绿色多功能果园作业平台的设计与试验
2022-02-16卢青庄晓华
卢青 庄晓华
0 引言
我国果树种植规模仅次于粮食和蔬菜,但果树高位置修剪、果实套袋、果品采摘等作业主要依靠人工,生产效率低,劳动强度大,作业舒适度差,危险性高,且随着人工成本上升,用工难的矛盾愈发凸显[1,2]。农业发达国家对果园作业平台研发较早,其产品技术较为成熟,但与我国果园种植农艺不融合且价格昂贵[3],不适合我国作业环境。我国对果园作业平台的研究起步较晚,虽有相应产品,但存在结构简单、功能单一、操控性差、安全性低等问题[4],且大多平台使用内燃机作动力,不符合我国绿色发展理念,无法满足用户对操作平台轻便高效、操作简单、多用途、用得起的需求。为此,研制出一种绿色多功能果园作业平台。该平台以电动机替代内燃机,采用手柄控制、脚踏控制、遥控三种控制模式,可实现单人操作,搭载不同部件,能够完成树体修剪、水果采摘、打药、水果搬运等作业。
1 整体结构与工作原理
1.1 整体结构
绿色多功能果园作业平台主要由履带式底盘、动力装置、升降装置、操控台和货箱等部分组成,整体设计如图1所示。履带式底盘主要包括箱体、电瓶、驱动轮、张紧轮、托带轮、支重轮、平衡轮等;动力装置主要由驱动电机和减速机组成;升降装置包括液压单元、油管、液压缸、剪刀叉等;货箱主要包括底板、护栏、护栏延伸件等。工作时,操作人员将平台驾驶至合适位置,通过调整平台高度,完成果树修剪、果实套袋、果品采摘等作业,并将采摘的水果放入货箱随平台运输。通过加装或更换不同配件可高效完成采摘、修剪、施药、运输、称重、自卸等作业,实现一车多用。平台的行走、转向、升降可由单人在操控台上操作,也可通过远程遥控实现,整个作业过程高效、安全、可靠。
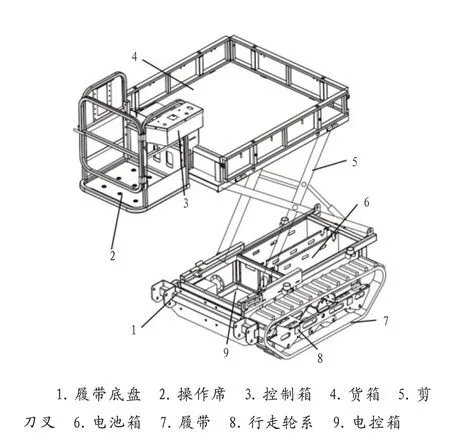
图1 绿色多功能果园作业平台结构图
1.2 工作原理
平台由电力驱动。由电瓶提供电力,通过操控手柄输出上升下降信号给电子液压单元,再由电子液压单元提供压力给油缸,最终实现货箱的上升、下降。
1.2.1 驱动原理
为了提高平台的通过性、稳定性和操控性,平台的行走采用履带式底盘。底盘的控制部件主要由两块PG(执行单元控制器)、两个行走电机和两个减速机组成。操控手柄给出的执行信号传递给PG,PG接收到信号后通过运算实现电流大小、方向的改变,从而控制电机转速、正转或反转,再由减速机将电机输出的高转速小扭矩变成低转速大扭矩的动能来驱动履带正转或反转,最终实现平台的前进、后退、原地转弯和行进中转弯功能。
1.2.2 升降原理
平台采用剪叉式液压升降结构。工作时,液压单元的电机带动液压齿轮泵泵油,液压油通过液压油管输送到液压缸内,推动液压杆伸缩来改变剪刀叉的交叉角度,控制操作平台达到理想高度。
1.2.3 控制原理
根据田间实际地貌和平台载货量,通过操控手柄进给量将信号传递给PG,让平台在田间行走平稳、安全。工作原理是通过调节8个电位器的不同阻值来给两个PG相应的模拟信号,控制电机等速正、倒转以及差速正、倒转。
2 主要部件的设计
2.1 电机与减速机的连接结构设计
由于履带在田间行走相对阻力较大,而行走电机给出的高转速低扭矩无法满足履带行走的要求,因此需要采用电机与减速机的链接设计,从而让行走电机的高转速低扭矩通过减速机转换成低转速高扭矩的力,驱动履带在田间行走。
