基于Arduino的磁编码器轴角解算系统设计
2022-02-25曹广忠梁芳萍孙俊缔
赵 磊,曹广忠,梁芳萍,孙俊缔,胡 勇,王 芸
(1.深圳大学机电与控制工程学院,广东 深圳 518060;2.深圳市四方电气技术有限公司,广东 深圳 518126)
0 引言
磁编码器是一类新型的位移检测传感器,采用磁敏感元件感应磁极运动产生的磁场变化,通过元件产生的磁电阻效应,测量运动物体的位移变化[1-2]。磁编码器结构简单、紧凑,以其抗干扰能力强、响应速度快、体积小和成本低等特点而被广泛应用于伺服系统中[3-5]。角位置闭环控制伺服系统,如机器人关节、数控机床、雷达跟踪系统等,需要快速反馈得到精确的角位置,才能使伺服控制系统具有快速、高精度的瞬态响应[6-7]。因此,轴角解算是磁编码器研究中的重要环节。
近年来,国内外对磁编码器的研究重点主要集中在对其信号处理(即轴角解算方法)上[6]。目前,常用的轴角解算方法有反正切法、标定查表法和锁相环(phase locked loop,PLL)法[8-9]。其中,反正切法应用较广泛。该方法通过对2路正余弦信号进行反正切运算得到轴角[10],但计算反正切函数和除法运算都耗费了非常多的资源。因应用反正切法解算轴角系统为开环系统,易受外界环境因素的干扰而产生较大误差[10-12],故反正切法不利于求解位置角度的实时运算。标定查表法对电压信号与电机运动角度进行标定,并把角度数据存储在可擦除可编程存储器中。工作过程中,根据磁编码器输出的电压信号,分区间查表即可得到电机旋转的角度值。但此方法会消耗大量的储存单元,并且对磁栅的质量和信号的准确度要求非常苛刻[13-14]。采用锁相环法解算轴角的方案中,绝大多数使用的是数字信号处理器(digital signal processor,DSP)或嵌入式单片机(STMicroelectronics,STM32)自带的数模转换(analogue-to-digital conversion,ADC)采样模块对信号进行采样。但是,该方法存在两方面不足:①DSP和STM32内部硬件结构较复杂;②DSP和STM32的ADC模块达不到系统所需的采样精度[15-21]。而Arduino相对结构简单,易于编程,且能够外接ADC采样模块。综合以上原因,本文研究了基于Arduino的磁编码器轴角解算系统。
1 磁编码器工作原理
霍尔式磁编码器结构如图1所示。

图1 霍尔式磁编码器结构
霍尔式磁编码器是一种基于电磁感应原理的角位置传感器,通过电磁感应将角度位置、角速度和旋转速度等物理信号转变为磁场强度、电压等电信号,供后续测量处理[22]。本文设计的霍尔式磁编码器主要包括3个部分:信号发生部分、信号处理部分以及上位机。图1中,h为磁极与霍尔元件组件之间的距离。
霍尔元件组件由2个呈正交安装在磁极下方的霍尔传感器组成。当磁极与电机轴同步旋转时,将产生同步变化的旋转磁场。由霍尔效应可知,对霍尔传感器通电后,当电流垂直于外磁场通过半导体即霍尔传感器时,载流子发生偏转,垂直于电流和磁场的方向会产生附加电场,从而在霍尔传感器的两端产生电势差。霍尔效应原理如图2所示[23-24]。

图2 霍尔效应原理
由霍尔效应可知,当达到平衡状态(即电场力等于洛伦兹力)时:

(1)
电流为:

(2)
由式(1)与式(2)可得霍尔电压,为:

(3)
式中:Fe为半导体两端的电场力;F为洛伦兹力;q为单位带电粒子的电荷量;U为霍尔电压;L、W、H分别为半导体的长、宽、高;v为带电粒子的速度;B为磁感应强度;I为电流;Q为带电粒子总电荷量;t为时间;n为带电粒子浓度;Rh为霍尔系数。
电机转动一周,磁栅也随之转动一周,磁敏元件检测到由磁栅转动引起的磁场变化,输出工路呈周期变换的正余弦模拟信号[23-26]。然后,将2路正余弦信号传送至后续的信号处理电路中解算轴角。
2 系统硬件设计
2.1 硬件总体框架
系统硬件主要由信号发生部分的霍尔传感器、带有17位分辨率光电编码器的伺服同步电机,信号处理部分的16位ADC采样模块ADS1115、Arduino以及上位机组成。硬件平台如图3所示。

图3 硬件平台
2.2 霍尔传感器
AH3503霍尔传感器是一款模拟信号输出的霍尔集成电路,输出电压在一定磁场强度范围内随着磁场的增强而线性增大。当磁场强度超出该范围持续增强时,其输出电压会呈非线性增大直至饱和。传感器芯片内置有反向电压保护器、电压调整器、温度补偿电路、霍尔电压发生器、信号放大器等电路单元。性能优良的电压调整器和温度补偿电路,可确保传感器在较宽的电压范围和温度范围内稳定地工作。反向电压保护电路避免了传感器受到反向电压的损伤。磁场强度B和电压U之间的磁电转换特性曲线如图4所示。

图4 磁电转换特性曲线
2.3 Arduino单片机
本设计采用了Arduino UNO单片机。该单片机有14路数字输入/输出端口(其中6个可以作为脉冲宽度调制输出)、6路模拟输入端口,以及USB连接口、电源接口、在线串行编程(in-circuit serial programming,ICSP)端口和复位按钮。Arduino结构简单,是一款便捷灵活、方便上手的开源电子原型平台,编程相对容易,运算速度块,适用于本系统。
2.4 ADS1115采样模块
ADS1115是一款小型、低功耗、16位精度Δ∑数模转换器。ADS1115由1个内部基准电源、输入多路复用器、1个时钟振荡器和1个内部整合电路(inter-integrated circuit,I2C)接口组成。ADS1115可以测量4个单端信号或2个差分信号。本设计采用2路并行采样。ADS1115功能框图如图5所示。

图5 ADS1115功能框图
3 系统软件设计
本设计采用了2个霍尔芯片。霍尔芯片感应到磁场的变化,产生2路正余弦电压。霍尔芯片输出电压信号如图6所示。
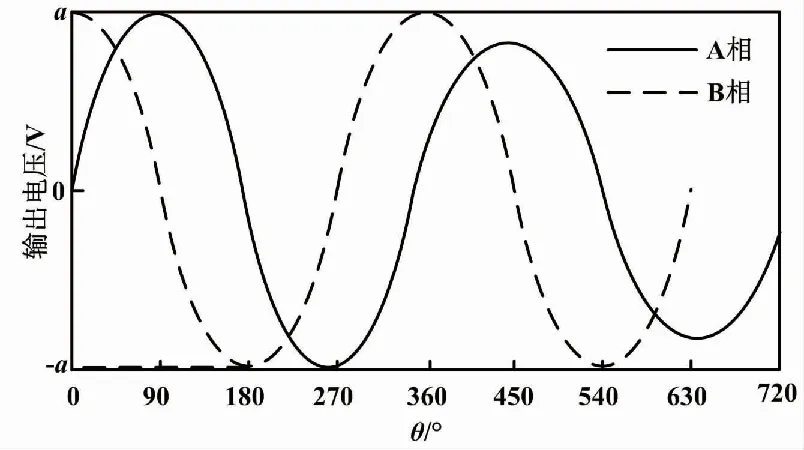
图6 霍尔芯片输出电压信号
2路正余弦信号经ADS1115采样模块采样后给Arduino,分别用反正切法和锁相环跟踪法进行轴角解算。系统软件设计主要是对反正切法和锁相环跟踪法进行编程。
3.1 反正切法
根据图6,2路输出信号可表示为:

(4)
式中:Um为输出电压的幅值;θ为伺服电机轴的角位移;UA与UB为霍尔芯片的输出电压。
利用反正切函数,可求取伺服电机轴的角位移[23-24],如式(5)所示。
(5)
根据以上分析,反正切法编程流程如图7所示。

图7 反正切法编程流程
3.2 锁相环法
锁相环法是一种利用相位同步产生的电压去调谐压控振荡器,以产生目标频率的负反馈控制系统。其利用外部输入的参考信号控制环路内部振荡信号的频率和相位,实现输出信号频率对输入信号频率的自动跟踪。将磁编码器检测输出的sinθ、cosθ作为锁相环的输入信号,与其输出反馈的2路信号通过相乘器、减法器进行相位比较,得到误差δ。对于很小的位置变化量,即δ=θ-φ趋近于0时,有:

(6)
本文设计采用二阶锁相环。环路滤波器由比例积分(proportional integral,PI)控制器构成。压控振荡器由积分环节构成。将δ代入PI控制器。负反馈的目的是将位置变化量减小到零。同时,通过PI控制器建立了1个二阶低通滤波器。该滤波器是对位置变化量滤波而非直接对正余弦信号滤波,极大地抑制了噪声。锁相环算法原理如图8所示[15]。

图8 锁相环算法原理图
简化的锁相环算法原理如图9所示。

图9 简化的锁相环算法原理图
由图9可以求出系统的开环传递函数,为:

(7)
根据系统的开环传递函数可以求出系统的Z传递函数,为:

(8)
对式(8)进行反Z变换,得到差分方程:
(9)
根据以上分析,锁相环法编程流程如图10所示。

图10 锁相环法编程流程图
4 仿真验证
4.1 MATLAB仿真
为验证算法的可行性、计算误差,对比2种方法的差异以及调整相关参数,在MATLAB中进行了仿真试验。反正切法和锁相环法解算轴角的试验仿真如图11所示,试验结果如图12所示。

图11 试验仿真示意图

图12 试验结果
由图11、图12可知,反正切法能有效跟踪轴角变化,但由于电机转动角度周期性变化,其误差在电机由360°转到0°时会跳变。将反正切法解算结果与理论角度作对比。对比结果表明,采用反正切法解算轴角的误差会随着时间的推移而缓慢变大。锁相环跟踪算法也能有效跟踪轴角变换,但其对于角度输入的稳态误差趋近于0,收敛时间在10 ms以内。
4.2 试验验证
试验所用平台上安装了2台对拖的伺服电机(左侧电机安装有自制的磁编码器,右侧电机安装有17位绝对式的光电编码器),通过控制伺服电机所转角度对比试验结果,从而得到相应误差。为了验证本系统的可行性以及对比反正切法和锁相环法的测量精度,对1个旋转周期的不同角度进行了测量。磁编码器输出电压信号如图13所示。

图13 磁编码器输出电压信号
试验测量结果如表1所示。

表1 试验测量结果
由表1可知:采用反正切法测量90°和180°,解算得到的轴角平均值分别为90.62°和180.14°;采用锁相环法测量90°和180°,解算得到的轴角平均值分别为90.24°和180.02°。反正切法和锁相环法在实际应用中都能有效测量出轴角。通过测量1个旋转周期内不同的角度,对比发现,反正切法的平均测量相对误差为0.4%,锁相环法的平均测量相对误差为0.11%。
5 结论
本文基于Arduino,设计了磁编码器的轴角解算系统。该系统中采用了外围独立高精度16位ADC采样模块ADS1115对正余弦信号进行采样,通过反正切法和锁相环法分别实现了轴角的测量。试验表明,反正切法和锁相环法在工程实际中均能有效测量轴角,但锁相环法相对于反正切法测量轴角误差更低。本系统硬件结构简单、成本较低且锁相环法测量误差小,适用于实际工程中。
