构架式可展开天线反射器模块化构型设计优化
2022-02-24胡飞宋燕平黄志荣李怡晨马小飞李婉
胡飞,宋燕平,黄志荣,李怡晨,马小飞,*,李婉
1. 中国空间技术研究院西安分院,西安 710100 2. 陕西科技大学 电子信息与人工智能学院,西安 710100
1 引言
构架式空间可展开天线是一种由多基本单元组合而成的大型桁架结构[1],在航天领域应用较为广泛,具有收纳比高、精度高、结构稳定性好等特点。通过改变基本单元连接形式可灵活构造桁架结构系统,可满足不同天线反射面的设计要求[2]。目前已有多个大型构架式可展开天线成功应用于空间探索。
天线构型设计是可展开天线相关理论研究中较基础的研究问题。由于构架式可展开天线反射器属于空间多链路耦合机构,其构型综合难度较大,需从本质出发,对可展开天线构型进行综合和分析,提高可展开天线的结构性能和运动协调性。空间多链路耦合机构的构型综合主要有四类方法:图论、几何法、位移群论和螺旋理论。Warnaar借助于图论的方法首次对空间可展开机构进行了系统的综合[3,4],并在自由度计算公式列举法的基础上提出了关节铰链的分配方法。对于简单可展Bennett机构[5, 6]、Myard机构[7]和Bricard机构[8],Li用几何参数法解释了上述简单机构的能动性,发现了一些新颖的可展机构[9]。Herné通过位移集(群)的非空子集(复数)表示任意一组刚体位置,表征了给定机构的任何一对刚体之间的连接方式[10]。Liu根据四面体单元的多链路耦合特性,构造了四面体单元的等效机构,化简了多单元组成的构架式天线结构,获得了全R四面体单元构架反射器机构的自由度[11]。
