山地丘陵地带无人机飞防模式研究与应用
2022-03-11马海涛刘聪聪
马海涛,刘聪聪
(1.威海市文登区自然资源局,山东威海264200;2.烟台云都海鹰无人机应用技术有限公司,山东烟台26400)
昆嵛山国家级自然保护区地处威海市西部,与烟台市交界,南北35 km,东西50 km,总面积1750 km2,以自然风光、名胜古迹和胶东革命胜地而闻名于世。山系沟谷纵横交错,多势高低起伏,山域广阔,林木耸密,森林覆盖率77.07%,其中赤松纯林和针阔混交林占森林总面积比例80%以上,拥有全世界保存最完好的赤松林,是中国赤松的原生地和天然分布中心,被誉为“胶东植物王国”。然而由于山区地理环境复杂,防治困难,自2006年发现松材线虫病以来,疫区面积、数量仍在持续扩大,严重威胁保护区植被安全。
松树线虫属线虫动物门、线虫纲、滑刃目、滑刃科、伞滑刃属。由于体型小,活动范围非常有限,无法通过自身活动来传播,一般是通过寄生在松墨天牛或其它昆虫上进行传播。由于目前国内外对松树线虫病致病机制方面的研究尚不够充分,无法确定致病机理,除通过加强检疫、严防扩散等管理措施以外,针对松树线虫病的防治措施主要包括通过根部浇灌和树干打孔注液、清除林间病死木等办法灭杀病原线虫,或者通过灭杀松树线虫病传播媒介—松墨天牛来切断松树线虫传播途径等2 种方式。
根部浇灌和树干打孔注液防治具有效果好、不受树木本体及周围地理环境影响、对环境污染小、药效期长等特点,但由于昆嵛山地势复杂、交通不便,有些地方甚至人迹罕至,这种方式作业效率极低、工艺复杂、费用高等原因,只适用于对名贵树木、纪念林等进行小面积防护,无法大面积推广。清除林间病死木是目前使用较多的一种防治措施,但由于松树多种植于山区,地形高低起伏,有些地方道路不通、人迹罕至,在实际操作过程中存在病树发现难、人工运输难等诸多问题,一旦处置不当,还会在运输过程中造成二次灾害,进而加剧了松材线虫病的传播。
