基于主控微源的内环参数切换控制策略
2022-03-02吴玫蓉
吴玫蓉
(国网宁夏电力有限公司电力科学研究院,宁夏银川 750011)
0 引 言
随着新型电力系统的加快建设,电网从集中式能源生产向分布式能源大规模利用转变。微网作为分布式能源的有效管理方式受到国内外研究的关注,其中主从控制被广泛应用于国内外的微网示范工程中[1-4]。并网运行时,微网内所有的微源均采用P/Q控制策略。并网转孤岛运行时,主控微源从P/Q切换为u/f控制,为微网系统提供电压和频率支撑。主控微源指的是当微网从并网转孤岛以及孤岛运行时,系统发生能量变化时,主控微源能够快速地注入或吸收能量,以维持系统电压和频率的稳定。主控微源一般选择微型燃气轮机、柴油发电机、储能等可控分布式电源(distributed generation,DG)。
微网如何从并网运行平稳地切换至孤岛运行是目前的研究热点。文献[5]提出包含滤波电感电流环、滤波电容电压环和并网电感功率外环组成的三环控制策略,确保并网切换至孤岛时微网的稳定运行和供电可靠性,但文中忽略了储能系统内环参数对平滑切换的影响。文献[6]提出改进电压环调节器、软件锁相方法及储能主控微源的控制器参数优化设计方法,但在设计主控微源控制器参数时并没有考虑P/Q控制和u/f控制的不同特性,并且缺乏对优化参数的仿真验证结论。
针对采用主从控制策略的微网,搭建主控微源变换器的通用控制模型,在文献[7]提出的从并网转孤岛的平滑切换控制方法基础上,提出基于主控微源的内环参数切换控制策略。该控制策略的核心是内环PI控制器的参数设计方法,因此根据P/Q控制和u/f控制目标的不同,分别采用二阶系统和三阶系统设计相应的内环PI 控制器参数。最后在PSCAD/EMTDC 中搭建的典型微网算例,针对是否采用切换内环参数控制策略,对目标值跟踪、系统的频率和电压结果进行对比分析,仿真结果表明本文提出的基于主控微源的内环参数切换控制策略,能够提升微网从并网切换至孤岛运行模式时系统的稳定性和供电可靠性。
1 主控微源变换器的通用控制系统建模
图1 为主控微源变换器的控制原理,根据微网管理系统(microgrid management system, MMS)下发的运行指令,并网运行时主控微源采用P/Q控制策略,根据配电网的运行需求输出相应有功功率和无功功率;孤岛运行时采用u/f控制策略,为微网系统提供支撑电压和频率。相位同步控制目的是保证微网与主电网的相位同步[8],包括并网运行时的锁相控制策略和孤岛转并网运行时的相位同步补偿控制策略,此处不再赘述。其中Udc为直流侧电压,Va、Vb、Vc为变换器桥臂电压的矢量值,L、C、R、iLi(i=a,b,c)、ui(i=a,b,c)分别为LC滤波器的电抗、电容、阻尼电阻、流过的电感电流、输出电压和输出电流,iZj(j=a,b,c)为负载电流,ugi(i=a,b,c)为网侧电压。

