无信号T型交叉口左转车辆驾驶行为对交通流的影响
2022-03-01邹常丰刘天阳胡宝雨
邹常丰,刘天阳,胡宝雨
(东北林业大学 交通学院,黑龙江 哈尔滨 150040)
0 引 言
随着城市交通飞速发展,城市交通拥堵的问题日益严重。交叉口是城市道路网通行能力的瓶颈,根据交叉口实际情况进行合理的交通规划和管理成为提高城市道路交通效率、缓解交通拥堵问题的关键因素[1-2]。其中,基于元胞自动机理论研究交通流问题得到学界的广泛应用[3-8]。元胞自动机模型演化规则简单、易于实现,能有效地模拟交通流中车辆微观运动状态,对深入了解车辆间相互作用机理具有很强的适应性。
越来越多的学者采用元胞自动机模型对交叉口处的交通流特性进行了研究。彭勇等[9-10]研究了驾驶员特性对信号交叉口交通流的影响,建立了基于元胞自动机的信号交叉口交通流模型,还通过建立车辆等待变道和继续行驶这两种情况下的交叉口元胞自动机模型,对比分析了这两种情况对道路交通流产生的影响;朱昶胜等[11]结合实际的城市T型交叉口交通情况,提出了一种T型交叉口多种速度混合交通流的元胞自动机模型;施俊庆等[12]研究了无信号控制交叉口的车辆优先通行权分配规则,构建了双向交通的城市路网交通流元胞自动机模型;张兴强等[13]将右转机动车和直行自行车作为对象,分析了交叉口混合交通流的机非干扰机理。
T型交叉口将道路互相连接起来构成网络,由车辆转向而引起的冲突、交汇、分流等车流行为使得T型交叉口的交通特性变得尤为复杂。T型交叉口主路车道的交通量大、车速快,而主路左转车辆的转弯半径大、车速慢,对交叉口主路交通流造成较大影响。为研究无信号T型交叉口左转车辆驾驶行为对交叉口交通流的影响,笔者建立了基于元胞自动机的无信号T型交叉口交通流模型,分析了在不同驾驶行为下,主路左转车辆对交叉口主路车流车均冲突频次与延误影响。
1 建立模型
车辆在无信号交叉口进行左转时,若与对向直行车辆发生冲突,根据交通法规左转车辆应采取避让措施。为全面了解与分析T型交叉口主路左转车辆的驾驶行为,笔者选取河北省邢台市清河县渤海路与湘江街T型交叉口作为观察对象,利用视频录制的方式采集数据。渤海路为交叉口主路,湘江街为交叉口支路,交叉口示意如图1。
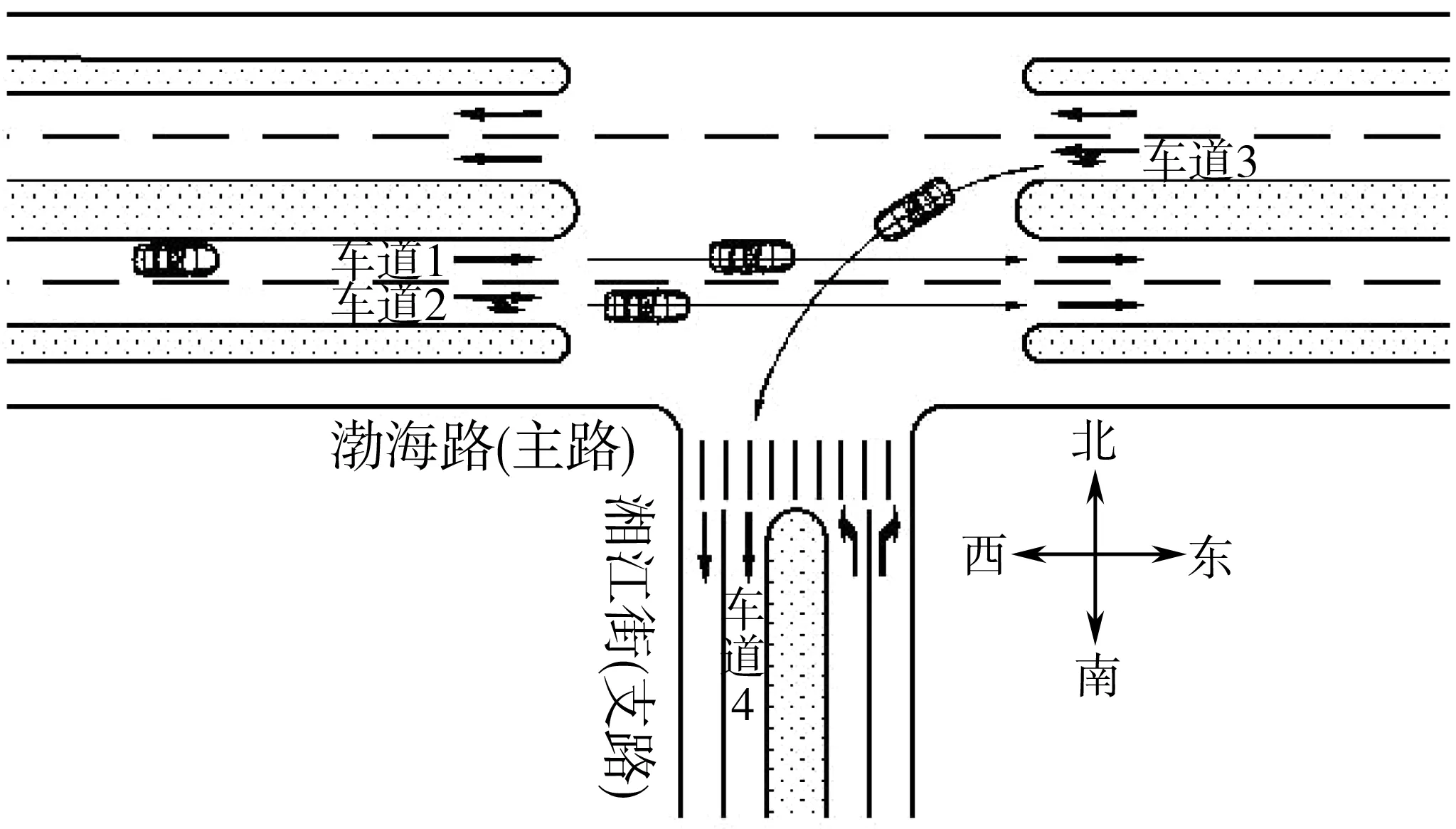
图1 交叉口示意Fig. 1 Schematic diagram of intersection
通过视频可观测到主路左转车辆驾驶员在经过交叉口时的不同驾驶行为。为便于模型建立,笔者将驾驶行为分为3种:保守型驾驶行为、稳重型驾驶行为和冒险型驾驶行为。对这3种驾驶行为建立起元胞自动机模型,从安全性与车流通行效率两方面分析不同左转驾驶行为对无信号T型交叉口主路交通流影响。图2为构建的T型无信号交叉口元胞模型。
