基于区块链的无人机集群抗干扰通信模型*
2022-03-08王浩同刘白林刘智平
王浩同,刘白林*,刘智平*,李 藕,赵 涛
(1.新型网络与检测控制国家地方联合工程实验室,西安 710021;2.西安工业大学计算机科学与工程学院,西安 710021;3.西北机电工程研究所,陕西 咸阳 712099)
0 引言
随着多智能体系一致性协同控制理论的发展,对无人机集群作战系统的研究具有极为重要的现实意义,在军事和民用领域具有广泛的应用前景。2015年8 月,美国国防高级研究计划局宣布启动分布式低成本无人机集群“小精灵”研究项目,计划从敌方防御范围外大型飞机上发射可回收的小型无人机集群,通过集群战术对敌方进行压制,并于2018 年4月,DARPA 宣布该项目已经进入飞行试验阶段[1-2]。2018 年1 月,国防科技大学试验了20 架固定翼无人机自主作战,成功实现了国内首次微型折叠翼无人机双机低空投放和模态转换试验[3]。但是无人机集群并不是简单数量叠加,而是集群组网,组网无人机作为网络节点互相进行数据交互和反馈。在2017 年无人机系统教育与发展研讨会上曾提出过利用多无人机组成MAS 进行有关操作的决策,展示了如何利用以太坊区块链技术在无人机设备间构建通信系统[4]。目前无人机集群为了能够满足复杂环境下编队通信的需求,集群通信方式大多采用移动自组织网络技术,空军工程大学在此基础上提出一种解决通信时延方法,能够保证在有向通信拓扑条件下保持编队稳定[5]。但是无人机集群通信网络在复杂、对抗、非合作、不透明的战场环境下,战场环境中存在多样不确定性,敌我电磁信号复杂耦合,相互干扰。无人机集群作战过程中,为保证作战需求,无人机集群编队需要实时共享有效准确的飞行数据以及作战指令等信息,比如无人机集群编队领航机的速度、姿态、位置等飞行数据,需要通过集群网络按照特定的通信频率发布给其他在编无人机接受指令,如果在数据传输过程中遭遇非合作性电磁信号干扰,将导致无人机集群组网通信失败,严重影响战场局势。对此,将传统无人机“蜂群”技术赋予智能化的同时,需要降低无人机集群网络战场通信时延,提高其战场生存时间[6]。
1 无人机集群网络抗干扰技术
