三相四桥臂变流器调制方法综述
2022-03-06郑柳鹏张志
郑柳鹏 张志
(1.东莞理工学院 电子工程与智能化学院,广东东莞 523808;2.广东工业大学 自动化学院,广东广州 510006)
近年来,随着传统石油、煤等化石能源的短缺和环境污染等问题日益严重,以太阳能、风能为代表的新能源已经成为全球的研究热点[1]。为了满足用电设备对电能质量的要求,通常需要通过变流器对电源系统的输出电压和电流的幅值、频率、相位等特性进行调整改善[2]。
传统的三相三线制逆变器拓扑图如图1所示,由于技术方案成熟和优异的性能,被广泛应用于交流传动、无功补偿等领域。但在某些特定的电源系统应用场合(如不间断电源、航天航空电源),通常需要三相变流器具有同时处理平衡和不平衡、线性和非线性工况的能力[3]。传统的三相三线制变流器由于没有零序电流通路,在带不对称和非线性负载时,为使负载中性点电流为零,其对输出电压的幅度、相位和总谐波失真等的精确调节就很难得到保证[4]。
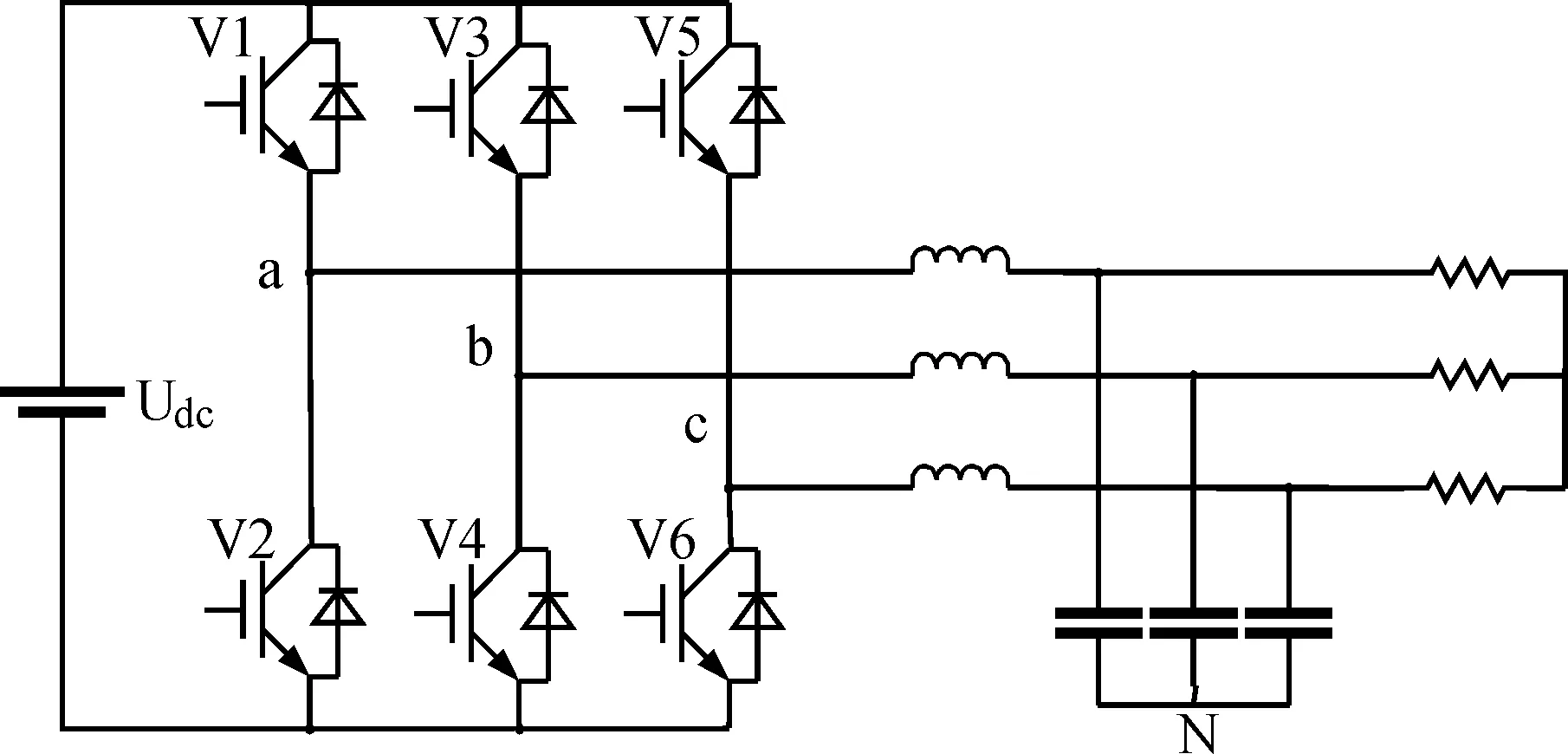
图1 三相三线制逆变器拓扑图
带Δ/Y型变压器的三相逆变器[5]和带中点形成变压器的三相逆变器[6]是较为常见的两种具有带不平衡、非线性负载能力的三相三线制逆变器拓扑,但它们都因带有变压器而使体积、成本大幅增加,所以三相四线制逆变器拓扑被采用。三相四线制逆变器分为分裂电容式三相逆变器[7-9]和三相四桥臂逆变器[10-11]。前者虽然结构比较简单,但是直流侧需要较大的滤波电容,并且存在电容均压问题;而后者增加了一对开关管,虽然控制难度增加,但较前一种,其具有控制灵活、开关频率固定、容错能力强且电压利用率高等优点[12-14]。
两电平三相四桥臂电压型逆变器拓扑结构图如图2所示,其第四桥臂的中点与负载中性点相连,用以控制负载中点电压,从而保证三相输出电压的对称性。
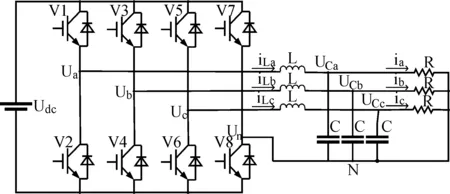
图2 三相四桥臂逆变器拓扑图
第四个桥臂增加的同时,也为三相四桥臂变流器增加了一个自由度,这使得传统三相三线制拓扑的脉冲宽度调制(Pulse Width Modulation,PWM)方式不再适用,为此,许多相关的PWM调制策略应运而生。常见的三相四桥臂调制方法可以分为:三维空间矢量调制方式、正弦脉宽调制方式、离散脉宽调制方式、用于抑制共模电压的无零矢量调制方式以及零共模电压调制方式等。本文将对这几种常见的调制方式进行简单的介绍,然后进行比较。
1 空间矢量脉宽调制