利用化学方法通过灭杀松树线虫病传播媒介—松墨天牛来切断松树线虫传播途径是目前最常见,也是效果最快的防治措施。然而,在类似昆嵛山国家级自然保护区这种地理条件下,传统的人工植保模式无法完成,采用飞机或直升机植保方式在地形平缓地区效率高、效果好,然而在复杂山区,受地形和气流影响,飞行难度高,风险大,相对高度难以降低,易导致药液飘散,降低效果,甚至会带来次生灾害,也存在一定的风险。无人机植保具有机动灵活、效率高、效果好的特点,为在山地丘陵地带开展松树线虫病化学防治提供了一条全新的思路和途径。但由于目前自主控制技术尚不够成熟,无人机在山地飞行时只能依靠操控人员目视操控,作业范围有限、喷洒效果也难以保障,再加上受地形和气流影响,飞行安全压力较大。
综上所述,当前山地丘陵地带森林病虫害防治急需一套可操作性强、效率高的配套方案,本文针对传统松材线虫病防治措施在昆嵛山区面临的窘境,开展了“基于图像识别与仿地飞行技术的山地丘陵地带松材线虫病无人机防治系统”项目研究,利用无人机技术成熟、成本低廉、作业灵活等优势,结合正射影像采集、图像识别与定位、航线自动规划、仿地飞行等关键技术研发,将植保无人机系统的作业领域由平原大田作物拓展到山地丘陵地带森林植被,变传统淋洗式植保作业模式为定点精准施药,使得昆嵛山保护区开展无人机化学防治松材线虫病成为可能。
1 总体方案
系统总体方案由一套固定翼无人航拍机、一套多旋翼无人植保机,和一套图像识别与定位软件组成。总体组成与工作流程如图1、2所示。
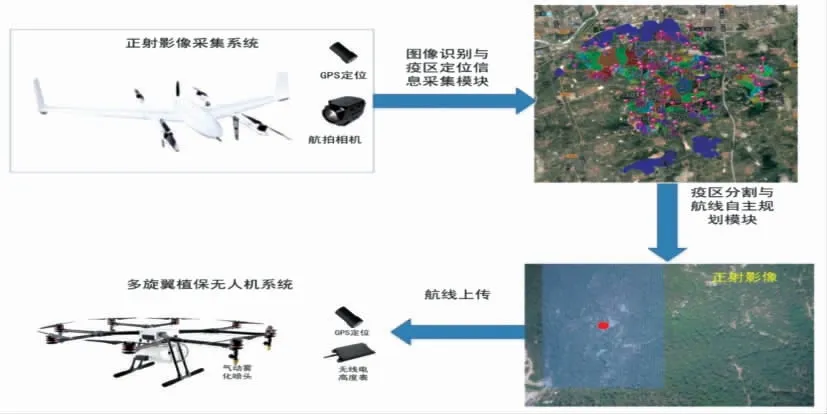
图1 系统总体组成示意图
飞防作业开始前,先由挂载正射相机的固定翼航拍机执行正射影像采集任务,依据正摄影像对昆嵛山作业区域划分成610 个网格(图3),根据网格内病死树木的图像识别结果,按照“不重不漏、航线最短”的原则进行航线规划。作业过程中,飞手只须每日领取对应网格任务,按规定航线飞行即可,大大简化了操作程序,减轻了心理压力,提高了作业效率,保证了飞防作业的时效性和安全性。