无人机集群传统分布式自组网络在实际应用中,尤其是应用于战场环境时,无人机集群中的每一个个体都可以作为一个自主和自治的智能体,并具备一定的感知、推理和决策功能。但战场周围的电磁环境十分复杂,在复杂、对抗、非合作、不透明的战场环境下,战场环境中存在多样不确定性,敌我电磁信号复杂耦合[7],相互干扰,既有敌我双方众多无线系统之间的电磁兼容性问题,又有敌方针对性的电磁干扰问题。本文针对敌对非合作性通信干扰,使得无人机集群网络的各节点通信安全受到严峻挑战的问题,提出了一系列无人机集群抗干扰相关技术及应用场景。
1.1 网络抗毁设计
当军事通信网络某一控制单元节点被敌方摧毁时导致该节点数据丢失,该网络能产生新的控制节点,重新实现自组网,保证剩余节点能够维持正常数据传输。由于目前信息化战争时代,军事通信网络在作战过程中容易成为敌方攻击的目标,对此需要重点考虑网络抗毁设计[8-9],提高网络通信过程中的抗干扰性能。由于网络抗毁设计需要在遭受敌方干扰后实现自组网,重新搭建通信链路,过程需要巨大的计算量。无人机以其机载计算机难以承担巨大的计算量,在短时间内难以完成通信链路恢复,一定程度会影响作战指令发布的实时性。
1.2 低截获技术
低截获可以通过隐蔽波形、功率控制以及空域分割3 种技术实现,针对不同的作战应用场景,设定不同的作战应用波形。单一的抗干扰波形难以适应于真实战场环境,需要结合信道编码等技术提高抗干扰能力。在此过程中,考虑到无人机所携带电能供给难以为功率控制提供能源保证,从而不仅降低功率控制效率,而且会影响无人机动力能源供给时间,缩短任务有效执行时间。
1.3 电子抗干扰技术
可选择的抗干扰技术包括变换域数字处理技术、强干扰电子抑制技术、通信信道编码技术、抗干扰调制解调技术、自适应滤波技术等[10]。此方法需要无人机携带有专业射频设备来实现强干扰电子抑制,但专业设备的载重量会大大限制无人机自身武器以及侦查设备携带量。
1.4 身份识别技术
在战场上,敌我军事电子对抗中,敌方可以伪装我方识别信号节点,然后将伪节点侵入无人机集群网络,导致网络崩溃[11]。由于身份识别技术不具备伪装节点验证机制,导致敌方可以轻易伪装节点并接入我方通信网络[12]。而通过区块链可以采用一种群体决策投票验证机制,为无人机集群通信数据传输安全以及通信网络抗干扰能力提供技术支持。
1.5 区块链通信技术