空间矢量脉宽调制(Space Vector PWM,SVPWM)是从如何使电动机获得幅值恒定的圆形磁场的角度出发[15],以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考,通过控制形成脉冲波,进而得到不同的开关状态来使实际的磁通逼近理想磁链圆[16]。假设三相对称正弦电压的表达式如公式(1)所示。

(1)
通过公式(2)可以将三相对称正弦电压合成为一个空间矢量,该空间矢量的运动轨迹是一个圆,它是SVPWM的参考理想磁链圆。这就意味着只要控制合成的空间矢量的轨迹逼近圆,输出的三相电压也就逼近正弦波。
(2)
三相三桥臂变流器是由3对开关管组成,每个桥臂的上下两个开关管是交替导通的,因此该拓扑总共有8种开关状态[17]。若“p”代表上桥臂导通,而“n”代表下桥臂导通,则根据每种开关状态下的空间矢量的值可以绘制出图3所示的电压空间矢量图。

图3 SVPWM的电压空间矢量图
如图3所示,电压空间矢量图在αβ平面上为一个正六边形,它被8个开关矢量分割为六个扇区。空间矢量调制方式是先判断参考电压位于哪一个扇区中,而后通过参考电压相邻的两个非零矢量以及零矢量借以式(3)所示的伏秒平衡方程[18]对其进行合成。
UrefTs=U1T1+U2T2+U0T0,
(3)
其中Ts为开关周期,而T1,T2,T0分别为非零矢量U1,U2和零矢量U0和U7的作用时间。
在文献[19]中,证明了SVPWM的输出的最大的线电压为Udc,即SVPWM的最大电压利用率为1。
实际上,在SVPWM中,Uref的运动轨迹并非一个圆,而是一个正多边形,它的边数受开关频率所影响,开关频率越高,边数越多,它也就越近似一个圆,但同时,开关损耗也就越大。
1.1 基于αβγ坐标系下的三维空间矢量调制
上述为三相三线制的空间矢量调制策略,其空间矢量图为一个平面,故又称为二维空间矢量调制(Two-Dimensional SVPWM,2D-SVM)。而三相四桥臂变流器由于引入了第四个桥臂,使得空间矢量的运动轨迹不再局限于平面,而在立体图中[3], 2D-SVM不再适用,故应采用三维空间矢量调制(Three-Dimensional SVPWM, 3D-SVM)。
3D-SVM最早在文献[20]中被提出并应用于三相四桥臂拓扑中,它的空间矢量图建于αβγ坐标系,该坐标系是在2D-SVM的αβ平面上增加γ轴建立起的三轴正交的坐标系。同时,3D-SVM也继承了2D-SVM的特性[21-22]。四桥臂拓扑的四对开关管,共组成16种开关状态,它们在空间矢量图中所对应的位置如图4所示。
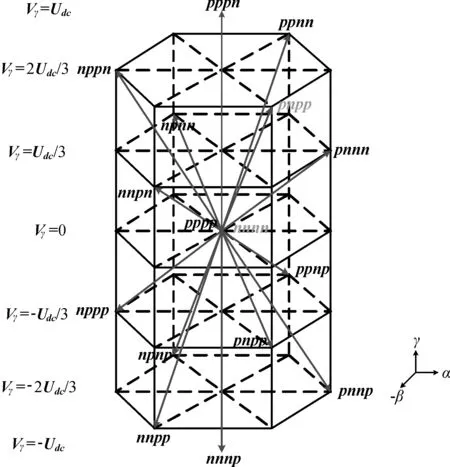
