基于多维多层立体指标PNT优选策略与评估方法*
2022-01-26张爽娜董启甲
田 丽,张 伟,张爽娜,董启甲
(1. 航天恒星科技有限公司·北京·100086;2. 天津航天中为数据系统科技有限公司·天津·300301)
0 引 言
目前,我国北斗卫星导航系统已完成全球组网,无人系统对导航应用需求越来越大,但是卫星导航系统易受遮挡、干扰,单一导航定位授时(Positioning Navigation and Timing,PNT)的导航手段难以满足复杂无人场景导航连续性、抗干扰等方面的需求。PNT体系需对空间、空中、地面、水面、地下、水下形成全覆盖,以满足深空航天器、近地航天器、飞机、车辆、舰船、地下作业、水下潜航器等多种用户PNT需求,具有更强可用性、鲁棒性和导航能力。因此,PNT系统效能是一个综合指标,反映了系统效能和性能的全面综合能力。
随着传感器性能、移动计算能力、人工智能水平、系统集成度等方面的迅速提升,无人系统取得了长足的进步。无人系统由众多装备组成,每种装备所需PNT服务手段也不同,且各PNT服务手段间存在多种关联关系,是一个复杂大系统。梁桂林等在分析我国遥感卫星地面系统的运行管理模式及其特点的基础上,提出了采用效能评估方法对遥感卫星地面系统的体系效能进行建模,验证了模型的有效性。范亚军等针对北斗复杂场景,提出了自适应导航数据融合算法。目前尚无文献在可用PNT服务手段范围内,针对定位精度、定姿精度、授时能力、计算量、抗干扰、体积质量等不同层次不同维度的需求对PNT导航手段的组合及权重的影响,建立优选策略,指导算法设计师进行算法优化,辅助指挥员优化对战指挥策略,提供更有价值的导航解决方案。
本文对无人系统可用导航手段进行了深入研究,采用可用度(Availability)、可信性(Dependability)和能力(Capability),即ADC效能评估思想体系和评估流程,从系统工程思想出发,基于确定的系统目标和准则,构建无人系统PNT导航手段优选策略体系,并通过层次分析法(Analytic Hierarchy Process,AHP)模糊层次的分析,对体系指标进行量化,最后将该方法应用于典型无人机装备。
1 ADC效能评估思想及优选策略体系
1.1 ADC效能评估思想
