基于切入工况的自适应巡航控制系统性能测试方法研究
2022-02-16谢业军余天龙付广林智桂何逸波
谢业军,余天龙,付广,林智桂,何逸波
(上汽通用五菱汽车股份有限公司,广西柳州 545007)
0 引言
近年来,随着全球经济和社会的发展,国内外的人均汽车保有量快速增长。随之而来的城市交通拥堵和交通事故频发等问题,严重影响人们的出行,同时也造成国民经济的巨大损失。据荆楚网武汉频道报道,数据统计显示武汉市2020年8月交通事故中,因车辆违规加塞交通违法行为引发的交通事故,占全市交通事故近三成,车辆违规加塞、恶意变道等不文明驾驶行为已经成为交通拥挤和交通事故多发的主要原因之一。
目前,搭载有先进驾驶辅助系统(advanced driving assistance system,ADAS)的汽车正在高速发展,逐渐成为人们出行生活极其重要的部分。自适应巡航控制(adaptive cruise control,ACC)系统是先进驾驶辅助系统中最常用的功能之一,属于控制辅助类功能。ACC系统是对传统的定速巡航系统的增强型系统,通过对发动机和制动系统的自动控制,既可以使车辆保持驾驶员设定的速度行驶,也可以使本车与前车保持驾驶员设定的车间时距行驶。ACC系统是一种舒适性配置,同时也是一种主动安全类配置,因此在ACC系统的开发过程中,采用有效的测试方法对其性能进行测试评价尤为重要。