图4 基于αβγ坐标系下的三维空间矢量图
对于αβγ坐标系下的3D-SVM的调制过程在文献中[23-25]都有具体的描述。其大致的实现过程如下:
1)通过式(4)的坐标变换等式,将前三相桥臂与第四相桥臂的中点电压差由abc坐标系转换到αβγ坐标系。
(4)
2)根据步骤1)求得的各种开关状态在αβγ坐标系下的电压值绘制出图4所示的三维空间矢量图。
3)为确定合成参考矢量的3个相邻非零矢量,需要先确定参考矢量所处六棱柱中的位置。该过程分为两步,其一是根据参考矢量在α轴和β轴上的投影的关系确定它位于图4中的哪个三棱柱中;其二是判断它位于三棱柱中的哪个四面体中:取每相邻的三个非零矢量和两个零矢量构成一个四面体,可将每个三棱柱分割为四个四面体,它们可以根据参考矢量在a轴、b轴和c轴上的投影的值的正负极性进行划分。
4)根据式(3)的伏秒平衡方程,计算合成参考矢量的三个非零矢量和零矢量在一个开关周期内的作用时间。
5)进行开关矢量作用顺序的选择,这会对系统的开关损耗和谐波含量等造成影响。文献[23,26]对I类顺序方法(两个零矢量作用)的上升沿对齐,下降沿对齐,对称对齐,交替对齐和II类顺序方法(一个零矢量作用)的上升沿对齐,下降沿对齐,对称对齐,交替对齐共八种排列方式进行分析。结果显示,II类顺序方法在一个开关周期内,开关只需切换6次,开关损耗较低,并且I类中对称对齐的排列方式,输出的谐波含量在八种排列方式中最低。
1.2 基于abc坐标系下的三维空间矢量调制
从1.1节描述的调制步骤可以看出,基于αβγ坐标系下的3D-SVM需进行坐标变化,并且还存在物理意义不够明显等问题[27-28],因此有学者提出了基于abc坐标系下的3D-SVM。该坐标系下的3D-SVM的实现步骤在文献[28,30]都有着详细的叙述,只需根据各种开关状态对应的前三桥臂中点与第四桥臂中点在abc坐标系下的中点电压差便可直接绘制图5所示的三维空间矢量图。
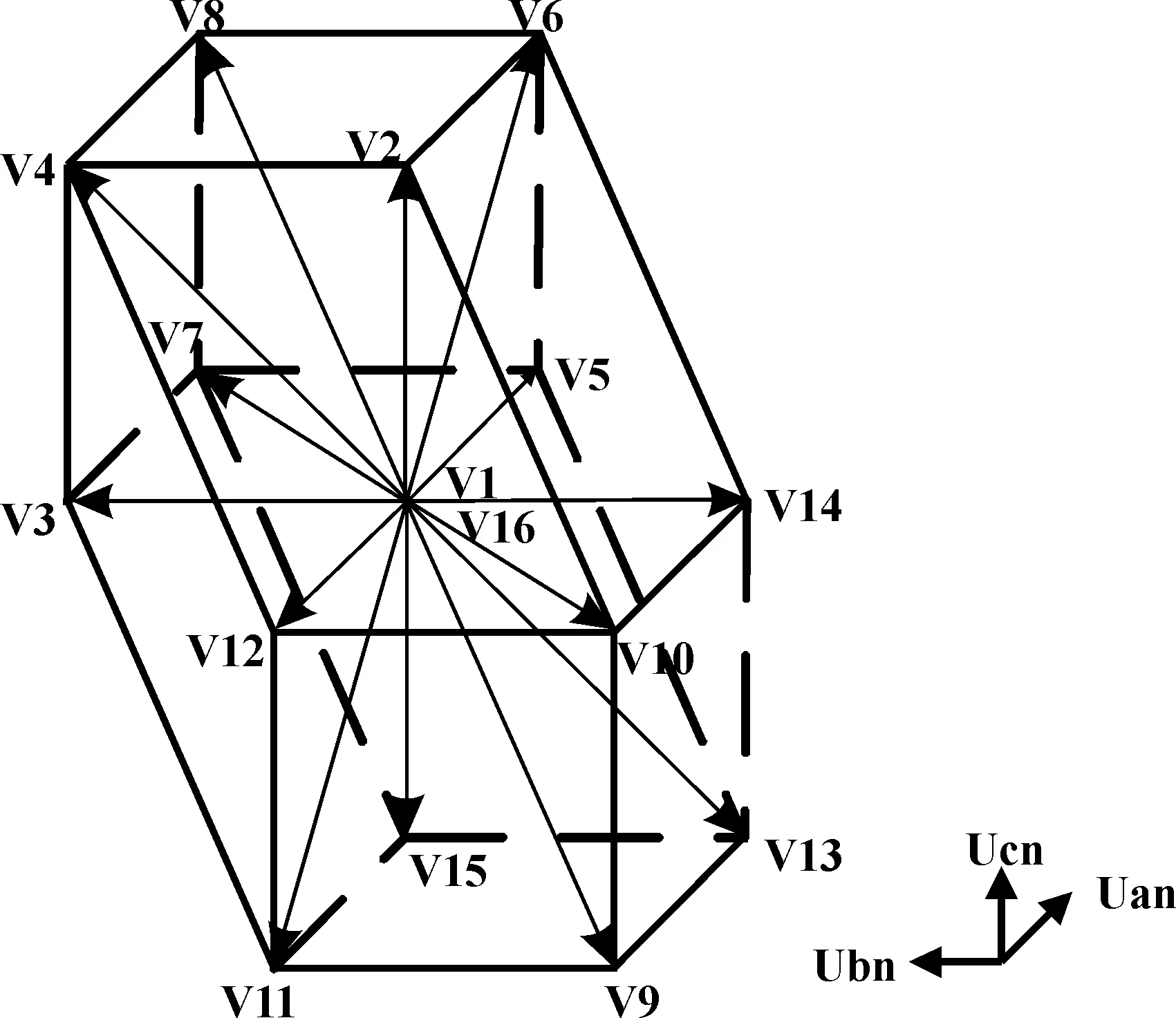
图5 基于abc坐标系下的三维空间矢量图
除去坐标变换,基于abc坐标系下的3D-SVM与αβγ坐标系下的基本调制步骤基本一致。文献[31]中对这两种坐标系下的调制策略进行对比,指出它们的空间矢量图通过一定的角度进行翻转,便可以相互转换,并且得出一个结论:三相参考电压仅取决于开关状态及其持续时间,而与所处坐标无关。