随着区块链技术的不断发展成熟,区块链去中心化自治组织的理论逐步走向实际应用。在无人机集群组网通信领域,区块链可以将集群中每一架无人机作为一个网络节点,所有节点共享并共同维护一个无人机集群策略的运行[13]。在2017 年的IEEE军事通信会议上,提出一种利用区块链技术解决无人机和控制系统间通信的分布式解决方案[14]。同时海军工程大学的刘宏波团队提出蜂群无人机自组网协议设计,很好地解决了组网通信实时性的问题[15],为区块链技术应用于无人机集群组网通信奠定了基础。
2 无人机集群网络抗干扰模型
2.1 基于区块链无人机集群通信模型框架
为了充分发挥区块链技术的特性,在无人机集群应用中突显出抗干扰优异性能[16-17],本文搭建基于区块链的无人机集群抗干扰通信网络,具体抗干扰通信网络如图1 所示。
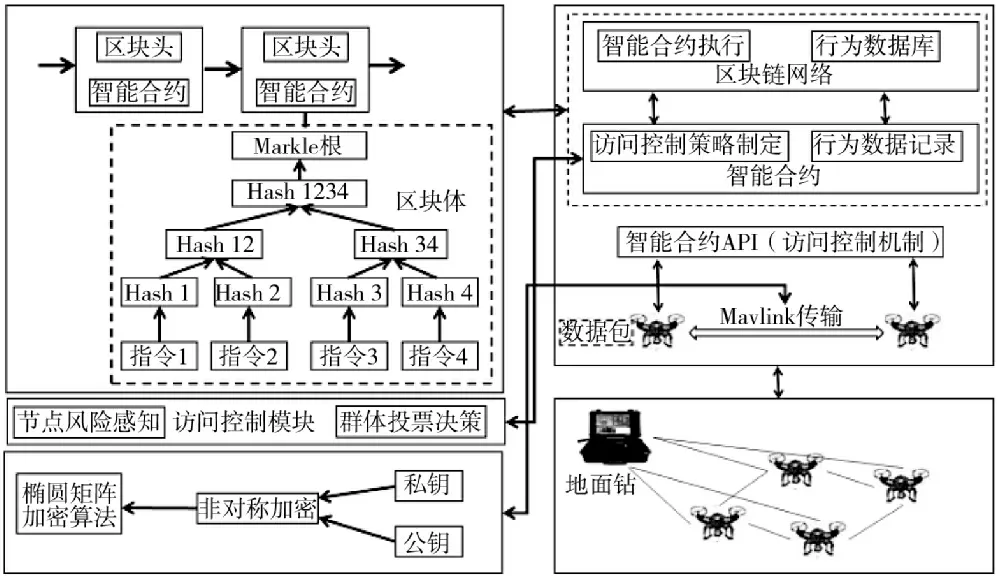
图1 抗干扰通信网络示意图
其中抗干扰通信网络的运行过程如下:
1)当该通信网络开始运行时,无人机机载终端之间相互发送带有本机终端验证码(机载终端ID号)的问询信息,并应答剩余机载终端发来的问询信号,进而可以确认本次通信过程中网络中参与互联的终端数量,此时各无人机机载终端生成一个新的区块。
2)当地面站发送作战指令或飞行数据经由通信系统发送时,选择就近的通信机载终端接收发送指令,该终端将带有本终端验证码(机载终端ID号)的发送问询信息以网络广播的形式发送至其他机载终端,其他终端接收到该问询信号后进行回复。问询过程中区块链节点根据预定义的访问控制逻辑决策无人机节点的访问权限[18]。因此,攻击者无法简单地通过入侵单个节点来篡改节点的访问权限。当回复的终端数量大于(n-1)/2 时,才会进行信息发送,增加了对节点的攻击难度,提高了无人机集群网络中分布式访问控制的安全性。
3)每当该网络中节点进行数据发送或数据接收,则生成一个新的区块,并将新的区块链入到现存的区块链中,将进行数据发送或数据接收的终端的区块链定义为全局区块链。在数据通信过程中,采用椭圆矩阵加密算法进行加密传输。
