基于小波时频偏相干分析的车内异响声源识别及改善
2022-03-09陈长征
李 皓,陈长征,王 洁
(沈阳工业大学 机械工程学院,沈阳 110870)
汽车对于人们来说不仅是一种交通工具,也可以是花费大量时间的办公室或休闲场所,因此汽车研发的种类也越来越多,以适应于不同的需求,例如近几年兴起的房车,可以满足人们外出旅游日常生活的需求;又如货车可以满足人们实现运送货物的需求。随着科技的进步,人们对乘坐汽车时舒适程
度的要求不断增高,车辆内部噪声过大会影响驾乘人员的使用体验,过高的车辆噪声使驾驶员容易疲劳,也会对乘坐者的身心健康产生不良影响。因此,降低车内噪声一直是车企在制造汽车时关注的焦点。不断提升汽车的NVH(Noise,Vibration and Harshness)性能已经成为汽车厂商一种独特的营销手段,更是一个汽车品牌核心竞争力的体现。据统计,汽车故障投诉中约有一半是由于车辆振动噪声引起的。因此,更准确、快速地识别并控制噪声是势在必行的。
噪声源识别技术是车内噪声控制的基础。目前对车辆噪声源识别方法可分为三大类:传统噪声源识别方法、基于信号处理技术的噪声源识别方法和基于可视化技术的噪声源识别方法[1]。每种方法都有各自的优缺点,因此在实际应用中需要根据实验的工况进行选择。陈书明等[2]使用小波分解的方法对车辆在匀速水平路面上的噪声源进行了识别,通过对信号进行6 级小波分解并进行相关分析,分析出发动机噪声对车内噪声的贡献度最大,此方法对各个噪声源相互独立识别时效果较好。但由于汽车噪声声场比较复杂,各个输入信号并不相互独立所以很难准确识别并得出正确结论。杜亮等[3]使用波束形成方法和声全息方法对静止声源进行识别,此方法通过取长补短,将声全息方法在识别低频噪声方面的优点与波束形成方法在识别高频噪声方面的优点相结合。但汽车噪声在行驶过程中才会产生且属于运动噪声源,因此,使用这种方法很难达到预期。熊建强等[4]使用偏相干分析方法对怠速工况下的车内噪声源进行了识别,效果比单纯使用相干分析更佳,但该方法只计算了幅值信息,并没有进行相位分析,其中建立的6 输入单输出模型并没有考虑到一些隐藏的声源,同时也不能消除这方面噪声对其影响。因此,研发一种完善的噪声源识别方法是很有必要的,而且对汽车厂商提升车内品质,和对故障车辆快速准确找到故障点都有着重要意义。
本文针对车内异响问题提出一套噪声源识别方案。首先进行初步噪声评估,根据评估结果确定噪声源测点的布置方案进行实验测试,其次对采集的信号先进行高通滤波处理,再对其进行小波偏相干分析,从而得到噪声源测点和驾驶室右耳处的小波时频偏相干函数谱和相位谱。最后,根据分析图谱确定异响位置,对其提出整改措施并进行验证。研究结果表明该方案可在多相关复杂声场下对汽车噪声源进行快速准确的识别,且识别效果较好。
1 理论基础
1.1 小波变换
小波变换是以傅里叶变换和短时傅里叶变换为基础引进的,能够实现针对不同频率的信号采用不同分辨率。小波变换可以分为连续小波变换(Continuous Wavelet Transform,CWT)与离散小波变换(Discrete Wavelet Transform,DWT)[5]。假设待分析信号为x(t),则x(t)基于连续小波变换定义为:

式中:τ为尺度参数;a为平移参数;C为小波系数;ψa,τ(t)为小波母函数ψ(t)经缩放平移得到。
对时间序列进行小波变换时,通常为了获得平滑连续的小波振幅而采用非正交小波函数。此外,采用复小波能够提取信号的幅值和相位两方面信息,可对信号进行更全面的表达,本文应用具有非正交性的Morlet小波进行CWT,其表达式如下:

式中:ω0为小波带通滤波器中心频率;当ω0=6时,小波尺度s与傅里叶周期基本相等,所以尺度项与周期项可以相互替代。由此可知,Morlet 小波在时间与频率局部化之间保持着很好的平衡[6–7]。
1.2 尺度参数自适应模型
在CWT算法中,尺度参数的选择至关重要。前人选择尺度参数方法都是针对不同信号靠人工方式设定。但信号的种类一旦改变,尺度参数的设置就特别困难。因此,本文针对此问题采用尺度参数自适应模型,使用多尺度微分算子自动调整尺度范围。
式(1)能被重写为多尺度微分算子(MDO)形式:

式中:θ(t)是高斯函数。
首先,根据式(3),取θ(t)=π14exp(-t2/2),于是有:
令K=2,式(3)变形为:

通过Nguyen[8]等提出的方法构造过零线求得峰位ui和标准差σi,由τi=2.237×σi计算得到每个波峰处的最佳尺度。然后,绘制关于尺度的概率分布图,取5 %和95 %分位数时的尺度分别作为τmin、τmax。
最后,在最值范围内等差取20个值组成新的尺度参数向量,表示为:

1.3 小波偏相干分析
偏相干分析理论是在常相干分析的基础上演变而来的。常相干分析并未考虑输入信号之间的影响,若输入信号之间的常相干系数接近0时,输入信号之间不存在必然的因果关系,则通过常相干分析方法识别噪声源就能得到比较准确的结论。但若输入信号之间的常相干系数偏高,使用常相干分析方法识别噪声源就会存在较大的误差[9]。而通过偏相干分析噪声源识别方法就考虑到了这个问题,即在消除各输入信号之间的影响后再做相干分析,这样在噪声源识别中,输入信号之间影响较大的时候,偏相干函数识别噪声源的方法就能得到更为精确的结果[10]。
对于任意的输入信号i,j,在去除条件信号k(i,j≠k)情况下的条件自谱与条件互谱可分别由下式表达:
式中:Sii与Sij分别为信号i,j的自功率谱函数与互功率谱函数,把经过连续小波变换的时频小波系数Wn(s)进行功率谱计算即可求得自谱与互谱,其它项同理。基于此可定义输入信号i与输出信号y在条件信号k下的偏相干函数γik.k2,如式(9)所示:
其时频相位信息可由式(10)进行计算:

式中:Phasem为平均相位;arg 为复数的幅角;n为进行平均的数据点数[11]。
2 实验测试
2.1 车内噪声初步评估
本文以华晨宝马3 系车辆为研究对象,在进行噪声源识别实验之前先由经验丰富的汽车工程师进行现场主观评估。根据初步主观评估得知:当汽车以80 km/h的速度在沥青路面上匀速行驶时,车辆底盘方向存在连续吱嘎吱嘎的异响和间断金属撞击声音,但在车辆熄火滑行时连续异响声音消失。因此判断车内工程师听到的连续异响不是由于胎噪引起的。当车辆在水平笔直的沥青路上从0 加速到80 km/h 时,汽车底部的噪声有所增大,且车辆在通过砂石路时底盘噪声明显加剧;但当汽车在转弯和刹车时车内噪声并无明显增大,因此判断工程师听到的异常噪声可能来源于动力总成部位、前后轮部位、变速器和发动机。为了准确判断异常噪声的来源需做进一步分析,据此建立车辆异响层级分解体系,如图1所示。
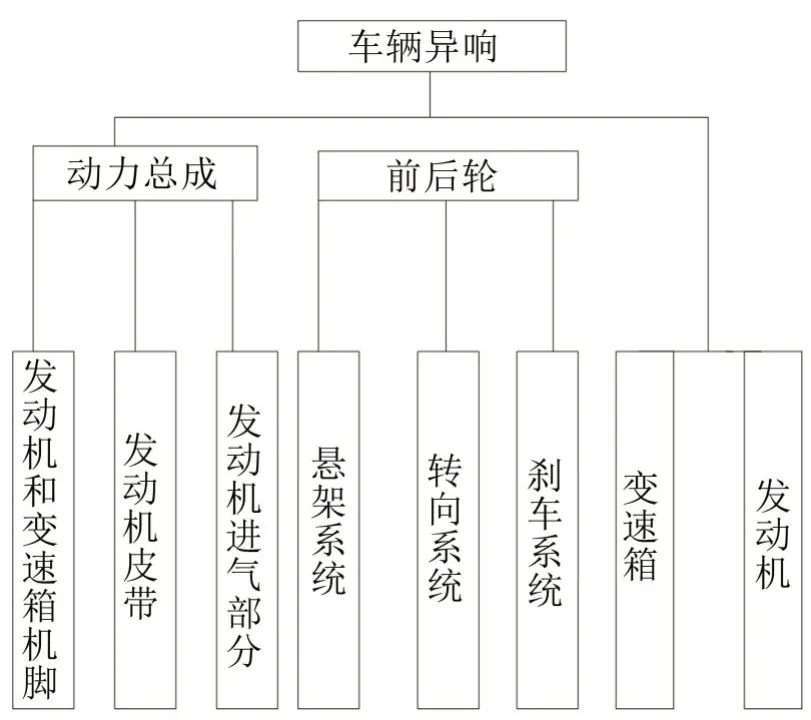
图1 车辆异响层级分解体系
汽车的动力总成通过发动机和变速箱的作用连接架和支撑架固定在车架上。其中,车架上安装的减振胶块会随着使用时间的增加不断老化直至失去减震的作用;随着汽车使用里程数增加,发动机皮带表面摩擦系数将随之不断减小。而且,若动力总成产生异响,车辆将伴随着明显的抖动,但本试验用车并无明显抖动,因此排除车辆的异响噪声来源由动力总成。由于刹车和转弯时车内异响噪声无明显增大,所以排除刹车系统和转向系统。因此初步判断车内异响可能来源于发动机、变速器和悬架系统。
2.2 详细测量
为了进一步确定车辆噪声来源,对车辆发动机、变速器和悬架系统再一次进行道路试验。本试验在水平笔直的沥青路面上且周围背景噪声较低情况下进行,试验工况分为匀速行驶和匀加速行驶。由于该异常噪声可能为结构振动噪声或为空气传播噪声,因此具体的试验测点布置情况如表1所示。
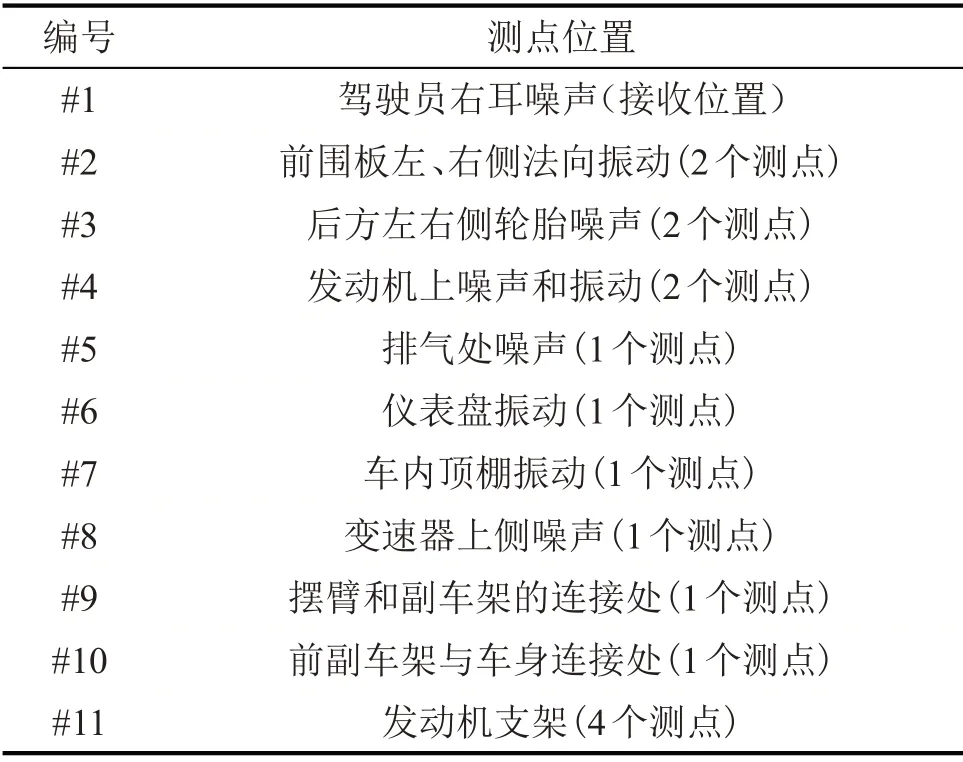
表1 整车道路实验测点布置
本试验数据采集分析系统均采用东华测试DH5902,加速度传感器采用东昊测试DH186,传声器均为东昊测试麦克风。为考虑驾驶员的安全性,选择驾驶员右耳处声压作为车内噪声的参考点,麦克风的位置根据GB/T18697 标准进行布置,在座椅表面与靠背表面交线(0.7±0.05)m 处,且保持水平。本次试验的车内噪声参考点声压传感器具体布置如图2所示。