在ACC系统测试方法研究方面,许多学者进行了多方面的探索。刘伟平提出了采用ABD驾驶机器人、RT3003等设备对跟车巡航侵入量、目标重合度、目标车切入切出等工况进行精确测试的方法。曾杰等结合先进的主动安全测试设备和场地测试条件,进行全速自适应巡航系统高速、低速工况下纵向性能表现测试与评价。张志波等结合多个国际法规标准ISO 15622—2010、ISO 22178—2009、ISO 22179—2009和我国各种道路限速要求,基于对某车辆ACC系统的测试,制定了适用于我国道路工况下的ACC测试方法。目前针对ACC系统切入工况的测试方法比较少,且大多测试工况来源于法规标准,不涉及前车切入的工况,无法覆盖实际驾驶中前车加塞的情况,故文中基于ACC切入工况,设计了一种有效的性能测试方法。
1 ACC系统框架介绍
ACC系统的主要功能是通过对与前车的距离、配有ACC系统的自车动态运动、驾驶员指令等信息的处理,从而适应性地控制车速。
基于上述信息的收集,ACC系统控制策略会向执行机构发出指令,并将相应的系统状态信息告知驾驶员。
ACC通过车身电子稳定系统(electronic stability program,ESP)、电子助力转向系统(electronic power steering,EPS)、发动机控制模块(engine control module,ECM)、变速箱控制模块(transmission control module,TCM)、车身控制模块(body control module,BCM)、安全气囊模块(sensor digital module,SDM)、车载娱乐系统(in-car entertainment,ICE)及组合仪表(instrument