但是,就物理意义层面而言,图5中与坐标轴平行的线段的长度均为Udc,并且在十二面体中,六个面与坐标平面平行,可表示为Van=±Udc,Vbn=±Udc,Vcn=±Udc,其象征着每相桥臂中点对N点的电压不大于Udc。而其他六个平面可表示为Van-Vbn=±Udc,Vbn-Vcn=±Udc,Vcn-Van=±Udc,它们代表着在该调制方法下,线电压小于等于Udc,体现出3D-SVM的最大电压利用率为1。综上所述,abc坐标系下的3D-SVM的物理意义更加清晰。
1.3 基于ghγ坐标系下的三维空间矢量调制
为了降低3D-SVM的计算复杂度,学者致力于对坐标系进行变换,除了上述的两种空间矢量调制策略,还有多种非正交坐标系下的3D-SVM被提出[15,32]。
文献[33-34]提出的基于ghγ坐标系下的3D-SVM是在基于gh坐标系下的2D-SVM[35]的延伸,也是对αβγ坐标系下的3D-SVM的改进,其g轴与α轴重合,而h轴是在g轴的基础上逆时针旋转60。。γ轴保持不变,它们可通过下面矩阵进行变换。
(5)
故可以得到abc坐标系与ghγ坐标系下的变量的转换关系如式(6)所示。
(6)
对比式(4)与式(6)可以发现,变换矩阵中的根号项被消除,计算复杂度也因此得到了减少。
结合三种坐标系下的3D-SVM可知,SVPWM的可以得到较高的直流电压利用率,但同时也带来了繁重的计算量。坐标变换,矢量作用时间计算等矩阵运算以及扇区判断无一不加重软硬件的负担。
2 正弦脉冲宽度调制方法
2.1 传统正弦脉宽调制方法
正弦脉冲宽度调制(Sinusoidal PWM,SPWM)于1964年由A. Schonung教授首次提出并应用于交流传动领域[36]。随着高频开关器件的发展,1975年,S.R. Rowes教授等人才真正把该项技术应用到逆变技术当中,逆变器的技术因此得到进一步的发展[37]。而时至今日,SPWM技术已被广泛应用于逆变器中。
脉冲宽度调制是通过改变脉冲的宽度,以此来达到控制开关器件通断的目的。对于正弦脉冲宽度调制,脉冲宽度是通过正弦波与三角波进行比较得来。并且由面积等效原理:冲量相等而形状不同的载脉冲加在具有惯性环节上,其效果相等[38],可得此时脉冲波的效果等效于正弦波的效果,SPWM的原理图如图6所示。
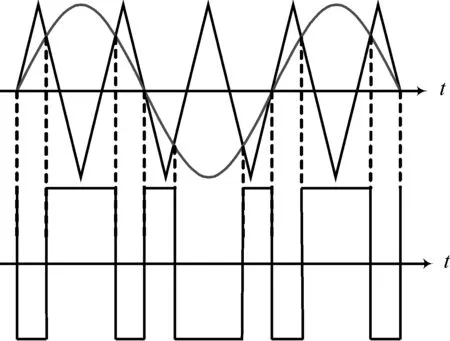
图6 SPWM的原理图
如图6所示,通过对正弦波(调制波)与三角波(载波)进行比较,当调制波大于载波时,输出为高电平脉冲;相反,输出为低电平。高低电平脉冲的持续时间意味着开关器件的通断时间,而它们的交点对应着开关器件的切换点。并且,三角波的频率决定着脉冲波的频率,也即开关频率[39]。