ADC效能评估模型是一种典型的武器系统效能评估模型,在20世纪60年代中期由美国武器系统效能咨询委员会提出,将武器系统效能作为系统的可用度、可信性和能力的函数来进行研究,并给出了具体的数学公式。效能的计算分解成可用性向量、可信性矩阵及能力矩阵, 通过这3个指标可以计算出系统实际能力与任务要求能力的匹配程度,即ADC 效能评估模型,如下所示=(1)
式中,为系统效能总值;为系统可用性,即表示任务开始时各种状态(概率)的向量;为系统可信性,即衡量系统在工作过程中能否持续工作的可靠性概率;为系统固有能力,即系统在特定条件下满足任务需求的能力。ADC效能评估思想和评估流程,其主要特点在于从系统工程思想出发,在确定系统目标和准则的基础上,分析构成系统的各个层次PNT服务手段的功能和相互关系,以及系统同环境的相互影响,提取影响PNT服务手段效能的关键指标。
1.2 无人机系统优选策略体系
目前,无人机主要采用惯性导航、卫星导航、无线电导航和气压高度计等PNT服务手段进行导航定位。基于ADC效能评估思想,针对各个导航手段多维度能力,建立评估体系,如图1所示。
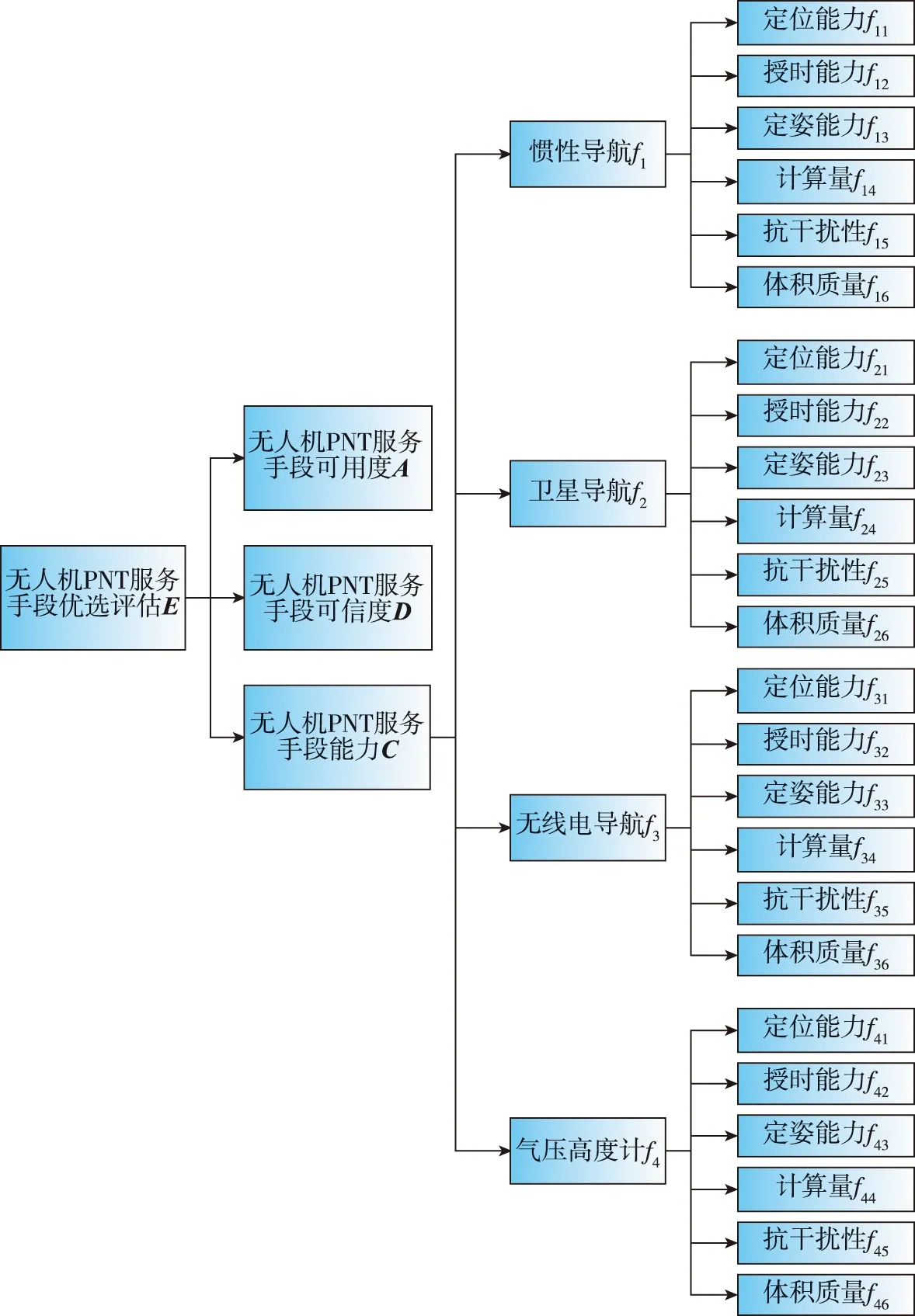
图1 ADC的筛选方法评估指标体系示意图Fig.1 ADC screening method to evaluate the index system
基于上述分析过程,结合ADC评估方法,PNT服务手段多层指标筛选方法模型可表示为
=(2)
式中,表示无人系统PNT服务手段的综合效能;表示无人系统PNT服务手段的可用度;表示无人系统PNT服务手段的可信度;=ω
f
+ω
f
+…+ω
f
表示无人系统PNT服务手段的能力;f
表示PNT服务手段定位能力;f
表示PNT服务手段授时能力;f
表示PNT服务手段定姿能力;f
表示PNT服务手段覆盖范围能力;f
表示PNT服务手段计算量能力;f
表示PNT服务手段抗干扰能力;f
表示PNT服务手段机动性能力;f
表示PNT服务手段时间要求能力;f
表示PNT服务手段体积质量要求能力;ω
,ω
,ω
,…,ω
分别为对应的能力权重系数。(1)确定可用度通常情况下,一个系统或处于工作状态,或处于故障状态(系统维护状态),本文考虑无人机系统只有工作状态和故障状态两种情况,可用度向量只有2个分量a
