多通道FxAP算法的电动汽车路噪控制∗
2022-03-05郭剑锋
宫 臣 吴 鸣 郭剑锋 韩 荣 刘 锋 杨 军
(1 中国科学院噪声与振动重点实验室(声学研究所)北京 100190)
(2 中国科学院大学 北京 100049)
(3 太原理工大学 太原 030024)
0 引言
主动噪声控制(Active noise control, ANC)技术从20 世纪80年代开始在汽车行业应用[1−4],研究范围已覆盖发动机噪声控制[5]、传动系统噪声、路噪和风噪控制[6−8]、车内听感改善[9−11]等多个方面。过去车内噪声控制主要关注于发动机转速相关的线谱噪声,线谱噪声可以通过汽车转速计获取,对于线谱噪声的控制已经形成了较为成熟的应用[12]。
现阶段,车辆的电动化已逐渐成为交通运输领域发展的新方向。电动汽车没有发动机燃烧噪声,因此路噪控制成为主动噪声控制技术的关注重点[5]。道路噪声频带宽、传递路径复杂、参考信号不易获取,因此路噪控制研究难度较大。
降噪系统的关键是自适应滤波器维纳解(最优滤波器)的选取,而维纳解与信号的统计特性息息相关[13]。在实际的行车环境中,汽车行驶速度不一,路面特征也不尽相同,这些因素使得道路噪声的统计特性不断变化,也就意味着维纳解将随之改变。只有快速收敛的算法才能收敛到最优值,进而获得更大的降噪量。传统的滤波-x 归一化最小均方(Filtered-x normalized least mean square,FxNLMS)算法在汽车恒定速度行驶时有一定的控制效果[2−3],但是其收敛速度缓慢,不能适应变化的噪声[14];递归最小二乘(Filtered-x recursive least squares, FxRLS)算法有较好的收敛性能,但是计算复杂度太大且存在数值不稳定问题,尽管诸多学者提出简化FxRLS复杂度的方法,可是距离实时应用还有一段距离。
滤波-x 仿射投影(Filtered-x affine projection,FxAP)算法提供了在FxNLMS和FxRLS 算法之间收敛性能和计算复杂度两者的折中[14]。Ferrer等[15]将FxAP算法运用到单参考的降噪头靠系统,但是使用的是单参考的ANC系统,只能控制单一方向的噪声。