在三相四桥臂变流器拓扑中,上述所述的方法在文献[40]中被提及,文献对第四桥臂采用固定占空比,其他三相桥臂以SPWM进行调制。该方法输出电压的幅值仅为直流母线电压的一半,故其最高电压利用率如式(7)所示,仅为0.866,其中Udc为逆变器直流侧电压的幅值。
(7)
相比于SVPWM,SPWM的实现过程较为简单,但其直流电压利用率却下降了13.4%。
2.2 优化的正弦脉宽调制方法
为兼顾SVPWM的高直流电压利用率以及SPWM的低计算量,有关学者从SPWM的调制原理出发,对SPWM进行优化,提高其直流电压利用率。
早在20世纪90年代,SR Bowes等学者便提出了准优化的SPWM,它是在基波上叠加一个1/4基波幅值的三次谐波,以此来提高直流电压利用率[41-42]。这是因为,三的倍数次谐波分量为零序分量,它不会对三相电压造成影响,但若将该零序分量叠加到原正弦波中,正弦波的波峰会被削平[21]。这就意味着,可以继续增大原正弦波的幅值而不出现过调制的现象,而此时允许调制比大于1,因此,变流器的直流电压利用率得到了提升。
上述优化的SPWM技术同样在三相四桥臂变流器中备受欢迎[43]。在三相四桥臂变流器中,前三相的实现过程与上述的基本类似,通过在调制波的基波分量上叠加一定基波幅值比例的零序分量形成马鞍形的调制波,而第四相桥臂则直接用该零序分量作为调制波。
基于零序分量注入的优化SPWM的原理,有关学者从另一个角度出发,通过对注入的零序分量进行分析计算,使优化后的SPWM的调制波可以完全等效SVPWM[44],该方法被称为基于载波的脉宽调制(Carrier-Based PWM,CBPWM)[45]。
文献[46]中详细记述着该方法的原理和实现过程。为实现CBPWM,需先定义以下变量。
Vmax=max(Van,Vbn,Vcn)
Vmin=min(Van,Vbn,Vcn).
(8)
式中,Van、Vbn、Vcn分别为变流器前三相桥臂中点与第四桥臂中点的电压差。而由于在三相四桥臂变流器拓扑中,四相桥臂中点对地电压不超过Udc,故可以得到第四相桥臂中点对地的电压Vno的取值范围如下。

(9)

(10)
式中,Vno_max、Vno_min为Vno所能取得的最大值和最小值。
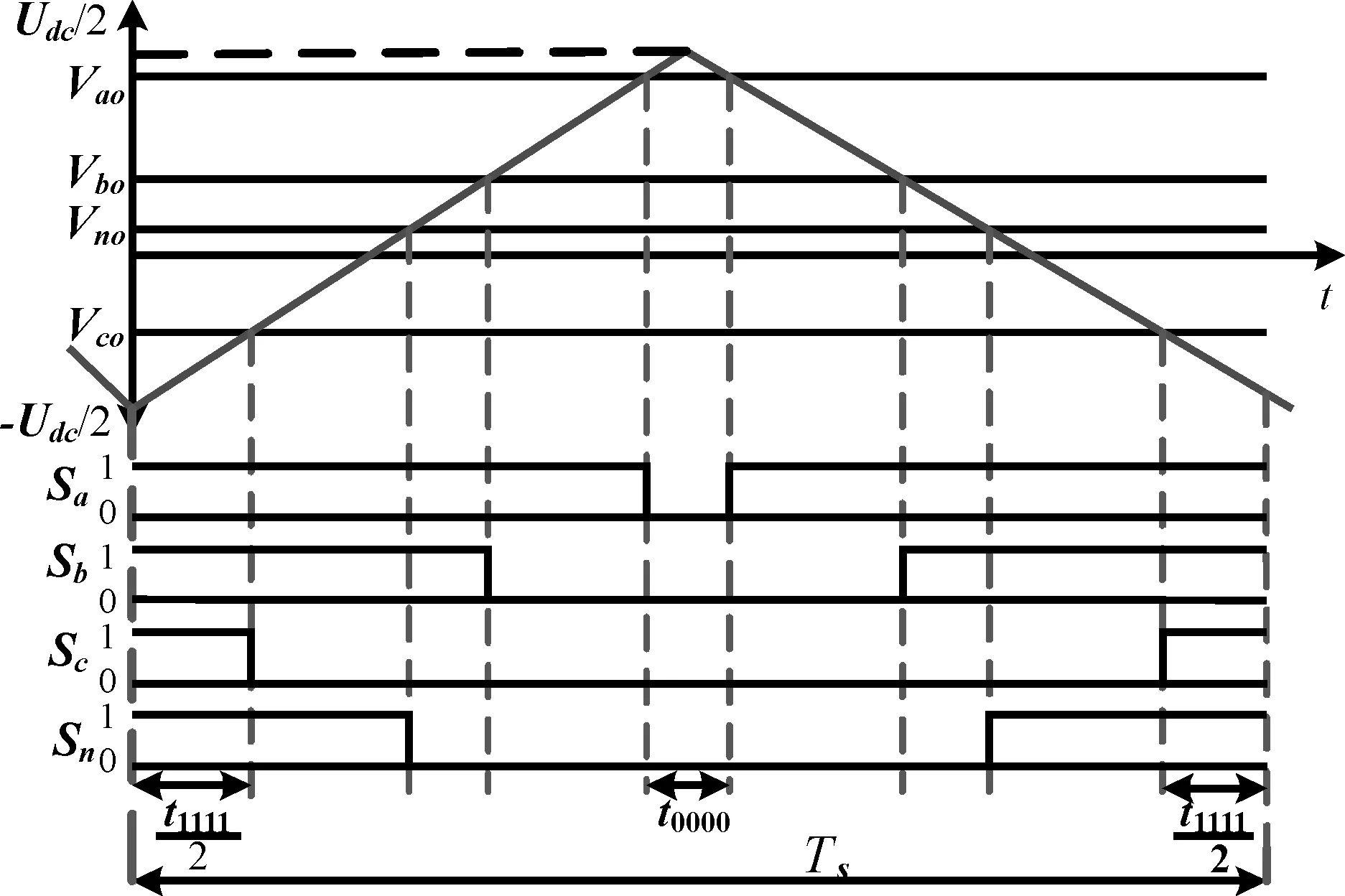
图7 载波调制原理图
如图7所示,若定义变流器下桥臂4个开关管全部导通的时间为t0000,上桥臂4个开关管全部导通的时间为t1111,且定义ξ如式(11)所示
ξ=t0000/(t0000+t1111) ,
(11)
则有
Vno=(1-ξ)Vno_max+ξVno_min.
(12)