和a
,即:=(a
,a
)。a
和a
分别表示在典型场景下无人机PNT服务手段任意时刻处于可工作状态和故障状态的概率,有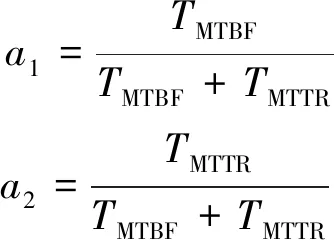
(3)
式中,T
指无人机系统的平均无故障工作时间;T
指无人机系统的平均故障修理时间。(2) 确定可信度可信度矩阵用来表征系统在执行任务过程中的特性,并以开始执行任务时系统的准备状态为建立该矩阵的前提。
若系统有n
个有效状态,则可信度矩阵为一个n
阶方阵,即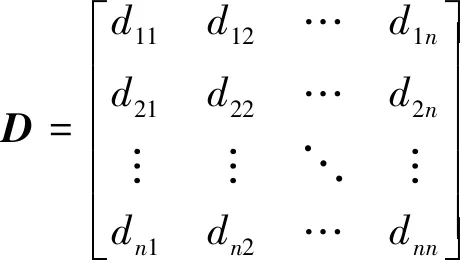
(4)
根据前面已经确定的可用度矩阵,典型无人机系统PNT服务手段处于两种状态,则可信度矩阵由4个元素构成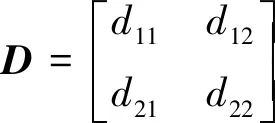
(5)
式中,d
为PNT服务手段开始执行任务时处于可工作状态、完成任务时处于可工作状态的概率;d
为开始执行任务时处于可工作状态、完成任务时处于故障状态的概率;d
为开始执行任务时处于故障状态、完成任务时处于可工作状态的概率;d
为开始执行任务时处于故障状态、完成任务时处于故障状态的概率。本文主要按照一般可修复系统,平均无故障时间和平均修复时间服从指数分布的基本规律确定中元素的计算方法。(3)确定单个导航手段能力单个导航手段能力是确定系统性能的依据,又是系统性能的集中体现。2 AHP量化评估方法及PNT优选策略应用
本文选用AHP和模糊评估法对ADC效能评估模型中的进行量化处理。2.1 AHP模糊量化评估方法
AHP是由Thomas L.Saaty在20世纪70年代正式提出,用来解决复杂的多重标准决策问题。它将较为复杂、模糊的问题分解成若干个层次,然后利用较少的、可以被量化的信息对需要决策的问题进行处理,得到一个被量化的目标结果,从而为复杂的问题提供较为简单的决策结果。AHP较好地体现了定量与定性分析相结合的思想,具有简便、灵活以及实用等特点。