针对于真实的噪声,往往是来自于多个方向,因此多通道的系统显得尤为重要。Bouchard[16]详细描述了多通道的改进FxAP(Modified FxAP,MFxAP)系统,并对其多通道计算量进行了详细分析。本文提出将FxAP 算法应用于电动汽车路噪控制,用FxAP 算法收敛速度快的优点,解决路噪控制维纳解不断变化的问题,以获得更好的噪声控制效果。
本文通过分析电动汽车噪声特性,指出了算法收敛速度对于噪声控制效果的重要性。针对FxNLMS 算法在路噪控制中收敛速度慢、降噪量低的问题,使用了一种基于多通道FxAP 算法的道路噪声控制算法来提升噪声追踪性能,提升降噪量。最终,本文将所提算法应用于降噪头靠系统中,并通过实车道路降噪实验验证了所搭建系统的可行性,该头靠系统在电动汽车路噪控制方面有借鉴意义。
1 电动汽车噪声特性分析
在ANC 中,通过获取参考信号以及误差信号,求取系统的维纳解。控制器将参考信号与维纳解卷积输出,抵消噪声信号。在噪声平稳条件下,维纳解是系统的最优解。
图1是电动汽车行驶时车内噪声的声压级。此时车速在40~100 km/h范围内变化。可以发现,电动汽车的噪声最大差距为10 dB,总体平均噪声维持在88 dB左右。
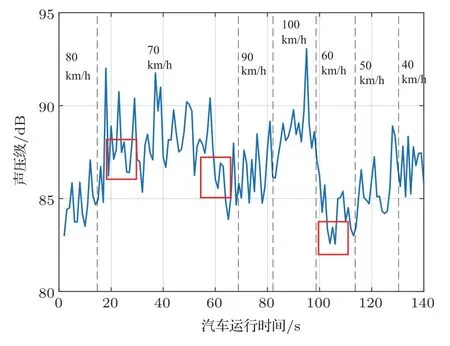
图1 电动汽车运行时的声压级Fig.1 Sound pressure level of electric vehicles while driving
以不同的车速行驶,录制电动汽车车内的噪声信号。每个车速40~100 km/h运行时间都是30 s。
图2是不同时速下的噪声功率谱,可以发现噪声集中在500 Hz 以下的部分,因此本文主要关注于500 Hz以下的噪声。在30 Hz处和240 Hz处有两个较为明显的谱线。从图2中可以看出,在车辆正常行驶时车速不断变化,噪声功率有明显差异。车速到达60 km/h 之后,在300~1000 Hz 频段噪声比低速时增加了9 dB;随后车速增加,该频段噪声在3 dB范围内变化。
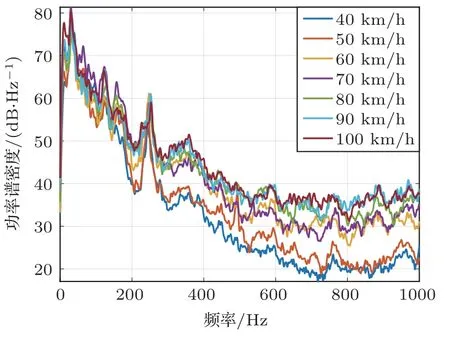
图2 不同时速下的噪声功率谱Fig.2 Noise power spectral density at different speeds