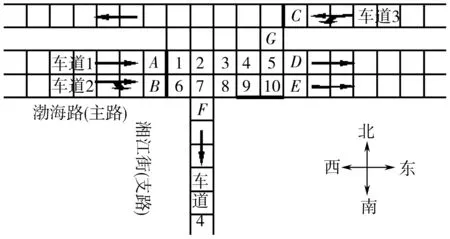
图2 交叉口元胞模型Fig. 2 Intersection cell model
图2中:粗实线为车辆由路段进入交叉口前的停车线,路段车辆行驶至停车线前,根据交叉口内部元胞占用情况和行驶规则采取对应的驾驶行为。
笔者主要研究的是T型交叉口主路左转车辆驾驶行为对主路对向直行车流的交通影响,在构建T型交叉口模型时,仅考虑主路左转车流与主路对向直行车流。主路左转车辆由车道3、元胞C驶入交叉口,左转通过元胞G-4-8进入车道4、元胞F驶出;主路内侧车道1的直行车辆通过元胞A驶入交叉口,直行通过元胞1-2-3-4-5进入元胞D驶出;主路外侧车道2的直行车辆通过元胞B驶入交叉口,直行通过元胞6-7-8-9-10进入元胞E驶出。
1.1 路段车辆行驶规则
路段元胞空间由长度为L的网格链组成,每一网格即代表一个元胞。小汽车车长为4~5 m,故将每个元胞长度设为5 m,即每辆小汽车占据一个元胞。主路长度由405个元胞组成,其中交叉口的东、西进口车道路段和道路均由200个元胞组成,对应道路实际长度为1 km。
在元胞空间中,将一个元胞的长度设为5 m,因此1元胞/时步对应的实际车速为18 km/h。由于元胞自动机为离散模型,仿真中的实际车速只能取最小车速的整数倍,因此当Vmax=4元胞/时步时,即对应的实际最大允许行驶速度为72 km/h。
路段元胞自动机模型根据NaSch模型(高速公路一维交通流元胞自动机模型)建立[14-15],模型包括:加速规则、减速规则、随机慢化规则和交叉口交界处规则。
1.1.1 加速规则
驾驶员在行驶时总是期望更快的速度,故认为在下个时步中,车速会在当前速度基础上增加1个单位。同时,车辆在加速过程中受最大车速Vmax限制,当车辆加速后的速度大于或等于Vmax,则认定车辆将以最大车速Vmax行驶,如式(1)。
v(t+1) = min[v(t)+1,Vmax]
(1)
式中:v(t+1)为t+1时刻车辆行驶速度。
1.1.2 减速规则
在减速过程中,考虑本车与前车之间的空元胞数量,记为d。将车辆前方空元胞数量d与通过加速规则得到的速度进行比较,选取较小值作为下个时刻车辆行驶速度,如式(2)。
v(t+1) = min[v(t+1),d]
(2)
1.1.3 随机慢化规则
随机慢化是指驾驶员在行驶过程中,会因某些随机因素(驾驶员心理状态、道路周围环境和天气等)而发生以一定概率进行减速的情况。p为随机慢化率,rand为随机产生的数,rand∈[0,1]。当p=0.3时,车速将降低一个单元,但降低后的速度不应小于0。如式(3)。