4)每个机载终端除储存完整的区块链外,还储存一个仅由各区块校验信息组成的日志链[19-20],这将都存储在行为数据库中。结合群体投票决策机制,每隔一定时间,各终端将把自身的日志链广播至其余终端,若接收到的日志链信息与本终端存储的不同,则回复自身的区块链至日志链发送方。同理,当某个终端收到数量大于(n-1)/2 的区块链回复时,将自身的区块链更新为全局区块链。
根据提供的无人机集群通信网络模型,将其部署在无人机机群,该通信网络模型中各无人机节点间通信依然通过原有无人机mavlink 通信协议来实现,具体Mavlink 协议格式如图2 所示。但由于不同版本的Mavlink 协议所使用的的校验码会不同,不同版本之间通信时存在校验不对等问题。对此需要通过椭圆矩阵加密算法获取公私钥完成数字签名验证,来改进原有无人机Mavlink 通信协议中的CRC 校验方式,扩展Mavlink 消息包添加公私钥取代原有Mavlink 协议中16 位CRC 校验位,从而提高数据传输安全性,有效解决通信协议版本带来的潜在通信障碍[21-22]。
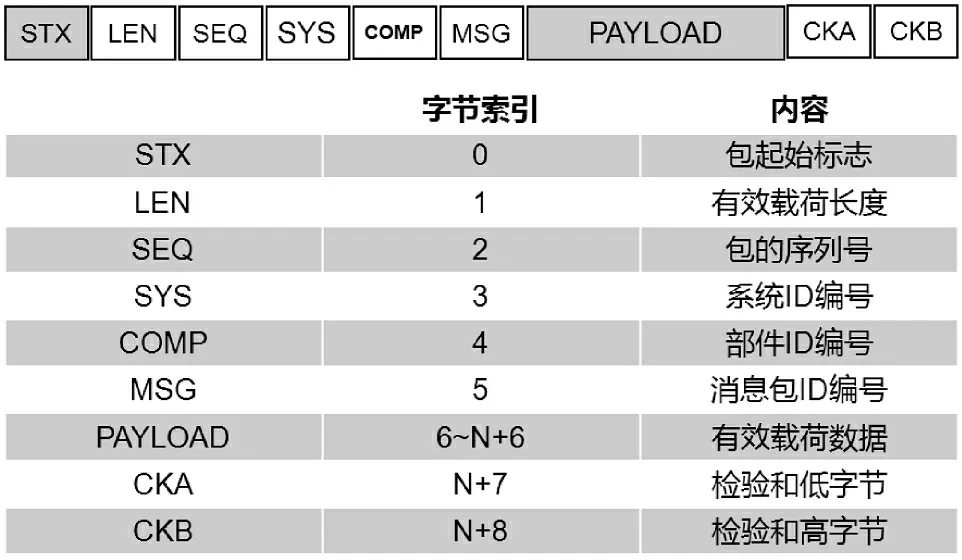
图2 Mavlink 协议格式示意图
2.2 无人机集群加密抗干扰算法
目前比较常用的加密算法包括RSA,DSA 加密算法[23-24],其中,RSA 加密算法选择两个大素数p和q,计算p 和q 的乘积n,计算p-1 和q-1 的乘积,选择一个与p-1 和q-1 乘积互质的数e,计算出d,e 和d 分别作为其公钥和私钥,正向加密过程中,通过给定两个素数p 和q 很容易相乘得到n,但是反向解密验证过程中总是难以对n 进行因式分解。而本文设计的椭圆矩阵算法有效地避免这一缺陷,可以通过任意一点M 是否满足椭圆准线方程来反向求解私钥。具体过程如下。
2.2.1 选择公钥
如图3 所示,根据椭圆标准方程,椭圆长轴在Y轴上,椭圆短轴在X 轴上,则|P1P3|=2b,|P2P3|=2a;其中,将P1,P2,P3,P4 相连组成向量P1P2,P2P3,P3P4,P4P1,这些向量组成一个环路。

图3 椭圆标准方程示意图
通过坐标P1(0,b),P2(-a,0),P3(0,-b),P4(a,0)构建直线方程,进而将直线方程矩阵化得到,并根据该矩阵创建新矩阵,且为数据结构中的对称矩阵,空余通过0 填充,创建后的矩阵再继续转化,利用稀疏矩阵存储,具体矩阵转化过程如式(1)所示。

