基于载波相位差分技术的电力巡检无人机转运平台研究
2022-03-02李宁李波马聪惠郭瑞红蒋学平
李宁,李波,马聪惠,郭瑞红,蒋学平
(1.国网宁夏电力有限公司超高压公司,宁夏银川 750011;2.合肥偌天电气科技发展有限公司,安徽合肥 231131)
0 引言
传统的电力设施巡检技术受线路环境和地形影响存在巡检效率低、人员安全风险大等问题,促进了无人机在电力设施巡检方面的迅速发展[1-3]。目前无人机开展电力设施巡检作业时,需要专业飞手控制或者依赖固定机巢实现自主巡检作业[4-6]。人工操作无人机进行电力设施巡检作业严重依赖飞手的个人能力,采用固定机巢的方式可以解决人员需求的问题,但固定机巢成本高,机巢兼容性差,未能在变电站领域大规模推广应用。为实现无人机自主变电站巡检作业,本文设计一款无人机转运平台,将固定机巢的功能融合进无人机转运平台。设计的无人机转运平台相比于固定机巢具有费用低,操控灵活,不受外界因素影响,方便将无人机运输至指定起飞位置,可以提高巡检无人机的续航能力。
1 系统整体设计
为提高无人机转运平台的定位精度,实现无人机转运路径的精准可靠,本文设计的无人机转运平台采用载波相位差分技术,又称实时动态差分(real time kinematic,RTK)定位技术。转运平台分为转运平台控制系统、定位导航系统及无人机归中装置。转运平台控制系统负责平台的行走功能,定位导航系统负责定位和路径规划,两部分通过串口通信完成对转运平台的控制,同时设计了无人机的归中装置。系统的整体构成如图1所示。
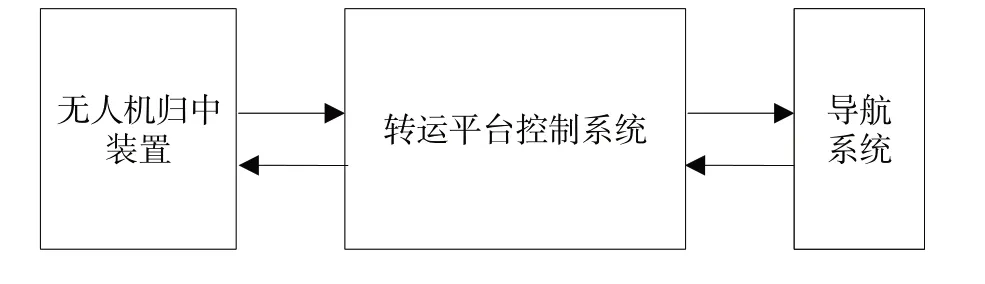
图1 系统的整体构成
1.1 转运平台控制系统
转运平台的轮毂采用麦克纳姆轮,可以实现平台的直行、横行、斜行及原地转弯等行进方式,使得转运平台运动更加灵活。由于麦克纳姆轮具有点动微调的功能,可以满足高精度定位及轨迹跟踪的要求。为实现对平台的控制,主控芯片采用ATmega2560,此款MCU含有10路PWM输出端口满足对转运平台运动的控制,含有4 路串口满足通信功能,控制系统硬件如图2所示。
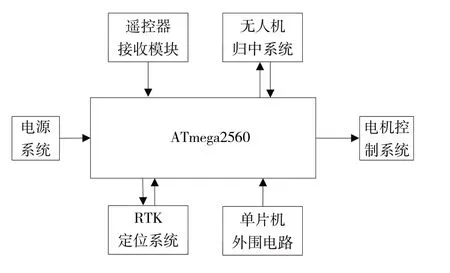
图2 硬件控制系统
要实现对转运平台多种行进方式的控制,需要正确安装麦克纳姆轮和控制多轮组合运动,同一侧麦克娜姆安装要按照内八形式安装,麦克娜姆轮正确安装如图3所示。
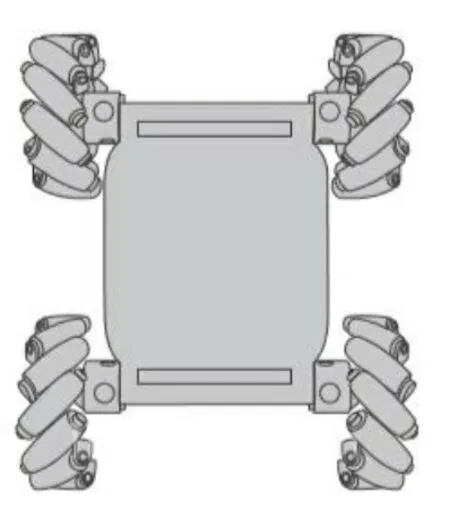
图3 麦克娜姆轮安装结构
多轮组合实现不同的运动方式,不同组合方式运动方向如图4所示。
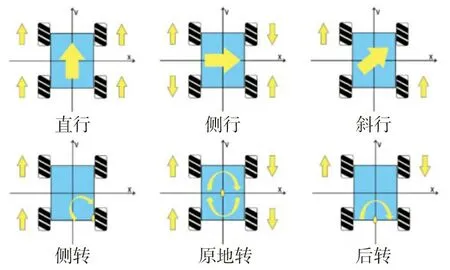
图4 平台运动方式
由图4 可知要实现平台多种运行方式需要4个麦克纳姆轮配合控制。为实现对转运平台的灵活控制,软件系统在完成初始化操作后,平台处于停止状态,MCU 处于运行方式指令接收状态。当MCU 接收到新的指令,需要判断此指令是否是结束指令,如若是结束指令则平台结束运行,否则根据接收到的新指令控制平台执行对应的控制指令。
