延时和切换拓扑下多智能体系统动态事件触发一致性*
2022-03-08周琦轩
陈 侠,周琦轩
(沈阳航空航天大学,沈阳 110136)
0 引言
近年来,多智能体系统逐渐成为人工智能领域的一项重要内容。多智能体系统可以对现实中的复杂系统进行分析、设计和建模,从而将一个大规模的复杂任务由多个简单的智能体完成,达到节约资源,节省成本的目的。随着研究的深入多智能体系统在越来越多的领域展现其应用价值,例如无人机编队控制、传感器网络等,其中,多智能体系统一致性问题成为热点的研究课题之一。多智能体系统一致性问题指系统在任意初始状态下,智能体之间利用一致性控制协议进行信息交互,最终使所有智能体的状态能够达到一致。一致性控制协议就是智能体之间相互作用的具体规则。陈珂熙等设计了一种一致性控制协议,解决了多智能体系统领导-跟随一致性问题。
通信时滞在实际应用中是常见问题,受网络延时影响,智能体之间不能及时进行信息传递或智能体需要在相关计算上花费时间都会导致时间延时。Hu 等研究仅含有通信时滞的非线性多智能体H一致性问题。本文考虑了延时对系统的影响。
为了实现多智能体一致,各智能体间需不断进行局部信息交换。而在实际情况下多智能体之间通信拓扑经常会受到外部干扰而发生变化,这对控制系统的信息传递产生极大威胁,使智能体不能达到一致。切换拓扑即由于临时通信丢失或智能体布局的改变而导致拓扑发生变化。周绍磊等提出了一种一致性控制方法,实现了有向切换拓扑多智能体系统带领导者的一致性追踪问题。
随着数字化网络的不断发展,传统的触发方式并不能有效地节约网络资源。例如时间触发机制周期性地进行状态采样和信息传输的采样方式有一定的局限性。学者们提出用事件触发机制,通过预先设置触发条件来决定数据是否被传输,这样可以减少不必要的采样以节约通信资源。申通等为解决自主车辆队列协同控制问题,使用事件触发机制来减少控制中冗杂信息的传输。值得注意的是,事件触发的触发条件仅受智能体当前状态和误差的影响,并没有考虑以前的状态和误差对触发规则的影响。本文在事件触发机制的基础上,通过引入一个动态变量,提出了动态事件触发机制。使触发条件不仅受智能体当前状态和误差的影响,还受智能体以前的状态和误差影响。该动态变量是动态事件触发的发动机,其能够动态地对触发规则进行改变,相比于事件触发更合理地减少采样次数,有效节约了网络资源。目前,关于动态事件触发也引起了有关学者的重视,王世等研究了多智能体系统事件触发一致性控制算法。但该系统考虑的数学模型比较简单,也没有考虑延时和不确定切换拓扑对控制系统的影响。