上述文献对多链路耦合机构的构型进行了分析研究,特别是针对四面体单元构架式天线研究较多,如图1所示。由于四面体单元构架式天线杆件及花盘等构件众多,且各同步杆长度不等长,因此现阶段构架式天线模型设计步骤较为复杂[12]。另一方面,四面体单元构架式天线机构自由度多,在各同步杆中心铰链处添加扭簧来驱动天线展开[13]。由于驱动能量巨大,造成天线展开不可控的现象,这给天线的展开可靠性带来巨大的不确定性。因此,结合构架式可展开天线的发展趋势,需设计一种自由度较少的模块化构架式天线,既能满足收纳比(工作表面的投影在展开与收拢完全时面积的比值)大,又能满足可控展开的特点。
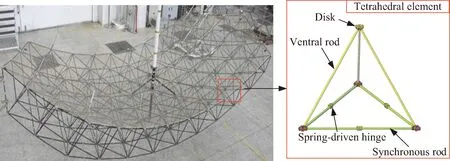
图1 四面体单元构架式天线Fig.1 A truss antenna composed of tetrahedral elements
2 模块化构架天线结构设计
2.1 基本模块选择
大型构架式可展开天线主要采用模块组合思想,首先应确定模块结构与构型。为保证模块结构简单,需满足两个设计要求:1)模块为单自由度可展机构;2)模块具有封闭的桁架结构,提高整体刚度。传统的构架式可展天线由四面体单元组合而成,在构型为3RR-3RRR的四面体单元可展机构基础上,利用3个构型为3RR-3RRR四面体单元共用一个花盘的特点构建平面模块,同时要求桁架结构是封闭的,模块构型为3(3RR-3RRR)-3RRR-3RRR,如图2所示。此模块机构的自由度为1[14],即只需一个驱动可使模块由收拢状态变为展开状态,可称之为单自由度模块。
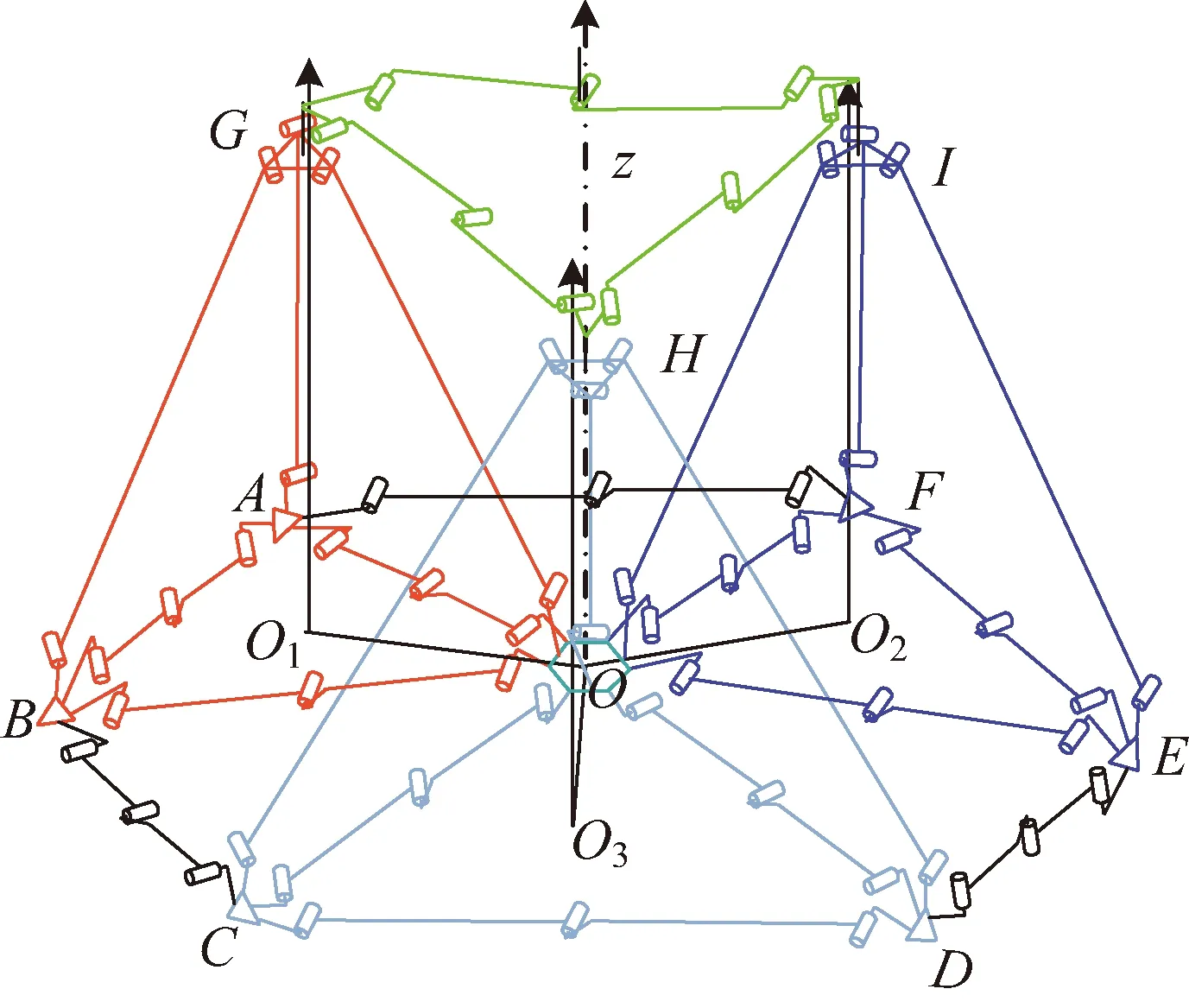
图2 3(3RR-3RRR)-3RRR-3RRR模块Fig.2 3 (3RR-3RRR)-3RRR-3RRR module
2.2 反射面几何结构设计