把式(9)和式(10)带入式(12),可以得到第四桥臂的调制波在各种情况下的取值如式(13)所示。
Vno=
(13)
CBPWM的实现过程如图8所示。

图8 CBPWM的实现过程
可以发现,此时注入的零序分量不再是简单地取一定比例的基波分量叠加在原三相正弦调制波上,而是需要综合前三相电压的对称性,幅值关系,甚至开关顺序等的综合影响。
在此基础上,文献[45]和[47]通过计算,求得了CBPWM所能取得的三相平衡的最大电压和零序电压分量的最大值。
综合本节所述的方法,CBPWM是通过分析对比SVPWM的调制波,求出了所需注入的零序分量,进而将该零序分量注入到原SPWM的调制波中,对SPWM进行优化,使得优化后的SPWM兼顾了SPWM的低计算量和SVPWM的高直流母线电压利用率。而该载波调制方法还可实现与SVPWM在负载不对称,单零开关矢量等情况下的等效,具有良好的现实意义。
3 离散脉冲宽度调制方式
前二节主要基于直流电压利用率和工程运算量等方面,总结连续脉冲宽度调制方法。而在实际应用中,开关器件的使用寿命、开关损耗或功率损耗也常常需要被考虑,因此,离散脉冲宽度调制被提出。
三相四桥臂变流器中,器件开关损耗的大小通常与变流器一个开关周期内的开关次数有着直接的联系。在脉宽调制方面,为了降低开关损耗,在每一个开关周期内,使其中某相的开关状态不进行改变,以此来减少开关次数,此类方法被命名为离散脉冲宽度调制(Discontinuous PWM,DPWM),其中常见的有以下六种方法[48]:DPWM0, DPWM1,DPWM2,DPWM3,DPWMMAX,DPWMMIN。
文献[49]将αβγ坐标系下的3D-SVM与离散脉宽调制的原理相结合,实现了离散的三维空间矢量调制策略。由于在三相对称情况下,参考电压只经过每个三棱柱的中间两个四面体。取3个相邻的非零矢量和一个零矢量,这两个四面体总共有四种组合方式,分别对应这上述的DPWMMAX、DPWMMIN、DPWM1、DPWM3。该方法由于只用一个零矢量,故一个开关周期内的开关次数由8次降到6次,开关损耗得到了减少。
在CBPWM中,离散三维空间矢量方法的等效方法同样被提出,并且由于无需繁杂的计算量而备受青睐。文献[50-51]通过CBPWM实现了DPWMMAX和DPWMMIN两种离散脉宽调制方式,这两种方法的实现较为简单,只需先判断哪一相的调制波的幅值最大(最小),然后将幅值最大(最小)的调制波设为固定值Udc(-Udc)。所需注入的零序分量可由式(14)和式(15)表示。
DPWMMAX:Vno=Udc-Vmax,
(14)
DPWMMIN:Vno=-Udc-Vmin.