本文研究了具有延时和不确定切换拓扑的多智能体系统动态事件触发一致性问题。既使用了动态事件触发机制有效地节约了网络资源,又考虑了延时和切换拓扑对多智能体一致性的影响。最后基于Lyapunov 稳定性理论、线性矩阵不等式和代数图论,证明了所提出的动态事件触发控制策略能有效地实现多智能体系统一致性,并且不存在Zeno 行为。
1 图论

2 问题描述
2.1 一致性问题
2.2 静态事件触发机制

2.3 动态事件触发机制
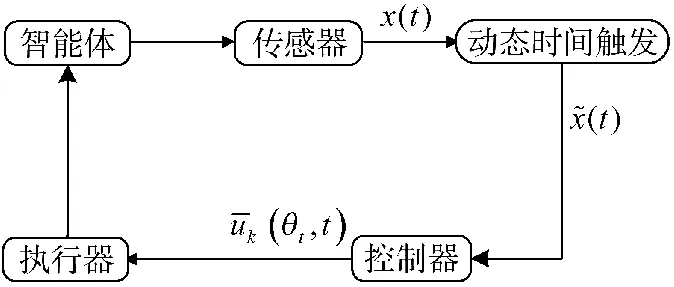
图1 动态事件触发的多智能体系统控制框图
2.4 转换多智能体系统
根据文献[19],为了解决多智能体一致性问题采用树型转换法通过引入不一致的新变量,将一致性问题转化为闭环系统稳定性问题。
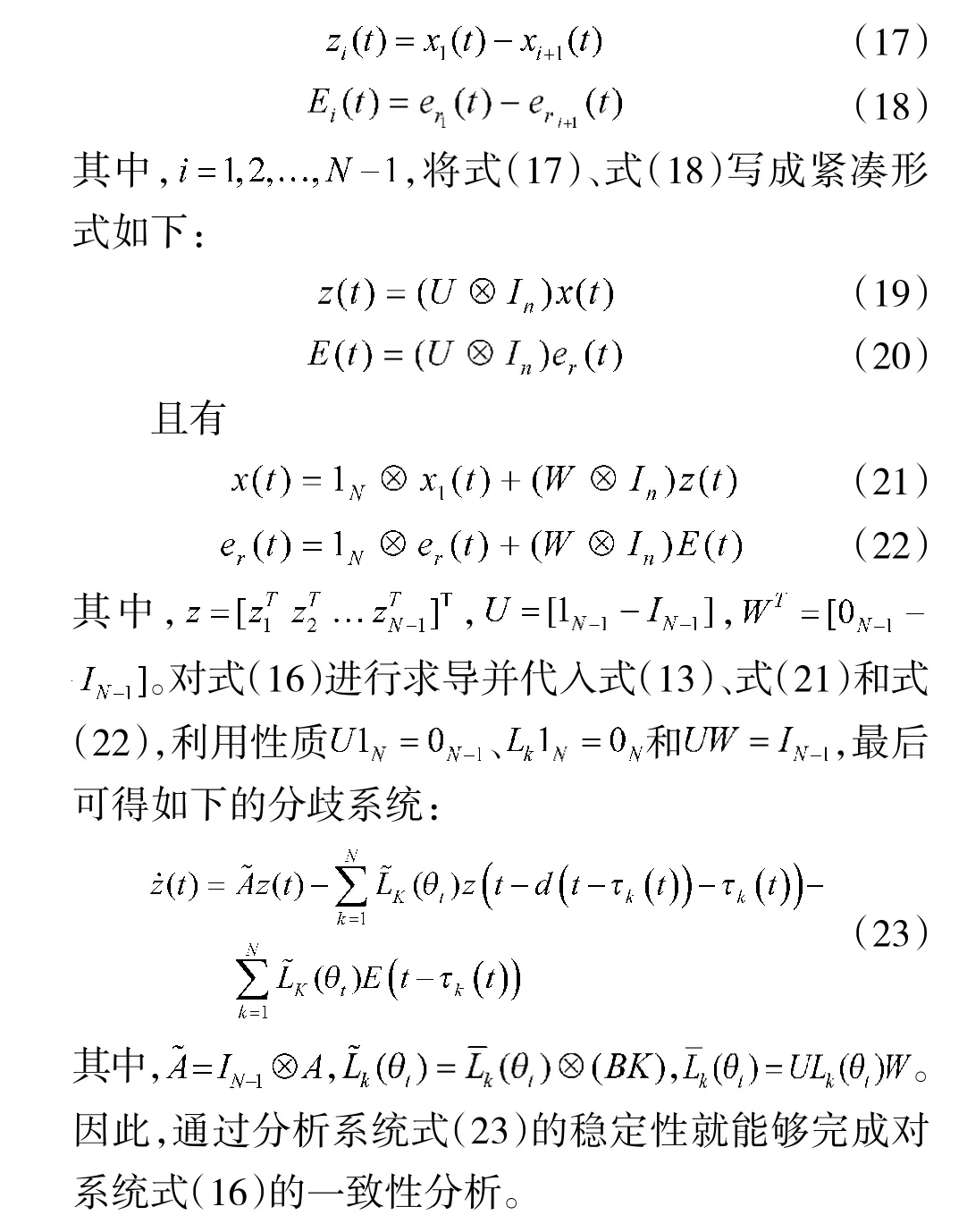
3 一致性分析
讨论多智能体系统式(23)稳定性,若下列不等式成立,则闭环多智能体系统就在均方意义下实现一致性:
4 数值仿真
此节通过MATLAB 仿真证明了本文所提出的方法的可行性。仿真例子考虑了包含4 个智能体的多智能体系统,系统的模型图如图2 所示。
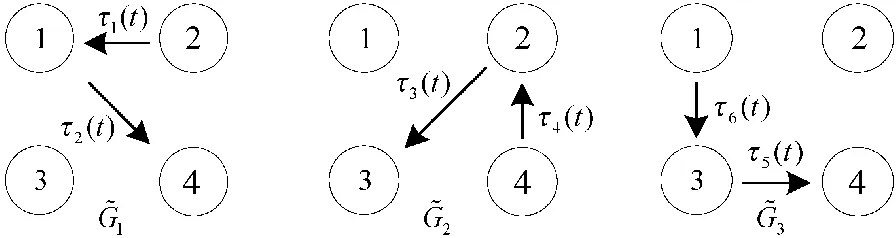