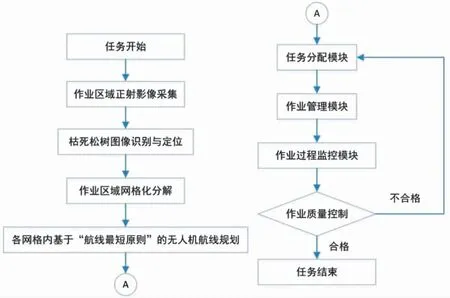
图2 昆嵛山松材线虫病无人机化学防治工作流程图
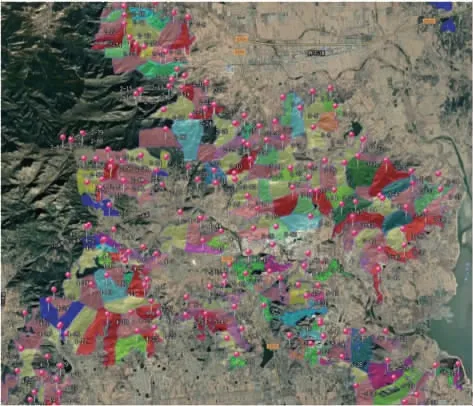
图3 昆嵛山林区网格划分示例
2 防治保障方案
2.1 作业实时监控
作业质量控制模块可实时、直观记录,实时显示无人机当前位置、工作状态、飞行速度、飞行高度、航线间距、药液流量、剩余药量、作业面积等参数,作为飞防作业质量控制的主要措施,也是飞手工作量认定的主要依据,并可根据飞行时间、剩余药量等参数实时提醒飞手换药和清洗喷头等业务操作。
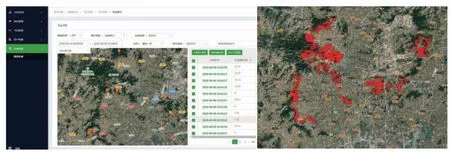
图4 质量控制模块参数监管平台及航线展示
植保效果一在飞行,二在药液。为保证药液真实有效地被使用,本方案采取药液集中配制,远程监控药液加注的方式进行管理。在作业期间,配备专人负责药液的配制和发放,同时严格管控每架次飞行加药情况,要求每位飞手每次起飞前以时间相机记录加药视频,与飞控记录起飞时间正确对应后方算为有效架次,每日计算药液使用量与作业面积,经实践证明,在管理药液配制和监管药液加注后,药液使用量与作业面积始终处于合理范围内,证明此管理方式有效可靠。
2.2 随机水敏测试
项目实施过程中在飞防区域随机选取松树,在树上部、中部、下部铺设水敏试纸,检测雾滴穿透效果;在区域内挂设天牛诱捕器,监测天牛数量变化,间接反馈飞防作业效果(图5)。

图5 雾滴穿透监测
3 关键技术
3.1 图像识别与定位技术
图像识别模块通过固定翼无人机高空拍摄林区图片,自动识别出含有松树线虫病病死树木的高空影像,对收集的正摄遥感影像进行整合拼接处理(采用CGSC2000 坐标系),将其裁剪拆分后进行松树线虫病松树标注,生成标注样本,运用神经网络深度学习算法对松材线虫病病树训练样本进行训练,得到可用来检测松树林中松材线虫病病树的检测模型。