图2 车内噪声声压测点布
为了记录来自空气噪声源的噪声,将其中一个麦克风安装在发动机中心后侧,另一个麦克风安装在变速器中心后侧。为测量轮胎/道路噪声,将麦克风安装在距离轮胎0.1 m且距离地面0.1 m处。由于面板辐射的噪声与其振动幅值相关,因此,用面板振动幅值间接近似近场结构噪声。将加速度传感器分别安装在摆臂和副车架的连接处(靠近橡胶衬套连接处)、前副车架与车身连接处(靠近螺栓连接处)和驾驶员地板与仪表板中心处。加速度传感器放置在连接位置的主受力方向和面板振动的法向位置上。由于面板副车架和面板悬架是对称的,因此只测量了车辆左侧的振动面板副车架的振动。此外,为了测量发动机振动和发动机支架的隔振特性,在发动机顶部和每个发动机支架的两侧安装了加速度传感器(其中三个支架连接到车身,一个后支架连接到前副车架)[12]。
2.3 实验数据分析
对测量的噪声与振动信号进行信噪比检测,检测得出采集信号的信噪比均大于20 dB,说明对整车道路试验的测试条件控制较好。然后对噪声信号进行20 Hz 高通滤波,再通过小波偏相干分析对车内异常噪声源进行识别。
图3所示为80 km/h 加速工况下驾驶员右耳噪声时域信号和经过20 Hz 高通滤波后的时域信号。由于测点较多本文只图示了部分典型测点,如图4为发动机左侧支架上振动(#11)、图5为变速器上噪声(#8)、图6为摆臂和副车架的连接处振动(#9)、图7为副车架和车身的连接处振动(#10)。图5所示为小波偏相干分析后的偏向干系数,由图可得出,在消除其它噪声振动的影响后,变速器上侧噪声与车内噪声没有明显的偏向干关系。由图4可发现车内噪声和发动机振动在频率1 000 Hz~2 000 Hz 处有明显的偏向干关系,同时相位延迟了45°,经过转速信号得知,该车辆发动机转速为2 000 r/min。因此,判断车内噪声是由于发动机振动带动其他子系统引起的。由图6可知,车内噪声与摆臂和副车架的连接处在中心频率为1 500 Hz~2 000 Hz 处有明显的偏向干关系,同时相位延迟了135°。
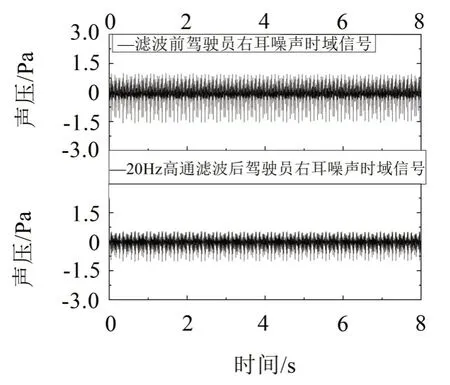
图3 匀速工况下80 km/h车内驾驶员右耳噪声信号

图4 车内噪声与发动机振动小波时频偏相干系数
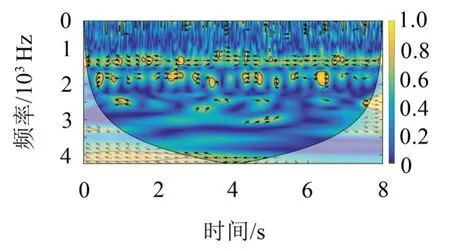
图5 车内噪声与变速器噪声小波时频偏相干系数
如图7所示,车内噪声与副车架和车身的连接处在1 000 Hz 处有明显的偏向干关系,因此车辆的连续异响是由于发动机异常振动带动摇臂和副车架晃动、副车架和车身撞击产生车身振动传递到车厢内形成的共振噪声。