图2 具有3 种拓扑的多智能体系统模型图
因此,可得Laplacians 矩阵如下:
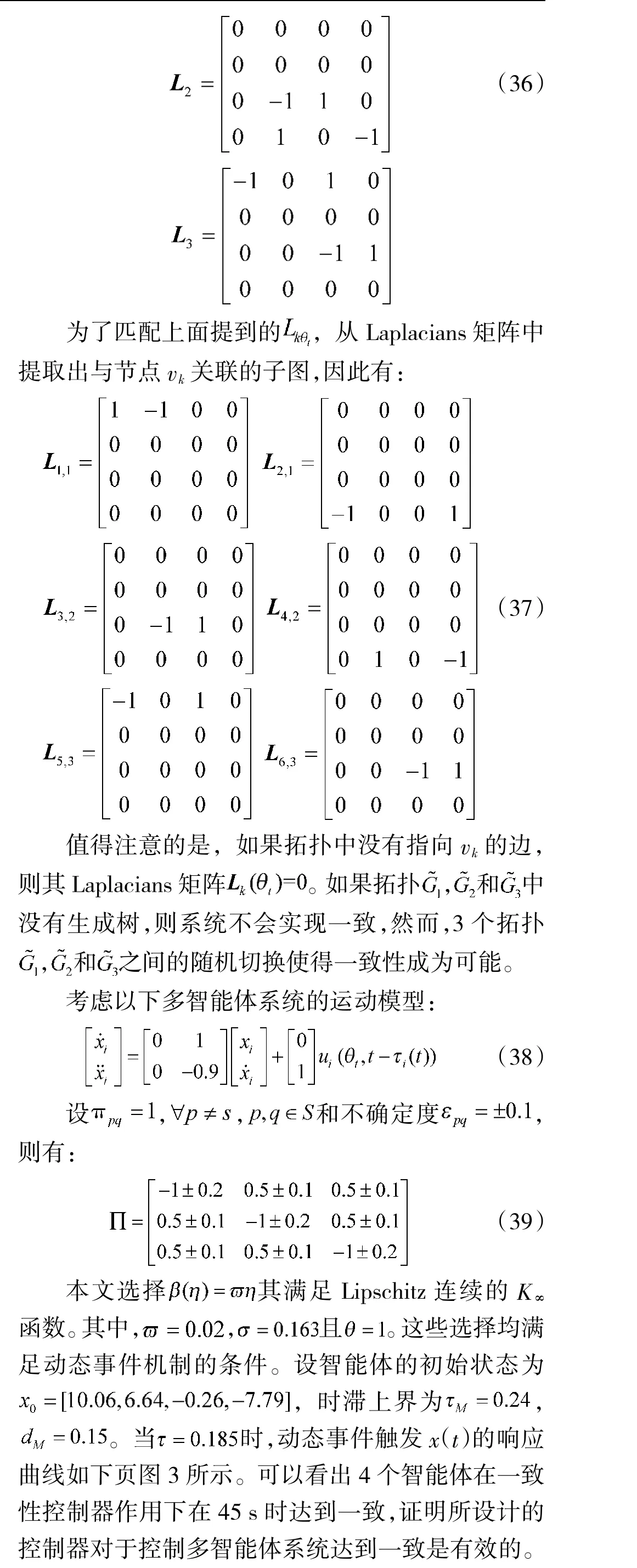
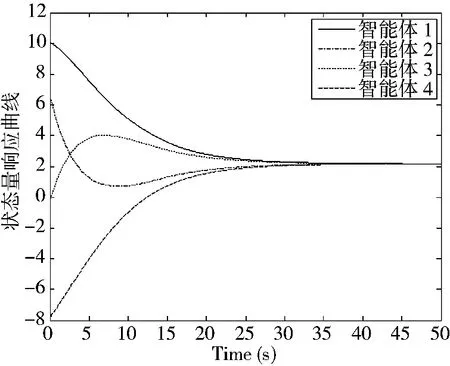
图3 智能体状态的响应曲线
图5 和图6 分别是静态事件触发和动态事件触发的触发时间和区间。在相同的触发时间里静态事件触发机制在50 s 内触发42 次,而动态事件触发机制在50 s 内触发30 次。在保证系统稳定的前提下,可以看出动态事件触发出区间更长且能够减少触发次数并节约网络资源。
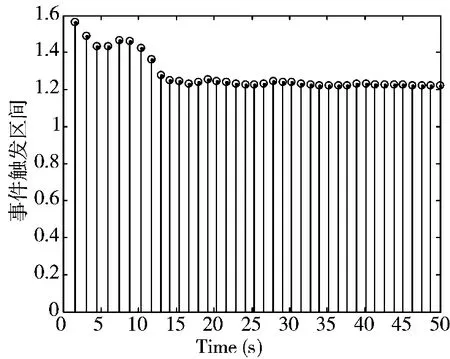
图5 事件触发时间和区间
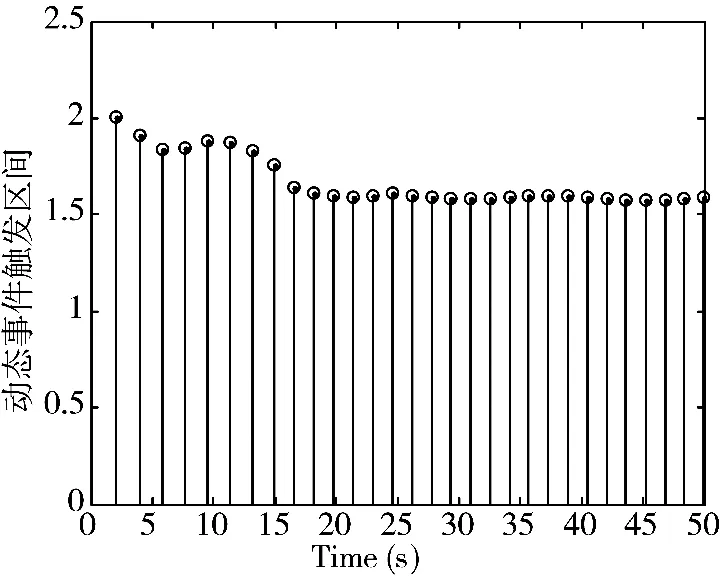
图6 动态事件触发时间和区间
表1 给出了两种采样机制每次执行时间的平均值。可以看出,动态事件触发机制(DETM)的平均执行时间明显大于静态事件触发机制。σ 的值越小,动态事件触发机制相比于静态事件触发的增益越大。
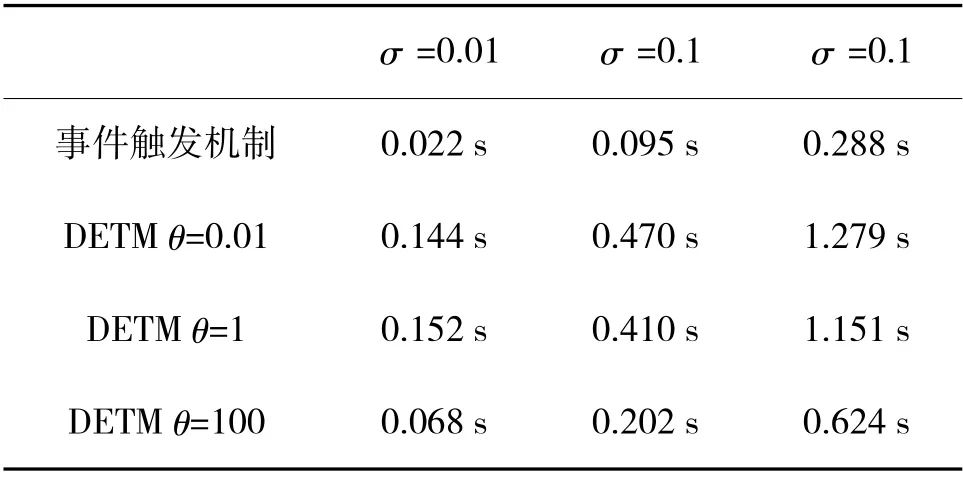
表1 两种机制平均执行时间对比