最后通过对稀疏矩阵采用一维表进行存储,在求取公钥的过程中,除0 外,偶数位做叠加处理,奇数位做叠乘处理,即如式(2)所示。
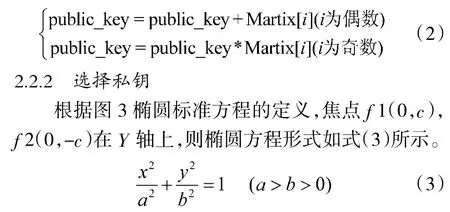
根据椭圆的特性,得到椭圆上任意一点M,到焦点f 1,f 2 的距离|Mf 1|+|Mf 2|是一个常数。此时连接Mf 1 和Mf 2,很容易得到椭圆标准方程式(3)从而得到椭圆的准线方程。通过椭圆的准线方程,可以得知准线方程和椭圆相切于点P1,P2,P3,P4并可以很容易地得到这4 个点的坐标分别为(0,b),(0,-b),(a,0),(-a,0),从而有效规避根据公钥反向求解a,b 参数的高难度问题,更加简单有效地完成解密验证。
2.2.3 数字签名
区块链中常用MDS,RSA,HASH 来完成数字签名安全认证,本文提出的模型采用了上述提到的椭圆矩阵算法来实现区块的数字签名。数字签名具体过程如图4 所示。
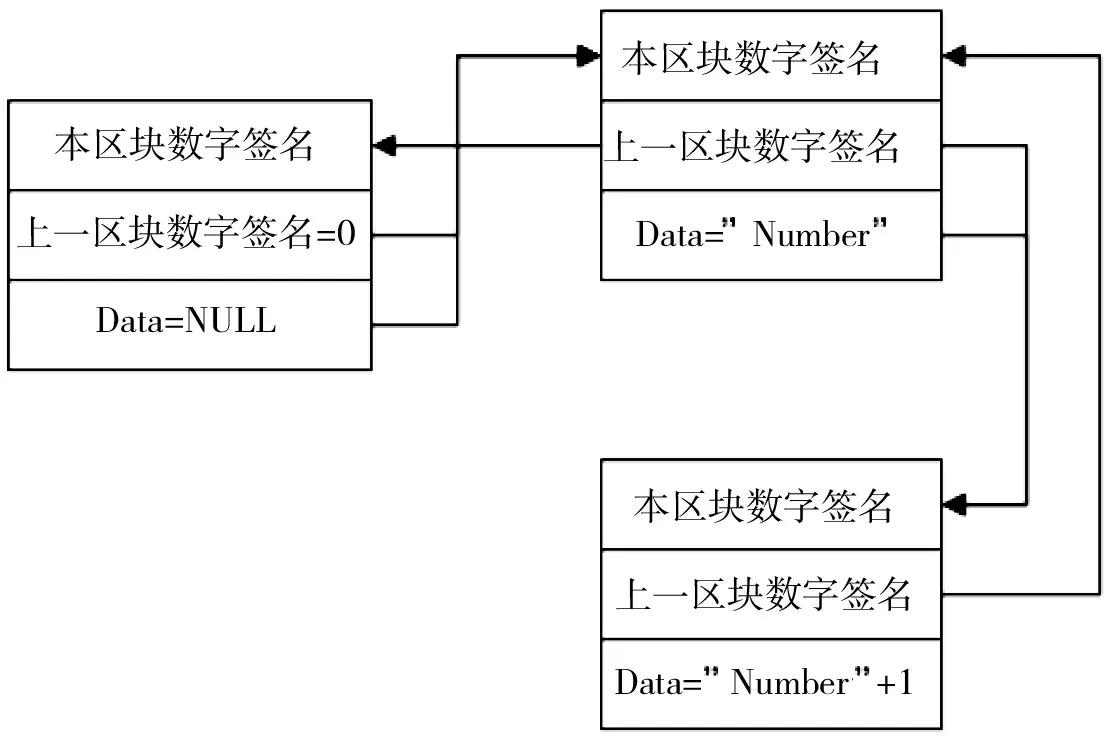
图4 数字签名流程示意图
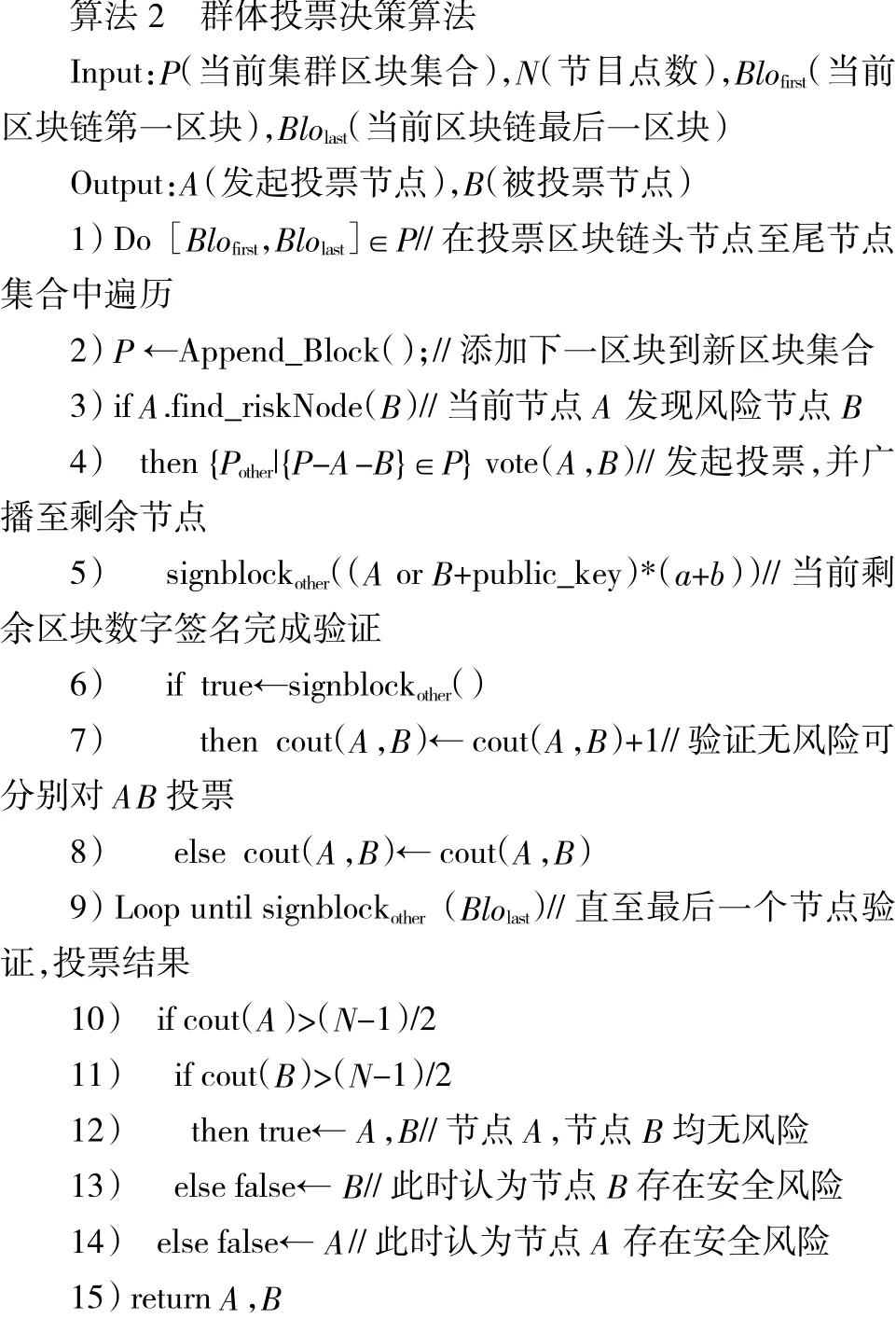
其中,本区块数字签名=(上一区块数字签名+public_key)*(a+b),利用数字签名可以有效地保证无人机集群通信网络中的数据传输安全。具体椭圆矩阵加密完成数字签名算法如下。

2.3 无人机集群共识抗干扰算法
基于区块链无人机集群抗干扰通信网络的搭建,通过群体投票决策改进访问控制逻辑[25-26],可以一定程度保证无法被随意恶意篡改节点或伪造节点接入网络。本文主要通过群体投票决策来实现集群网络抗干扰的性能,参照算法流程图如图5 所示。
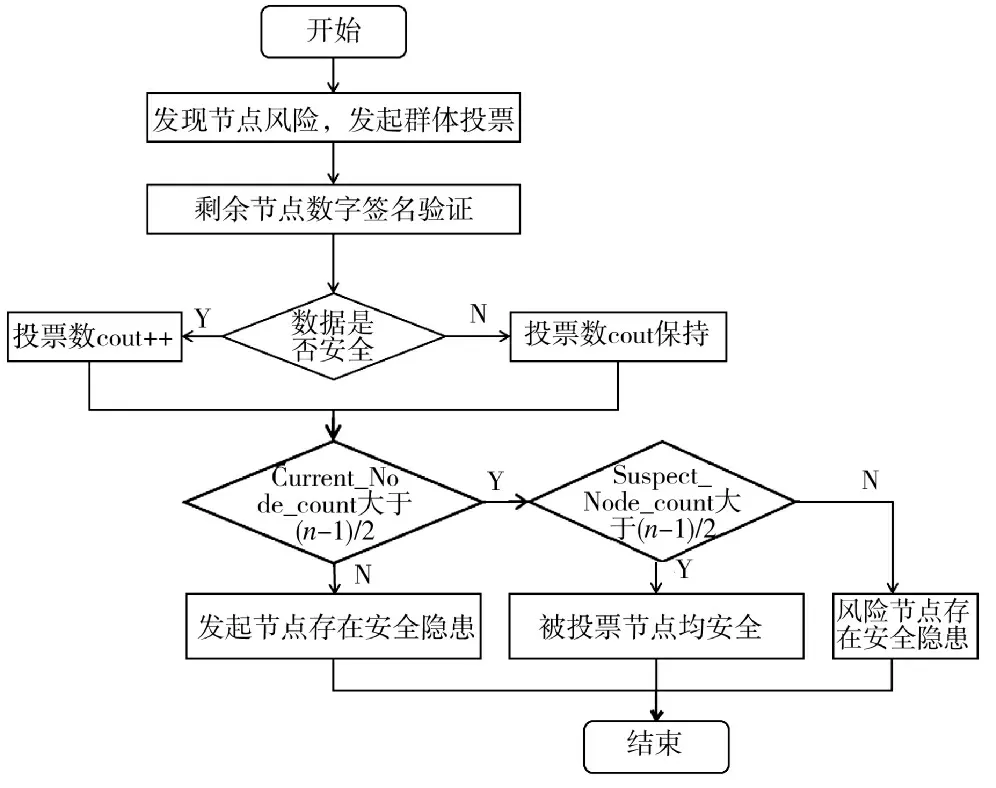
图5 群体投票决策算法流程图
1)根据无人机集群抗干扰通信网络的设计,当一个无人机节点在任务过程中发现可疑目标时,访问控制模块将通过节点风险感知节点被恶意攻击的风险,针对此类非合作性干扰,则发起群体决策。