图1 主控微源变换器的控制原理
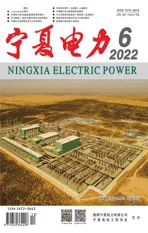
图2 为主控微源变换器的控制系统结构框图,根据文献[8]主控微源的控制器包括外环控制器和内环控制器,外环控制器主要根据MMS下发的不同控制目标,选择P/Q控制或u/f控制策略给定内环电流控制器的参考值idref和iqref,P/Q控制和u/f控制分别通过式(1)和式(2)给定idref和iqref:
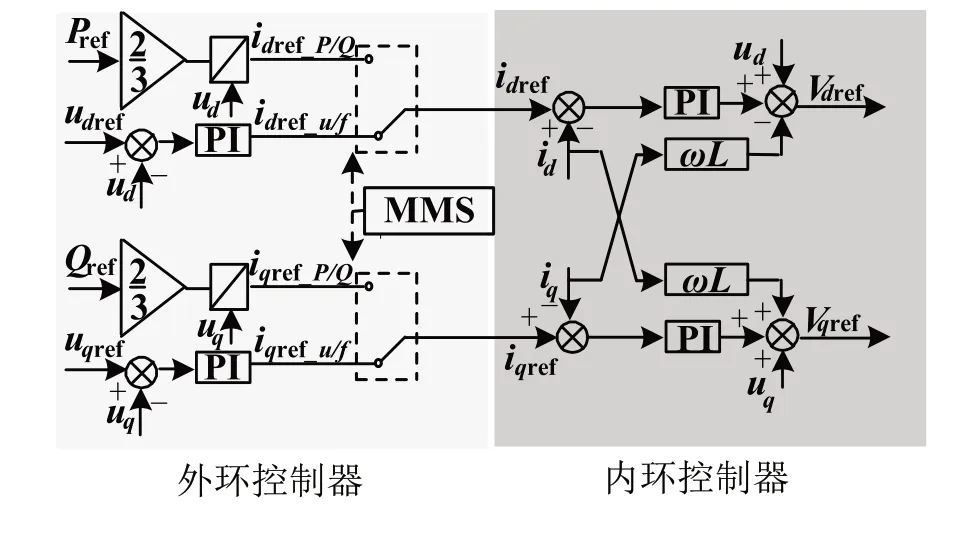
图2 主控微源变换器的控制系统结构
式中:idref_P/Q,iqref_P/Q,idref_u/f和iqref_u/f分别为P/Q和u/f控制给定的内环控制器d轴和q轴的参考电流;ud和uq为LC滤波器输出的三相电压的dq变换;udref和uqref为u/f控制电压外环的d轴和q轴参考值,一般取udref为系统电压幅值,uqref为0;kuP和kuI为电压外环PI控制器的比例系数和积分系数。
由文献[6]可知主控微源的三相电压型脉冲宽度调制(pulse width modulation,PWM)变换器的模型d轴和q轴相互耦合,因此引入前馈解耦控制策略,内环电流控制器的控制方程如式(3):
式中:Vdref和Vqref为内环电流控制器输出的电压指令;kiP和kiI分别为PI控制器的比例和积分参数;id和iq为流过LC滤波器三相电流的dq变换;ud和uq为LC输出三相电压的dq变换。
2 内环参数切换控制策略
内环电流控制器采用PI控制器,其中比例环节用于提高系统的开环增益,积分环节用于消除系统的稳态误差,但由于主控微源采用P/Q和u/f两种控制策略,若PI控制器采用同一参数会造成无法满足控制要求,甚至引起微网系统的频率和电压失稳。因此,针对微网从并网转孤岛运行的模式,本文基于文献[7]的平滑切换控制策略,提出切换内环电流控制器参数的方案,即根据主控微源所采取的控制策略的不同设计内环控制器的PI参数,在微网的运行模式切换时同时进行PI控制器参数的切换。
2.1 基于二阶系统的P/Q控制内环参数设计
P/Q控制外环控制器通过式(1)得出指令值,对内环电流控制器的PI参数并无影响,因此在后文的设计过程中仅考虑内环电流控制系统。
为了更接近实际中的离散控制过程,在图2 的基础上,考虑电流环采样的延迟和PWM的小惯性特性,引入电流环采样延迟传递函数GI(s)、逆变器的传递函数GC(s)和PI控制器的传递函数分别为[9]
式中:Ts为主控微源PWM 变换器的电流采样周期。
在基波情况下,忽略流过电容的电流,则控制对象LC滤波器的传递函数为
将式(4)和(5)中的时间常数0.5Ts、Ts合并后,且暂不考虑uq的扰动,得到d轴电流内环的简化控制结构,如图3所示。
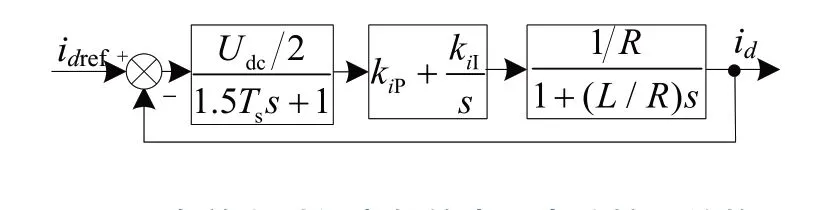
图3 合并小时间常数的内环电流控制结构
当主控微源变换器PWM 的采样频率足够高时,能够忽略图3 中等效时间常数1.5Ts的影响,因此d轴电流内环的控制结构可进一步简化如图4所示。

图4 忽略小时间常数的内环电流控制结构
由图4可得内环电流控制系统的开环传递函数Woi(s)和闭环传递函数Wci(s)分别为
式中:Kp=Udckip/2;KI=UdckiI/2。
由式(9)的闭环传递函数可知电流内环为二阶系统,因此可得内环控制系统的阻尼比ξ和自然振荡频率ωn为
结合式(9)和(10)可计算出内环电流控制器的参数kiP和kiI为
根据自动控制原理[10],在二阶系统的控制参数设计中一般取ξ=0.4~0.8,此时系统的超调量适度,并且调节时间较短。
2.2 基于三阶系统的u/f控制内环参数设计
当主控微源采用u/f控制时外环控制器通过式(1)得出指令值,由于外环控制器亦采用PI 控制器,因此在设计内环电流控制器参数时需要考虑外环的影响。
u/f控制的目标是LC的输出电压ui(i=a,b,c),忽略LC滤波器的电阻,根据基尔霍夫定理可得图1所示的主控微源变换器的数学模型为
由式(12)可知电流内环的控制对象传递函数为式(13),电压外环的控制对象传递函数为式(14)。
在图2的基础上考虑实际过程的离散控制得到如图5所示的u/f控制的d轴控制系统结构。由图5 可知内环控制器的输入为idref_u/f,输出为id,同第2.1 节暂时忽略ud对电流内环的影响。则内环控制器的传递函数为