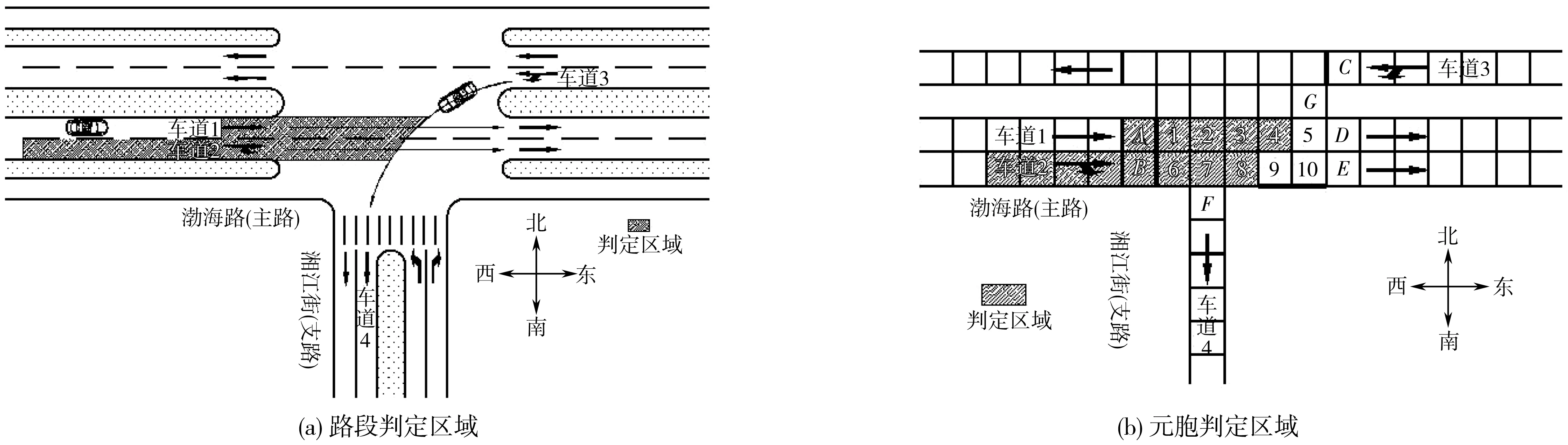
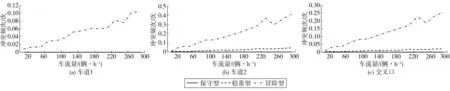
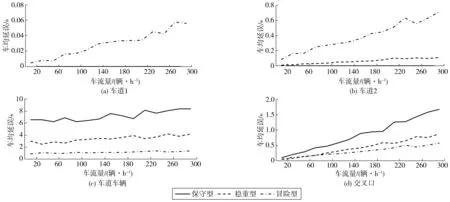
v(t+1)=max[v(t+1)-1, 0] (rand (3) 1.1.4 交叉口交界处规则 根据车辆安全行驶规定,当车辆即将到达交叉口时均需减速观察交叉口内车辆的行驶情况。因此当路段车辆即将到达交叉口停车线时,会考虑与交叉口停车线之间的空元胞个数,记为m。若车辆下一刻速度为v(t+1)>m,则令v(t+1)=m,有式(4)。 v(t+1)=min[v(t+1),m] (4) 在左转车辆通过无信号交叉口时,保守型驾驶行为注重与对向直行车辆的安全车距;冒险型驾驶行为在不违反交通法规前提下追求以最短时间通过交叉口;稳重型驾驶行为在追求更短时间通过交叉口同时还注重与对向直行车辆的安全车距。根据车辆安全行驶规定,当车辆临近交叉口时均需减速观察交叉口车辆行驶情况,结合视频观测与数据分析,规定左转车辆通过交叉口时速度为1元胞/时步,对应实际车速为18 km/h;直行车辆通过交叉口时速度最大为2元胞/时步,对应实际车速为36 km/h。 1.2.1 保守型驾驶行为 对保守型驾驶员而言,在进行左转之前,会观察更多的路段范围,考虑对向直行车辆行驶速度,在不影响对向直行车辆正常行驶情况下进行左转。因此保守型驾驶行为的左转车辆由车道3、元胞C左转进入元胞G,并在元胞G处对交叉口元胞进行判断。保守型判断区域如图3,当判定区域内路段无车辆行驶时〔图3(a)〕,即为图3(b)中判定区域内元胞为空元胞,元胞G处左转车辆取得交叉口通行权。 图3 保守型判定区域Fig. 3 Conservative judgment area 在保守型驾驶行为条件下,左转车辆将完全不会影响主路对向直行车辆的正常行驶。主路对向直行车辆行驶规则定义为:直行车辆通过交叉口时无需考虑交叉口内是否有左转车辆,只需以减速规则判断车辆前方空元胞数,确定下一刻行驶速度;交叉口内直行车辆无随机慢化行为;直行车辆驶出交叉口后按路段行驶规则继续行驶。 1.2.2 稳重型驾驶行为 对于稳重型驾驶员而言,当左转驾驶行为不影响主路内侧车道1的直行车辆正常行驶,且对主路外侧车道2的行驶车辆影响较小时,车辆将进行左转。因此稳重型左转车辆由车道3、元胞C左转进入元胞G,在元胞G处对交叉口元胞进行判断,图4为稳重型判定区域示意。当图4(a)中判定区域内无车辆行驶,即图4(b)中判定区域内元胞为空元胞时,元胞G处左转车辆取得交叉口通行权。 