群体投票决策过程中,发现节点风险后,该节点发起两个投票决策,分别为投票01 和投票02,投票01 主要为了保证发现可疑节点的本身节点不存在安全隐患,其中记录的内容包括,当前节点对象地址Current_Node_address,当前节点所需通信的飞行数据和作战指令Current_Node_data,以及投票数Current_Node_count。投票02 中记录的内容包括,可疑节点对象地址Suspect_Node_address,可疑节点所需通信的飞行数据和作战指令Suspect_Node_data,以及投票数Suspect_Node_count。将投票01 和投票02 通过网络进行广播至剩余无人机节点。
2)无人机将投票信息广播至网络内其他无人机,网络内的无人机进行投票操作;网络中的无人机收到广播的投票内容后,将其写入各自的区块中并记录在行为数据库。同时对投票01 和投票02 的内容通过椭圆矩阵加密算法,对被投票节点的数据进行解密验证,并数字签名Sign(Node_address,Node_key)。将数字签名结果再次通过网络进行广播至剩余无人机节点,同时投票数对应增加。
对应投票01 中,椭圆矩阵提供的加密算法Node_key 对Current_Node_data 进行验证,若验证表明Current_Node 节点不存在安全隐患,无恶意篡改的问题,则将Current_Node_count 进行加一操作。
对应投票02 中,椭圆矩阵提供的加密算法Node_key 对Suspect_Node_data 进行验证,若验证表明Current_Node 节点不存在安全隐患,无恶意篡改的问题,则将Suspect_Node_count 进行加一操作。
3)当最终回复的节点完成投票信息验证后开始计算投票结果,并将投票结果和所需传递的数据信息写入区块链中,保存在行为数据库,以供历史查询验证。
Current_Node_coun 且Suspect_Node_count 的值大于(n-1)/2 时(其中n 为区块链中所有节点数),可以认为投票01 和投票02 对应对象节点通信数据真实有效,否则,当投票01 中Current_Node_count小于(n-1)/2,认为投票01 对应对象节点通信数据为伪造数据,与此同时,当投票01 中Current_Node_count 大于(n-1)/2,开始对投票02 进行验证。
3 实验结果
3.1 实验环境