2020年11月收集昆嵛山山林区域(经度:121.78°—121.83°E,纬度37.27°—37.29°N)图片11000 多张,运用YOLO-V3 深度学习算法训练模型,训练模型周期100,选取最优模型(mAP值为0.0005257324068131221,Total loss 值为0.13596370816230774)。共识别检测松树线虫病病情区域12762 处。截取某区域案例显示,该区域人工识别病树区域106 处,图像识别病树区域101 处,检测识别错误区域1 处,检测未识别区域6 处,综合识别率为94.3%。
3.2 航线自主规划技术
航线自主规划模块根据图像定位、识别模块输出的疫区识别结果,结合无人机当前位置、姿态、运动信息,按照“不重不漏、航线最短”的原则开始航线规划,规划结果在地面站显示,并提示地面站操作人员是否切换为新路飞行。航线自主规划的限制条件包括:
(1)以疫区图片中心为原点,以疫区边界距原点的最远距离为参考,外扩10 m 生成疫区作业区域;
(2)沿原航线的横向设计新任务航线;
(3)新航线切入点、切出点均在原航线上。
航线自主规划模块流程和原理如图6所示。

图6 航线自主规划流程
3.3 基于无线电高度表的无人机仿地飞行控制技术
为适应昆嵛山地势起伏,以电动四旋翼无人机为飞行器平台,通过数图一体化传输系统与地面控制站进行信息交互,上传地面站飞行控制、任务控制指令,下传任务设备数据及飞行姿态、运动及位置等定位与导航信息,实现对飞行器系统的控制与管理。硬件组成如图7所示。
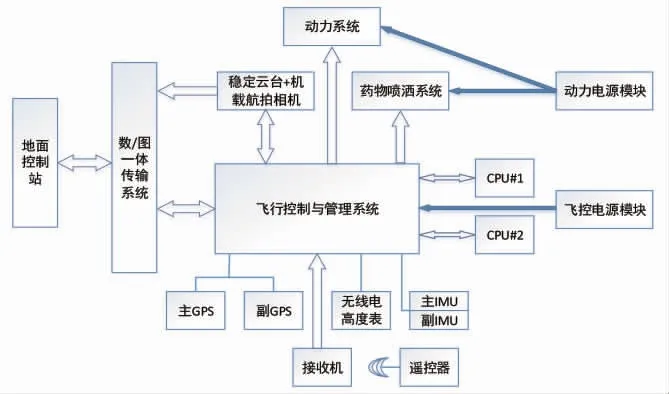
图7 飞行器系统整体组成框图
仿地飞行控制与管理系统通过采集无线电高度表、GPS 接收机等机载传感器信息,与机载惯性传感器计算的高度值通过数据融合算法实现对当前位置的精确定位,和下一时刻航点位置的精确估算。算法流程如图8所示。
