食品(饮料)加工车间机载微流控霉菌检测装置
2022-02-13赵中营徐佩锋
赵中营 徐佩锋 严 方
(江苏农林职业技术学院,江苏 镇江 212400)
霉菌是自然界分布极其广泛的真菌,其孢子直径一般为2~10 μm,可借助于空气流动散播到较远的地方。霉菌孢子的繁殖能力极强,在适宜的环境条件下可大量生长繁殖,污染环境,引起传染。食品(饮料)加工车间一旦污染霉菌,在水分活性、温度、湿度等适宜条件下,会快速生长繁殖导致食物变质,甚至产生毒性。食品生产企业由于空气污染到食品出现菌落总数超标等问题不是个别现象,面对越来越严格的国标,越来越多的食品企业开始注重车间内空气中霉菌孢子数的控制。在食品(饮料)加工车间空气中快速检测霉菌,有助于快速切断霉菌的源头以及传播途径,并且针对性地进行霉菌防范处置。
单一的微生物检测技术采用的是菌落直接沉降法[1],在车间选择取样点通过采集沉降菌进行培养计数的方式测定生产环境中的污染程度,该方法需要专业的技术人员及相应的培养条件。随着光学传感技术的发展,可以利用粒子在光照下成像的原理实现对空气中霉菌孢子的采集,从而判断环境污染程度,但光学成像后专业图像辨识技术对空气中微颗粒的有效分类比较复杂,受到颗粒叠加、光学阴影等因素干扰,影响了霉菌孢子污染数据的准确性[2-3]。在仓储等领域一定浓度的霉菌孢子的检测,可以通过CO2浓度等关联性参数测量获取[4],但此类检测方法需要霉菌达到足够的浓度。采用分子生物学快速检测技术可以检测到非常微量真菌数量,可达10 个/mL[5],但需要对特定基因以及特异性引物进行针对性选择与设计。
微流控是一种广泛应用于微量微颗粒检测的技术[6-8],可以在空气中捕获微量的霉菌孢子,微流控芯片通过专业的动力学设计,可以将空气中的微颗粒进行分离,从而针对粒径为2~10 μm的霉菌进行富集;室内无人机因为其灵活机动性能,在室内巡逻、仓储盘点等方面有着广泛应用。研究拟采用室内无人机加载微流控芯片检测食品(饮料)加工车间空气中的霉菌孢子,以期为食品(饮料)加工车间有效监测并防控霉菌孢子污染提供一个新的途径。
1 霉菌孢子捕捉装置
传统的孢子捕捉装置直接将霉菌孢子富集在载玻片上,再通过显微镜对富集后的微颗粒进行辨识。这种辨识一方面需要非常专业的知识,另一方面载玻片上各种微颗粒的叠加情况较为严重,即便是显微镜下也难以分辨。食品(饮料)加工车间的空气中霉菌孢子数量较少,而微流控的孔径也是非常小,因此直接用微通道采集空气中的孢子非常困难,要想快速捕捉到霉菌孢子,就需要在微流控芯片入口处设计一个霉菌孢子捕捉装置,其基本原理是通过微正压形成孢子捕捉区域的空气微循环,再利用微流控芯片的负压风机提高捕捉空气中霉菌孢子的概率。通过负压风机强制监视空间的空气流动,可以增加孢子在捕捉口出现的概率,而且根据空气动力学原理,强制流动可以引起循环空气气流多次缩放,使得捕捉室内循环空气中的水汽凝结与汽化现象比不流通空气更为显著,从而增强水汽凝结后的微颗粒聚集作用,增加空气中微颗粒在空气中的驻留时间,提高捕捉室内的微颗粒密度。
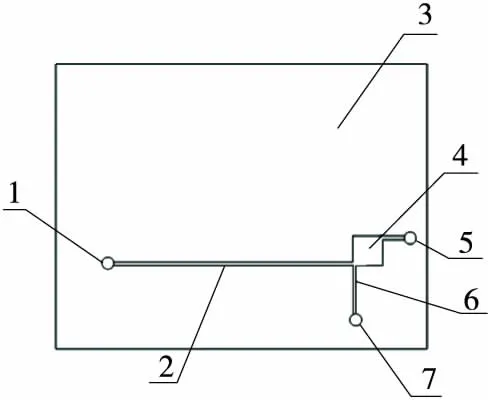
图1为机载霉菌孢子捕捉装置,通过通流负压风机形成监测区域空气循环。空气的循环为空气中的孢子以及其他微颗粒带来摩擦力,从而形成对孢子与其他微颗粒的牵引力,使空气中的孢子随着空气在捕捉通道内循环流动。空气在捕捉窗、捕捉孔、缩放孔、通流孔等区域缩放,会增加空气中的水汽凝结与汽化现象发生概率,从而增加微颗粒在空气中随空气流动的阻尼,当阻尼大于孢子和其他微颗粒的牵引力,会使孢子或其他微颗粒减速,增加孢子在采集装置中的停留时间。采集装置从前后左右下侧收集周边空气,从上侧排出空气,无人机机翼又使排出空气向下流动,这样可以形成采集区域的空气循环。