图4 是动态事件触发误差的欧几里得范数变化,当触发条件被满足误差返回到0。图7 表示3 种拓扑之间的切换。当θ=1 时多智能体系统在第1 种拓扑下运行。3 种拓扑之间切换的概率是不确定的,本文的方法可以分析系统在不确定性和估计性条件下的一致性。
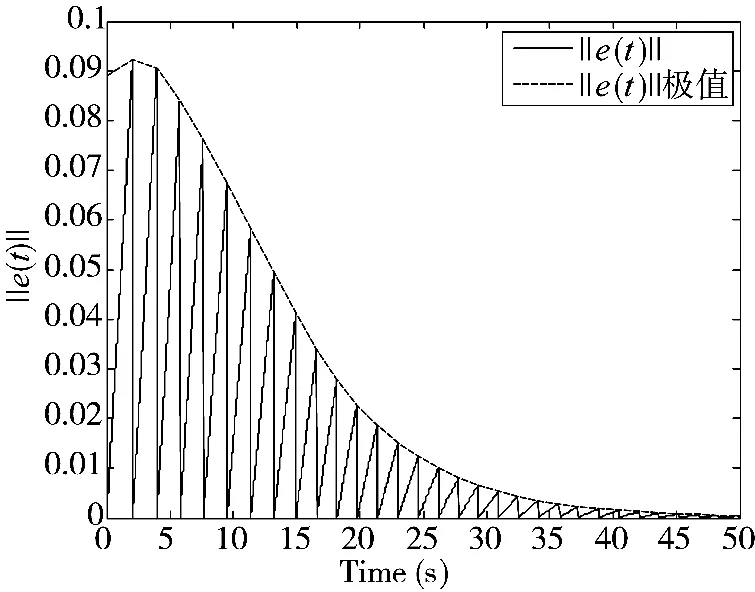
图4 误差的欧几里得范数变化
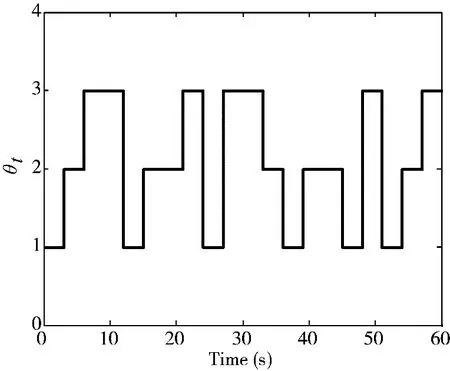
图7 3 个拓扑的之间的切换
上述仿真结果表明,本文提出的动态事件触发多智能体一致性算法,可以应用于具有时变时滞和切换拓扑的一般线性动态多智能体系统中。基于以上分析可以看出,多智能体系统最后实现了渐近稳定性和一致性。因此,该方法可以灵活地保证系统的一致性。
5 结论
本文研究了具有延时和切换拓扑的一般线性多智能体系统动态事件触发一致性问题。在实际系统中,智能体的通信带宽有限,动态事件触发通过引入动态变量,能够动态地对触发规则进行改变,合理地减少采样次数,节约了网络资源。并且考虑了延时和切换拓扑对多智能体一致性的影响。最后基于李雅普诺夫稳定性理论和线性矩阵不等式理论,给出了动态事件触发控制下多智能体系统在均方意义上实现一致性的充分条件。最后,通过数值仿真对本方法的有效性进行了验证。