四面体单元构架式天线采取各单元共用花盘的连接组网形式,而模块化构架式天线采用花盘与花盘连接的组网形式,由相同构型的模块拼接组装形成,如图3所示。模块化构架式天线反射面为球面或抛物面,网格划分由正六边形模块组成,所有模块的构型相同,且单个模块由3个相同构型的四面体单元组成,并且组成单个模块的3个四面体单元尺寸相等。
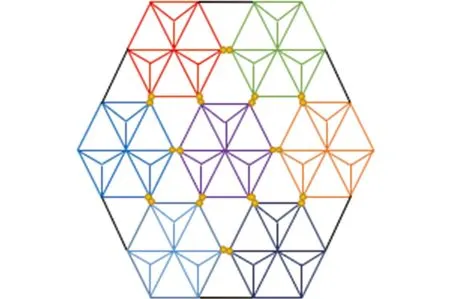
图3 模块化构架天线反射器Fig.3 Module networking
若两圈六边形节点都在同一个球面O上,形成球面反射器,设球面半径为R,中心模块正六边形①的边长为l1,周边模块正六边形②的边长为l2。对球面反射器进行正视投影和俯视投影,如图4所示。
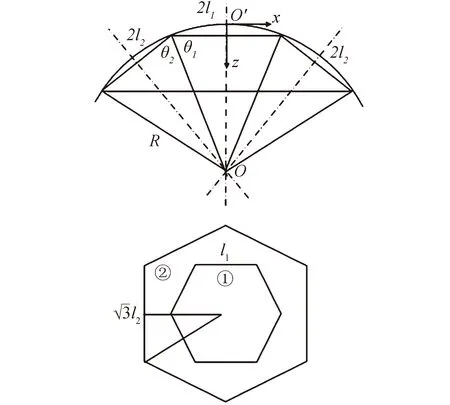
图4 正视投影和俯视投影Fig.4 Orthographic projection and downward projection
当周边模块正六边形②的边长与中心模块正六边形①的边长满足下列关系:

(1)


已知被拟合的模块化构架式天线反射面的焦距为p=1 000 mm,根据最小二乘法[15]求得的拟合球面半径为R=3 000 mm,拟合球面方程表达式为:

(2)


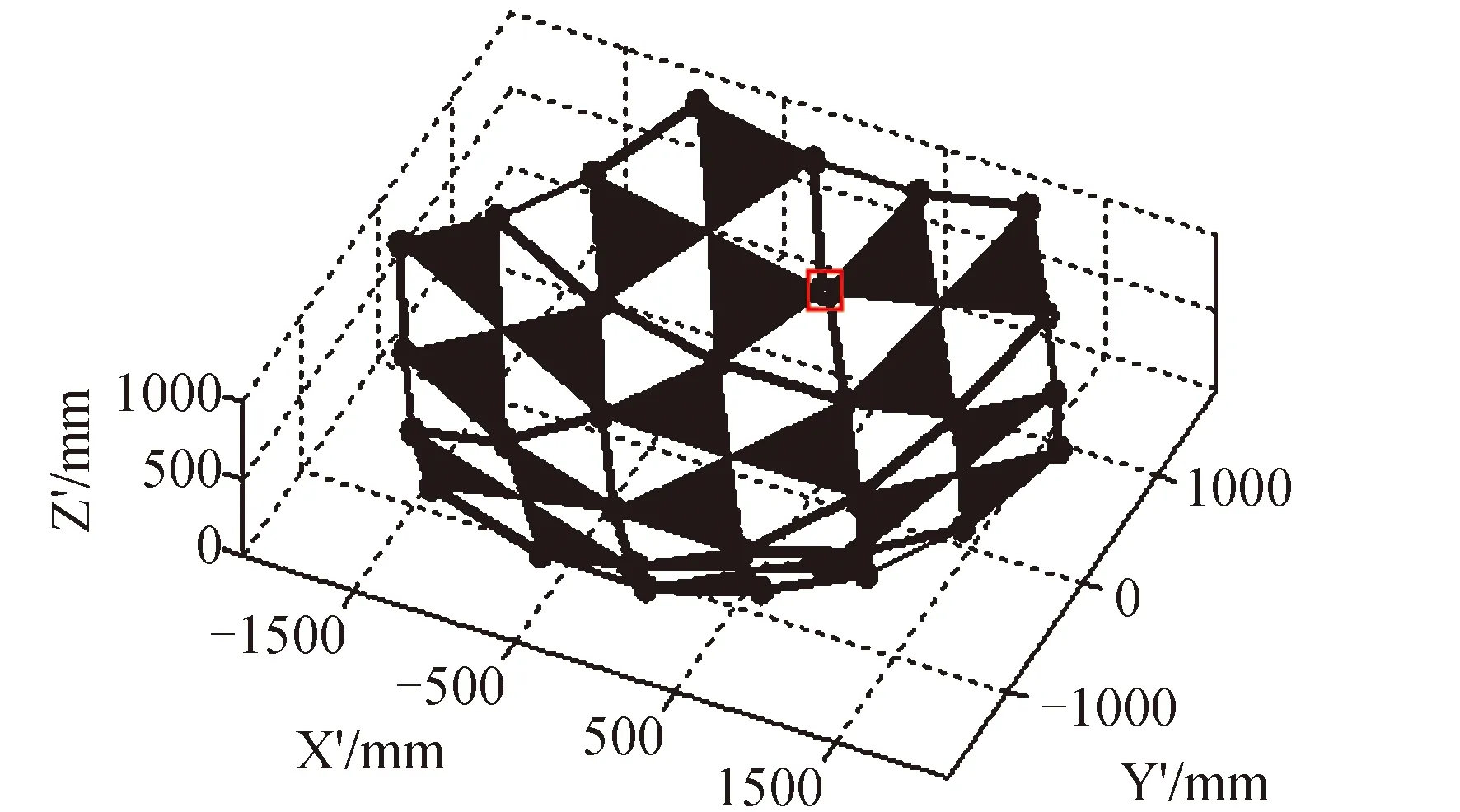
图5 模块化构架式天线反射器Fig.5 Modular truss antenna reflector
3 多模块构型设计
模块间的连接不再采用共用花盘的方式,而是采用花盘与花盘相连接的方式,即在模块间的两花盘间添加某种运动副。为了保障天线正常展开至工作状态,对模块化构架式可展开天线构型机理必须给予充分研究。首先在模块间添加转动副(R)的连接方式,从图6中可以看出三个相邻的任意模块组合为一个复杂的多环耦合结构,为简化模型,取出三模块组成的闭环机构,构型为3(7R)-3R,如图7所示。