控制器的维纳解[2](最优滤波器)为

其中,Rxx为滤波-x 信号自相关矩阵的期望,Rxd为滤波-x信号和噪声信号互相关的期望。维纳解是根据当前的噪声的统计特性计算出来的最优滤波器,噪声的变化会造成维纳解的变化。同理,维纳解的变化也可以反映车内噪声的统计特性的变化。选取图1中画红框的3 个运行时间段(22 s、23 s、24 s;59 s、60 s、61 s;104 s、105 s、106 s),计算对应的维纳解的幅值和相位如图3(a)~(c)所示。
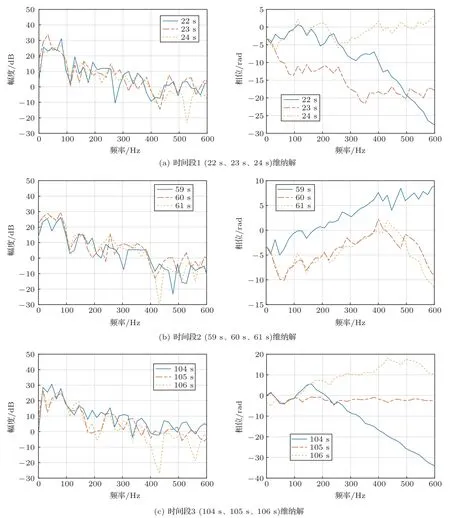
图3 不同时间段的维纳解Fig.3 Wiener solution at different times
通过对比3 个时间段的维纳解的幅值和相位,可以发现,几乎在每个时刻,维纳解都是在变化的。图3(a)、图3(b)分别是时间段1、2 内噪声的维纳解,此时的车速均是为70 km/h。可以发现,车内噪声的维纳解差异很大,这表明车速只是影响车内噪声的原因之一,其他的影响因素(路面平整程度、轮胎等)对于噪声的影响可能更大。图3(c)是时间段3内噪声的维纳解,这时噪声声压级为83 dB 左右,是所记录时间中噪声最小的时间段。可以发现,即使是噪声变化缓慢的时刻,车内噪声的维纳解依然在不断变化,在图3(c)中,150 Hz 处105 s 和106 s 的维纳解相位有着接近1.5π 的差异,这种差异极大影响降噪系统的性能。在ANC系统中,维纳解改变之后,如果控制器滤波器系数不改变,输出的信号便无法和噪声反相,进而无法抵消噪声,影响降噪效果,甚至反而会抬升噪声。因此,无论车速变化快慢与否,车内的噪声以及维纳解都是在变化中的,想通过固定系数的方法来控制路噪都是不可能的。需要自适应算法来自动更新降噪系统的控制滤波器,以适应不断变化的路噪,而不用受限于造成路噪变化的原因。
经典的FxNLMS 算法,结构简单,被应用于很多场合。但是其收敛速度较慢,意味着很难适应不断变化的维纳解。FxAP算法收敛速度快,追踪能力强[13−16],适用于不断变化的噪声。针对路噪控制系统对于收敛速度的高要求,本文提出应用FxAP算法控制路噪,并与经典的FxNLMS算法对比。