1. 通流负压风机 2. 微流负压风机 3. 富集窗 4. 微流控芯片 5. 鞘流压缩空气泵 6. 富集孔 7. 缩放孔 8. 通流孔 9. 壳体
微流控芯片的微通道为100 μm(高)×500 μm(宽),微颗粒通过微流负压风机进入通道形成霉菌孢子的空气流,在分离区通过鞘流压缩空气泵进行微颗粒分离。微流负压风机与鞘流压缩空气泵转速对于霉菌孢子的富集与分离具有一定影响,需要结合通道长度、微颗粒种类等进行设置。
2 微流控芯片
参照Xu等[9]设计的一种针对2~10 μm的霉菌进行富集的微流控芯片(如图2所示)设计富集微流控芯片。其前端为采集管,通过微流负压风机使霉菌孢子在微管道以V0的流速移动。在微流控芯片中部设计有一个鞘流压缩空气泵,形成鞘流,用于偏转微颗粒,分离出霉菌孢子。分离富集边缘采用流型设计,微粒子在鞘流作用下发生不同的偏转,如图4所示富集在不同的区域。
1. 采集口 2. 加速通道 3. 本体 4. 富集与分类区 5. 微流负压风机口 6. 鞘流通道 7. 鞘流压缩空气泵入口
有研究[10]表明,室内气溶胶在2.79~10.00 μm的微颗粒数量较少,在2 μm以下的微颗粒数量较多。在严格控制气溶胶的食品(饮料)加工车间,2.79~10.00 μm的微颗粒数量更少。空气中的微颗粒大致分为两类:密度较大的灰尘颗粒和相对密度较小的孢子颗粒。而微流控芯片可分离出2.79~10.00 μm的灰尘颗粒(Ⅰ类颗粒),2.79~10.00 μm的霉菌孢子颗粒(Ⅱ类颗粒),2.79 μm以下的灰尘颗粒和霉菌孢子颗粒(Ⅲ类颗粒),10.00 μm以上的灰尘颗粒(Ⅳ类颗粒),以及10 μm以上的孢子颗粒(Ⅴ类颗粒)。
微流控芯片加速通道的静摩擦系数较小,气流对微颗粒的牵引力足以克服其摩擦力,当加速通道足够长时,在微流负压风机作用下气溶胶各微颗粒在加速通道出口的初速度(V0)与气流速度一致。富集区域静摩擦系数较大,当颗粒进入富集区域后其所承受的摩擦力大于气流的索引力时,便沉降富集在富集区域。
微流控芯片对微颗粒进行筛选的基本原理见图3(a)和图3(b),微颗粒在通道中的受力见图3(c)。在鞘流的作用下,微颗粒体积越大所获得的纵向速度Vy越大,质量越大摩擦力越大,而微流负压风机作用下的气溶胶各微颗粒初速度V0是一致的。根据式(1)在富集区不同粒径微颗粒的垂直位移Sy有差异。直径大的微颗粒在FD的作用下,垂直位移Sy较大,直径小的Sy较小。质量大的微颗粒承受的阻力大,横向速度下降快,其富集区域离出口近,质量小的离富集区域出口远。根据受力分析5类气溶胶颗粒出现较大概率的富集区域如图4所示。