cluster,IC)采集相关车辆状态,并通过CAN总线发送给驾驶辅助前雷达,驾驶辅助前雷达结合自身探测的外部环境或驾驶辅助摄像头(若采用雷达和摄像头融合方案)探测的目标,判断是否需要发出加速或减速请求给ESP,ESP中的相关控制模块进行控制发动机扭矩或制动系统的介入,同时通过IC显示相关信息给用户,最终实现辅助驾驶员安全、舒适驾驶。ACC系统框架示意如图1所示。
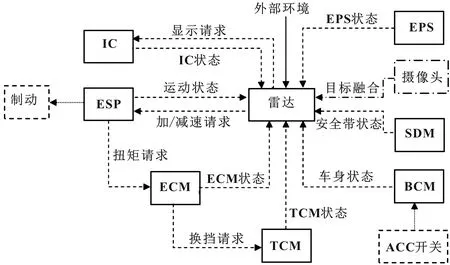
图1 ACC系统框架示意
当驾驶员设定好期望车速以及与前车之间的车间时距后,ACC需通过驾驶员来激活。要想使车辆达到设定的期望车速和车间时距,就需要通过发动机的控制或者制动系统的介入才能实现。如果没有前车,ACC将像传统的定速巡航控制系统那样工作,调节车辆的行驶速度使其达到驾驶员的设定速度。
2 性能测试方法
2.1 测试场地
测试场地示意如图2所示。具体要求如下:①测试场地为干燥的沥青路,且道路平坦,路面最小峰值的摩擦因数为0.9;②测试场地路面不能有凹坑、裂缝等;③测试场地路面上方不得有标志、龙门等设备,不能有其他障碍物;④测试场地不能有引起传感器误识别高的反射面或类似车辆轮廓的东西;⑤测试场地至少包含两条车道的长直道,中间车道线为白色虚线;⑥直道长度要求最小为300 m。

图2 测试场地示意
2.2 测试设备