2 多通道ANC算法
多通道ANC 算法框图如图4所示。此系统有I个参考信号,J个次级源,K个误差信号。滤波器长度为L,Sj,k表示为次级源j到误差点k的次级通路传递函数,它的长度为M,可以表示为Sj,k=[sj,k(0),sj,k(1),···,sj,k(M −1)]T,为Sj,k的估计值,表示为第i个参考信号xi(n)通过控制器wi,j(n),产生输出信号yj(n)表示为
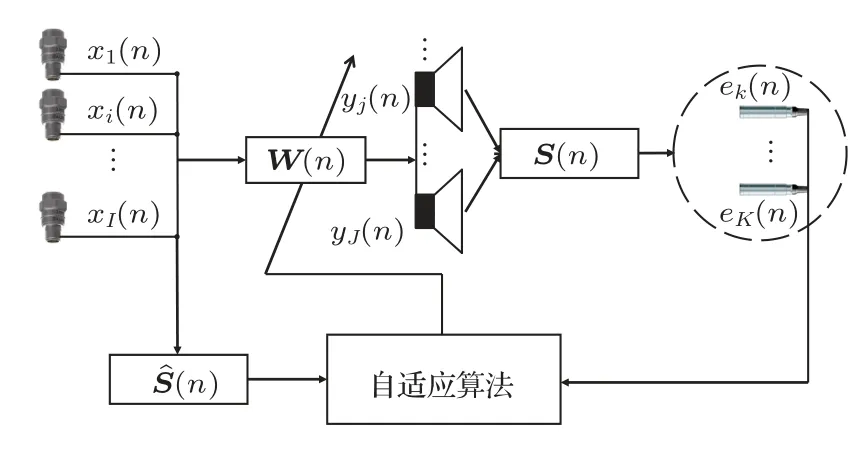
图4 多通道主动噪声控制系统流程图Fig.4 Block diagram of a multi-channel ANC system
其中,xi(n)=[xi(n),xi(n−1),···,xi(n−L+1)]T,是过去L个时刻的参考信号组成的向量。
yj(n)经过次级通路Sj,k,到达误差点k,与原始噪声信号dk(n)叠加,得到误差信号ek(n);同时自适应算法根据xi(n)和ek(n)来更新滤波器系数wi,j(n)。
2.1 多通道FxNLMS算法
当图4中的自适应算法是归一化最小均方(Normalized least mean square, NLMS)算法时,图4就是经典的FxNLMS 算法框图,该算法的更新公式[17]为

2.2 多通道FxAP算法
当图4中的自适应算法是仿射投影(Affine projection,AP)算法时,图4就是FxAP算法框图,令投影阶数为P,FxAP 算法使用到了过去P个时刻的误差向量,于是把使用到的信号排列成矩阵,表示为

其中,每个元素yj(n)可通过公式(2)获得。
误差信号矩阵ek(n)可表示为
式(8)中,


为了简便表示,令
式(10)可以进一步写为

进而目标函数记为
使用拉格朗日乘子法,可求得FxAP 算法的更新公式为

式(13)中,

其中,δ是一小量,用来防止矩阵求逆时出现不稳定情况。
同样,FxAP 类算法也有很多改进形式,例如MFxAP(Modified FxAP)算法[14],它通过重构误差向量,加快收敛速度。可以表示为