(15)
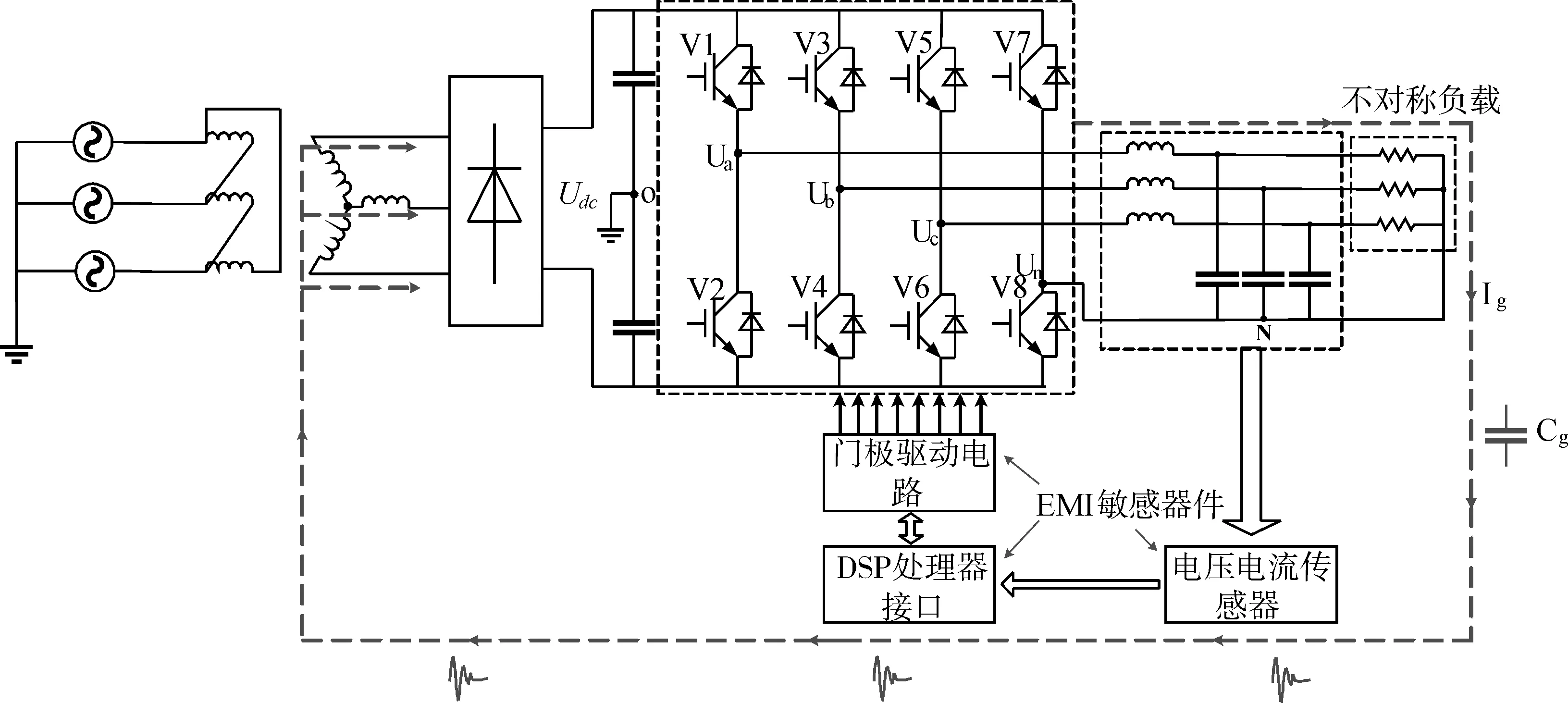
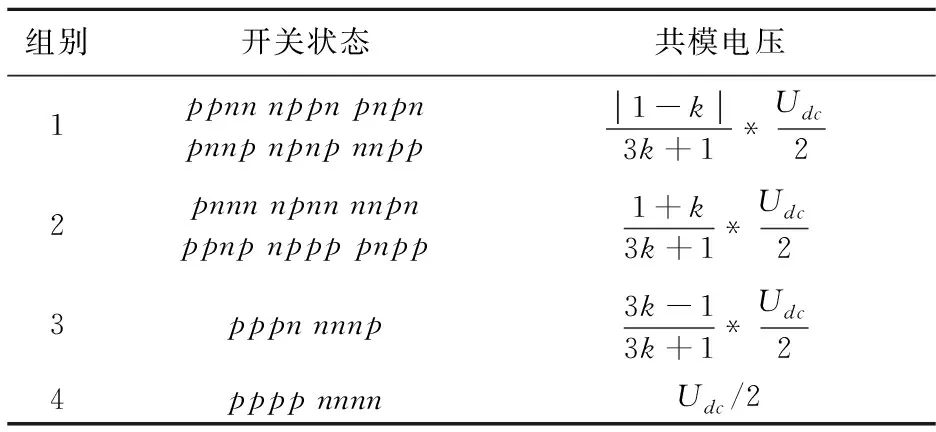
同时,文献中还考虑了负载不平衡的情况,当Vmax<0时,Vno>Vmax,此时DPWMMAX情况下Vno的取值将变为Udc/2。而若Vmin>0时,Vno DPWM0、DPWM1、DPWM2、DPWM3在CBPWM下的实现方法在文献[52]被描述,其中DPWM1、DPWM3需判断Vmax与Vmin的和是否大于0,以此来决定零序分量的取值,DPWM1的具体的判断如下。 (16) DPWM3的判断条件与DPWM1相反。 DPWM2和DPWM4的零序分量的取值则需综合Van、Vbn、Vcn三个值的大小关系以及它们的正负极性进行判断,具体可参考文献[52]。并且文献[52]还结合了瞬时电流对开关损耗的影响,提出了Minimum-Loss DPWM,进一步减少开关损耗。 上述所提的DPWM,是在连续脉宽调制的基础上,通过在任意时刻将某一相的调制波的幅值固定在Udc/2或者-Udc/2,从而使得该相的开关状态保持不变,进而降低了开关损耗。并且由图7所示,若某一相调制波的幅值为Udc/2或-Udc/2,其代表式(11)中的t1111或者t0000为零,即ξ=1或0。综合式(13)~(16)以及其他DPWM的零序分量的取值,可以发现,只要将式(13)中的判断条件进行细化,便可以等效六种DPWM方法。 由于开关管的快速切换,频繁地产生了较高的dv/dt,其通过对地寄生电容产生了共模电流。该共模电流影响着门极驱动电路、传感器、DSP处理器接口以及电机负载等[53],如图9所示。 图9 共模电流路径图 在三相四桥臂逆变器中,为抑制共模电压的影响,除了增加隔离变压器,引入共模滤波器等方法,脉宽调制因为控制灵活、成本较低而引起广泛的关注。在该拓扑结构中,共模电压UNo被定义为负载中性点对地的电压大小,根据基尔霍夫定律可以得出计算公式(17)[54]。 (17) 其中k=L/Ln,根据式(17)可得3D-SVM中16种开关状态分别对应的共模电压的大小如表1所示。 根据表1可知,共模电压和开关状态以及前三相桥臂与第四相桥臂电感的比值k有关,且零矢量所对应的共模电压恒等于Udc/2。 为此,文献[54]提出了一种无零矢量作用的3D-SVM,它采用了除零矢量外的其他14个矢量去合成参考电压,通过采用与零矢量相邻的非零矢量以及该非零矢量的互补矢量来等效零矢量,除此之外,该调制策略的其他步骤与传统的3D-SVM的步骤一致,最后文献证明了该调制策略的共模电压幅值为传统3D-SVM共模电压的1/2,并且其电压利用率仍然为1,但该方法较传统3D-SVM,输出电压畸变率却有所上升。 