在稳重型驾驶行为条件下,可能会出现外侧直行车道2直行车辆在交叉口内减速让行左转车辆的情况。主路对向直行车辆行驶规则定义如下:内侧直行车道1车辆通过交叉口时无需考虑交叉口内是否有左转车辆,只需以确定性减速规则判断车辆前方空元胞数,确定下一刻行驶速度;外侧直行车道2车辆通过交叉口时,车辆在停车线元胞B处对交叉口内元胞进行判断,当交叉口内元胞6~8为空元胞,但元胞4被左转车辆占据时,元胞B处直行车辆以1元胞/时步驶入交叉口,为元胞4内左转车辆减速让行,否则只需以减速规则判断车辆前方空元胞数,确定下一刻行驶速度;交叉口内直行车辆无随机慢化行为;直行车辆驶出交叉口后按路段行驶规则继续行驶。 图4 稳重型判定区域Fig. 4 Steady judgment area 1.2.3 冒险型驾驶行为 对于冒险型驾驶员而言,当车辆左转行驶轨迹与对向直行车道停车线之间的交叉口内部元胞无直行车辆行驶时,车辆将进行左转。因此冒险型左转车辆由车道3、元胞C左转进入元胞G,在元胞G处对交叉口元胞进行判断,图5为冒险型判定区域示意。当图5(a)中判定区域内无车辆行驶,即图5(b)中判定区域内元胞为空元胞时,元胞G处左转车辆取得交叉口通行权。 在冒险型驾驶行为条件下,可能会出现内侧直行车道1的直行车辆在交叉口内因为左转车辆占据元胞4而减速行驶的情况或出现外侧直行车道2直行车辆在交叉口处减速甚至停车让行左转车辆的情况。主路对向直行车辆行驶规则定义如下:内侧直行车道1车辆通过交叉口时只需通过判断车辆前方空元胞数,确定下一刻行驶速度;外侧直行车道2车辆通过交叉口时,车辆在停车线元胞B处对交叉口内元胞进行判断,当交叉口内元胞6~8为空元胞,但元胞4被左转车辆占据时,元胞B处直行车辆以1元胞/时步驶入交叉口,为元胞4内左转车辆减速让行,当交叉口内元胞6~8为空元胞,但元胞G被左转车辆占据时,元胞B处直行车辆无论以1元胞/时步还是2元胞/时步驶入交叉口都会和元胞G内冒险型左转车辆发生冲突,故元胞B处直行车辆将为元胞G内左转车辆停车让行,当元胞G与元胞4内均无左转车辆时,元胞B处直行车辆只需以减速规则判断车辆前方空元胞数,确定下一刻行驶速度;交叉口内直行车辆无随机慢化行为;直行车辆驶出交叉口后按路段行驶规则继续行驶。 图5 冒险型判定区域Fig. 5 Adventurous judgment area 通过对所选交叉口进行车流数据分析,西进口车道1、2直行车流量均设为600辆/h,东进口车道3左转车流量从20辆/h开始,流量每次增加20辆/h,直到左转车流量等于300辆/h。