即误差传声器拾取信号E(n)之后,不直接去更新滤波器,而是用估计出来的误差信号(n)做运算。这个操作消除了次级通路的时延对系统的影响,进一步提升了收敛速度[17]。由于MFxAP算法对于误差信号的重构会带来计算量的增加,为了减少运算量,前人研究了许多快速MFxAP 算法[14],其中容易实现的Fast FxAP 算法。它是在正则化因子δ很小的时候,对于矩阵求逆进行近似。Fast FxAP 中误差信号向量简单记为

算法收敛时间跟滤波-x 信号相关矩阵的特征值散度有关[2],特征值散度越大,收敛越慢。FxAP算法可以加速收敛主要是因为对于滤波-x 矩阵进行求逆,它是一种预白化操作[14],减少了特征值的散度,加快了收敛速度。
2.3 计算复杂度分析
本节考虑硬件实现复杂度的问题, 对FxNLMS、FxAP、MFxAP、Fast FxAP 算法的运算量进行分析。
上述算法实现的时候,需要计算的变量分别是yj(n)、E(n)、U(n)、R−1(n)、W(n+1),其中4 种算法都需要计算yj(n)、U(n)、W(n+1)三个变量,需要J ×IL+IJK ×M+IJK ×KP次乘法和J ×I(L −1)+IJK×(M −1)+IJK×KP次加法,把他们分别记为C×和C+。总结4 种算法复杂度如表1所示。
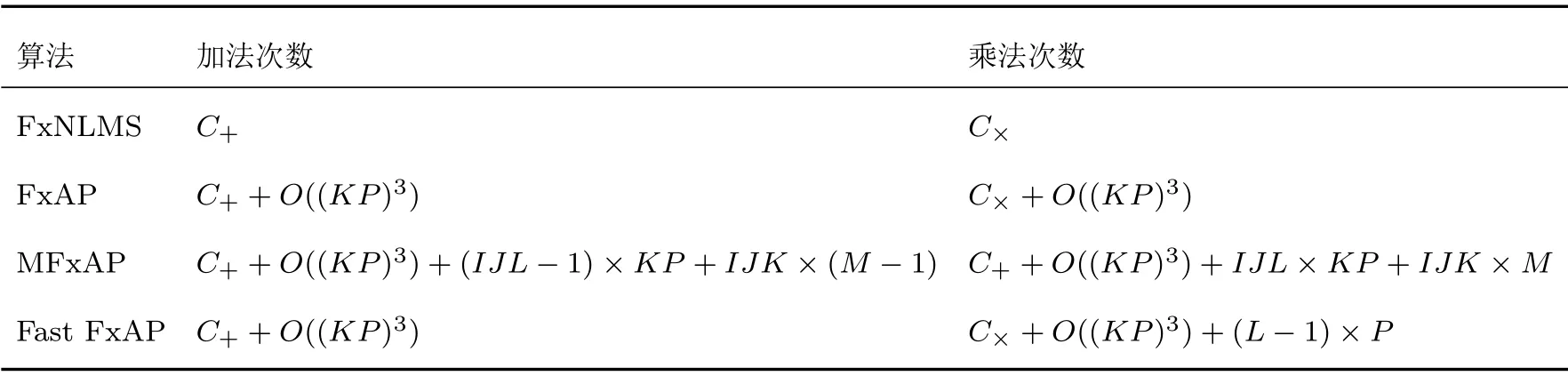
表1 不同算法复杂度Table 1 Complexity of different algorithms
相比于FxNLMS 算法,FxAP 算法计算量主要增加在矩阵求逆过程中;MFxAP 算法的还需要计算虚拟误差信号矩阵,这个步骤的计算量非常大,Fast FxAP算法是对求解虚拟误差信号矩阵这个过程的一个近似,只是增加了(L −1)×P个乘法,这个计算量增加是可以接受的。
2.4 算法仿真
本节使用图1中的汽车运行数据进行仿真,仿真用参考信号为车内误差传声器采集的噪声信号向前时延100 点获得,次级通路传递函数如图5所示。S1,1表示1 号扬声器到达1 号误差点之间的传递函数,其余命名以此类推。次级通路比较理想,主要集中在前100阶。
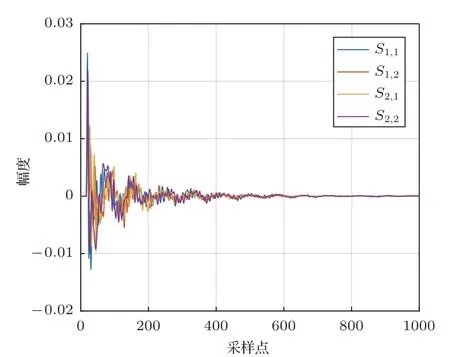
图5 次级通路传递函数Fig.5 Secondary path transfer function