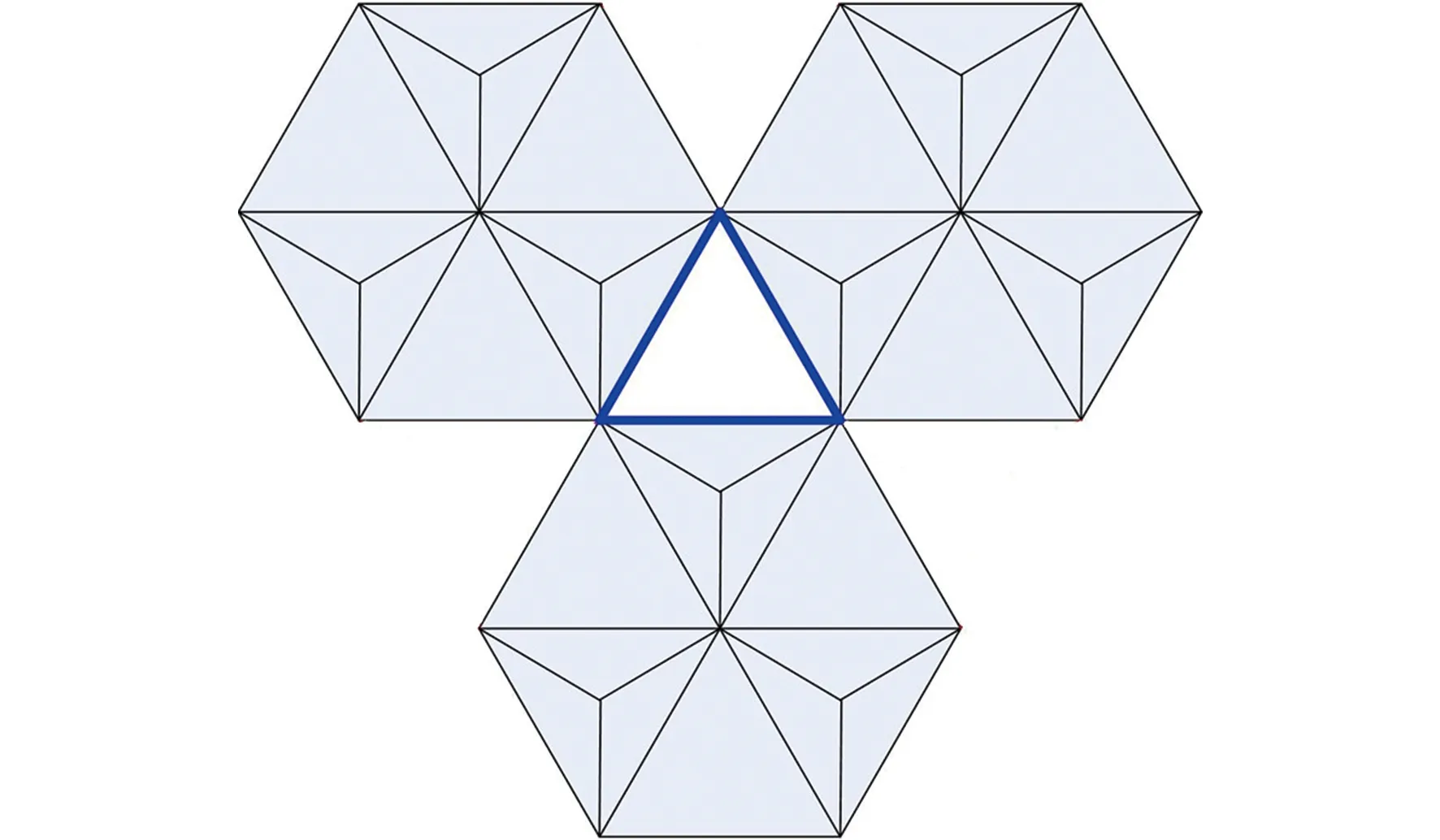
图6 多模块组合单元Fig.6 Multi-module unit
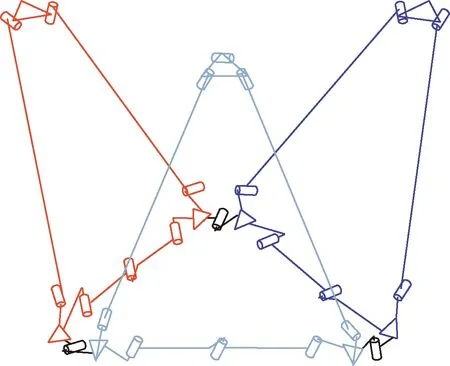
图7 3(7R)-3R机构Fig.7 3(7R)-3R mechanism
采用等效法[16-18],对图7所示的耦合机构进行分析。首先考虑由腹杆和同步杆组成的单闭环机构7R,如图8所示。单闭环机构可看成两条链组成的并联机构:一条支链为S1-S2-S3-S4-,另一条支链为S5-S6-S7-。花盘C为动平台,花盘D为定平台。
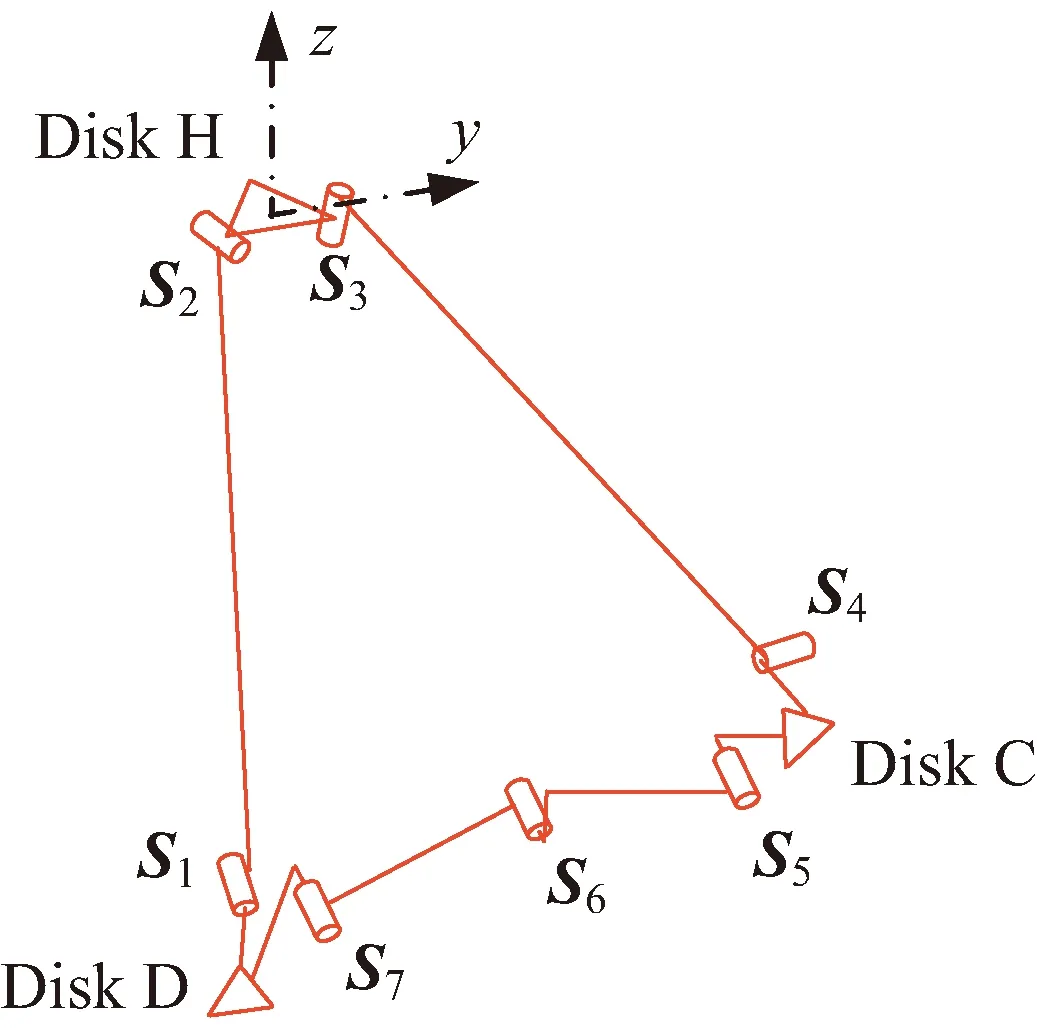
图8 单闭环机构Fig.8 single closed-loop mechanism

(3)
式中:S1、S2、S3、S4铰链中心位置的坐标分别为P1(xjyjzj)、P2(xiyi0)、P3(xi-yi0)、P4(xj-yjzj)。
根据螺旋理论可知支链的运动螺旋和约束螺旋的互易积为0,即:
S/m∘S/r=0
(4)
式中:S/m为运动螺旋,S/r为约束螺旋,“∘”代表两旋量的互易积符号。
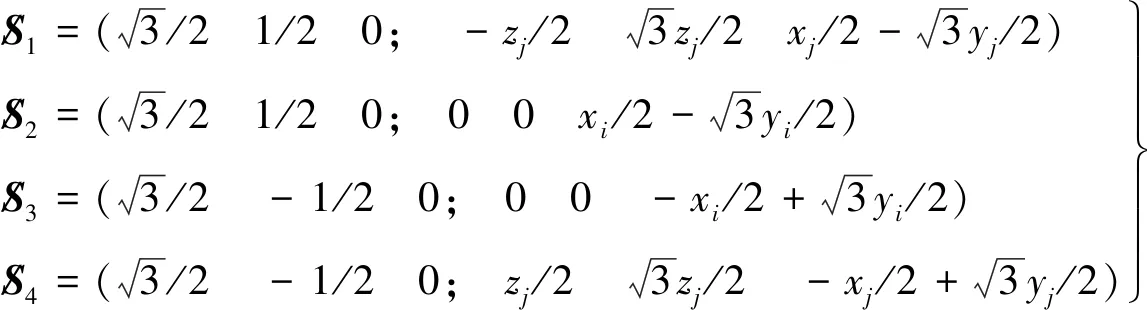
可通过求上述螺旋的反螺旋可得S1-S2-S3-S4-支链提供给花盘C的约束螺旋。求得的约束螺旋系为:
(5)
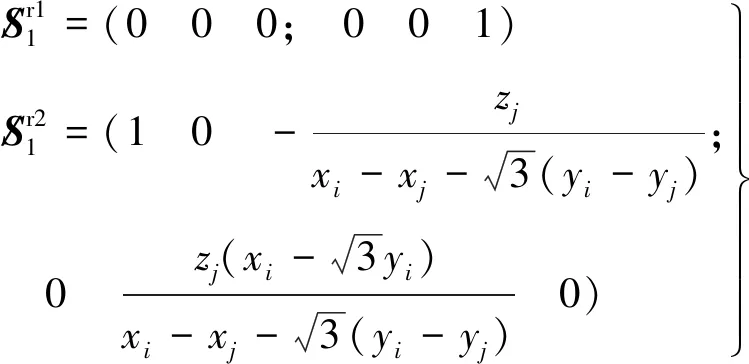
支链S5-S6-S7-的运动螺旋系为:
(6)
式中:S5、S6、S7铰链中心位置的坐标为P5(xkykzk)、P6(xmymzm)、P7(xk-ykzk)。
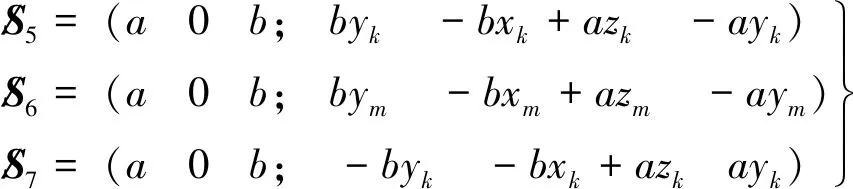
求得支链S5-S6-S7-的约束螺旋系为:
(7)

(8)
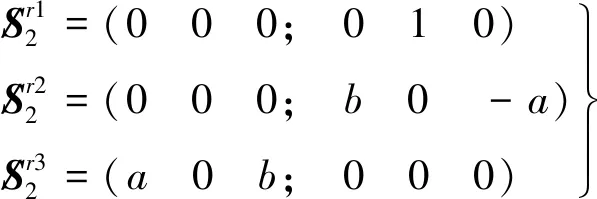
求得花盘C的等效运动螺旋为:

(9)
由此可知花盘C在天线收展时是沿着矢量方向(0 1 0)移动的即沿着y轴运动,闭环机构可等效为一个花盘C与花盘D连线方向上的移动副。同理可知,另两个由腹杆和同步杆组成的闭环机构也可等效为移动副,则图7可转化为图9。
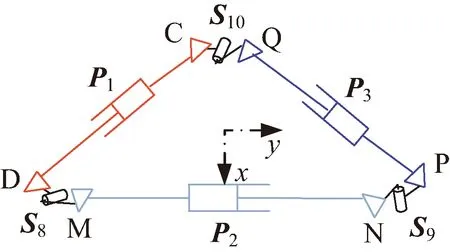
图9 三模块等效机构Fig.9 Three-module equivalent mechanism
将图9中相近的两花盘及相连的转动副(R)看作为一个广义花盘,则图9转化为两支链并联机构:支链P1-P2-和支链P3-,如图10所示,动平台为B′,定平台为C′。由于3个移动副(P)的方向轴线处于同一平面,以三模块形成曲面的中心点为原点,3个移动副(P)的方向轴线组成的平面的法线方向为z轴,移动副P2的轴线方向为y轴,建立坐标系。
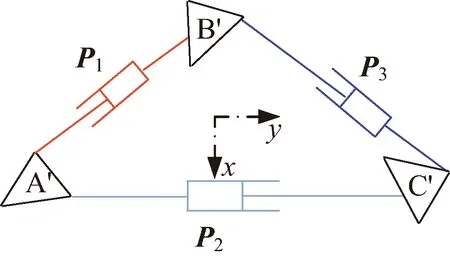
图10 3P并联机构Fig.10 3P parallel mechanism
支链P1-P2-的在空间坐标系中的运动螺旋系为:

(10)
式中:(D1E10)、(0 1 0)分别为移动副P1、P2的运动方向。
则此支链的约束螺旋系为:
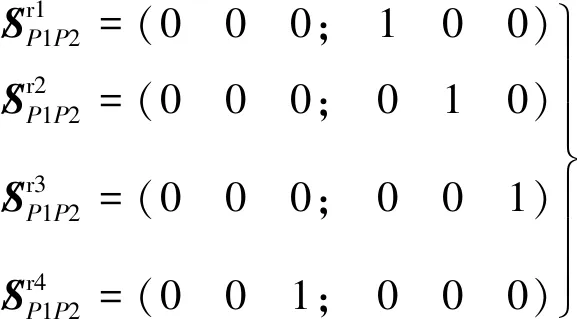
