基于UWB定位技术的油田钻修井作业安全监测方法
2022-02-15薛福利工程师
薛福利工程师
(大庆油田有限责任公司 质量安全环保监督评价中心,黑龙江 大庆 163000)
0 引言
在进行油田开采时,第一步需要完成钻井工作,这一环节与后续开采的各项工作相比危险性更高,需要更高的技术和精度。大部分油田钻井深度超过1 500m,并且每一口油田钻井都需要至少半个月时间。在进行油田钻修井作业过程中,若遇到岩洞会出现润滑泥浆漏失,而在此过程中,一旦出现低压区域压力过高的现象,就会造成下部分泥浆不规则上涌。倘若没有及时预测与处理,就会对工程施工作业造成严重影响,甚至还会使安全事故的发生概率提升。赵颖等[1]基于极限学习机,建立海上钻井机械钻速监测模型,并以南海YL8-3-1井为例进行验证与钻井参数实时优化,监测结果与实测结果大致吻合,可以对机械钻速进行实时监测;王江帅等[2]提出基于井下分离的作业监测方法,通过实例对比气侵发生后深水双梯度钻井和常规单梯度钻井环空出口液相表观速度和出口流量变化规律的差异性,分析不同井深、气侵量、分离器位置、重/轻质钻井液密度差、排量及井口回压条件下的环空出口流量变化,完成作业监测。但该方法的作业监测结果与实测结果相差较大,无法保证作业人员安全问题。
而定位技术在施工作业安全监管中具有重要作用。目前应用于油田钻修井作业的定位技术通常是采用超声波定位技术实现,这种技术虽然在应用中能够有效降低功耗,并且具备良好的抗多径效果,但非视距传播影响较大,并且在复杂的钻修井作业环境中无法保证较高的定位精度。因此,针对上述方法存在的问题,本文基于UWB定位技术开展对油田钻修井作业安全监测方法的设计研究,并通过仿真实验验证本文方法的有效性,以期为石油工业作业安全提供参考。
1 油田钻修井作业安全监测方法
1.1 UWB定位技术
超宽带(Ultra-wide Band,UWB)定位技术是近几年新兴的一种定位技术,该技术主要是通过测距和测向的方式实现定位。目前UWB定位技术在变电站领域中应用十分广泛,不仅能够很好地适应变电站的复杂环境,同时还能够满足变电站监测的精度,实现低成本定位。
1.2 油田井下液位数据采集
在UWB定位技术中传感器网络是其重要的组成部分,为实现对油田钻修井作业的安全监测,本文首先结合液位传感器实现对油田液位数据的采集[3]。在进行油田钻修井作业的过程中,可通过实时监测井下泥浆液位的方式,为后续钻修井作业节点定位提供条件。由于油田钻井现场通常都会有2个泥浆池,因此在选择液位传感器时应当选择2个性能较高且具有良好耐高温性和耐腐蚀性的液位传感器[4]。基于传统安全监测方法采用超声波技术的优势,本文选用超声波液位传感器,将超声波的接收装置和发射装置放置在水中,让超声波通过液体传播。使用超声波探测设备,结合在此过程中的发射时间,对传播距离进行推导,并输出下述距离计算公式。
(1)
式中:
h—传导设备与井下泥浆的距离,m;
v—监测介质中,超声波可实现的传播速度,m/s;
t—波长反射时间,s。
根据上述公式可得出超声波从发射到被接收经过的路程,以此进一步推导出钻修井作业时井下液位的高度为:
h=(s2-a2)0.5
(2)
式中:
h—钻修井作业时井下液位高度,cm;
s—反射距离,cm;
a—传感器在井下的间距,cm。
超声波在传播过程中受到环境温度的影响,在实际油田钻修井作业过程中温度是在不断发生变化的,因此还需要结合超声波传播速度与温度之间的关系,对公式(1)中的v值进行选择,见表1。
利用液位传感器对油田液位数据进行测量和采集,假定在获取数据后,发现井下的温度变化趋势较不显著,可以认为在此种条件下,介质的传播速度基本不发生变化。如果此时终端对获取数据的要求较高,便可通过补偿温度的方式,对输出的数据进行二次校正,以此确保输出的数据信息可满足监测需求[5]。一般使用条件下液位传感器测量误差为0.1%,液位数据采集范围在1×10-2~1×104m,若油田井下液体存在大量气泡或液位波动幅度较大,则会产生较大误差。为进一步提高液位数据采集的准确性,本文在选择超声波传感器时,选用PROBE15-180型号一体化超声液位传感器,该型号传感器能够充分满足油田钻修井作业复杂环境的高测量精度需要。PROBE15-180型号一体化超声液位传感器运行电源为16~25V,测量范围在0.25~4.5m以内。该型号传感器在对钻修井作业中油田井下液位数据进行采集时可自动对温度进行补偿,进一步提高液位数据采集的精度。