模糊分析法是一种把定性的指标转化为定量的指标,从而对评价对象做出一个总的评价的方法,它是基于模糊数学中的隶属度理论。模糊评价法的显著优点在于:以最优的评价因素为基准,其评价值为1,其余欠优的评价因素的评价值则依据欠优的程度得到;可以根据各种评价因素的总体特征确定隶属度函数,确定该函数的方法有F统计法等,当然也可以请有经验的专家直接进行评价。模糊评价法是一种定性与定量相结合的方法,它可以通过扩大信息量,使评价数度得以提高,评价结论可信。如果要解决新的领域产生的新的问题,使用该方法是最合适不过的了。
从指标体系的结构看,基于多维多层的PNT优选策略效能评估指标体系共3层。在进行评估计算时,从底层开始逐层进行评估计算,根据模糊综合评判的计算步骤,把一级指标层对目标层的评判作为第一级评判,把二级指标层对一级指标层的评判作为第二级评判。
2.2 PNT优选策略AHP模糊量化
本文选用AHP和模糊评估法对单个导航手段能力进行量化处理,对于单个导航手段的多维度指标存在难以量化的因素,每个因素对系统评估结果的影响各不相同。针对PNT服务手段优选评估具有确定与不确定以及模糊与精确因素的实际情况,模糊综合评判方法提供了解决思路。其具体步骤如下:(1)建立PNT服务手段能力基于典型无人化场景下PNT服务手段效能评估指标体系,由图1可得
={ω
,ω
,ω
,ω
,ω
}={
f
,f
,f
,f
,f
,f
}={
f
,f
,f
,f
,f
,f
}={
f
,f
,f
,f
,f
,f
}={
f
,f
,f
,f
,f
,f
}(6)
(7)
其中,为模糊关系矩阵(可以表示定位、授时、定姿、计算量、抗干扰性或者信号连续性等问题);矩阵元素r
表示不同PNT导航手段r
(i
=1代表惯性导航、i
=2代表卫星导航、i
=3代表无线电导航、i
=4代表气压高度计)对于定位、授时、定姿、计算量、抗干扰性、信号连续性等问题,两两对比其重要程度得到的模糊数值,如惯性导航与惯性导航比较可得r
,惯性导航与卫星导航比较可得r
,以此类推得到矩阵。(2)确定评价语等级集合={v
,v
,v
,v
,v
}={优秀,良好,中等,较差,极差} ={ 0.95,0.85,0.7,0.5,0.2}。其中,“优秀”∈[0.9,1.0],“良好”∈[0.8,0.9],“中等”∈[0.6,0.8],“较差”∈[0.4,0.6],“极差”∈[0,0.4]。根据指标相对重要性,由专家进行两两评判,形成判断矩阵,并对判断矩阵进行求解,可以得到各指标层的相对权重。