为了验证本文提出模型的可行性,基于无人机通信协议Mavlink 框架,根据区块链搭建思路,利用链表结构创建一个数据通信区块链[27]并通过改进Mavlink 协议进行广播,部署在无人机集群网络上。实验部署6 个节点,模拟6 架相互独立的无人机,对应标号1-6。同时部署1 个地面站节点,实验开始,由地面站发送数据给1 号节点无人机,并开始生成创世区块,在进行数据通信和抗干扰实验前,率先完成区块链创建。实验中,实验环境及参数如表1 所示。
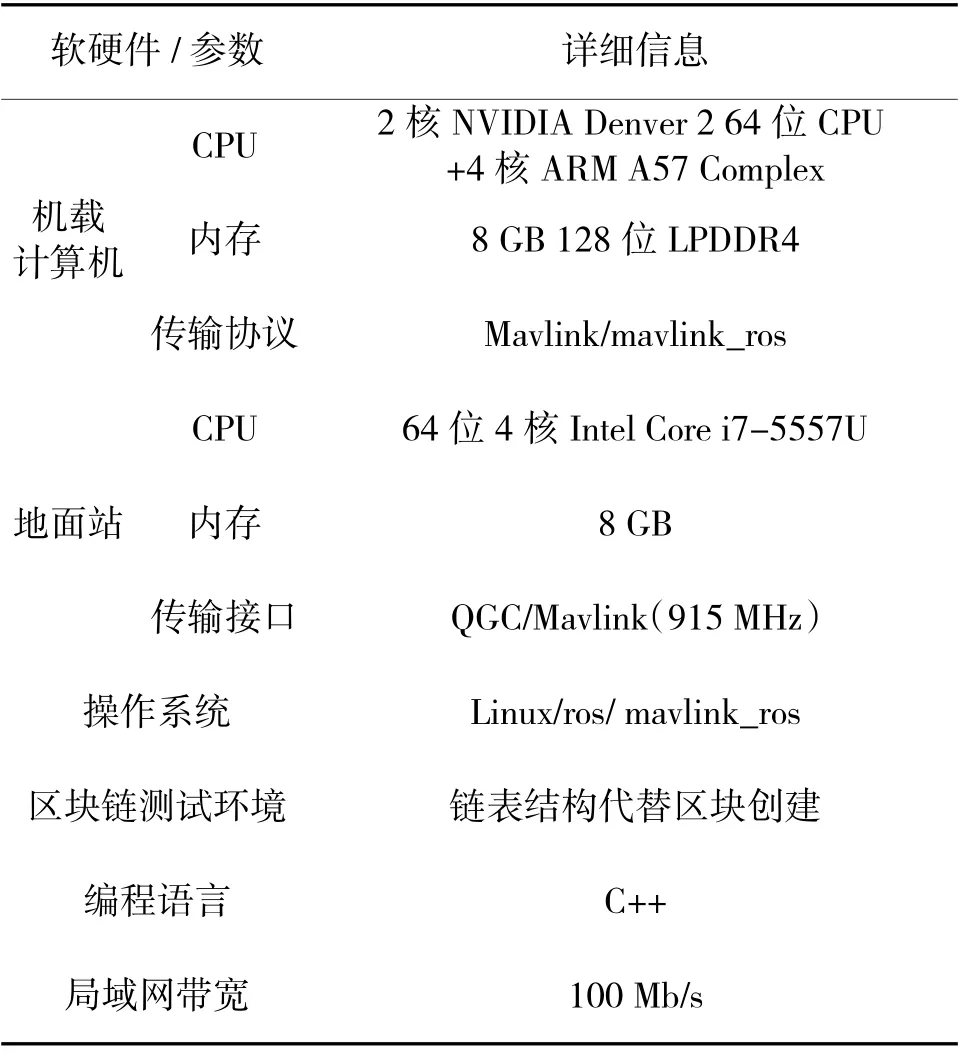
表1 实验环境
3.2 模型性能分析与实验
3.2.1 数据传输效率分析
在数据传输效率验证实验中,比较RSA 加密算法与椭圆矩阵加密算法,选择相对更为安全的数据加密算法来改进Mavlink 无人机通信协议中原有的校验方式,从而通过实验分析改进前后网络中节点间数据传输时延大小。
表2 对于RSA 加密算法和椭圆矩阵加密算法公私钥的生成进行了实验对比,通过观察发现,二者在时间复杂度上基本保持一致,但是,椭圆矩阵加密算法在相同时间复杂度内生成了20 位的公钥,及与之对应的私钥。因此,椭圆矩阵加密算法安全性相对更适于取代Mavlink 原有通信协议校验方式。
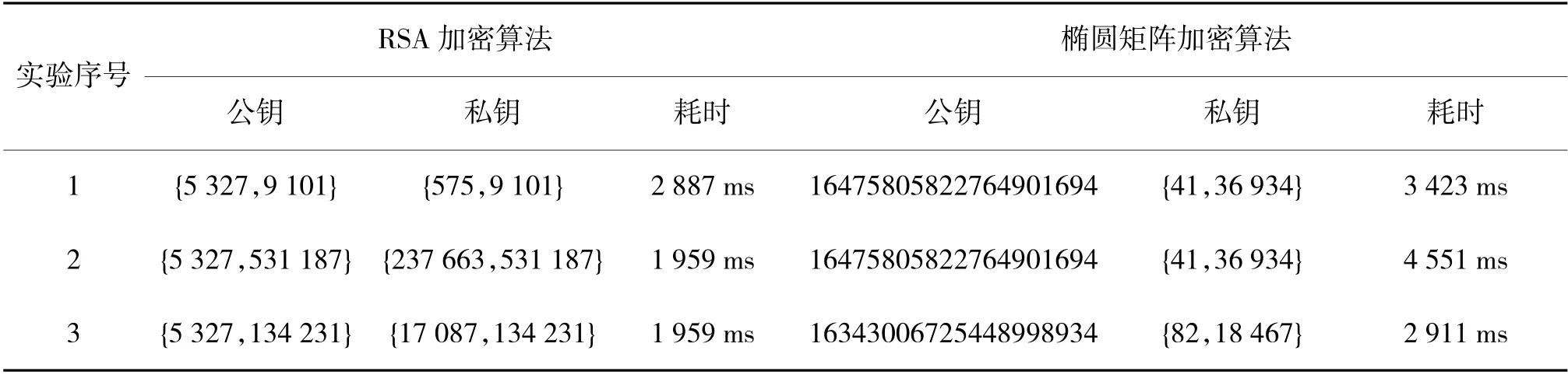
表2 RSA 加密与椭圆矩阵加密算法比较
将Mavlink 协议消息包进行扩展改进,取代原有CRC 校验位。Mavlink 协议改进前后无人机集群网络相邻节点间发送90 个包含不等长数据帧的消息包,其中端到端传输时延对比如图6 所示。
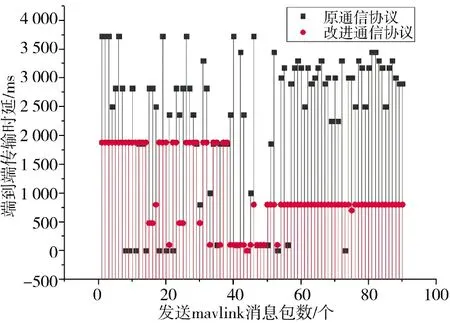
图6 相邻节点端到端通信时延对比
由于原Mavlink 协议通过通信双方完成CRC校验才可以进行消息包接收,对于不同字节长度的数据帧,CRC 校验所需时间不同,产生的通信时延也会有所差异。而利用椭圆矩阵加密算法扩展原有协议发送格式,取消CRC 校验机制,通过独立于传输协议之外的公私钥数字签名来完成通信双方验证,通信时延仅与加密算法有关,与传输数据长度无关。通过图6 观察到,原Mavlink 协议通信时延明显高于改进后协议通信时延。实验表明利用椭圆矩阵算法改进Mavlink 协议将具备更好的实时性。而无人机集群通信对于战场实时性的需求是迫切的,此方法不仅保证数据安全传输,而且保证通信实时性的需求。