仿真参数按照如下设置:滤波器长度L= 512,次级通路长度M= 256,步长µ= 0.001,投影阶数P=4,仿真采样率为8000 Hz。
仿真结果如图6所示。 在自适应算法中,FxNLMS 降噪效果最差,这是因为在对比的这几种算法中,FxNLMS 算法收敛速度最慢,其他算法(MFxAP、Fast FxAP、FxAP)由于收敛速度接近,所以降噪性能接近。但是MFxAP、Fast FxAP算法需要对误差信号进行重构,增加了计算复杂度,同时降噪量提升不明显。考虑到算法的硬件可实现性,选取了计算量相对较小的FxAP 算法进行实车实验。
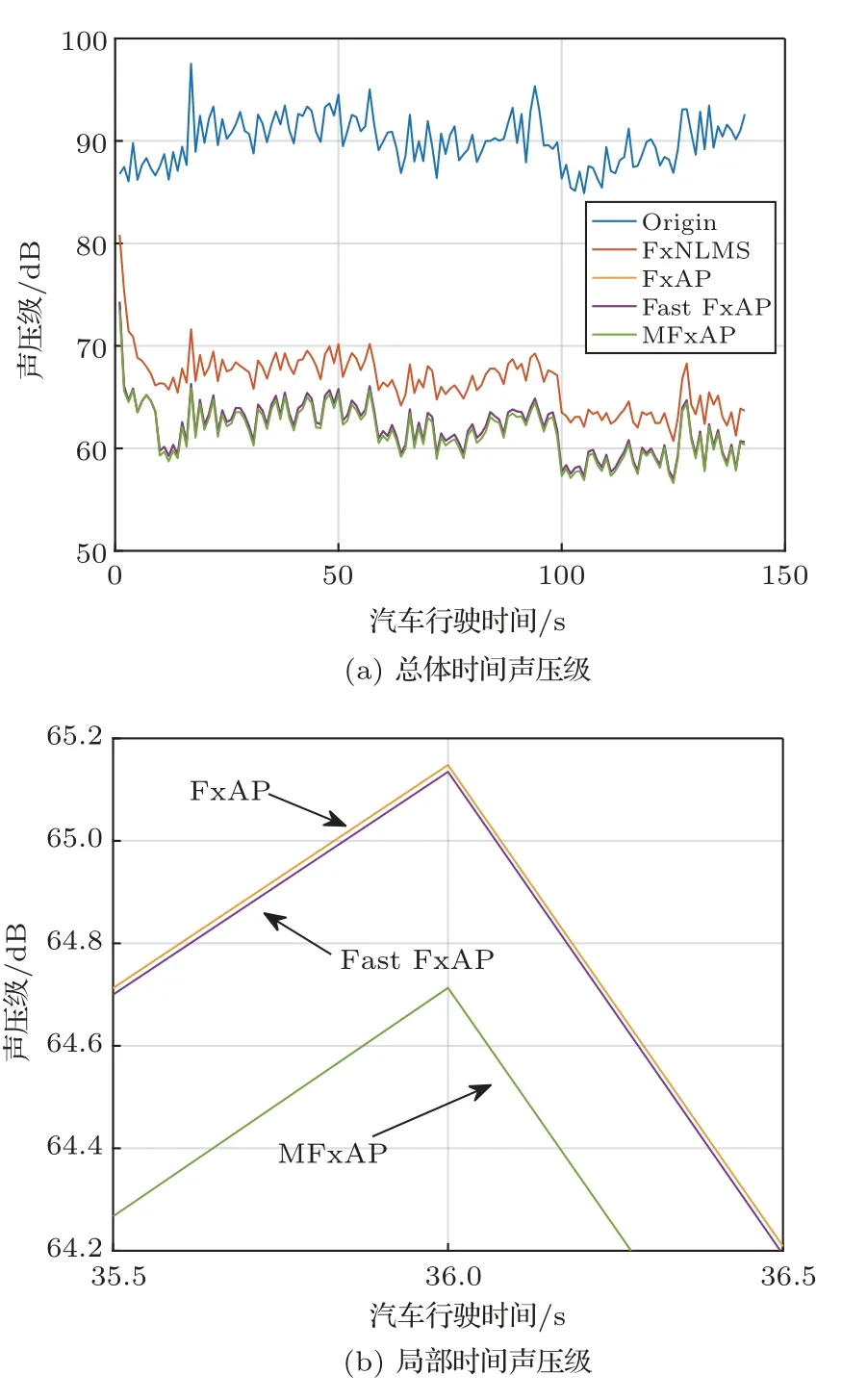
图6 不同算法降噪效果仿真对比(500 Hz 以下)Fig.6 Simulation comparison of noise reduction effect of different algorithms(under 500 Hz)
3 路噪控制头靠系统
为了验证不同算法的收敛性能以及降噪效果,本文建立了一个电动汽车路噪控制头靠系统。该系统以电动汽车底盘上的加速度信号为参考信号,通过自适应控制算法,控制副驾驶头靠处的路噪声。Cheer 等[18]使用汽车底板上的传声器作为参考信号,实现8 dB 的路噪控制。然而,此方法使用声学的参考信号,无法避免参考传声器拾取车内人声,很难走向实用。对于车内路噪控制的反馈算法[19−20]虽然可以不用参考信号,但是反馈算法的水床效应使得高频噪声抬升,影响了降噪效果。对于经过底盘振动传递到车内的这类传递路径明确的路噪声,前馈算法稳定并且能够获得更好的降噪效果。同时使用加速度计提供参考信号可以避免声学反馈问题,因此本文选取以加速度计作为参考的前馈控制算法对车内路噪进行控制。通过前期对于车内噪声特性、相干性以及传递路径分析,选取了5 个较好的参考点对于噪声进行前馈控制。
3.1 头靠系统布置
在某品牌纯电动汽车中布置了一个5×2×2的ANC 系统如图7所示,系统包含5 个加速度计(ACC1-ACC5)、2 个次级源(SS1、SS2)、2 个误差点(ES1、ES2)以及2 个监测点(MS1、MS2)。5 个加速度计分别布置在车辆前后左右4 个悬架以及车辆右前方的横梁上,如图8所示。
