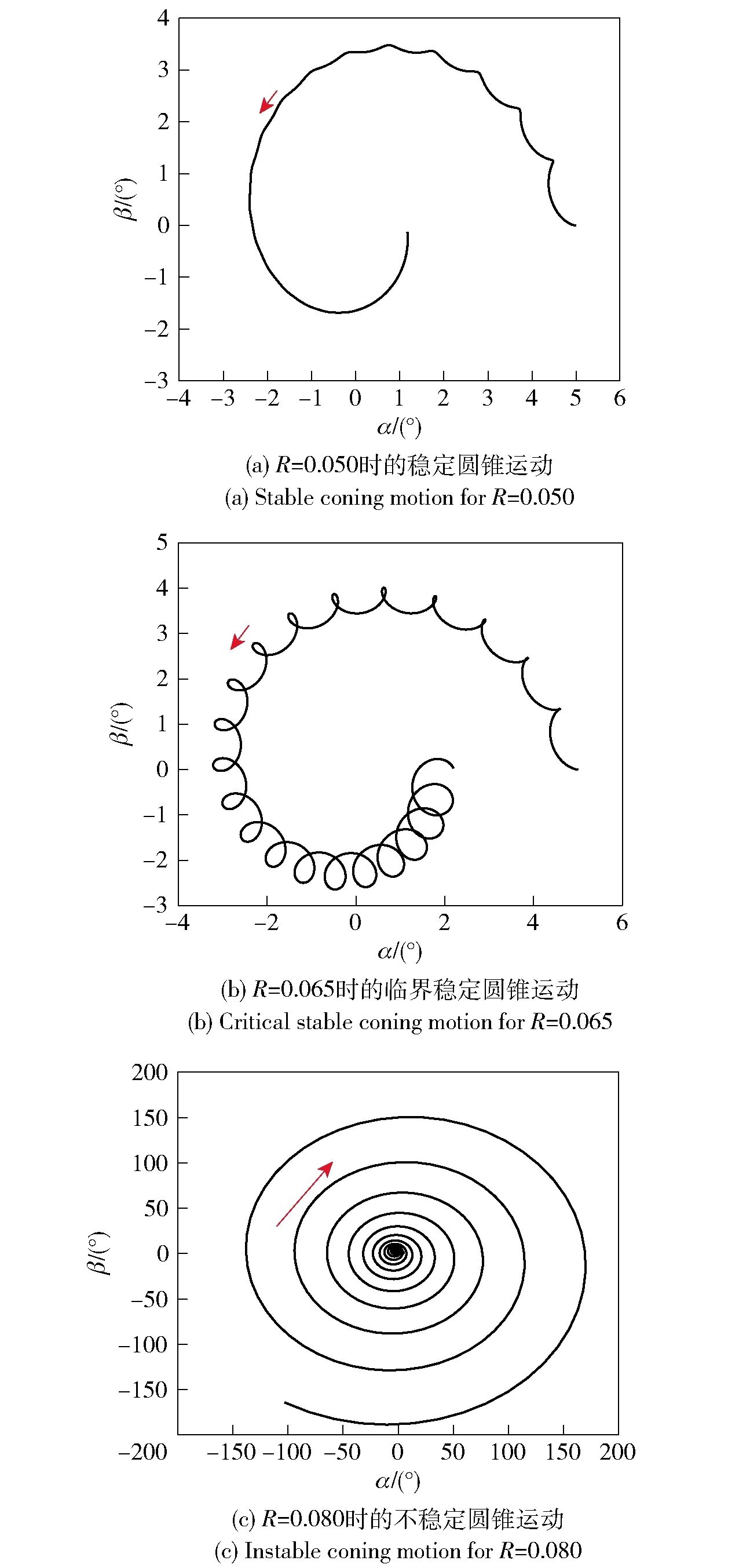
图7 α-β相平面Fig.7 α-β phase plane
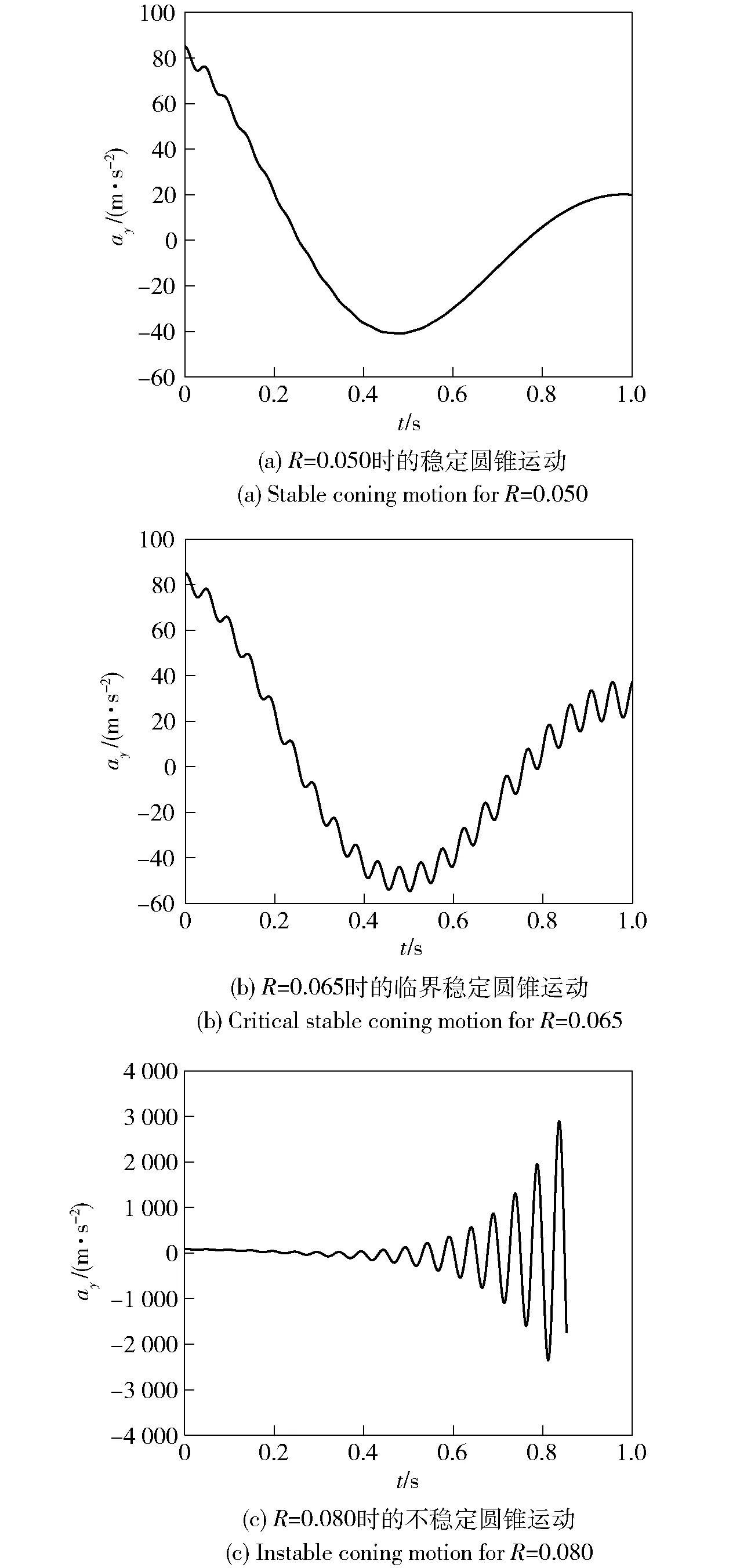
图8 旋转导弹的俯仰通道加速度响应Fig.8 Pitch channel acceleration response of spinning missile

图9 旋转导弹的滚转通道加速度响应Fig.9 Roll channel acceleration response of spinning missile
当=0050时,满足稳定要求,初始扰动衰减,在-相平面的值以箭头方向旋转迅速收敛到0°在这种情况下,制导控制系统具有抗干扰能力和恢复能力。在=0065,即基于所提出方法的临界值时,可从图8和图9中观察到,响应呈等幅周期振荡,旋转导弹处于极限状态。然而,在=0080时,导引头隔离度超出稳定区域,导致发散圆锥运动。