对相同的左转车流量,分别采用保守型、稳重型和冒险型这3种驾驶行为进行模拟,时步取1 s,每次模拟1 000个时步,仿真选取运行200次以后的数据进行分析。 在对交叉口进行交通安全评价时,车辆冲突是一个重要指标。车均冲突频次是指在一次仿真中,平均每辆车发生的车辆冲突次数。车辆在驶入交叉口到驶出交叉口过程中,每当直行车辆为避免与左转车辆发生冲突而出现减速行为时,冲突次数加1。仿真结束后,将累计的冲突次数与累计通过的交叉口车辆数相除,得到车均冲突频次。为消除随机性影响,在相同条件下,进行10次模拟,取平均值作为最终结果。 延误是反映交通流运行效率的指标,进行延误分析可为制定道路交通设施改善方案,减少延误提供依据。车均延误计算如式(5)。 (5) 车辆通过交叉口的平均车速计算如式(6)。 (6) 随着主路左转车流量增加,分析不同左转车辆驾驶行为条件下主路直行车辆与左转车辆产生的车均冲突频次变化,如图6。 图6 车均冲突频次Fig. 6 Vehicle average conflict frequency 图6(a)为不同左转车辆驾驶行为条件下,车道1车辆与左转车辆的车均冲突频次。图6(a)表明:当左转车辆采取保守型和稳重型驾驶行为时,与车道1车辆无冲突;左转车辆采取冒险型驾驶行为时,将与车道1车辆发生冲突,且随着左转车流量增大,车道1车均冲突频次值总体呈上升趋势,车均冲突频次为0.008~0.102次。 图6(b)为不同左转车辆驾驶行为条件下,车道2车辆与左转车辆的车均冲突频次。图6(b)表明:当左转车辆采取保守型驾驶行为时,与车道2车辆无冲突;左转车辆采取稳重型与冒险型驾驶行为时,将与车道2车辆发生冲突,随着左转车流量增大,两种驾驶行为下的车道2车均冲突频次均呈上升趋势。保守型驾驶行为下的车均冲突频次为0.005~0.045次;冒险型驾驶行为下车道2车均冲突频次为0.012~0.410次。 图6(c)为不同左转车辆驾驶行为条件下,交叉口车均冲突频次。图6(c)表明:当左转车辆采取保守型驾驶行为时,对向车道车辆无冲突。左转车辆采取稳重型与冒险型驾驶行为时,将与对向车道车辆发生冲突;随着左转车流量增大,两种驾驶行为下的交叉口车均冲突频次均呈上升趋势。保守型驾驶行为下车均冲突频次为0.002~0.023次;冒险型驾驶行为下车道2车均冲突频次为0.010~0.255次。相比于稳重型驾驶行为,冒险型驾驶行为会导致交叉口产生更多的车辆冲突,且随着左转车流量增大,冒险型驾驶行为下车均冲突频次递增速度远大于稳重型驾驶行为。 由图6(a)、图6(b)可知:在冒险型驾驶行为下,车道1车均冲突频次为0.008~0.102次,冲突频次平均值为0.055次;车道2车均冲突频次为0.012~0.410次,冲突频次平均值为0.211次。