表1 开关状态与它们对应的共模电压 类似的方法在文献[55]也被提及,它同样是避免采用零矢量参与参考矢量的合成,不同点在于对六棱柱中各个四面体的划分,以及非零矢量的选取。该方法合成参考矢量的四个非零矢量皆为相邻矢量,有效地减少了开关损耗。 通过表1还可发现,当k=1时,组别1中的六个开关矢量的共模电压为0。文献[56]利用这个特性,提出了一种零共模电压的调制策略。组别1中的六个开关矢量在αβ平面上的投影如图10所示。 图10 组别1中的开关矢量在αβ平面上的投影 通过判断参考电压位于正六边形中的哪个投影区域,然后选取其相邻的四个开关矢量对其进行合成,后续的矢量作用时间以及作用顺序的实现步骤与传统3D-SVM一致,该方法虽然理论上可以消除共模电压,但同时,它也带来了开关损耗大,电压利用率低等劣势,其电压利用率只有0.866。 文献[53,57]还提出了一种基于载波调制的抑制共模电压的方法,该方法通过载波移相的方式,将三相载波的峰值错开1/3个周期,其实质是通过调整载波,避免前三相桥臂同时出现上桥臂导通或者关断的情况,而第四桥臂只需通过判断前三个桥臂的脉冲波幅值是否大于1.5来生成占空比。但该方法只在调制比小于0.667的时候才有比较显著的效果,故文献[53,57]在载波移相的基础上还提出载波二次移相和跳变后移等方法,通过软硬件对原调制策略中出现零矢量的区域进行调整,有效地提高调制比,但同时也增大了输出电压的谐波含量。 上述抑制共模电压的无零矢量调制方式与零共模电压调制方式的调制步骤与第1节所述的3D-SVM的调制步骤基本类似,不同之处在于,为减少共模电压,根据需求,避免部分非零矢量参与参考矢量的合成,而这往往导致谐波含量增加、开关损耗增加、电压利用率降低等问题。而基于载波调制的抑制方法虽然实现简单,却很难兼顾高调制比以及低谐波含量。 基于两电平三相四桥臂变流器拓扑,对现有的几种典型的脉宽调制方法进行介绍。并从电压利用率、开关损耗、共模电压大小和具体计算量等方面进行了详细讨论。针对不同的应用场合,可以根据不同的控制目标,选择合适的调制方法。但在实际应用中,上述提到的调制方式仍存在一些待解决的问题。 1)在三相四桥臂变流器拓扑中,降低开关损耗往往只从如何减少开关通断次数入手,较少有考虑电流对开关损耗的影响,DPWM仍有进一步优化的空间。 2)在3D-SVM中,为了有效地抑制共模电压,需选择合适的开关矢量对参考电压进行合成,但这同样面临高计算量的问题。寻求一种等效的载波调制方式或改善原有的载波移相调制方法,仍值得进一步研究。
4 减小共模电压的调制方法

5 结语