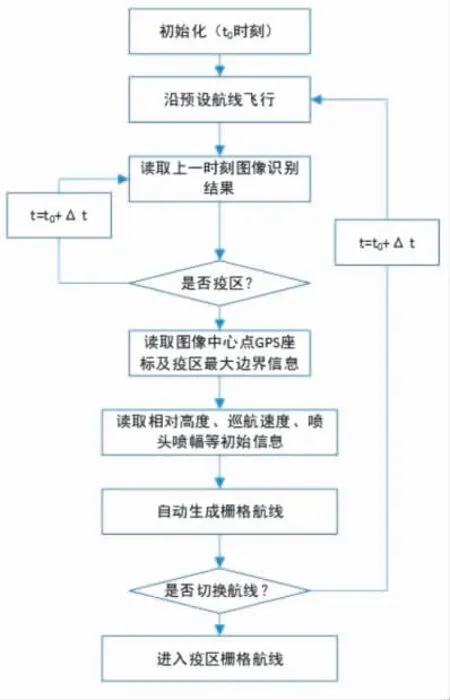
图8 航点推算流程图
当前航点位置估算采用卡尔曼滤波算法。卡尔曼滤波利用上一时刻状态的估计值和当前时刻的观测值,采用递推方法,解决以均方误差最小为准则的最佳线性滤波问题。经典卡尔曼滤波模型适用于线性系统,本系统使用GPS/INS 进行纵使时的状态模型和观测方程均为非线性,反对数码单反函数模型进行线性化。
由状态方程和量测方程2 部分组成。
状态方程:xk=AkXk-1+ωk-1
观测模型:yk=CkXk+vk

经推导可得一组卡尔曼一步递推公式:

假定Pk表示均方误差阵,且为:

令:

新航点采用基于无线电高度表的航迹推算算法。仿地飞行阶段相对高度变化量的估算如图9所示。
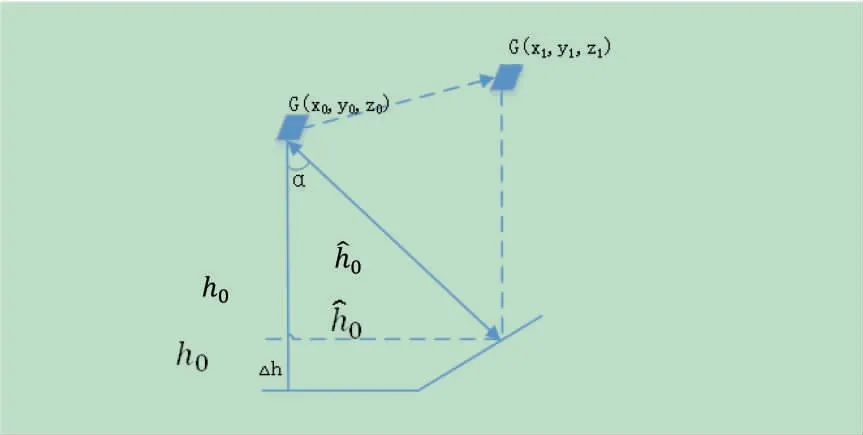
图9 仿地飞行高度测量原理图
图中,h0为当前航点的高度值,如果处于仿地飞行阶段,该值在理论上应等于预先设定的航线相对高度值;为无线电高度表测量值,用于估算下一时刻航点数据;α 为无线电高度表的前倾安装角,其值由飞行高度、速度、最大爬升等参数共同确定。
由图可知,下一航点相对高度变化量、变化率可由下式计算:
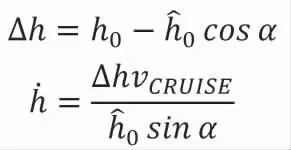
式中,vCRUISE是指起飞前预设定的无人机巡航速度。
3.4 气动雾化喷头与多喷嘴组网技术
昆嵛山林区树高、林密,普通喷头雾化过细,穿透力有限,公司专门针对昆嵛山林区植被情况进行了调研,重新选配了雾化喷头,通过多喷嘴组网技术,确保对病区树木横向包围、纵向穿透,确保植保效果(图10)。
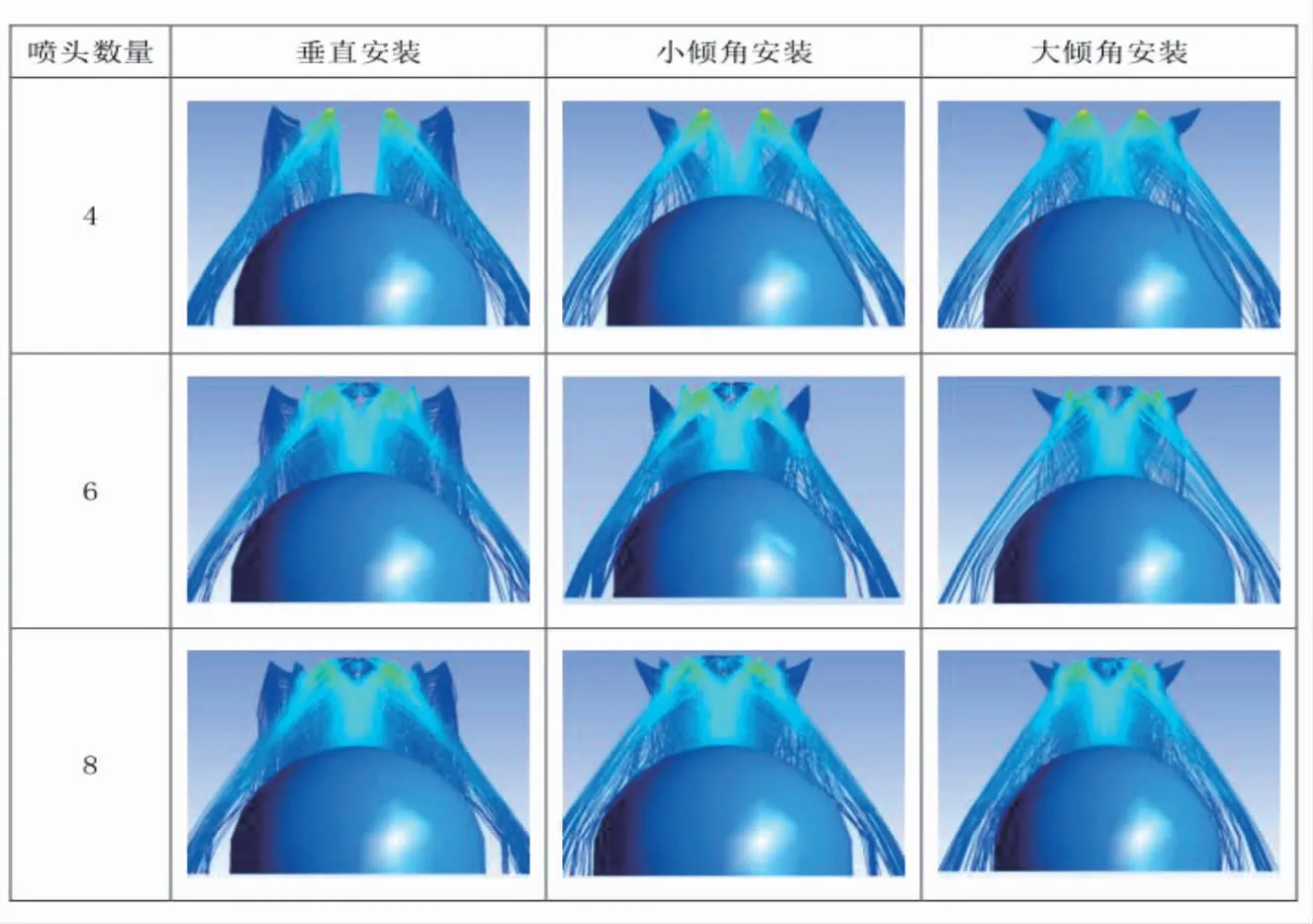
图10 喷头组网喷洒效果CFD 仿真图
4 应用与效果评价