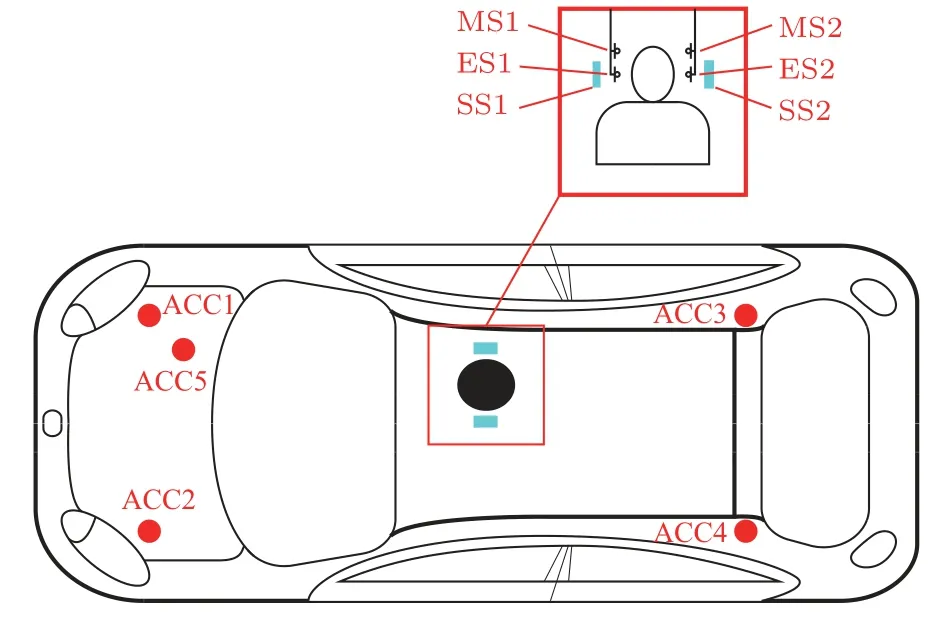
图7 5×2×2 ANC 系统示意图Fig.7 Diagram of 5×2×2 ANC system
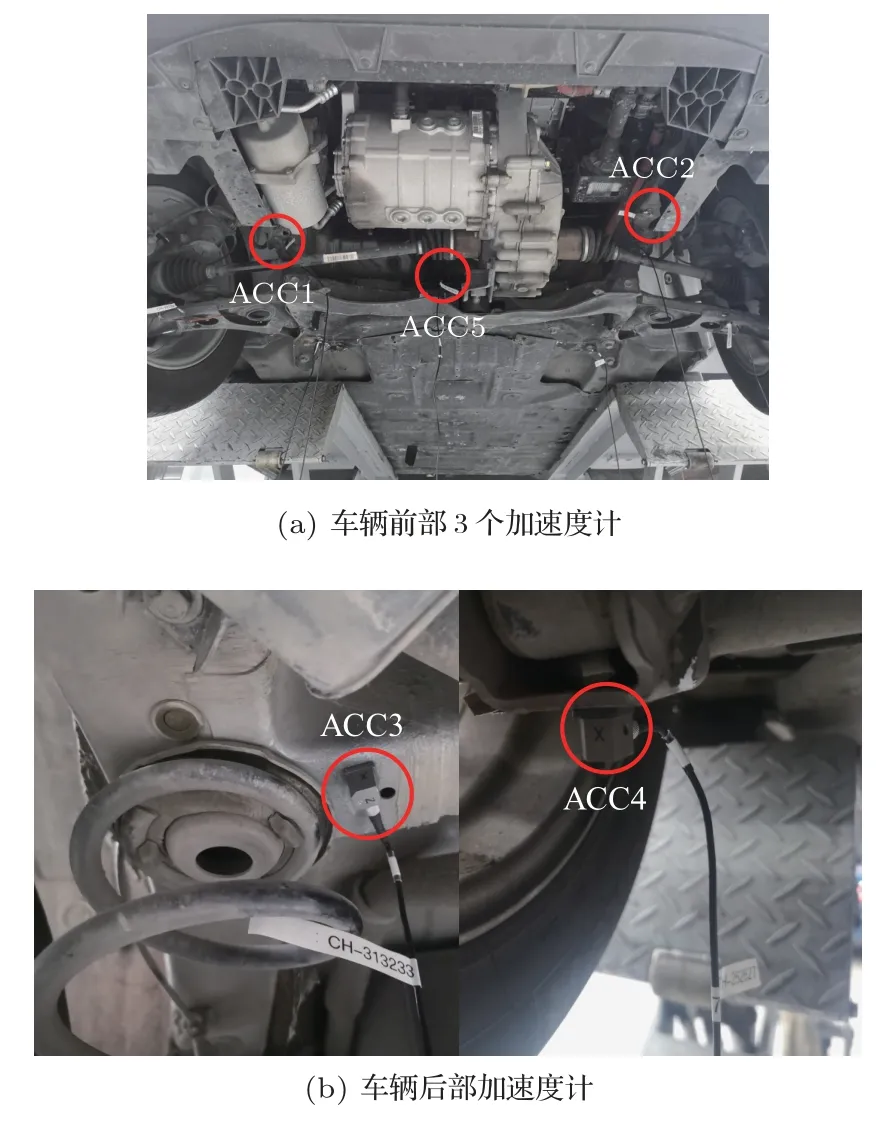
图8 加速度计布置图Fig.8 Arrangement of accelerometers
降噪头靠放置在车辆副驾驶头枕两侧,如图9所示。次级声源使用的是7.62 cm 扬声器,误差传声器放置在次级声源上方5 cm处,靠近人头自然放置时耳朵位置,监测传声器放置在误差传声器上方1 cm处。

图9 副驾驶降噪头靠布置Fig.9 ANC headset at passenger seat
3.2 实车实验
通过硬件实现多通道FxNLMS 算法以及FxAP 算法,来验证算法的性能。系统控制器如图10所示。底盘上面的5 个加速度计信号以及头靠两侧的误差信号,通过AD 模块,转换成数字信号,传入控制器。控制器采用TI的多核DSP处理器,放在电动汽车后座。DSP 系统采用多核并行处理架构,主核心负责采样、输出;多个从核心并行运算,更新滤波器系数;计算好的反相的数字信号被DA 模块转化成模拟信号,经过低通滤波器和功放,最终被扬声器播放出来。
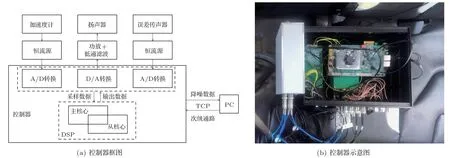
图10 降噪系统控制器Fig.10 Noise reduction system controller
次级通道通过白噪声离线建模,在电脑端使用NLMS方法辨识,每个通路长度为256阶,通过网络发送到DSP系统;系统采样率为8 kHz,自适应滤波器长度为512阶,AP算法投影阶数为4阶。
实验在同一段路面上进行,汽车运行时间为30 s。车速在70 km/h 左右变化,副驾驶处有乘客,同时有一记录人员在汽车后排记录数据。分别记录关闭降噪算法、使用FxNLMS 算法、使用FxAP 算法这3种情况下的车内噪声,结果如图11所示。
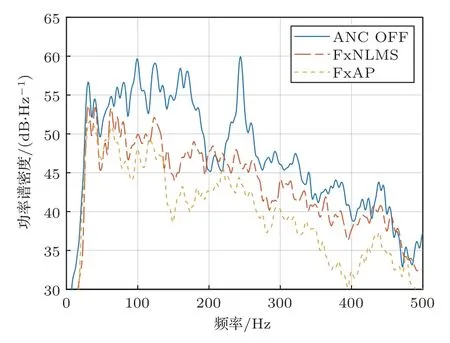
图11 实车实验中不同算法的降噪量Fig.11 Noise reduction in ANC system