图3 微颗粒在微流控芯片中受力分析

图4 不同颗粒的大概率富集区域示意图
Sy=LJGVy/V0,
(1)
式中:
Sy——微颗粒的垂直位移,μm;
LJG——通道x轴行程,μm;
V0——气溶胶各微颗粒初速度,μm/s;
Vy——鞘流作用下微颗粒y轴速度分量,μm/s。
3 机载微流控霉菌检测装置在食品(饮料)加工车间检测效果
3.1 检测方案设计
试验采用微型无人机作为霉菌孢子捕捉装置的载体,微型无人机对采集区域的气流扰动较小,同时图1所设计的负压捕捉装置在一定程度上减弱了微型无人机的气流扰动影响。试验样本霉菌孢子是2020年4月由江苏农林职业技术学院于人工气候室内培养获得,试验利用气溶胶发生器可将孢子样本制作成气溶胶粒子,均匀释放在单位体积为1,10,100 L的容器中,获不同浓度的样本。分别取105,104,103个/mL的样本,在无人机检测过程中喷制时间为10 s,允许自然沉降,喷制在无人机采集点的上方,分别采用传统的落板法和微流控采集法进行霉菌气溶胶采集,富集时间均设定为20 min,富集后的载玻片和微流芯片均采用光学显微镜观察成像,采用显微图像法计算获得平均孢子浓度。
3.2 结果与分析
不同浓度下微流控法的霉菌孢子富集图片在光学显微镜下的成像如图5所示。105,104,103个/mL试验环境下微流控法收集的霉菌孢子分别为367,73,19个,而采用传统落板法的分别为63,22,0个。从试验结果来看,采用无人机机载微流控芯片可以快速收集到空气中游离的霉菌孢子,在光学显微镜下收集到的孢子数量随着浓度的增加而增加,但试验结果虽然反映出孢子浓度的大小趋势,但并未建立严格的线性关系(见图6)。这种非线性关系现象一方面与微流控芯片微通道自身的采集概率相关[8],同时在一定程度上受到无人机对采集区域气流的扰动影响。

图5 霉菌孢子富集后光学显微成像
4 霉菌孢子的图像分析与数量统计算法
4.1 图像灰度计算
Canny边缘检测算子是John F. Canny于1986年提出的。经典Canny算法用了4个梯度算子来分别计算水平,常用的边缘差分算子有Rober、Prewitt、Sobel。使用Canny算法前先要将图6按式(2)进行灰度化。

图6 霉菌孢子喷洒浓度与检测数非线性关系
Gr(x,y)=0.229R(x,y)+0.587G(x,y)+0.114B(x,y),
(2)
式中:
Gr(x,y)——待求像素点(x,y)的灰度值;
R(x,y)——待求像素点(x,y)的颜色值R分量;
G(x,y)——待求像素点(x,y)的颜色值G分量;
B(x,y)——待求像素点(x,y)的颜色值B分量。
4.2 Canny算子低通滤波与边缘特征计算
对灰度图像Gr(x,y)进行卷积低通滤波,滤波函数选取Gs(x,y):
(3)
Canny算子通过应用高斯函数Gs(x,y)对灰度图像进行卷积低通滤波,形成式(4)。
f(x,y)=Gs(x,y)*Gr(x,y),
(4)
式中:
*——卷积。
使用一阶有限差分[式(5)、式(6)]近似计算x与y偏导数的两个阵列。
(5)
(6)
再通过x与y偏导数的两个阵列计算图像的边缘梯度幅值和边缘的发展方向值,用于图像边缘提取的特征判据,分别用M(x,y)、θ(x,y)表达。
(7)
(8)
4.3 Canny算子的简化计算与边缘特征提取
为了进一步简化计算,也可以根据式(9)、式(10)近似计算图像的边缘梯度幅值和边缘的发展方向值M(x,y)、θ(x,y)。
(9)
(10)
进一步对M(x,y)进行非极大值抑制,用双阈值算法检测和连接边缘。检测效果如图7所示,对照图5可以发现所提取的霉菌孢子数量要与实际的霉菌孢子数量基本接近,尤其是图7(b)、图7(c)十分显著,但个别孢子形状也变小了。从图7的实际处理效果来看,孢子在叠加的情形下,如图7(b)、图5(b)所示,难以通过图像边缘分割后获得准确的孢子数量。通过图7与图5的对比,在Canny算子边缘检测过程中,孢子辨识的直径总体趋于直径变小,变小的比例与孢子成像的边缘特征相关,因此需要对Canny算子进行进一步优化,以确保图像辨识的保真度。

图7 Canny算法检测效果
5 结论
采用霉菌孢子前端采集装置和微流控富集装置,可以快速采集到食品(饮料)加工车间喷洒的霉菌孢子,试验最小的测试浓度为103个/mL,所收集到的孢子数量为19个,而传统的落板法测量不到。在试验过程中,机载微流控霉菌孢子检测装置所采检测到的孢子数量可以反映喷洒在空气中的霉菌孢子浓度增长趋势,但并未建立线性关系,其测量的非线性一方面受到霉菌孢子在空气中的扩散速度和喷洒方式影响,另一方面也与无人机机翼气流的扰动有一定关系。同样传统的落板法所采检测到的孢子数量与喷洒在空气中的霉菌孢子浓度也不存在很显著的线性关系。采用机载无人机在空气中检测食品(饮料)生产车间霉菌污染,不仅可行,并且操作非常简单,实施成本也非常低,是一种值得进一步研究的检测方式。后续将进一步研究无人机的飞行路径对孢子浓度检测的影响、霉菌孢子的图像辨识计数等。