为了描述元素r
两两比较的重要程度,需建立一种从0.1~0.9的模糊判断尺度,如表1所示。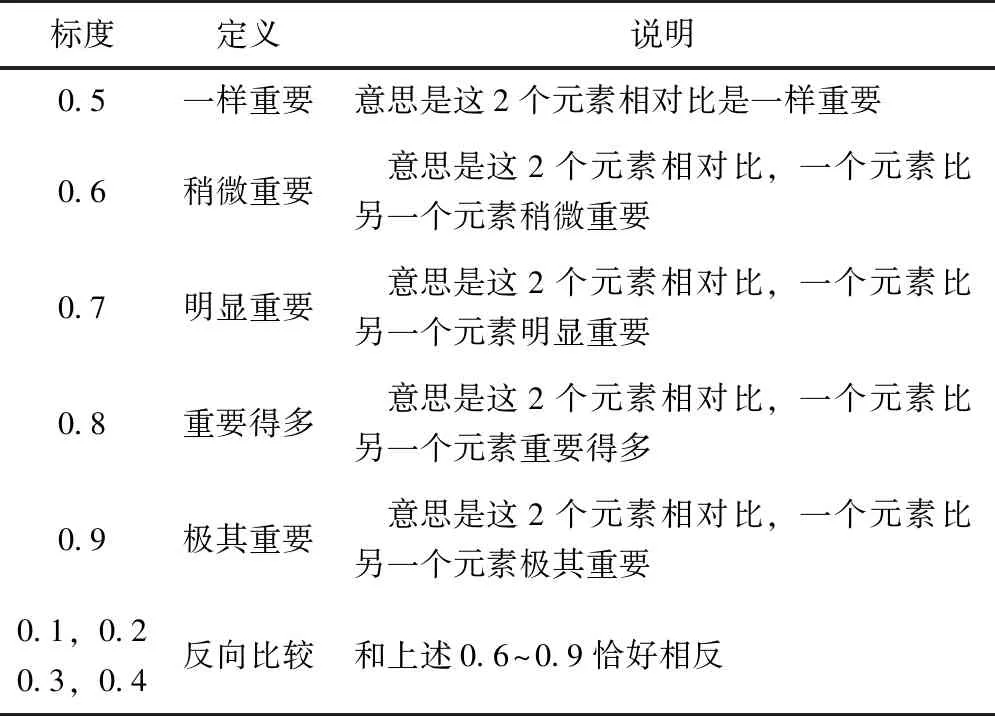
表1 从0.1~0.9的判断尺度Tab.1 A judgment scale from 0.1 to 0.9
(3)基于AHP 法确定评判权重向量通过AHP方法获取矩阵,并进行一致性检验。确定中的各因素的权重矩阵={ω
,ω
,…,ω
},且是上的模糊子集,满足
(8)
根据模糊综合评判理论,对模糊评估矩阵进行合成运算。
=(9)
式中,为模糊关系矩阵;为权重矩阵;为模糊评判矩阵,由模糊合成运算得到,可以采用多种算子。这里下标i
=1,2,3,4分别表示惯性导航、卫星导航、无线电导航、气压高度计等四种PNT导航手段。本文采用的加权平均法,即普通矩阵相乘。能力综合值c
的计算方法是将任意一种PNT导航手段的模糊评判矩阵与其相应的评价集合相结合(表示某一种PNT导航手段的评价集合)。文中研究的四种PNT导航手段(惯性导航、卫星导航、无线电导航、气压高度计)的综合能力值c
的评分计算如下
(10)
3 无人机系统的典型案例分析
为验证多维多层立体指标PNT优选策略和效能评估模型的有效性,本文以无人机系统为评估案例,应用已建立的评估模型,对其PNT优选策略综合效能进行评估,并对评估结果进行综合分析。
3.1 计算可用度矩阵A
无人机系统故障主要包括陀螺仪故障、加速度计故障、接收机故障、气压高度计故障等,由最小T
决定。一般情况下整个系统的平均故障时间大于1000h,基层级修复时间小于1h,故

3.2 计算可信度矩阵D
无人机系统PNT服务手段处于可用和故障两种状态,故可信度矩阵如下
3.3 计算能力矩阵C
根据专家调查法得到指标权重表。邀请4名专家对该系统进行评分,每位专家权重为0.25,为便于最后得到一个单一的综合评价指标,对评价指标分为5个等级,分别如下:优秀,良好,中等,较差,极差。设r
表示惯性导航,r
表示卫星导航,r
表示无线电导航,r
表示气压高度计,则r