图11 是3 种情况下汽车运行总时间内头靠系统监测点处噪声的功率谱密度,对噪声功率谱进行了一个20 Hz的高通滤波。实验在同一路段,多次测量,进行了线性平均。蓝色实线表示关闭ANC时的车内噪声功率谱,红色点线是使用多通道FxNLMS算法时头靠双耳处的噪声功率谱,黄色虚线是使用多通道FxAP 算法时头靠双耳处的噪声功率谱。双耳处的功率谱分别为左耳、右耳处的噪声功率谱线性平均获得。红、黄两线分别与蓝线之间的距离表示系统的降噪量,距离越大,降噪量越大。可以明显看出,黄线表示的FxAP算法获得的降噪量更大,并且50 Hz 以上任意频率处,FxAP 算法的降噪效果均优于FxNLMS算法。
对于500 Hz 以下噪声,FxNLMS 算法使总声压级降低了5.6 dB,FxAP 算法使总声压级降低了8.3 dB。在100~200 Hz 频段,FxNLMS 算法降噪量为6.5 dB,FxAP 算法降噪量是10.6 dB,对车内噪声起到了明显的控制效果。因此,通过该实验可以说明FxAP 算法能够应用于实车系统,并有较好的路噪控制性能,与仿真结论一致。FxAP 算法可以自适应调整滤波器追踪噪声的变化,实现更好的降噪效果,为电动汽车路噪控制提供了一个有效的解决方案。本文实车实验在70 km/h车速情况下进行,如果车速等因素带来的车内噪声变化过于剧烈,可能超出自适应滤波的调节范围,进而影响降噪效果。对于不同车速、不同路面和不同轮胎的路噪降噪效果测试,也是接下来值得研究的工作。
4 结论
本文针对传统FxNLMS 算法在路噪控制中收敛速度慢、降噪量低的问题,使用了一种基于多通道FxAP算法的道路噪声控制算法。通过对电动汽车噪声的分析、算法仿真、实车实验,证明了算法的有效性和可行性。在研究过程中得出以下结论:
(1)路噪控制维纳解变化迅速,需要自适应算法收敛速度足够快才能有控制效果。
(2)FxAP 算法性能优于FxNLMS 算法,其他改进的FxAP 类算法(MFxAP、Fast FxAP)比普通的FxAP 算法性能提升不明显且复杂度较高,可实现性差。
(3)基于多通道FxAP 算法的电动汽车路噪控制系统,算法收敛速度快,使车内双耳处500 Hz 以下噪声声压级降低了8.3 dB,为电动汽车路噪控制提供了较好的应用方案。