1.2 RTK定位导航系统
GPS 是日常生活中常见的定位方式,但是由于GPS存在较大定位误差的缺点使其在高精度定位场合无法使用[7-8]。所设计的巡检无人机转运平台对定位精度要求较高,为此系统选择RTK 定位系统,如图5所示。
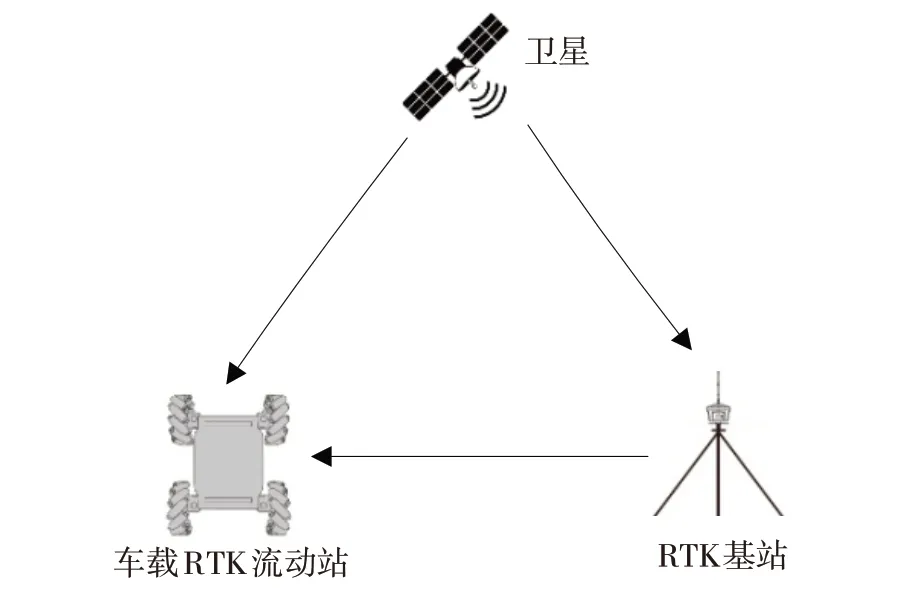
图5 RTK定位系统原理
RTK是根据GPS定位系统提出的相对定位的概念,此定位方式下需要放置一台接收机在已知点,即称为基站;另一台接收机放置在设计的移动平台,即巡检无人机转运平台。在RTK 定位模式下,基站和流动站同步采集定位数据,RTK 基站将采集的卫星数据通过无线数传模块将观测值和基站站点坐标传送至流动站,流动站利用相对定位原理对接收到的数据进行差分处理,即可获得厘米级定位结果[9-11]。
本文选用的RTK 模块可以输出$GPGGA、$PTNL,PJK 及$GPTRA 数据帧,通过对上述三种数据帧进行解析,可以得到经纬度信息、大地坐标信息及航向角信息。为了计算的简便性,本系统运用大地坐标和航向角作为路径导航的关键信息。使用RTK 定位系统可以实现厘米级定位误差,使用此定位系统可以使无人机转运平台运行路径更加精确。
2 导航定位算法设计
通过对RTK 数据帧进行解析,可以获得当前位置的大地坐标和航行角大小。在大地平面坐标系中,RTK 的坐标轴是以X轴正方向为正北方向,Y轴的正方向为正东,正北方向是航向角0o,顺指针旋转航向角逐渐增大,航向角的范围为0o≤β<360o。为了实现导航功能首先需要确定该运行路径的标识点,通过对标识点连线获得两点的航向角和直线运动方程,即可实现路径导航功能。
2.1 航向角的计算
由于RTK 解析出的航向角范围为0o≤β<360o,为此需要将计算出的航向角根据实际航向转换成对应的角度。航向角计算流程如图6所示。
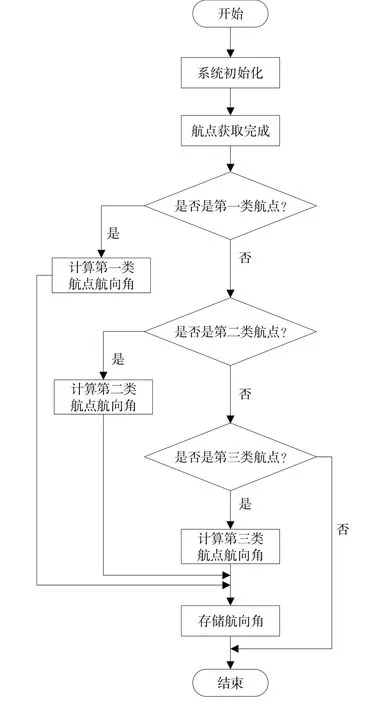
图6 航向角计算流程
本系统航向角的计算分为三大部分:1)大地坐标Y和X是正向比例关系;2)大地坐标Y和X是反向比例关系;3)航线与坐标轴平行。
1)在第一种情况下航向角的范围如式(1)所示。
式中:β1为第一种情况下的航向角范围。
相邻两航点符合第一种关系时,计算出的k>0;当(X1<X2 且Y1<Y2)时,航向角为0o~90o,计算atan(k)即可得出实际的航向角。当(X1>X2 且Y1>Y2)时,航向角为180o~270o,计算atan(k) + π可得实际航向角。
2)第二种情况下航向角的范围如式(2)所示。
式中:β2为第二种情况下的航向角范围。
相邻两航点符合第一种关系时,计算的k<0;当(X1>X2且Y1<Y2)时,航向角为90o~180o,计算公式如式(3)所示。
当(X1<X2且Y1>Y2)时,航向角为270o~360o,计算公式如式(4)所示。