表示惯性导航相较于卫星导航对定位、授时、定姿、计算量、抗干扰性、信号连续性等问题的重要程度,其他以此类推。将其按照指标结构分别评判准则层和指标层,再基于AHP 得出判断矩阵。如表2及表3所示。
表2 不同评判等级的评分等级表Tab.2 Judgment matrix of each navigation method
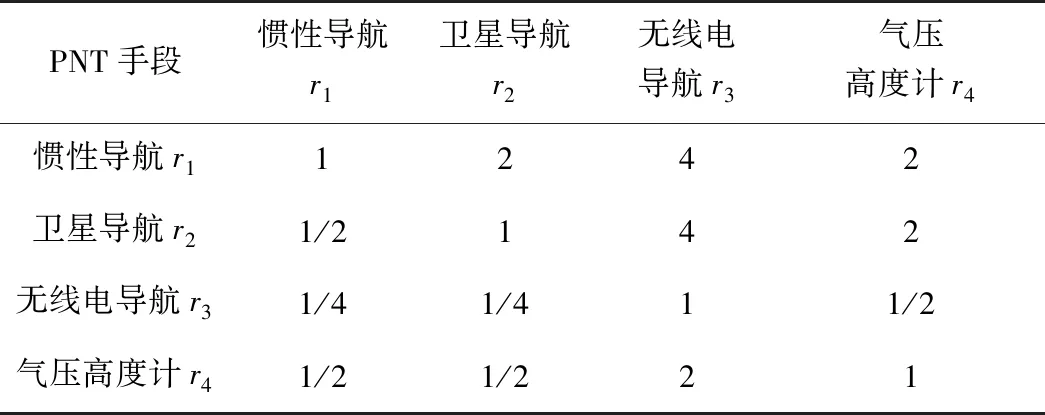
表3 各个导航手段判断矩阵Tab.3 Judgment matrix of each navigation method
(1)判断矩阵
以惯性导航手段为例,分析其PNT判断矩阵及权重求解,如表4所示。
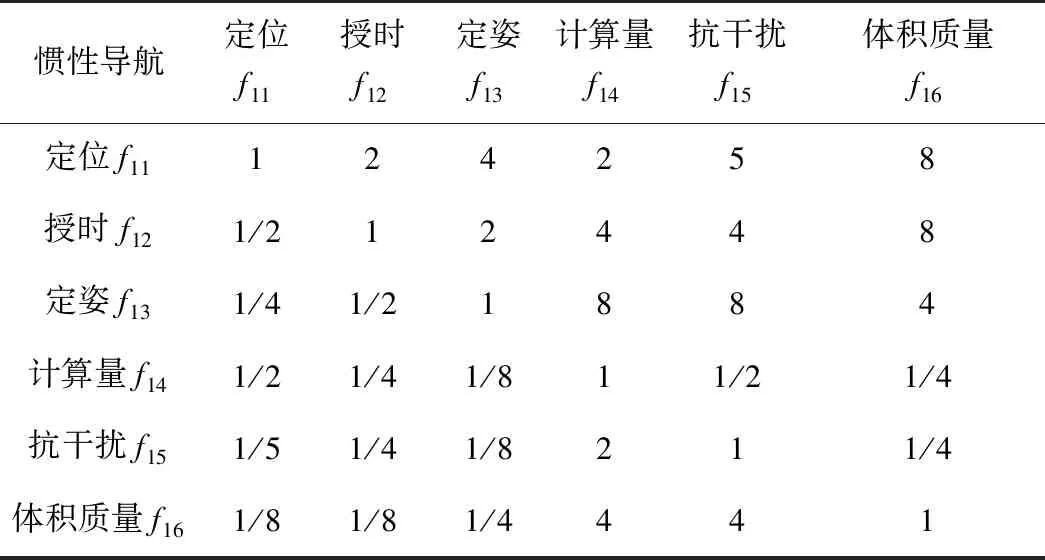
表4 惯性导航的多维多层立体指标判断矩阵Tab.4 Multi-dimension multi-layer index judgment matrix for inertial navigation
由此,根据表4数据可以得出惯性导航准则层对目标层的多维多层立体指标的判断矩阵为
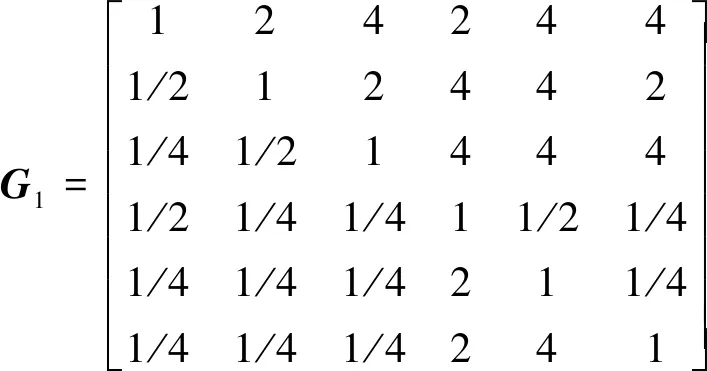
卫星导航准则层对目标层的多维多层立体指标的判断矩阵为
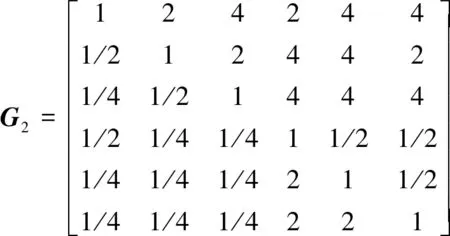
无线电导航准则层对目标层的多维多层立体指标的判断矩阵为
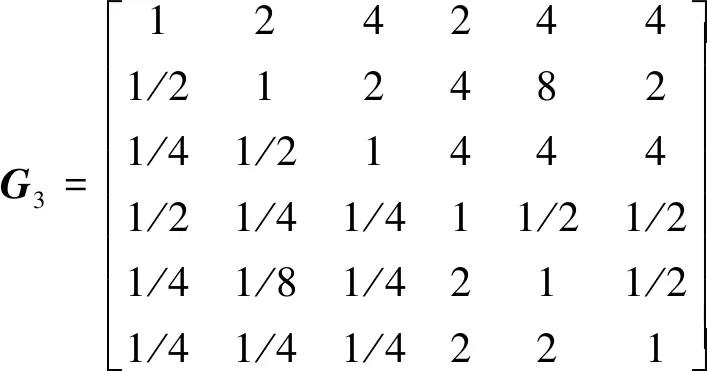
气压高度计导航准则层对目标层的多维多层立体指标的判断矩阵为
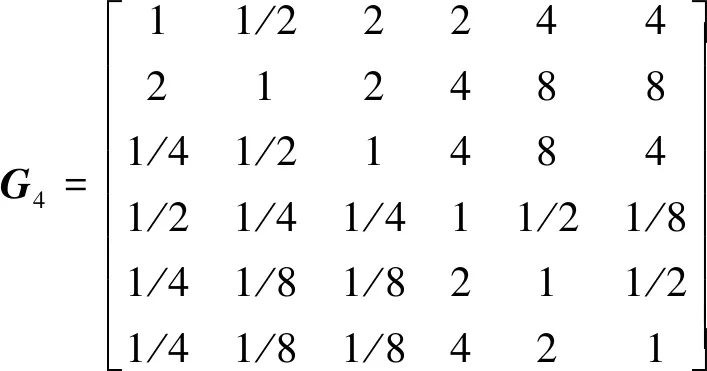
其他导航手段类似。
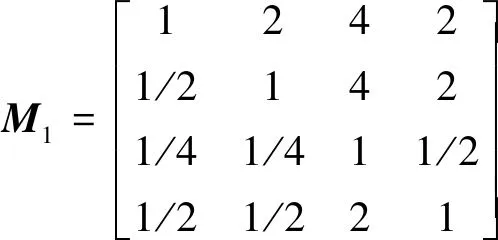
由此,根据表2数据可以得出PNT导航手段准则层对目标层PNT优选策略的判断矩阵为
(2)计算权重
各个导航手段的权重就是根据中和法求出最大特征值λ
和特征向量,对特征向量进行归一化处理,并进行一致性检验,满足要求的特征向量即为计算权重。由惯性导航所得矩阵,根据中和法求出λ
和特征向量,并进行一致性检验。对于惯性导航矩阵:λ
=6.5862,对应特征向量为=[0.