图5 采用u/f控制的结构
式中:iZd为LC滤波器的输出三相电流经过dq变换后d轴的值;kPWM为2.1 节中忽略时间常数后PWM变换器的增益,kPWM=Udc/2。
式(15)中采用u/f控制的内环电流控制器输出id包括两部分:第一部分为内环电流控制器对外环控制器给定的参考值的跟踪情况;第二部分为负载电流iZd对内环电流控制器的扰动情况。根据式(15)可知采用u/f控制器的内环电流控制器为三阶系统,可采用系统的特征根法进行控制器的参数的设计。内环电流控制器的闭环特征方程如下:
在控制工程实际中通常要求控制系统具有较快的响应速度、一定的阻尼程度以及减少死区、间隙和库伦摩擦等非线性因素对系统的影响,此时要求三阶及以上高阶系统设计时具有一对共轭主导极点即可,在此设三阶系统的特征根为
式中:S1和S2为共轭主导极点;S3为非主导极点。则电压电流双环控制系统的闭环特征方程亦可表示为
对比式(16)和(18)易知ξ=0,并且可得内环控制器PI的计算公式为
3 仿真分析
3.1 算例描述
本文在PSCAD/EMTDC 平台搭建如图1 所示的微网系统结构,DG1和DG2的容量为500 kVA,DG1为主控微源,DG2为可再生微源,负荷为load1、load2和load3。仿真参数如下:
(1)负荷容量。
load1:0.80 MW+j0.16 Mvar;
load2:0.20 MW+j0.26 Mvar;
load3:0.40 MW+j0.15 Mvar。
(2)负荷参数。10 kV 线路的单位电阻为R=0.132Ω/km,X=0.253Ω/km;35 kV 线路的单位电阻为R=0.45Ω/km,X=0.435Ω/km;Z1n、Z2n、Z3n为0.4 kV 线路等效电阻,长度分别为242 m、508 m、207 m;Z4n为10 kV线路等效电阻,长度为15 km。
(3)主变压器参数。变压器的接地方式均为Y/△连接,隔离变压器T1和T2容量均为500 kVA,变压器变比为0.4/10 kV;主网变压器Tz容量为8 MVA,变压器变比为10/35 kV。

图6 仿真微网系统结构
设置仿真时间为5 s,t=2 s前DG1和DG2均采用P/Q控制策略,DG1、DG2的有功功率和无功功率参考值分别设置为0.4 MW,0 Mvar 和0 MW,0 Mvar;t=2 s 时,微网从并网切换至孤岛运行,DG2作为主控单元切换为u/f控制,DG1仍采用并网运行时候的P/Q控制。根据上述仿真参数,对上述设计的内环电流控制器参数进行如下验证:
Case1,当t=2 s 时DG1未切换内环控制器的参数,即孤岛运行时内环仍采用P/Q控制设计的内环控制器参数。
Case2,当t=2 s 时DG1采用内环控制器参数切换控制策略。
3.2 仿真结果
Case1 的仿真结果如图7 至图10 所示,当微网从并网切换到孤岛时(t=2 s),DG1亦从P/Q控制切换为u/f控制,但内环控制器的d轴和q轴实际电流均无法跟踪目标值,而且呈震荡发散状态;由于u/f内环控制器无法跟踪目标值导致外环亦无法跟踪目标值,此时系统电压和频率在并网转孤岛时近似为0.8 p.u.和53 Hz,微网处于孤岛状态时频率和电压亦超过标准所允许的范围并且不断振荡发散,导致系统失去稳定性。综上可知,主控微源不采用切换内环电流控制器参数的策略会造成系统无法平滑地从并网切换至孤岛,严重时更无法保证微网的电压和频率稳定。

图7 内环控制器的d轴电流(Case1)

图8 内环控制器的q轴电流(Case1)
图9 微网的系统频率(Case1)

图10 微网的系统电压(Case1)
Case2 的仿真结果如图11 至图14 所示,t=2 s时微网运行状态切换至孤岛,DG1的内环电流控制器均在0.5 s内快速跟踪电流目标值,运行模式切换后系统电压最大偏差为-0.08~0.05 p.u.、频率最大偏差为-0.3 ~0.5 Hz,均在标准规定的允许范围内。

图11 内环控制器的d轴电流(Case2)

图12 内环控制器的q轴电流(Case2)

图13 微网的系统频率(Case2)

图14 微网的系统电压(Case2)
综上分析可知当采用本文的内环电流控制器参数设计方法时,能够保证从并网切换到孤岛运行时主控微源快速跟踪目标值,进而保证系统的平滑切换和孤岛运行的稳定性。
4 结论
在采用主从控制的微网中,为了使微网平滑地从并网运行切换至孤岛运行,提出一种基于主控微源的内环参数切换控制策略。在建立主控微源通用控制模型的基础上,根据不同的控制目标,分别通过典型二阶系统和三阶系统设计P/Q控制、u/f控制内环PI 控制器的参数,在微网从并网转孤岛的同时切换内环参数。最后搭建微网仿真算例,分析结果表明所提出的策略不仅满足控制系统快速跟踪目标值的特性,而且能够主动支撑系统的电压和频率。