从图7~图9可以看出,尽管自动驾驶仪的设计参数满足稳定极限,但由于导引头影响,旋转导弹的运动状态也会有所不同。因此,满足自动驾驶仪稳定性极限的参数不能保证旋转导弹在隔离度条件下的动态稳定性。仿真结果与分析推导的导弹旋转运动稳定极限吻合较好。
2.3 动态稳定条件研究

为了便于研究,提出以下假设:1)加速度计的反馈增益等于1(即=1);2)加速度计的安装位置等于0(即=0)。基于这些假设,确定不同情况下的稳定区域。
231 旋转速度对动态稳定性的影响
旋转速度是旋转导弹的一个重要参数,然而,弹体的旋转运动导致了俯仰和偏航通道之间的交叉耦合。因此,为了评价弹体旋转运动对弹体动力稳定性的影响,计算了不同旋转速度下弹体的稳定区,并与非旋转导弹的动态稳定性进行了比较。
对于轴对称非旋转导弹,交叉耦合的微小影响可以忽略,同时也可以忽略马格努斯效应和陀螺效应。忽略舵机的瞬态响应,考虑导引头寄生回路的制导控制系统特性方程可以表示为
+{-[+(-)]}- {[+(-)]+[-]}=0,
(30)
式中:为单位攻角产生的导弹速度矢量旋转角速度,=;为单位角速度产生的俯仰旋转角加速度;为单位舵产生的俯仰旋转角加速度;为单位攻角产生的俯仰旋转角加速度,=-根据Routh-Hurwitz稳定性准则,非旋转导弹系统稳定性的充分必要条件可以表示为