7391,0.
4651,0.
4034,0.
1256,0.
1262,0.
2073]归一化处理为
=[0.
3577, 0.
2250,0.
1952,0.
0608, 0.
0611 , 0.
1002]进行一致性检验,一致性指标C
=0.11724, 经修正后C
=0.0862<0.1,一致性良好。同理,对于卫星导航矩阵:λ
=6.4522,对应特征向量为=[-0.
7409,-0.
4745,-0.
4004,-0.
1360,-0.
1319,-0.
1723]归一化处理为
=[0.
3603,0.
2308,0.
1948,0.
0661,0.
0642,0.
0838]进行一致性检验,一致性指标C
=0.
09044, 经修正后C
=0.0665<0.1,一致性良好。同理,对于无线电导航矩阵:λ
=6.5695,对应特征向量为=[-0.
7171,-0.
5308,-0.
3803,-0.
1311,-0.
1230,-0.
1643]归一化处理为
=[0.
3504,0.
2594,0.
1858,0.
0641,0.
0601,0.
0802]进行一致性检验,一致性指标C
=0.
1139, 经修正后C
=0.0904<0.1,一致性良好。同理,对于气压高度计矩阵:λ
=6.5491,对应特征向量为=[-0.
4446,-0.
7603,0.
4221,-0.
1058, -0.
0991,-0.
1587]归一化处理为
=[0.
2233,0.
3819,0.
2120,0.
0571,0.
0531,0.
0797]进行一致性检验,一致性指标C
=0.
1098, 经修正后C
=0.0871<0.1,一致性良好。导航手段准则层对目标层PNT优选策略的判断矩阵:λ
=4.0606,对应特征向量为=[0.
7650,0.
5383,0.
1581,0.
3162]归一化处理为
=[0.
43040,0.
3028,0.
0889,0.
1779]进行一致性检验,一致性指标C