(11)
支链P3-的在空间坐标系中的运动螺旋为:
S/P3=(0 0 0;D3E30)
(12)
式中:(D3E30)为移动副P3的运动方向。 则此支链的约束螺旋系为:
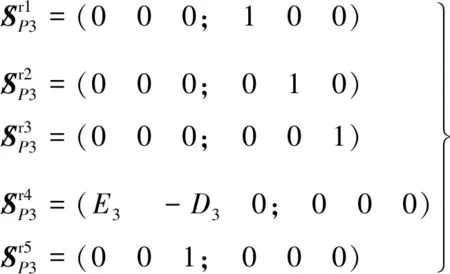
(13)
由式(11)与式(13)可知,图10中所示机构的公共约束螺旋为:
(14)
则动平台受到支链与支链提供的公共约束力有4个,即λ=4,则机构的阶数为:
d=6-λ=2
(15)
根据修正的Kutzbach-Grübler公式[19]可求得等效机构自由度。
2(3-3-1)+3+0-0=1
(16)
式中:n表示机构杆件数目;g表示运动副数目;fi表示第i个运动副的相对自由度数;v是多环并联机构在去除公共约束的因素后的过约束的数目;ζ是机构中存在的局部自由度。
对式(11)、式 (13)同时求反螺旋,可得广义花盘B′等效运动螺旋为:

(17)
该螺旋表示沿着P3支链移动副轴线方向移动,表明了广义花盘B′和广义花盘C′能够沿着固定方向相对运动。
综上分析可见,图6中三个模块可实现同步的收拢展开运动,可以表征整体桁架机构收展运动的关联性,满足收展的期望运动。
4 花盘调姿构型优化
构架式天线的模块通过转动副(R)连接,由式(17)可知,机构收展的自由度为1。当模块化构架式天线收展时,同一模块上花盘朝着另一花盘移动,但是两花盘的姿态没有发生变化。这样就造成了天线在收拢后,不同模块的花盘姿态不一样,各模块的中心轴线依然垂直于天线展开时抛物面(工作表面)的切平面,使收纳比较小。此时需要靠杆件变形及铰链间隙等将背面或反射面上节点强制收拢到完全收拢状态,容易对天线结构造成破坏,无法适应可展开天线的发展。