测试设备名称、数量及用途见表1。大平板与Euro NCAP、C-NCAP、i-VISTA等权威第三方测试机构认可的假车目标相兼容,大平板与装有高精组合惯导系统的测试车辆能实现同步,可以按照预设轨迹移动,模拟真实交通流。大平板系统包括大平板、主AP网桥、主机箱、遥控器、测试车辆AP网桥、测试车辆RT惯导以及RT固定基站。大平板系统及假车目标的安装与连接方式如图3所示。
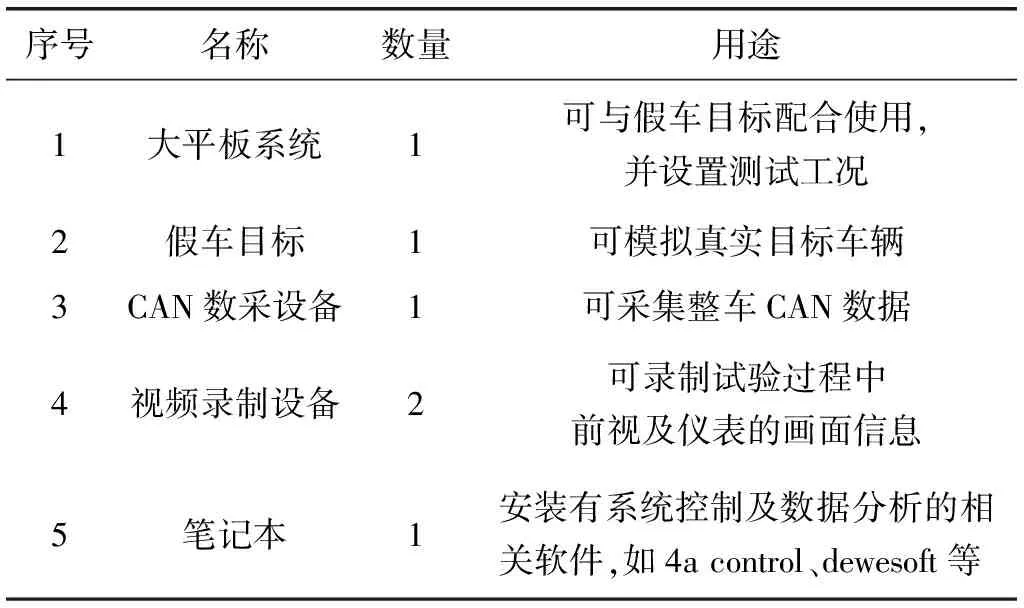
表1 测试设备名称、数量及用途
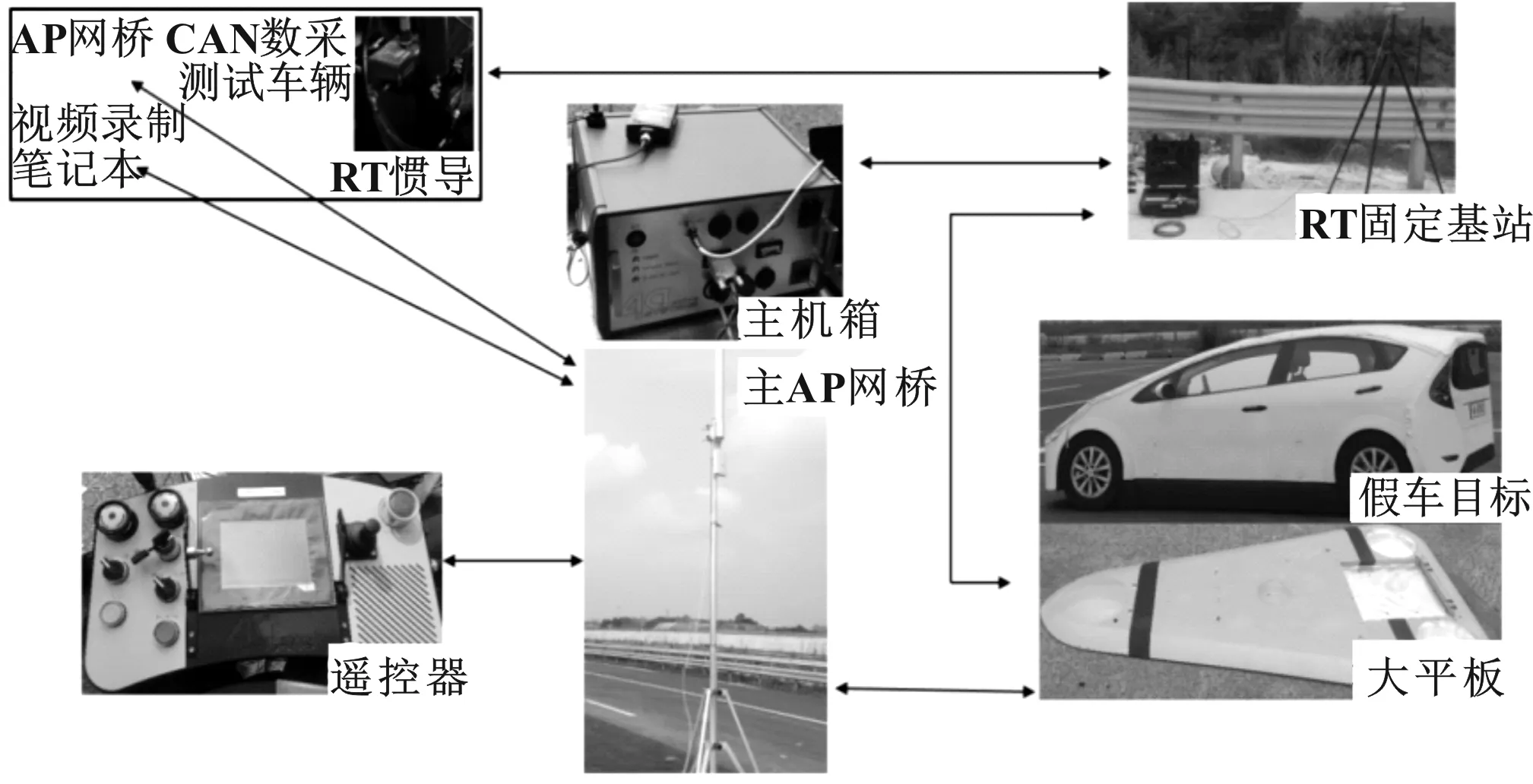
图3 大平板系统及假车目标安装与连接方式
测试设备的性能指标及对应的精度要求如下:
(1)原始采样频率不小于100 Hz。
(2)速度精度不大于0.1 km/h。
(3)俯仰角/侧倾角精度不大于0.03°。
(3)侧滑角精度不大于0.15°。
(4)加速度量程为±10。
(5)加速度线性度为0.01%。
(6)角速度量程为±100°/s。
(7)角速度线性度为0.05%。
(8)绝对定位精度不大于2 cm。
2.3 测试工况
ACC切入工况详细描述为:测试车辆在距离前车200 m前达到设定车速的要求,开始进行整车CAN数据采集以及视频录制;以稳定车速状态行驶,前车按照测试工况的要求切入测试车辆所在车道,并沿车道中间行驶,过程中驾驶员双手握住方向盘,使得行驶方向不发生偏离,并且不得干扰测试车辆的纵向驾驶。切入工况测试场景示意如图4所示。
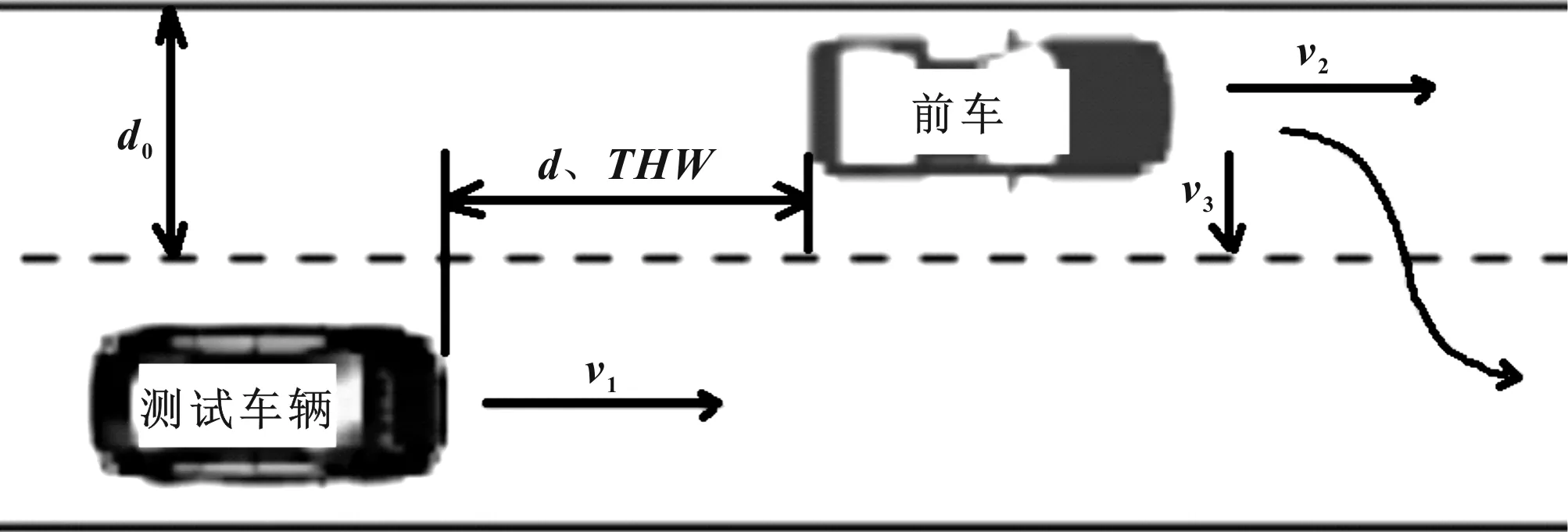
图4 切入工况测试场景示意