2.2 操控系统的设计
操控系统有两种设计方案:一种是采用机械杠杆原理来控制;另外一种是通过液压电磁换向阀来控制。本平台采用的是第二种控制方式。主要原因是本平台需要在不同高度操作,机械的硬性连接无法满足平台的不同高度操作要求,而液压电磁换向阀可以满足。
2.3 手控、脚控、遥控三种控制方式的设计
为了满足田间的各种工况需要,让操作者能够安全、轻松、高效工作,设计了手控、脚控、遥控三种控制方式。
1)脚控。在疏果、套袋、捆枝时,操作人员需要双手配合,此时可以通过脚来控制平台的升降。脚控可以提高工作效率,减轻劳动强度。
2)手控。操作人员从一棵果树移动到另一棵果树时,通过手控可以按需要将平台移至任意位置。相对遥控的点位设计更加灵活方便。
3)遥控。主要适用于两种状况:一是平台过沟、过田埂或者装满东西时,人员在平台上操作相对不安全,遥控操作有利于保障人员安全;二是操作人员疲劳时可以通过遥控来控制平台的田间运输。
2.4 操作席多档调节设计
为了适应不同环境工作需要(主要是设施农业大棚的高度不一),本平台在货箱与操作席的联接件上采用了多孔位的设计方案,用户可以根据种植大棚高度自行调节操作席高度。
3 试验
3.1 试验条件
试验主要测试绿色多功能果园作业平台的安全性和作业性能,试验场地为平整硬化地面。
3.2 试验结果
3.2.1 安全性试验
安全性试验测试平台的驻车制动性、纵横向稳定性,共测试3个项目。一是将平台停在30%的干硬纵向坡道上,使用驻车制动装置,观察平台沿上下坡方向是否能可靠停住;二是在平台满载且工作台回落状态下,观察平台前后(纵向)或左右(横向)倾斜15°时是否稳定;三是观察平台在额定负载(300kg)且工作台升起状态下,左右(横向)倾斜8.5°时是否稳定。试验结果见表1。
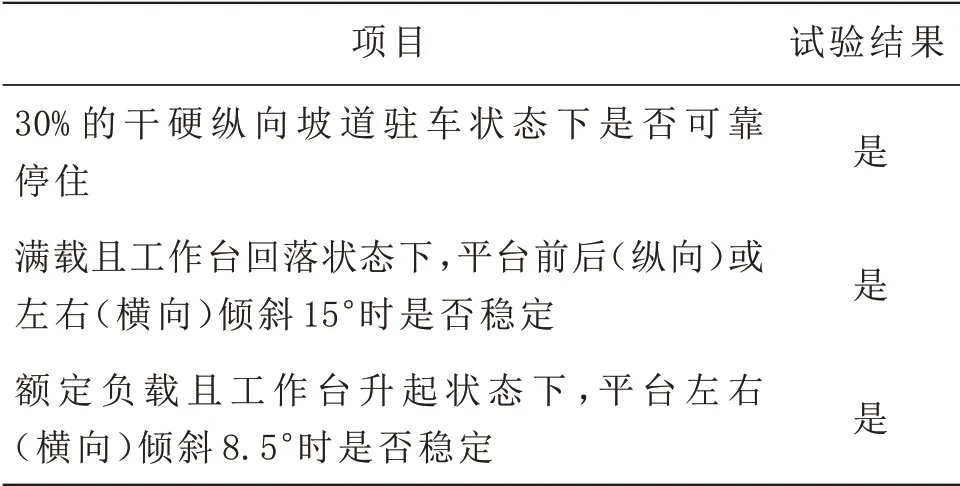
表1 安全性试验结果
3.2.2 性能试验
性能试验主要测试平台的升降速度、最大沉降量和行走速度。测试平台升降速度时,将工作台下降到最低位置,分别在空载和额定负载状态下启动电动机,测试工作台由最低位置升高到最高位置以及由最高位置下落到最低位置分别所需要的时间,并观察升降平稳性。在额定负载下测量平台最大沉降量。测量时,将工作台升到最高高度后切断动力,测量其升起高度,10min后检查各部位变形情况,并测量其最低位置处的高度,计算沉降量。测量平台行走速度时,高速挡和低速挡测试距离均为30m。测定在空载状态和额定负载状态下以最高行驶速度匀速通过测区的时间,计算行驶速度。试验结果见表2。
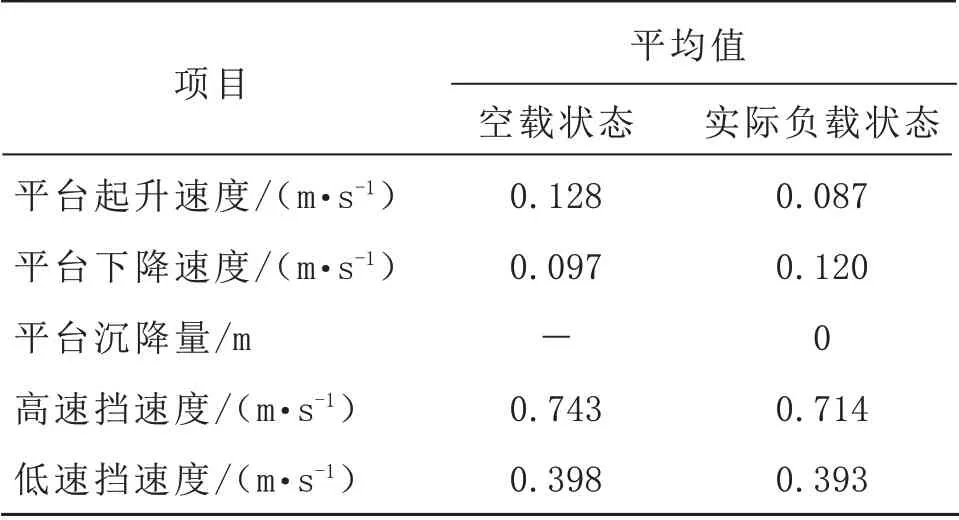
表2 性能试验结果
4 结论
1)设计了一款电驱动多功能果园作业平台。该平台采用交叉式花纹履带设计,可适应各种复杂地形,通过搭载不同配件,能高效完成采摘、修剪、运输、称重、自卸等作业,可实现一车多用。
2)平台采用剪叉式液压升降结构,在控制上采用手柄、脚踏、遥控三种模式,可实现单人控制,平台操作更加高效。
3)经过试验,平台安全性能满足DG/T212-2019《果园作业平台》要求,各项性能指标均达到设计要求。