图7 车内噪声与副车架和车身的连接处振动小波时频偏相干系数
3 车内异响原因及改进方案
3.1 车内异响原因
由上述分析可知车内异常噪声来源于三个方面:一是由于摆臂和副车架是用衬套套管加螺栓连接,当汽车行驶里程过长或驶过减速带和颠簸路面时,其连接处因为发动机激励导致的摆臂衬套和副车架错位振动从而产生异响。二是由于副车架和车身使用长螺栓连接,且两者之间的接触面都为金属,在行使过程中一旦发生螺栓松动或螺纹摩擦系数降低就会导致副车架和车身之间发生滑移而产生异响,特别在颠簸路面行驶时异响会加剧。三是来源于发动机支架,支架是用来连接发动机和机身以及减弱发动机自身的振动,该车辆发动机左侧支架橡胶的破损导致内部的液压油泄露,使其丧失了减弱发动机振动的功能,同时由于发动机的振动使上下两个支架之间的距离缩短导致异响,异响通过车身传递到车内形成共振噪声。
3.2 车内异响改进方案
针对发动机振动激励导致的摆臂衬套和副车架错位振动问题,可以对此处螺栓和衬套进行优化设计与改进,通过优化设计提升摆臂和副车架之间夹持力。针对副车架和车身发生滑移产生异响问题,可以通过在副车架和车身的安装点处增加防滑垫片的方式来增加接触面的摩擦系数,在相同的预紧力作用下可以提供更大的剪切力,使连接更稳固。针对发动机处产生的共振噪声,在拆下支架后发现上下支架之间有明显的碰撞痕迹,因此,可以通过更换左侧漏油支架,并在碰撞点处增加橡胶垫片的方式进行改进。
对改进后的车辆再次进行相同工况下的路面测试。测试时车内并无异常噪声。图8所示为80 km/h匀速工况下,车辆改进前后驾驶员右耳处的时域信号对比图,改进后车内噪声相比改进前车内噪声有所降低,特别是在出现异常噪声时,相比改进前声压级降低了15 dB。
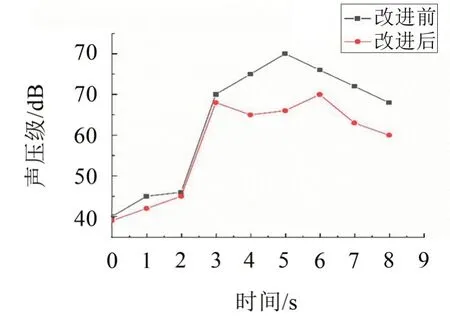
图8 改进前、后测点1的声压级对比
图9为车辆改进后车内噪声与发动机振动小波时频偏相干图,对比发现在频率1 000 Hz~1 500 Hz时两者无明显偏相干关系,在频率1 500 Hz~2 000 Hz时偏相干关系大幅度降低。
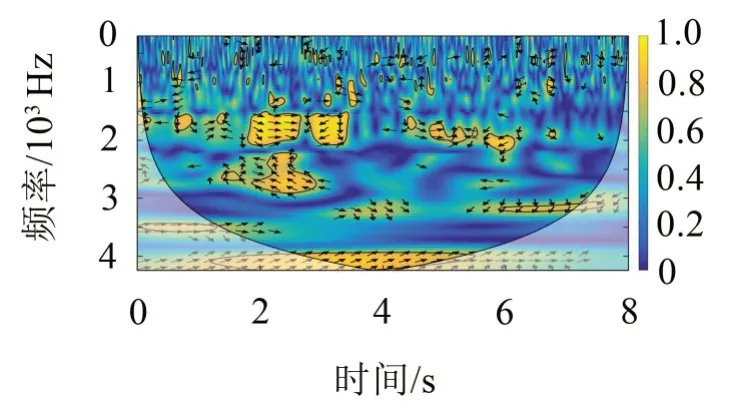
图9 改进后车内噪声与发动机振动小波时频偏向干系数
图10为改进后该工况下,车内噪声与摆臂和副车架连接处的小波时频偏相干图,对比发现两者无明显偏相干关系。

图10 改进后车内噪声与摆臂和副车架的连接处的小波时频偏相干系数
图11 为车内噪声与副车架和车身连接处的小波时频偏相干图,对比发现两者无明显偏相干关系。
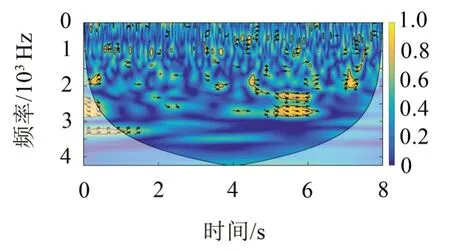
图11 改进后车内噪声与副车架和车身的连接处振动小波时频偏相干系数
4 结语
本文将小波偏相干分析引入到华晨宝马3系汽车的异响声源识别方法中,并采用尺度参数自适应模型,通过多尺度微分算子自动调整连续小波变换的尺度范围,解决了人工设置尺度参数的困难,并提高对信号特征的识别能力。将测量到的噪声测点与声源位置进行小波偏相干分析,同时获取到偏相干函数和相位关系。结果表明,对车内噪声异响的车辆使用该方法可快速、准确地找到故障点位置。而且,基于本方法识别的结果而提出的改进方案对车内噪声有明显改善,证明了该方案的可行性。