图4中,单车道宽度=3.7 m,测试车辆速度为,前车速度为,两车速度差为Δ,前车切入横向速度为,前车切入过程持续时间为,前车切入时测试车辆最前端与前车最后端的纵向距离为,前车切入时测试车辆最前端与前车最后端的时距为,前车切入后测试车辆的预计碰撞时间(理论计算值)为。上述各物理量之间关系式如下:
Δ=-;
(1)
(2)
(3)
将式(2)代入到式(3),可得到以下公式:
(4)
由于测试车辆搭载有ACC系统,在前车切入的过程中即识别前车并做出制动响应,因此,当前车完成切入时,测试车辆实际的速度会比设定的速度低,因而实际的会比理论计算值大一些。
3 测试结果与分析
3.1 Dewesoft软件介绍
Dewesoft软件可以匹配多个支持的接口,这些接口可以在同一个数据文件中进行同步、采集、存储和可视化。其支持的接口包括:视频、GPS、IMU、CAN总线、以太网等。Dewesoft还包含许多用于可视化数据的可视化显示。从交互式水平或垂直记录仪、图形、3D图形、轨道、表格、开放街道地图等。通过使用提前制定好的模板进行数据录制与回放,可以读取所需要的数据结果。Dewesoft软件回放界面如图5所示。
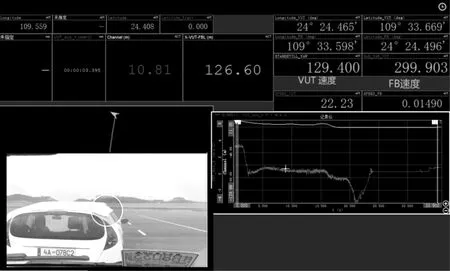
图5 Dewesoft软件回放界面
3.2 不同切入横向速度下的测试
测试车辆速度为50 km/h,前车速度为40 km/h,保持速度差Δ=10 km/h、切入纵向距离=12 m这两个参数一定,以切入横向速度为单一变量,进行试验设计,测试结果记录、制动时纵向距离、制动时横向距离、最大减速度、主观感受及是否碰撞。不同切入横向速度下的测试结果见表2。