1.3 基于UWB定位技术的钻修井安全作业节点定位
UWB定位技术根据不同定位精度可分为2个参考点定位和3个参考点定位,为进一步提高油田钻修井作业的安全性,实现对其高精度监测,本文选择采用3个参考点的定位方法实现对钻修井作业节点的定位[6]。利用上文选择的PROBE15-180型号一体化超声液位传感器,对液位数据进行采集时,完成从固定位置参考点向移动标签发射信号的功能,基于UWB定位技术的钻修井作业节点定位示意图,如图1。

图1 基于UWB定位技术钻修井作业节点定位图Fig.1 The node location diagram for drilling and workover operation based on the UWB positioning technology
获取到相应信号的时间以及固定参考点发射信号的时间可通过直接测量的方式获得,根据图1所示内容,进一步计算出2点之间的距离,其计算公式为:
r=(t-t')c
(3)
式中:
r—固定参考点到标签位置上的距离,m;
t—获取到相应信号的时间,s;
t'—固定参考点发射信号的时间,s;
c—本文上述超声波的传播速度,m/s。
根据图1中3个参考点到标签的距离,按照公式(3)计算得出标签的实际位置,以此实现基于UWB定位技术的钻修井作业节点定位[7]。同时,在实际应用中,考虑到UWB定位技术的高精度要求,将测量数据的误差控制在0.01范围内。因此,针对这一问题还需要在3个参考点上分别设置2个双曲线,并取其焦点,以此实现多个点的定位。油田井下范围较广,仅凭借各个参考点可能无法实现对钻修井作业节点的精准定位。针对这一问题,利用移动终端设备,在每隔一个固定距离上随机分布一个参考点,使其始终保持与其周围钻修井区域内和固定超声波传感器之间的有效通信,从而对移动终端设备进行精准定位。在按照上述公式(3)获取各个参考点与各个节点之间的距离后,随机抽取其中3个距离相对较近的数值进行距离矩阵计算,并采用三边法对其进行定位。针对定位过程中存在的误差累加问题,本文以计算得出的标签坐标与各个参考点之间的距离和已知距离差的平方和为目标,引入数值最优概念,对当前定位节点的坐标进行修正。最后,对修正后的坐标进行适当的旋转或平移,得到最终高精度的钻修井安全作业定位节点,实现定位误差补偿,确保最终得出的定位结果满足安全监测的定位精度。
1.4 划分钻修井作业安全范围及动态监测报警
利用UWB定位技术实现钻修井安全作业节点定位后,还应当对作业人员的作业范围进行设定,确保作业人员始终在安全范围内完成钻修井作业任务。划分钻修井作业安全监控动态预警范围是进行安全监测预警的重要前提条件。针对当前常见的集中预警范围划分方法,本文结合油田内泥浆液位变化规律及钻修井作业安全需要,选用专家划分法实现。在对临界区域进行明确时,根据油田井下液位数据,确定钻修井作业安全水平的值域,并且针对每个值域划分不同的危险等级。油田钻修作业的安全水平可划分为5个不同等级,分别为安全、基本安全、较危险、危险和非常危险。根据泥浆液位实际变化规律,对5个不同安全水平的值域进行划分。
将PROBE15-180型号一体化超声液位传感器与监控中心通过无线数据传输网络进行通信连接,利用无线电波实现监控中心与传感器位置的网络数据传送[8]。在明确钻修井作业安全监控动态预警范围的基础上,为实现第一时间向作业人员发出报警信号,引入报警器芯片和报警显示灯,安装在PROBE15-180型号一体化超声液位传感器上。
