海洋石油作业三自由度机械臂设计
2022-03-12陈卓明
陈卓明
(中海油能源发展股份有限公司采油服务分公司,天津 300457)
海洋石油开采是补充国家石油能源储备、供给社会生产和居民生活所需石油资源的重要途径,在能源开发领域扮演着日益重要的角色。在海洋石油开采平台上,各种类型的机械设备已满足日常的开采作业、运输作业需求。理论上讲,为了完成复杂的作业任务,应该配置多自由度的机械臂以满足灵活操作的需求[1]。但是,因为海洋石油开采平台的有效空间有限,太多的自由度会导致作业空间增大,有可能因操作范围受阻而无法达到预定的需求。为此,三自由度机械臂既满足了灵活性需求,作业空间也不大,对海洋石油开采平台来说非常适用[2-3]。该文以海洋石油平台的开采任务为研发背景,设计了一款三自由度的机械臂。整个设计工作从空间坐标变换的基本理论出发,通过机器人运动学和机械臂末端作业轨迹规划等研究,完成三自由度机械臂的本体设计、运动设计,进而对其作业运动的关键参数进行试验分析,以验证其工作性能。
1 海洋石油作业三自由度机械臂的空间坐标变换
在海洋石油作业过程中,三自由度机械臂的作业空间是一个三维空间,其部件构成和运动轨迹都需要符合三维空间的坐标表达。对三维空间中的任意一个点,可以构建一个矩阵对这个点的空间坐标关系进行刻画,其数学形式如公式(1)所示。
式中:nx为三维坐标空间中x方向上法向量;ny为三维坐标空间中y方向上法向量;nz为三维坐标空间中z方向上法向量;ox为三维坐标空间中x方向上指向向量;oy为三维坐标空间中y方向上指向向量;oz为三维坐标空间中z方向上指向向量;ax为三维坐标空间中x方向上单位向量;ay为三维坐标空间中y方向上单位向量;az为三维坐标空间中z方向上单位向量。
在海洋石油平台上,三自由度机械臂在三维空间上的运动体现为一个点在三维空间上的平移、旋转或者是平移和旋转的组合。对简单的运动,一次平移运动或一次旋转运动就可以实现。但是对复杂运动,就需要多次平移运动和多次旋转运动的组合。在平移运动的过程中,公式(1)所示的矩阵的前3 列是不会发生变化的,只有第4 列发生变化。可见,公式(1)给出的矩阵第4 列的动作对应于平移运动。按照这样的规律,公式(1)中给出的矩阵的前3 列对应旋转运动。如果要完成旋转操作,就需要对前3 列进行变换。
为了便于阐述复杂情况下的三维坐标变换,该文用一个具体的案例来加以分析和解读。如果三维空间中一个点(n,o,a)要参照三维空间中另一个点(x,y,z)连续进行4 次坐标变换。其中,第一次变换是一个旋转变换,即三维空间点(n,o,a)绕三维空间坐标系的z轴旋转θ度;第二次变换是一个平移变换,即三维空间点(n,o,a)绕三维空间坐标系的z轴平移d个单位;第三次变换还是一个平移变换,即三维空间点(n,o,a)绕三维空间坐标系的x轴平移a个单位;第四次变换还是一个旋转变换,即三维空间点(n,o,a)绕三维空间坐标系的x轴旋转α度。