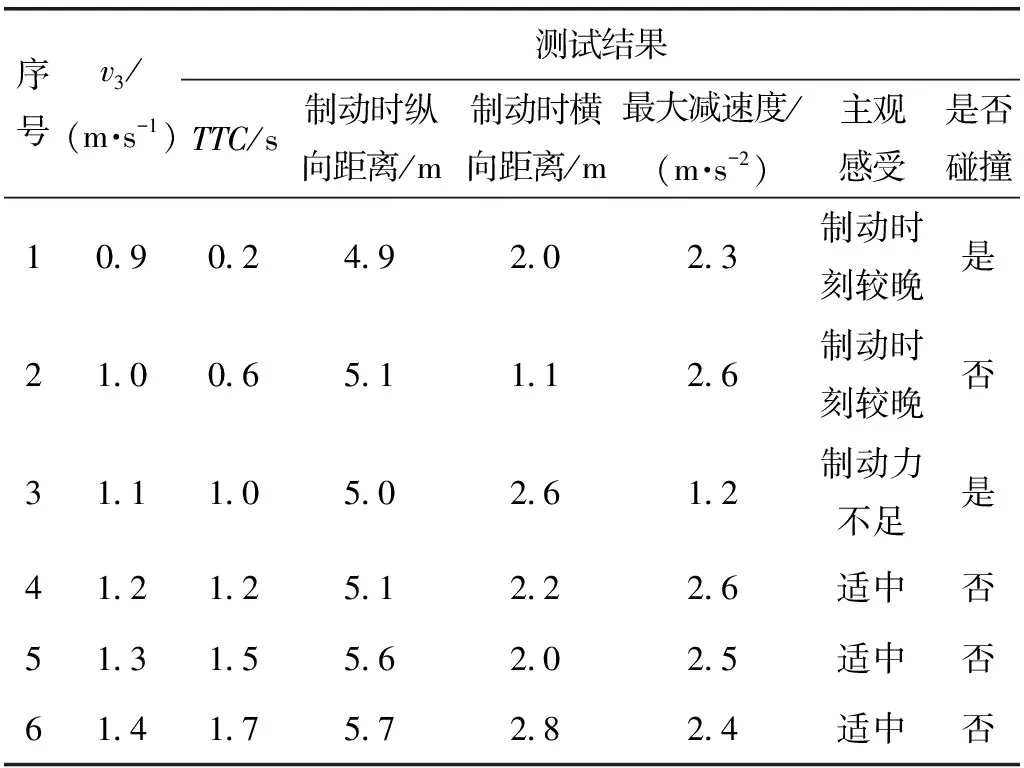
表2 不同切入横向速度下的测试结果
3.3 不同切入纵向距离下的测试
测试车辆速度为50 km/h,前车速度为40 km/h,保持速度差Δ=10 km/h、切入横向速度=1.2 m/s这两个参数一定,以切入纵向距离为单一变量,进行试验设计。不同切入纵向距离下的测试结果见表3。
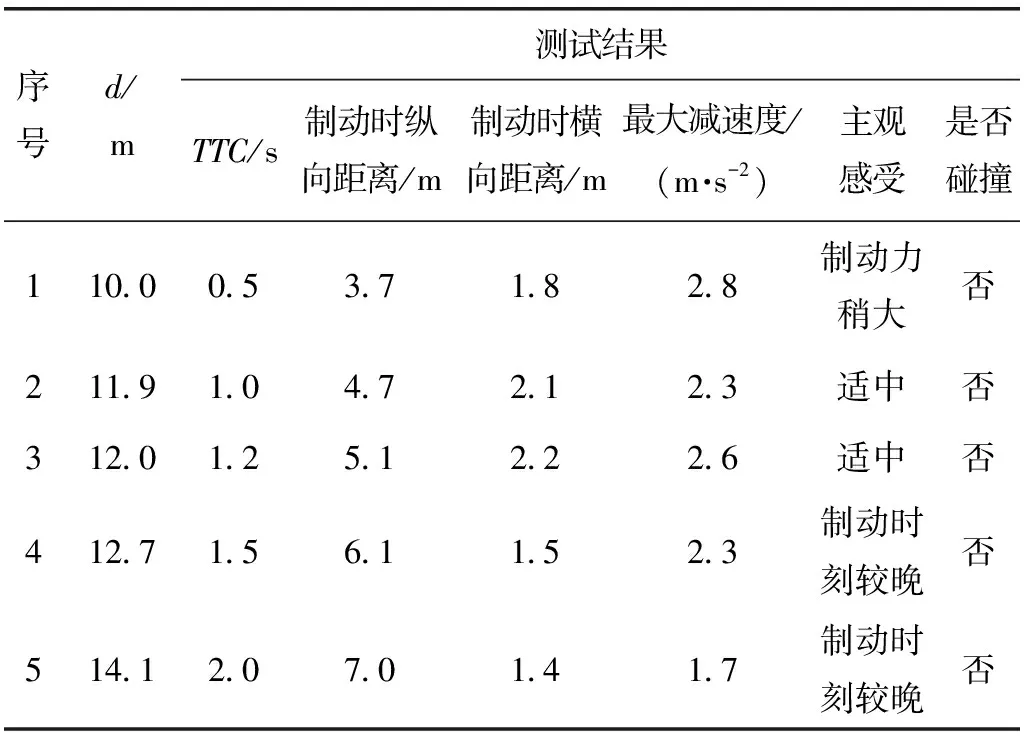
表3 不同切入纵向距离下的测试结果
3.4 不同速度差下的测试
测试车辆速度为40 km/h,前车速度分别为35、30、25 km/h,切入纵向距离=12 m、切入横向速度=1.2 m/s这两个参数一定,以速度差Δ为单一变量,进行试验设计。不同速度差下的测试结果见表4。
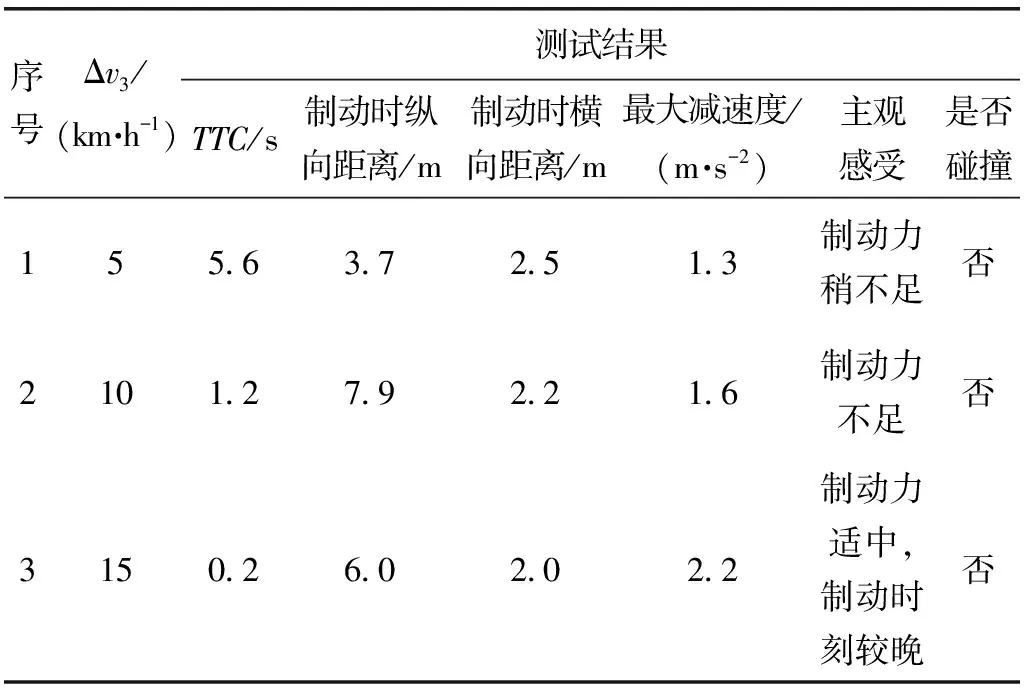
表4 不同速度差下的测试结果
4 结论
(1)文中使用的ACC切入工况性能测试方法有效,且测试结果一致性较好。
(2)速度差和切入纵向距离一定时,切入横向速度越大,也越大;速度差和切入横向速度一定时,切入纵向距离越大,也越大;切入横向速度和切入纵向距离一定时,速度差越大,会越小。
(3)在开发ACC系统性能时,考虑切入工况下,推荐最大减速度设计区间为2.2~2.6 m/s,推荐制动时横向距离设计区间为2.1~2.8 m。