(31)
基于(29)式和(31)式中的不等式以及表1中给出的系统参数,不同速度情况下稳定区域的比较结果如图10所示。
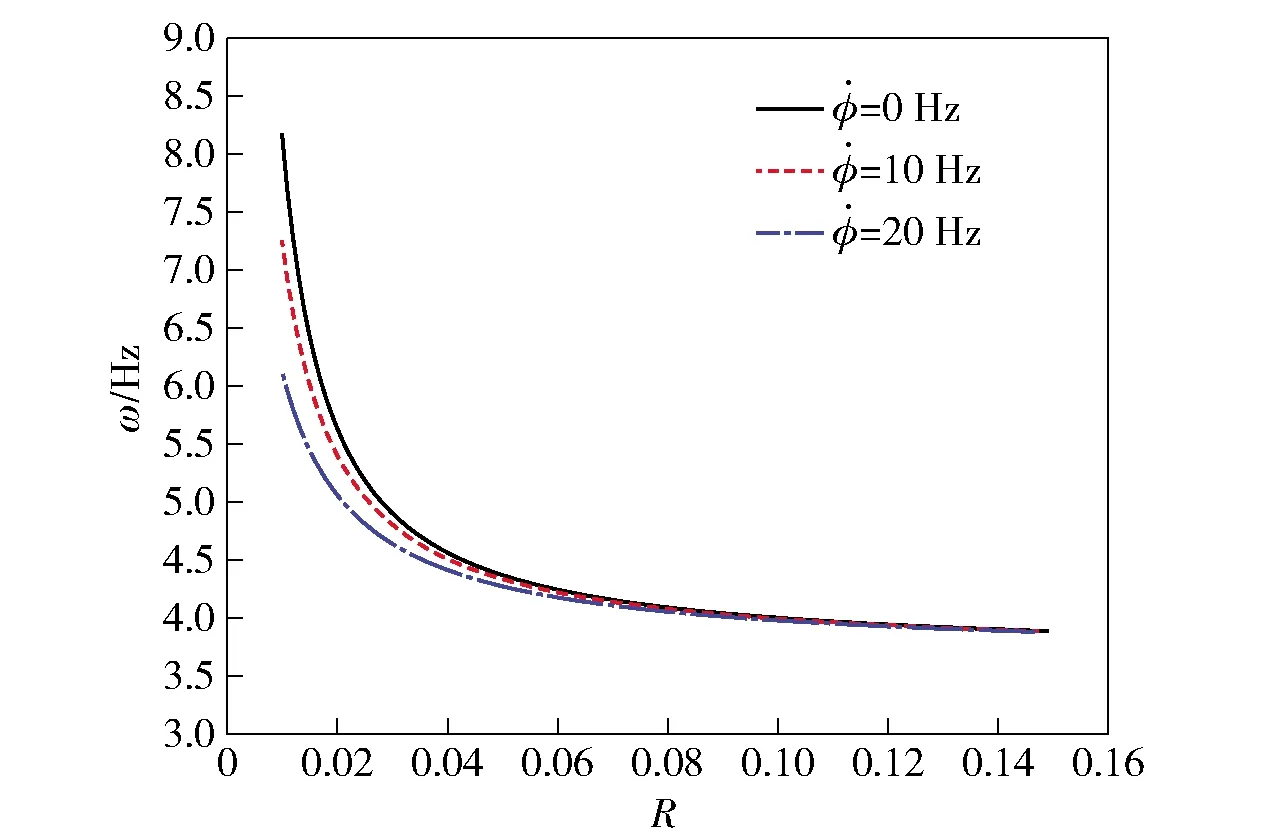
图10 不同旋转速度情况下的稳定区域比较Fig.10 Comparison of stability regions at different spinning rates
从图10中可以看出,随着导引头隔离度振幅的增大,临界自动驾驶仪频率将越来越小,非旋转导弹的稳定区大于旋转导弹的稳定区。由此可以推断,导引头寄生回路对旋转导弹动态稳定性的影响更为严重,因为俯仰和偏航通道之间存在交叉耦合。此外,旋转导弹的动态稳定区随着旋转速率的增加而变小。
232 导引头隔离度的影响
在不同值下获得的自动驾驶仪频率稳定极限如图11和图12所示。图11包含在给定旋转速度下可实现的最大频率,以及旋转导弹的动态稳定区域。图12显示了自动驾驶仪频率与旋转速度之比的变化曲线。

