基于改进的A*算法机器人导航路径研究
2022-03-07胡广雪郑亚清韩洋祺
胡广雪 郑亚清 韩洋祺


摘要:针对移动机器人在不同的工作场景不确定性,设计了将相邻节点优先级分组与Floyd-Warshall算法相结合路径规划研究方法。首先,对全局规划A* 算法相邻节点优先级分组。其次,综合环境和路径的情况以全局路径的拐点为局部目标点,采用改进的Floyd-Warshall算法进行局部路径规划,从而使规划路径寻路时间及转折点次数优于A*算法。最后进行仿真验证,仿真结果表明:该算法有效解决复杂移动环境的路径规划的问题,提高了机器人导航路径规划的准确性和鲁棒性。
关键词:移动机器人;改进的A*算法;路径规划
1.引言
随着智能制造技术的不断发展,机器人在在野外探测、工业流水线制造、物流输送等多个领域广泛应用。其中,定位和导航系统是研究机器人的核心问题。智能移动机器人系统主要由环境感知、环境逻辑决策及辅助路径规划系统组成,且导航路径规划是移动机器人性能衡量的重要指标。目前也有一些其他导航定位方法,一些学者采用人工路标定位,但此类定位方法需要提前布置导航的室内场景[1]。[2]通过改进A* 算法的关键节点实现了静态移动环境下的路径规划。[3-6]根据已知和未知环境信息进行局部和全局路径的规划。[7]提出了基于二次规划改进的A*算法,但并未考虑移动机器人的体积和偏转角,实际应用不强。[8]提出跳过节点搜索策略,减少了计算过程中访问节点数,加快程序的运行速度,但路径中转折点仍比较多。采用改进蚁群算法搜索全局路径点,但搜索节点数据量太大。提高控制程序运算速度,但对行驶路径的弯曲程度没有考虑。
针对传统算法计算量大,由于地下车库和不同工作厂房复杂不确定性,为了提高智能移动机器人在位置环境中精确性,本文采用改进的A*算法进行智能移动机器人导航路径规划,为实现高效率的工作提供实现基础。
假设智能移动机器人M在有限个障碍物的二维栅格平面区域Y内移动,以Y的左下角为坐标原点,以水平方向为横坐标x轴,垂直方向为纵坐标y轴,建立如图1直角坐标系xOy。其中,xmax、ymax分别为横纵坐标轴方向上的最大值。以移动机器人的步长s对坐标区域进行划分行和列的栅格数。
每个栅格有相应的坐标值与其一一对应,将其序号集定义为![]() ,以坐标区域的左上角为原点,由左向右、自上至下,对二维平面区域Y进行编号,坐标与序号之间的关系为
,以坐标区域的左上角为原点,由左向右、自上至下,对二维平面区域Y进行编号,坐标与序号之间的关系为
2.改进的A*算法
由于传统的A* 算法存在运行求解速度较慢,当移动机器人从栅格A移动到栅格B时,考虑到移动机器人有一定的轮廓体积,因此,在红点处可能会发生碰撞,从而造成移动机器人损坏。对此,本文通过对传统的A*算法节点的扩展顺序进行改进,如图2所示。设移动机器人当前运动环境节点为O,周围相邻节点分别为 A、B、C、D、E、S、W、N。以便降低在实际移动过程中与障碍物发生碰撞的概率,相邻两个节点优先分组。
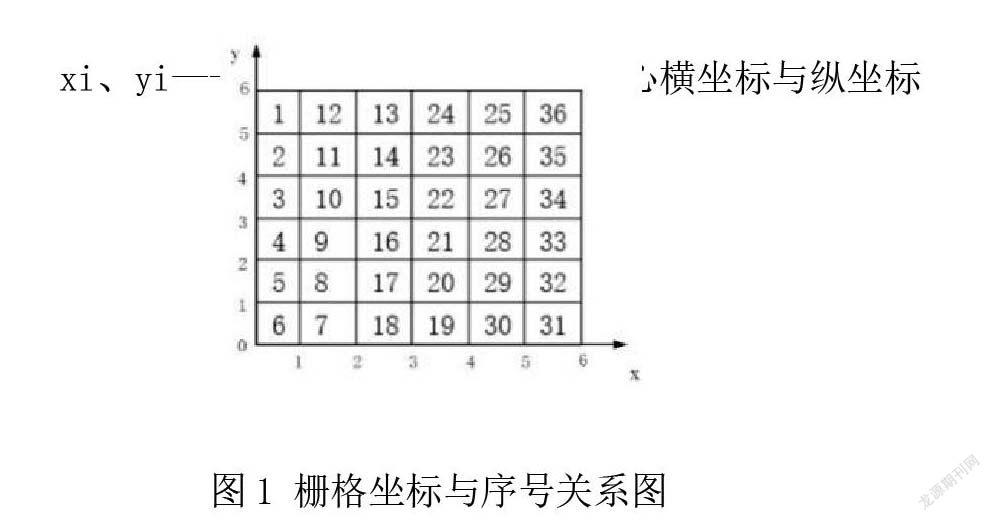
上述方法对A*算法子节点的选择优化,可以提高移动机器人规划路径的安全性,但路径规划过程中转折次数较多,行驶路线的不平滑难度增加很多。针对上述问题问题,在优化选择子节点的基础上,将双向平滑理念引入到Floyd-Warshall 算法中对 A* 算法进行改进,通过建立两点之间路径长度的二维数组来计算最短路径。将双向平滑理念引入到 Floyd-Warshall 算法中,即在优化正向路径的基础上,加入目标点 T 到起始点 K 的反向优化。具体改进步骤如图3 所示。
针对改进的A*算法优化路径算法,主要从以下步骤进行仿真验证:对路径中同一直线上的中间冗余节点进行删除,仅保留起始点K、拐点和目标点T。删除冗余节点后的移动路径为 K→p1→p2→p3→T。从起点K开始,在保留节点pi、pj之间每q步取一节点,判断取的节点与上一路径节点之间是否存在障碍物。若有障碍物,则当前路径节点不变;若无障碍物,则由程序计算障碍物与节点pi、pj连线的距离。