3.2.2 网络可生存性分析
在群体投票决策算法实验中,在数据传输效率实验的基础上,利用改进后Mavlink 通信协议在群体投票决策过程中各节点间进行广播。
实验将3 号节点作为伪节点,其数字签名无法通过安全验证,利用群体投票决策算法,4 号节点在进行数字签名验证时,发现伪节点风险,分别对节点4 和节点3 发起投票。实验统计4 号节点无安全风险投票数为5,3 号节点存在安全风险投票数为6,则最终通过群体投票决策算法决策,认为3 号节点为伪节点,同时传输的数据不受影响,继续叠加操作。
实验进而将所模拟的6 架无人机,人为加入非合作干扰(包括电磁干扰导致通信链中节点丢失以及伪节点非法接入数据链)进行无人机集群通信网络生存时间对比,测试具体如图7 所示。
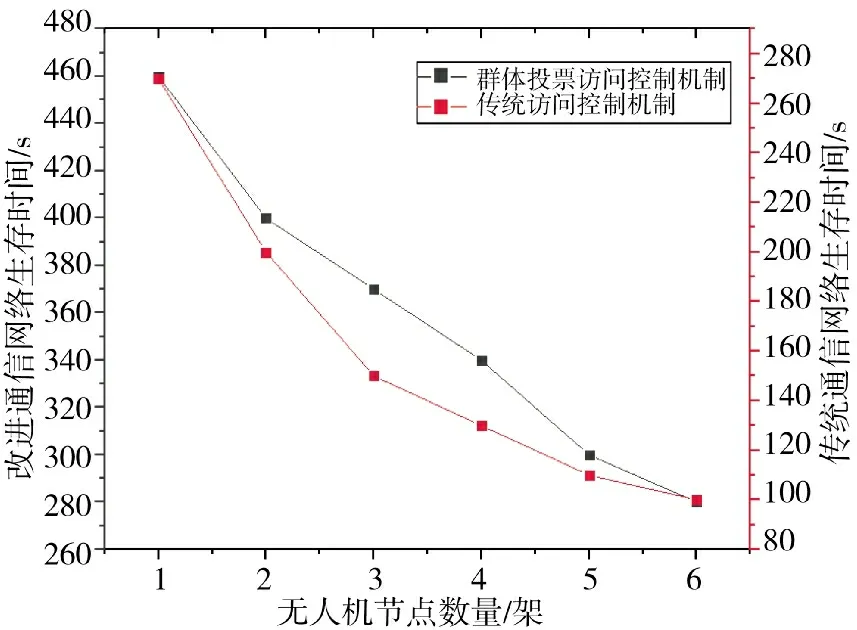
图7 不同访问控制机制下网络生存时间对比

表3 群体投票决策算法决策伪节点
通过实验验证,如图7 所示,在给定干扰的情况下,无人机集群通信网络的生存时间会随着无人机集群通信节点的扩增而衰减,对此,选择合适数量的无人机搭建集群通信网络至关重要。但总体上,利用群体投票决策访问控制机制的网络生存时间明显高于未作任何改进的访问控制机制。因此,群体投票决策算法作为一种抗干扰措施,也可以很好地应用于无人机集群通信抗干扰环境中。
4 结论
本文针对无人机集群组网通信过程中容易受到周围环境或敌方非合作性干扰的问题,提出了基于区块链的无人机集群抗干扰通信模型。其工作创新点如下:
1)分析了如何通过制定相应的椭圆矩阵加密算法实现区块数字签名来替代原有Mavlink 无人机通信协议校验方式。
2)探索了如何通过群体投票决策机制改进共识算法来防止非合作干扰通过篡改节点或伪造节点接入网络。
通过仿真分析验证,本文所提出的无人机集群网络通信模型能够有效提高无人机集群网络中各机载终端在信息共享过程的机密性,降低网络通信时延,同时对提高战场通信网络抗干扰可生存性和维护数据链路安全具有现实意义,为相关方向的研究和装备研制提供一定的参考。