在实际开展油田钻修井作业时,安全监控报警流程为:当传感器监测到泥浆液位可能存在异常变化或UWB定位技术定位得出的钻修井作业节点超出安全范围时,立刻将相应数据传输到监控中心上位机,并由上位机通过与数据库中预先设置的阈值进行对比,判断油田钻修井作业人员是否存在安全作业风险,若存在则立即将返回信号传输到传感器,由传感器上的报警装置发出报警声,并显示红灯;若不存在则报警灯显示绿灯,并且不发出任何报警声,作业人员可继续开展作业[9-10]。同时,为实现钻修井作业状态的进一步细化,可在绿灯与红灯之间设置蓝灯、黄灯和橙灯3种不同颜色的警灯。当蓝灯亮起时,表示油田钻修井作业过程中存在较多危险因素,并且各个影响因素之间相互干扰造成了安全流失率提升,整个钻修井作业从安全状态转变为风险状态;当黄灯亮起时,表示危险进一步发展,整个钻修井作业已经由风险状态转变为威胁状态;当橙灯亮起时,表示危险处于即将爆发的状态,整个油田钻井作业从风险状态进一步转换到危机状态,随时会出现安全事故。根据上述设定内容,在实际钻修井作业过程中,根据警灯显示情况,井下作业人员可对自身所处安全状态进行实时观测,确保作业安全,以此实现油田钻修井作业安全监测。
2 对比实验
2.1 实验准备
结合油田实际开采情况和开采要求,本着经济、实用原则,制定油田钻修井方案,为验证上文提出的基于UWB定位技术的油田钻修井作业安全监测方法,在钻修井作业区域内,分别设置遮挡区域Ⅰ、遮挡区域Ⅱ、电磁干扰区域Ⅰ、电磁干扰区域Ⅱ和无遮挡无干扰区域共5个不同区域。在进行实际油田钻修井作业过程中,确保作业方式、作业人员、作业环境等实验条件均在相同情况下,完成对比实验。
将本文安全监测方法与传统基于超声波技术的监测方法应用于该钻修井工作中,通过油田钻修井作业监测界面获取油田钻修作业人员的位置,针对该位置,对其安全作业进行监测和判断。在已知钻修井作业位置坐标的情况下,将其作为实验依据,选择将2种安全监测方法的定位结果横纵坐标误差作为评价指标,对比2种监测方法的精度。油田钻修井作业对作业人员的安全监控主要是在结合井下液位变化的基础上,判断作业人员是否在安全的作业区域内完成各项操作任务,并判断作业人员是否在场,是否与泥浆位置保持安全距离。这些监控要求,均要求安全监测方法达到一定的定位精度。为确保油田钻修井作业中人员的安全,对安全监测方法提出的定位精度误差上限应不超过20cm。
2.2 实验结果与分析
为更加直观地对2种安全监测方法进行对比,利用Excel软件将得到的实验结果进行记录并分析,见表2。
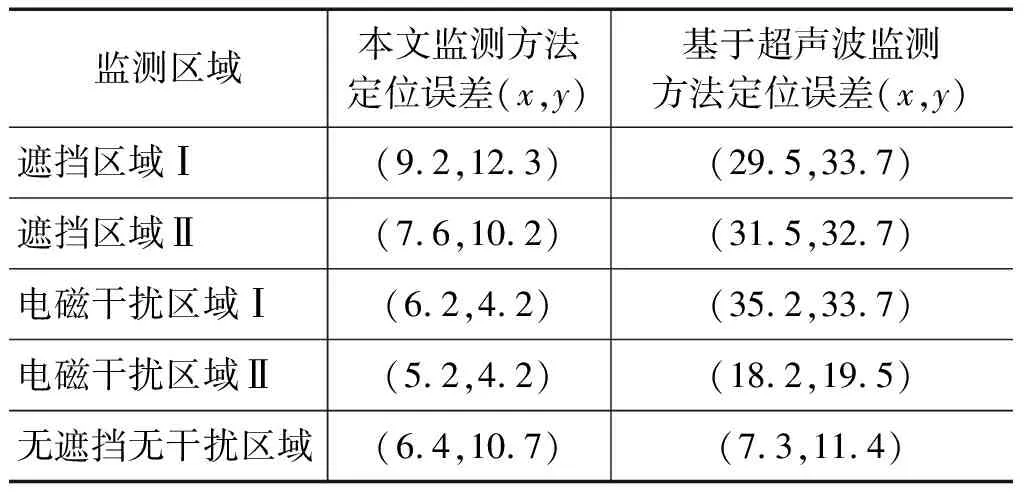
表2 2种监测方法实验结果对比表Tab.2 The comparison of experimental results using two kinds of monitoring method 单位:cm
y表示为2种方法给出的监测定位结果纵轴坐标误差
从表2可以看出,在无遮挡无干扰区域内,2种监测方法定位误差均满足油田钻修井作业的定位精度要求。但在其他区域内,由于传统基于超声波的监测方法不具备抗干扰能力,并且没有为定位提供补偿的机制,因此产生较大的定位误差,并且在遮挡区域I、遮挡区域II和电磁干扰区域I内,定位误差均超过油田钻修井作业安全监测的高精度定位要求。因此,通过对比实验证明,本文提出的基于UWB定位技术的油田钻修井作业安全监测方法在实际应用中具备更高的安全监测精度,能够实现对钻修井作业的高精度定位,确保作业人员的安全。
3 结论
(1)本文针对油田钻修井作业状态的实时监测问题进行深入探究,并结合UWB定位技术提出一种全新的安全监测方法。
(2)通过将该监测方法应用于实际,证明该方法能够有效减小监测定位误差,为作业人员提供更加安全的钻修井作业条件。
(3)但由于研究时间有限,本文提出的监测方法仍然存在很多不足,例如在进行安全动态监测报警时,数据的通信有效性还有待进一步提高,针对钻修井作业现场的其他参数还需要进行更加全面的监测等。因此,在后续研究中,针对这些问题还将进行更加深入的研究。