根据栅格的大小将规划的路径安全距离定义为d,当d>dOB时,该路径可以进行选择,否则该路径不可选,加入安全距离后的路径为K→p33→T。
3.仿真结果验证
为验证上述理论分析及改进 A* 算法规划路径的有效性,在 Matlab 2010a实验平台下分别对传统的 A*算法。其中 d = 0.8 m,q = 0.1 m,栅格大小为1 m。黑色栅格为障碍物区域,占地图总面积为19.5%,灰色栅格为遍历的节点区域,两组栅格地图路徑规划结果如图4所示。
由仿真的路径曲线可得,传统A*算法所规划的移动路径存在斜穿障碍物顶点的不足,适应性较差。改进后的A*算法在设定机器人行驶的安全距离后,规划路径与障碍物的距离始终大于d,从而避免了移动机器人距障碍物较近而发生碰撞的情况,提高了移动机器人路径行驶的安全性。基于双向FloydWarshall改进的A*算法折点的数量较传统A*算法有所减少,其规划的移动路径曲线更加平滑,在实际应用中,有利于减少移动机器人运动过程中的航向角,有效提高移动机器人运动的平稳性和工作效率,具有一定的实用价值。
4.结论
(1)为提高A*算法的运行效率及移动机器人规划路径的安全性,提出对子节点的扩展的顺序进行优化选择,将8个领域节点划分为高级组和一般组,缩短寻优路径的时间,避免规划路径存在斜穿障碍物顶点问题。
(2)针对传统的A*算法搜索路径转折点个数多、路径曲线不平滑等不足,采用 Floyd-Warshall算法对路径曲线进行双向平滑处理,从而减少航向角的次数,改善行驶路径的质量。
(3)采用Floyd-Warshall算法改进后的的A*算法,符合移动机器人的运动控制,具有实际的使用价值。
参考文献:
[1]黄露.基于人工路标的室内机器人导航方法研究与实现[D].中国科学技术大学,2017.
[2]王帅军,胡立坤,王一飞.基于改进D*算法的室内移动机器人路径规划[J]. 计算机工程与设计,2020,41(4):7.
[3]Baoye, Song, Zidong, et al. On Global Smooth Path Planning for Mobile Robots using a Novel Multimodal Delayed PSO Algorithm[J]. Cognitive Computation, 2017, 9(1):5–17.
[4]Chen H ,Fei J . UAV Path Planning Based on Particle Swarm Optimization with Global Best Path Competition[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2017, 32(1).
[5]Golda A F ,Aridha S , Elakkiya D . Algorithmic agent for effective mobile robot navigation in an unknown environment[C]// Intelligent Agent & Multi-Agent Systems, 2009. IAMA 2009. International Conference on. IEEE, 2009.
[6]Mohtasham S K , Abbas S . Adaptive Path Planning for Navigation and Sensing of Micro Aerial Vehicles. 2016.
[7]楊璐, 汪博涵, 张雪洁. 基于A*算法的AGV路径规划研究[J]. 公路与汽运, 2014.
[8]Pal A , Tiwari R , Shukla A . Modified A* Algorithm for Mobile Robot Path Planning[M]. Springer Berlin Heidelberg, 2012.