考虑到平台的安装及金属网的管理,要求在收拢后所有花盘姿态最好是水平的,即天线收拢后达到最大收纳比,若在收拢过程中模块能绕模块间花盘连接节点摆动,可使各模块机构的中心轴线转换到相互平行的位置。因此,需要在模块间花盘连接处添加花盘姿态调整的自由度,使花盘姿态在运动过程中能够发生偏转。
图9中以C花盘为动平台,以Q花盘为定平台,则支链分别为P1-S8-P2-S9-P3-和S10-。支链P1-S8-P2-S9-P3-的运动螺旋系为:
(18)
式中:(H1I1J1)、(H2I2J2)分别为转动副S8、S9的轴线方向,且铰链中心位置的坐标分别为(x8y8z8)、(x9y9z9)。

(19)

综上,可在P1-S8-P2-S9-P3-约束支链上添加两个转动副(R)或一个转动副(R)和一个移动副(P)。球面副(S)可用3个转动副(R)代替,万向副(U)可用两个转动副(R)代替,圆柱副(C)可用一个移动副(P)和转动副(R)代替,则支链P1-S8-P2-S9-P3-转化为PUPUP、PSPRP、PUPCP,如图11所示。
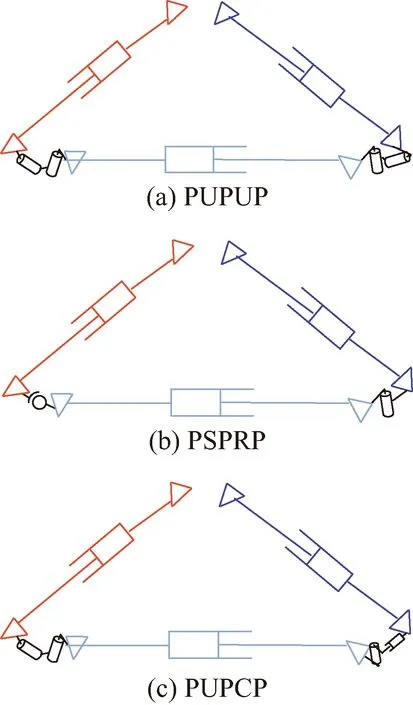
图11 支链构型优化Fig.11 Configuration optimization
考虑结构设计的方便及可实现性,采用PUPUP约束支链。为使C花盘和Q花盘也有相对摆动,同样在花盘间添加一个转动副(R)后转化为万向副(U),如图12所示。该机构某一模块的花盘能够绕与其连接的万向副(U)轴线转动,从而模块的花盘能够实现有调姿的自由度。如此,在模块构架式天线收拢后,花盘调姿摆平,模块化构架式天线可达到最大收纳比。
图12 模块连接构型Fig.12 Module connection configuration