2020年6月—9月,威海市文登区、乳山市先后3 次组织实施无人机施药,涉及大水泊、侯家镇、经济开发区、高村镇、泽库镇、龙山街道、泽头镇、界石镇、葛家镇、文登营镇、米山镇、环山街道、天福街道、宋村镇、张家产镇、莒格庄、午极镇等17 个镇(街)松林区域。飞防所用药剂为3%噻虫啉、8%氯氰菊酯触破式微囊悬浮剂。
共投入140 套无人机系统,作业人员200 余人,共计完成4.35 万hm2次飞防任务,日均作业2466.7 hm2,是全国首例山地大规模作业,飞防效果显著,开创了无人机在山地大规模植保作业的先河。
通过对作业飞机随机雾滴监测,数据表明,此次飞防作业满足雾滴覆盖密度10 个/cm2以上的作业要求,并且在树干周边林下穿透雾滴基本达到2 个/cm2以上,具有较好的雾滴穿透效果;飞防作业对于作业区域松褐天牛数量遏制趋势明显,飞防效果显著。
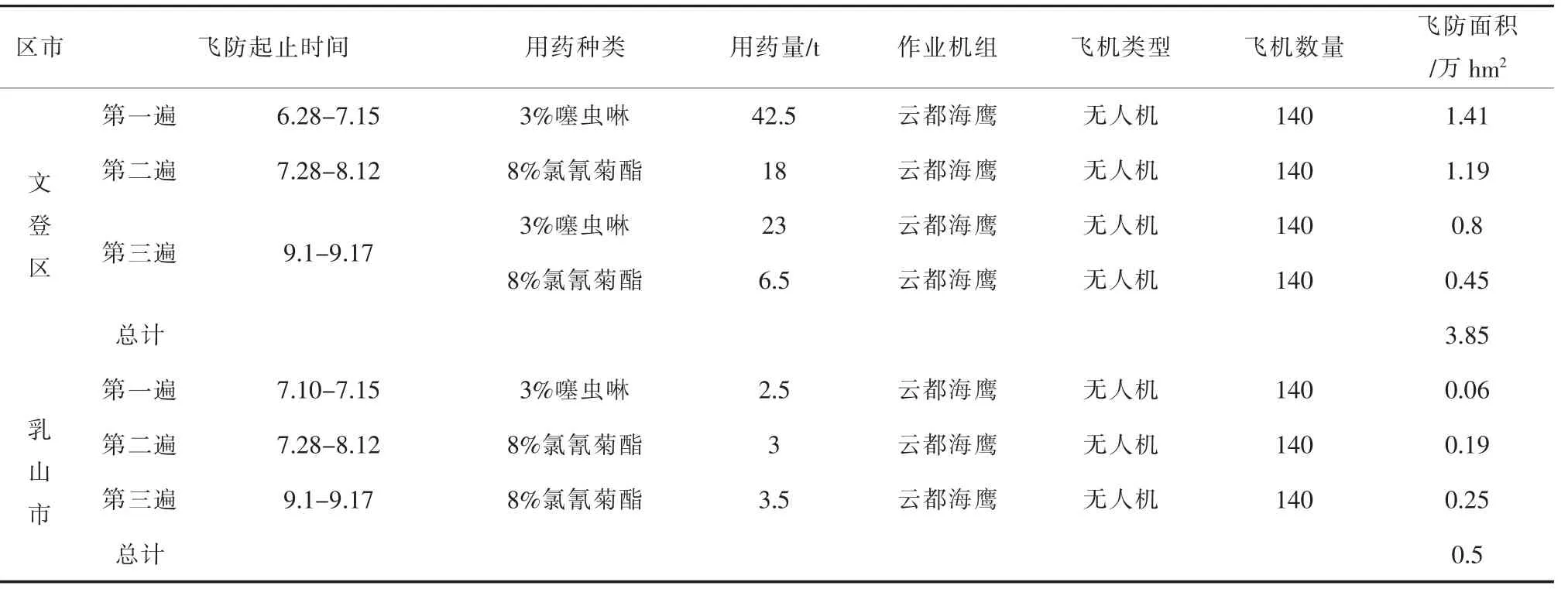
表1 无人机防治作业情况一览表
5 结论
本文重点针对山地丘陵地带无人机飞防作业模式进行了探究与应用,开发出一套基于仿地飞行与图像识别技术的无人机化学防治系统,并进行了试验验证,得出如下结论:
(1)本文提出的系统是一套全新的、高效的、精准的化学防治系统,具有作业效率高、防治效果好、劳动强度低、施药精准无浪费、安全可靠等特点,可用于山地丘陵地带森林飞防或果树植保,为交通不便、地理环境复杂的山地丘陵地带松树线虫病全面、精准防治提供了可能。
(2)提出了一套适用于山地丘陵地带的无人机飞防作业模式,由一套固定翼无人航拍机、一套多旋翼无人植保机,和一套图像识别与定位软件组成,并完成飞防作业面积4.35 万hm2次,效果显著。
(3)本文所研究的山地丘陵地带无人机飞防模式为国内森林植保行业发展提供了理论参考与实践指导,可推广应用于绝大多数山地丘陵地带飞防作业中。
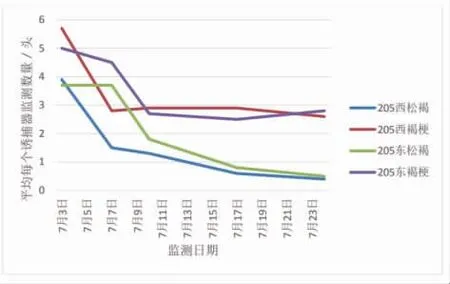
图11 飞防区内天牛数量检测