这样,可以根据这4 次坐标变换得到其变换后的新位置,其中的总体变换矩阵如公式(2)所示。
式中:Rot(x,a)为第一次旋转坐标变换;Trans(a,0,0)为第二次平移坐标变换;Trans(0,0,d)为第三次平移坐标变换;Rot(z,θ)为第四次旋转坐标变换。
2 海洋石油作业三自由度机械臂的运动学分析
在三维空间坐标变换理论的基础上,该文设计出三自由度机械臂,专门服务于海洋石油作业的机械装置,其结构和关键参数标注如图1 所示。
图1 中给出了海洋石油平台三自由度机械臂的简易结构。其中,最末端的臂长为150 cm,中间段的臂长为200 cm,垂直方向上的最长臂的长度为300 cm。在垂直方向的最长臂下方还有一个用于稳定安装和便于固定的底座。在底座上,对应于最长臂的轴心,设定了X-Y-Z坐标系,坐标原点位于O点。垂直方向上的最长臂和中间臂形成一个关节,关节处回转中心用O1表示。中间臂和末端臂之间形成一个关节,关节回转中心用O2表示。末端臂上还可以携带操作装置或者执行机构,以便完成抓取、搬运等动作。
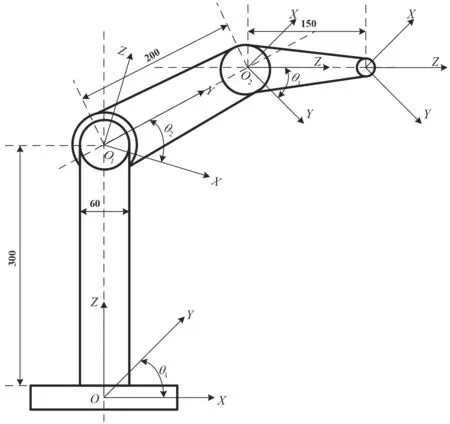
图1 该文设计出的服务于海洋石油平台的三自由度机械臂
根据上述的机械结构图,要进行相关的运动学分析,就首先要建立三段机械臂的各个关节之间的D-H 关系。对有n个自由度的机械臂而言,从第一个关节到最后一个关节之间的D-H 关系可以构建如公式(3)所示的表达。
在该文中,因为是3 个自由度,一共有3 个关节,即底座和垂直方向上臂的关节,底座的高度也对应第一号连杆。第二个节是垂直臂和中间臂,垂直臂是第二号连杆,中间臂是第三号连杆。第三个关节是中间臂和末端臂,末端臂时第四号连杆。这样,将上述构件具体化到公式(3)中可以得到关键的参数配置,见表1。
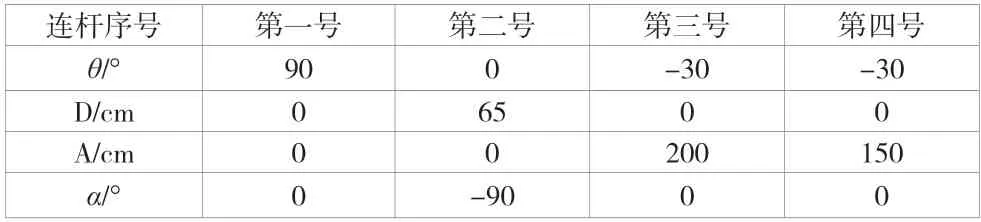
表1 该文设计的三自由度机械臂的参数及配置
表1 中,第一号连杆转角θ为90°,第二号连杆转角θ为0°,第三号连杆转角θ为-30°,第四号连杆转角θ为-30°,只有这四个连杆的动作协调配合才能完成规定的动作。从这个原理上看,表1 中其他几个参数也需要4 个连杆的协调配合,仅依靠其中一个连杆的动作是不可以的。
3 海洋石油作业三自由度机械臂的仿真试验
上述工作中对海洋石油作业的三自由度机械臂进行了结构设计、运动学分析、空间坐标变换规律分析,接下来将进行仿真试验,对其空间作业的轨迹规划进行分析,以判断其关键参数的性能是否符合设计要求。在整个仿真试验中,选择了MATLAB 平台作为运动控制和作业轨迹的编译平台。
作业轨迹的具体提出应该遵循海洋石油开采的具体任务,一方面要确保任务有效完成,另一方面要确保三自由度机械臂的作业安全和平稳运行。实际上,真正能完成作业任务的是三自由度机械臂的末端,但是末端执行机构动作的完成离不开末端臂、中间臂、垂直臂、底座的协调配合,只有这些部件都不和障碍发生碰撞,这样的末端作业才是安全的。根据作业轨迹规划,将末端执行机构在三维空间中动作的每个点都连接起来就可以形成末端执行机构的空间轨迹。同样的道理,将末端臂、中间臂、垂直臂所经过的三维空间上的各个点都进行连接,就可以形成对应的空间轨迹。