综上所述,优化后的等效机构为闭环机构,既满足收拢的期望运动,又满足花盘调姿的期望运动。此等效机构调姿的自由度为3,收拢自由度为1,则三模块组成结构的自由度为4。当7模块拼接组网时,形成了6个闭环机构。6个闭环机构由于中心模块的耦合作用,6个小闭环机构形成了单闭环空间机构,过约束的数目v=1,机构中存在的局部自由度ζ=5,则模块组网天线自由度为:
6(6-6-1)+3×6+1-5=8
(20)
由式(20)可知模块化构架式天线为8自由度机构。各模块的背面层需通过连接支链连接,使得桁架系统结构完整,刚度提高。背面层模块连接机构采用6自由度的SRS支链连接,对模块运动无影响,可完整形成收纳比较大的构架天线,如图13所示。以构型RR-URU四面体单元组成的单元体构架式天线为例[14],三圈的单元体构架式天线与模块化构架式天线尺寸和形状基本相同,此单元体构架式天线完全展开到完全收拢所需自由度是55,由此可见模块化构架式天线自由度大大减少。模块化构架式天线在少自由度的基础上,可添加电机驱动天线展开,代替弹簧驱动,可达到展开可控的目的。
图13 模块化构架完全收拢Fig.13 The modular truss antenna is fully folded
5 结论
本文采用模块化思想,设计出了一种自由度少、收纳比高的模块化构架式可展开天线反射器。多模块组网后,基于螺旋理论分析了反射器桁架系统机构的构型,模块化构架式天线满足了收拢的期望特征。根据构架反射器桁架收展花盘姿态调整需求,进一步综合出多模块连接机构,实现了收纳比大的构架反射器桁架系统的综合设计。相同尺寸的模块化构架式可展开天线与四面体单元构架天线相比,自由度数目大大减少,为下一步分析此类天线机构的展开特性及模块同步展开控制奠定了坚实的理论基础。