图11 考虑驾驶仪频率的导引头隔离度稳定区域比较Fig.11 Stability region of ω considering DRR
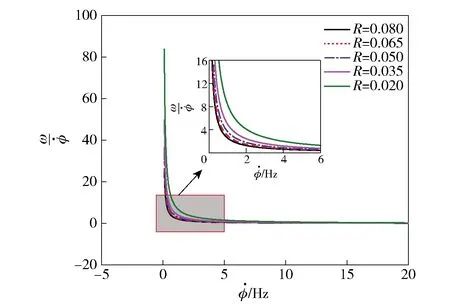
图12 考虑的导引头隔离度的稳定区域比较Fig.12 Stability region of considering DRR

3 结论
为了研究滚仰导引头寄生回路对旋转导弹稳定性的影响,建立考虑滚仰导引头寄生回路和双回路加速度自动驾驶仪的比例导引系统模型,推导了旋转导弹动态稳定的充分必要条件。为分析和验证旋转导弹动态稳定性,进行了不同条件下的数值模拟。得出以下主要结论:
1)对于旋转导弹而言,通过求解动态稳定条件,获得了自动驾驶仪设计频率的稳定区域。自动驾驶仪设计频率的稳定区域与非旋转导弹相比明显缩小。
2)低旋转速度有利于减小滚仰导引头寄生回路对旋转导弹稳定性的影响,根据稳定性边界确定自动驾驶仪设计频率和制导系统的设计参数。
3)研究基于滚仰导引头隔离度寄生回路对旋转导弹稳定性的影响,能优化空空导弹和战术导弹制导控制系统的相关设计,对提升空空导弹和战术导弹制导末制导精度具有重要的工程意义。