在给出一个简单的抓取任务之后,让该文设计的三自由度机械臂在6 秒内完成这个动作,每秒钟3 个关节的转角变化数据见表2。
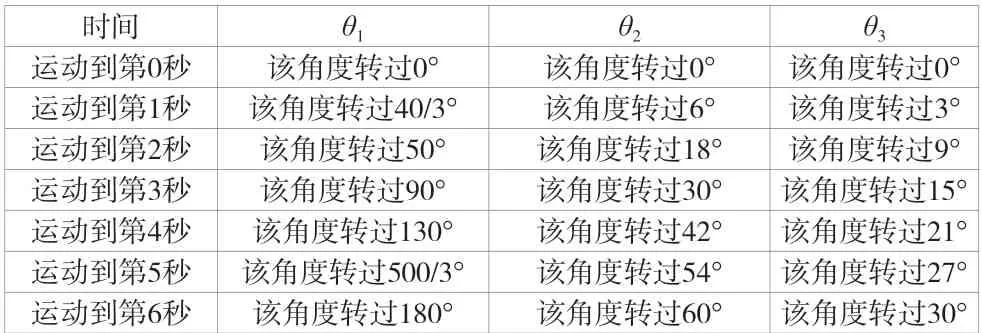
表2 简单抓取动作下各个关节转过的角度
为了进一步验证该文设计的三自由度机械臂设计的是否合理、其作业过程是否达到了要求,该文进一步给出其末端的加速度变化曲线,如图2 所示。

图2 三自由度机械臂末端的加速度变化情况
从图2 中的曲线可以看出,加速度从最开始的+6 °/s2调整到第1 秒时的0 °/s2,在第1 秒到第5 秒之间,三自由度机械臂的末端都维持匀速作业,作业平稳。作业完成后,三自由度机械臂的末端在第6 秒完成了转向,加速度也调整到了-6 °/s2。
进一步观察三自由度机械臂的末端速度变化曲线,如图3 所示。
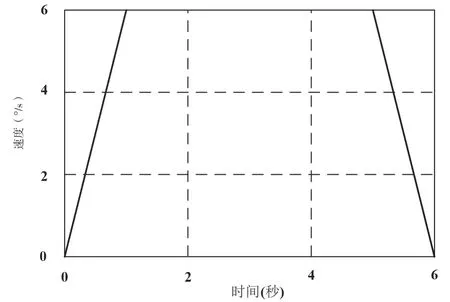
图3 三自由度机械臂末端的速度变化情况
从图3 中的曲线可以看出,三自由度机械臂的末端速度从第0 秒开始增大,在第1 秒时迅速拉升到+6°/s,但这个变化过程是线性的、平稳的。在第1 秒到第5 秒之间,三自由度机械臂的末端速度一直维持在+6°/s,保持匀速运动、状态平稳。从第5 秒到第6 秒,三自由度机械臂的末端速度从+6°/s迅速调整到0°/s,线性减速、状态依旧平稳。
进一步观察三自由度机械臂的末端位移变化曲线,如图4 所示。
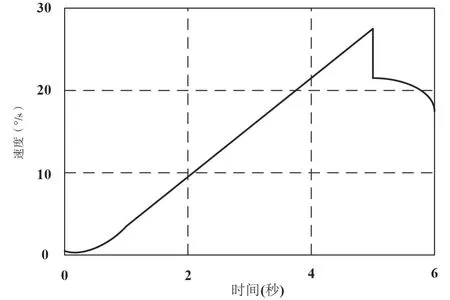
图4 三自由度机械臂末端的位移变化情况
从图4 中的曲线可以看出,在第0 秒后的一小段时间里,三自由度机械臂的末端位移有一个波动变化,这与其开始启动有关。然后进入线性变化阶段,一直持续到第5 秒。其后因为速度的逐渐消失,位移也开始回复调整。
目前,该文设计的三自由度机械臂末端已经在海洋石油平台进行了初步应用,该机械臂对设备零件和货物的抓取、搬运均显示出良好的性能,不仅能满足抓取精度和运输效率的需求,而且作业过程中的平稳性也较高。
4 结论
海洋石油平台在完成开采任务的过程中需要特定的机械完成抓取、搬运、运输等作业。考虑平台节省空间的原则,该文设计了三自由度机械臂。首先,从平移变换、旋转变换分析了三自由度机械臂的空间坐标变换关系。其次,给出了三自由度机械臂的结构设计和关键参数,进而进行了运动学分析并给出了D-H 关系表。最后,在MATLAB 环境下进行了三自由度机械臂的作业轨迹规划仿真试验。试验中3 个关节的旋转角度被准确计算,三自由度机械臂末端的加速度变化曲线、速度变化曲线、位移变化曲线均有效完成了预期动作并且状态平稳,充分证明了该文设计的有效性和合理性。