=0.0151, 经修正后C
=0.0751<0.1,一致性良好。(3)计算能力向量根据步骤(2),可得综合权重,如表5所示。
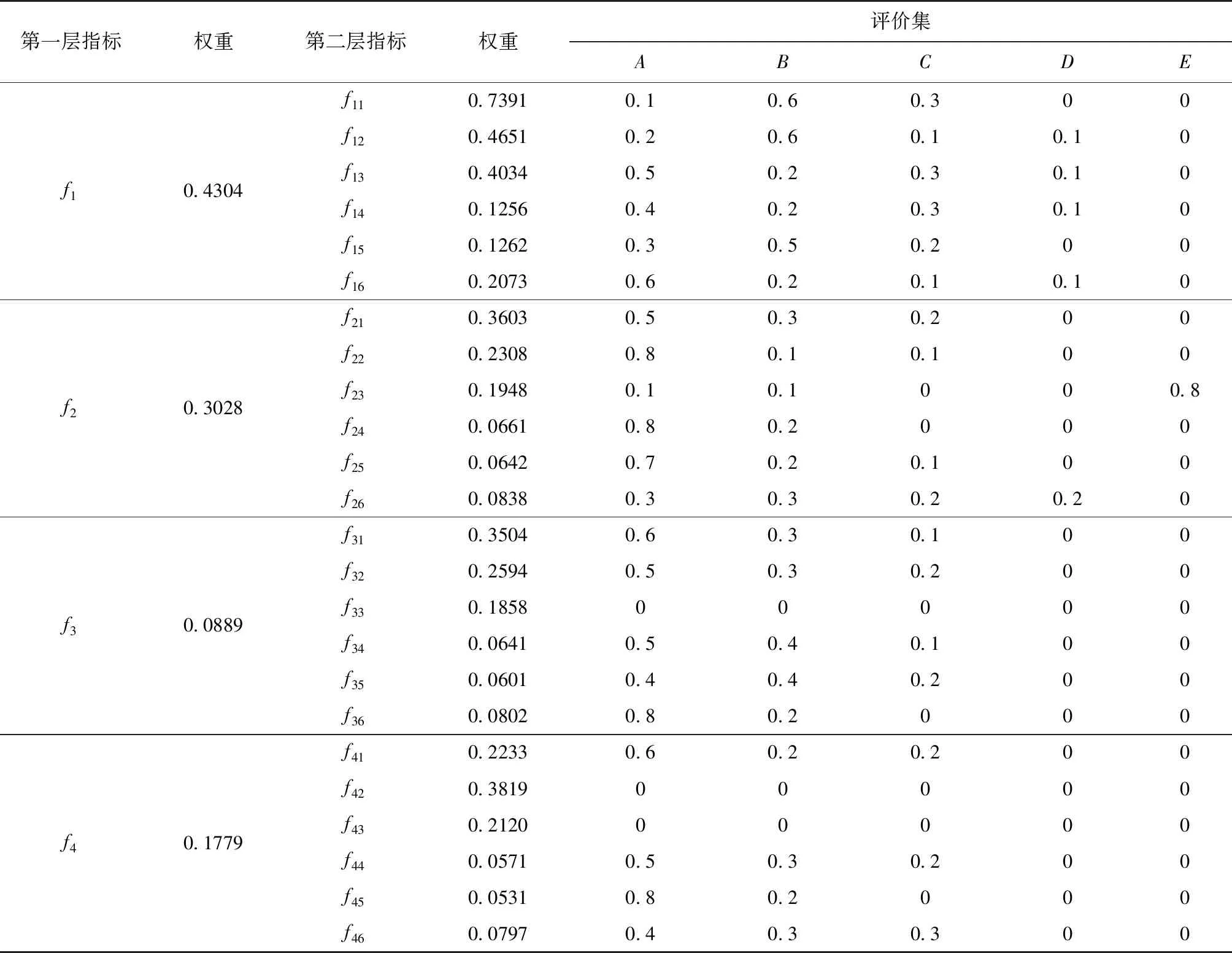
表5 无人机系统PNT导航手段的判断矩阵及权重求解Tab.5 Judgement matrix and weight solution of PNT navigation method for UAV system
按照表5 中的统计结果,基于模糊关系合成原理,利用加权平均算子,进行合成运算
=[0.
4981,0.
3611,0.
2868,0.
0899,0.
0885,0.
1359]利用灰类等级值法得到该系统的单一综合评价值,计算可得能力矩阵
(4)计算综合效能
根据ADC评估模型,系统效能的计算为
4 结 论
针对多维多层立体指标PNT优选策略,需考虑用户场景、导航手段等问题,基于无人机系统四种导航手段,通过表5数据可知,f
表示惯性导航,f
表示卫星导航,f
表示无线电导航,f
表示气压高度计。从第一层权重指标可以看出,惯性导航相对于其他导航手段的权重为0.4304,卫星导航相对于其他导航手段的权重为0.3028,惯性导航与卫星导航权重相对比较多,与实际测试中它们作为主要导航手段相符。第二层权重指标表示单个导航手段的性能。通过本文所提的方法计算可得:四种PNT导航手段多源融合的定位能力的定量评估值为0.4981,授时能力为0.3611,定姿能力为0.2868,计算量能力为0.0899,抗干扰能力为0.0885,体积质量为0.0885。指挥员基于理论数据的支撑,根据当前PNT导航手段多源综合能力,能够更加可靠、实时、安全地调整PNT手段的优选决策任务。虽然本文所提的模型可行,但仍存在一些不足之处,有待进一步研究解决:
1)对于指标权重的选取客观性不够;
2)用户环境因素更加复杂多变,导航装备效能不止两种状态;
3)如何更好地解析能力向量,还有待进一步加强。