式中:k为地理坐标两点间的斜率。
3)第三种情况下航向角的范围如式(5)所示。
式中:β3为第三种情况下的航向角。
通过计算两坐标点的X轴或Y轴坐标是否相等及两坐标大小确定航向角的大小。在计算航向角的同时把计算出的斜率k值保存,同时计算出两点直线方程的截距b进行保存。
2.2 导航设计
上述航向角计算中根据保存的航点可以计算出任意两点的航向角、k值及b值。将转运平台放置在起始航点,开启航点循迹功能。转运平台首先调整航向角,航向角调整正确后,在前进中获取RTK 流动站大地坐标X和Y值,将X坐标带入当前航点线性方程中求取理论Y值,对比理论Y值和实际Y值误差是否大于设定误差,如若大于设定的偏差值控制转运平台在运行中向误差小的方向移动。当转运平台到达某一航点,判断是否到达终点,如若到达终点需要停止运行,将巡检无人机放飞,否则将航向角调整至下一航线的航向角并继续运行。转运平台巡航设计流程如图7所示。

图7 转运平台巡航流程
3 无人机柔性归中装置设计
本巡检无人机选用的是精灵Phantom 4 RTK,此款无人机集成了全新的RTK 模块,具有更精准的定位能力,在无人机返航时可以利用无人机本身扫码降落功能将无人机降落在指定的转运平台位置。由于无人机降落时存在误差,很难降落在转运平台的中心位置,现有的无人机归中装置结构复杂体积大,为此本文设计了无人机柔性归中装置,结构如图8所示。

图8 无人机归中装置结构
无人机柔性归中装置由四个伸缩拉线盒固定在平台四个角,碳素纤维线将伸缩拉线盒连接并与步进电机转槽固定。步进电机正转在碳素纤维线和伸缩盒的作用下可以将无人机归中至平台中心位置,此状态下无人机被固定可以方便转运平台的运输;步进电机反转将伸缩拉线盒复位至原先位置,此状态下可以将无人机放飞。图9所示为无人机转运平台实物图。

图9 无人机转运平台实物图
4 效果验证
由于该无人机转运平台使用的RTK 导航系统基站的通讯距离在5 km 以内,转运平台在基站所能覆盖的范围内都可正常运行。为了验证导航系统的定位精度及无人机的转运效果,将标记有白线的路径设计为转运平台的运行路径,在实际运行过程中无人机转运平台偏移白色标记线的误差验证导航系统的定位误差。经过实际验证导航系统的定位误差在±30 cm 内。由于设计的转运平台采用大容量锂电池供电,经过实际测试转运平台持续运行时间在5 h 内。相比于固定机巢可以提升巡检无人机的续航能力,同时也解决了固定机巢受安装位置影响的因素。
5 结论
针对电力巡检无人机固定式机巢存在的弊端,运用机器人平台构建了移动式无人机转运平台,结合RTK 导航实现了转运平台的精准定位,研制了柔性归中装置实现无人机在转运平台的归中作业,最终解决了固定机巢存在的局限性问题。实验结果表明转运平台可以按照设定的航点精准运动,归中装置可以有效将无人机归中,导航系统的定位误差在±30 cm 内。后期结合无人机机库开展多机型无人机多站点电力设施无人机巡检作业,可以进一步拓展无人机转运平台的应用价值。