冒险型驾驶行为导致的交叉口车辆冲突中,80%左右车辆冲突是由左转车辆与车道2(外侧直行车道)直行车辆产生的。这是因为当车辆进行左转时,需要先穿过车道1,再穿过车道2完成转弯。在整个转弯过程中,左转车辆对车道2车辆影响时间更长,从而导致左转车辆与车道2直行车辆产生更多冲突。 随着主路左转车流量增大,分析在不同左转车辆驾驶行为条件下,主路直行车辆与左转车辆产生的车均延误变化,如图7。 图7 车均延误Fig. 7 Vehicle average delay 图7(a)为不同左转车辆驾驶行为条件下,车道1车辆的车均延误。图7(a)表明:当左转车辆采取保守型和稳重型驾驶行为时,车道1车辆没有延误。左转车辆采取冒险型驾驶行为时,车道1车辆产生延误,且随着左转车流量增大,车道1车均延误值总体呈上升趋势,车均延误为0.006~0.058 s。这与图6(a)结果一致,当左转车辆采取保守型和稳重型驾驶行为时,不会与车道1车辆发生冲突,因此车道1车辆不会产生延误;左转车辆采取冒险型驾驶行为时,将与车道1车辆发生冲突,因此车道1车辆产生延误。 图7(b)为不同左转车辆驾驶行为条件下,车道2车辆的车均延误。图7(b)表明:当左转车辆采取保守型驾驶行为时,车道2车辆没有延误。左转车辆采取稳重型与冒险型驾驶行为时,车道2车辆将产生延误;随着左转车流量增大,两种驾驶行为下车道2车均延误均呈上升趋势。保守型驾驶行为下车道2车均延误为0.009~0.108 s;冒险型驾驶行为下,随着左转车流量增大,车道2车均延误为0.084~0.710 s。 图7(c)为不同左转车辆驾驶行为条件下,左转车辆的车均延误。图7(c)表明:在左转车辆保守型驾驶行为下,左转车辆车均延误波动为6.228~8.378 s;在稳重型驾驶行为下,左转车辆车均延误波动为2.480~4.199 s;在冒险型驾驶行为下,左转车辆车均延误波动为0.876~1.372 s。保守型驾驶行为下的左转车辆车均延误最高,冒险型驾驶行为下左转车辆车均延误最低。随着左转车流量增大,这3种驾驶行为下的车均延误均呈上升趋势。这是因为随着左转车流量增大,左转车辆在转弯时的排队概率随之增加,即第1辆左转车辆在交叉口等待通过时候,第2辆左转车辆已到达交叉口,从而在第1辆左转车辆后面排队等待。 图7(d)为不同左转车辆驾驶行为条件下的交叉口车均延误。图7(d)表明:随着左转车流量增大,这3种驾驶行为下交叉口车均延误均呈上升趋势。当左转车流量相同时,保守型驾驶行为下交叉口车均延误一直大于另外两种驾驶行为的;随着左转车流量增大,保守型驾驶行为下的交叉口车均延误增长速度也大于另外两种。对于稳重型和冒险型驾驶行为而言,当左转车流量小于80 pcu/h时,稳重型驾驶行为下的交叉口延误略小于冒险型驾驶行为下的延误值;当左转车流量大于80 pcu/h时,稳重型驾驶行为下的交叉口延误大于冒险型驾驶行为下的延误,且随着车流量增大,两种驾驶行为下的交叉口延误值差距逐渐增大。这是由于当左转车流量较低时,相比稳重型驾驶行为,冒险型驾驶行为会导致左转车辆与对向直行车辆产生更多冲突,使得直行车辆产生更多延误,随着左转车流量增大,冒险型驾驶行为下,左转车辆车均延误低优势更加明显,使得在冒险型驾驶行为下的交叉口车均延误逐渐低于稳重型驾驶行为下的延误。 笔者通过建立元胞自动机无信号T型交叉口交通流模型,对比分析了交叉口主路不同左转车辆驾驶行为对交叉口车辆车均冲突频次与延误影响。模型中将左转车辆驾驶行为分为保守型、稳重型和冒险型,仿真分析表明不同驾驶行为会对交叉口交通流产生不同影响。 1)在保守型驾驶行为条件下,左转车辆不会与主路车道的直行车辆发生冲突,主路车道直行车辆通过交叉口时不会产生延误,但会导致左转车辆通过交叉口时产生车均延误远大于另外两种驾驶行为下的车均延误。因此当左转车流量相同时,保守型驾驶行为下的交叉口车均延误一直大于另外两种驾驶行为。随着左转车流量增大,这3种驾驶行为下交叉口车均延误均呈增长趋势,且保守型驾驶行为下的交叉口车均延误增长速度更快。 2)对稳重型和冒险型驾驶行为而言,在交叉口车辆冲突方面,冒险型驾驶行为会导致交叉口产生更多的车辆冲突,且随着左转车流量增大,冒险型驾驶行为下交叉口车均冲突频次增长速度更快。在交叉口车均延误方面,当左转车流量较低时,冒险型驾驶行为下的交叉口延误值高于稳重型驾驶行为下的延误值,这是由于当左转车流量较低时,冒险型驾驶行为会导致左转车辆与对向直行车辆产生更多冲突,使得直行车辆产生更多延误。随着左转车流量增大,冒险型驾驶行为下,左转车辆车均延误低的优势更加明显,使得在冒险型驾驶行为下的交叉口车均延误逐渐低于稳重型驾驶行为下的延误。 3)在无信号T型交叉口,当主路左转车流量较低时,保守型驾驶行为下,交叉口延误主要由左转车辆产生,且左转车辆排队概率较低,对交叉口主路直行车辆影响较小。当主路左转车流量较大时,保守型驾驶行为会导致交叉口延误大大增加,冒险型驾驶行为会导致交叉口车辆冲突大大增加,稳重型驾驶行为在有效降低交叉口延误同时,其车辆冲突频次远小于冒险型驾驶行为下的频次。因此,当左转车流量较低时,保守型驾驶行为更有利于无信号T型交叉口交通流运行,当左转车流量较高时,稳重型驾驶行为更有利于无信号T型交叉口交通流运行。1.2 交叉口处车辆行驶规则

2 数值模拟与结果分析
2.1 车辆冲突与延误


2.2 交叉口车均冲突频次分析
2.3 交叉口车均延误分析
3 结 论
