井架攀爬机器人设计与分析
2022-01-17竹锦霞
涂 朴,严 鹏,竹锦霞,夏 林,何 洁
(1.四川文理学院智能制造学院,四川 达州 635000;2.贵州航天天马机电科技有限公司,贵州 遵义 563000;3.中国石油集团川庆钻探工程有限公司,四川 成都 610213)
0 引言
作为起升系统的支撑体,石油井架的安全性与稳定性在很大程度上影响着石油钻采的进程。由于石油钻机井架恶劣的作业环境以及搬迁、安装等过程中其他不可抗拒因素的影响,石油井架主体钢架结构会逐步产生不同程度的腐蚀、磨损、疲劳和变形等局部或整体缺陷。这些缺陷将严重降低石油井架的工作寿命、工作效率、承载能力、生产安全系数等综合性能,为钻井、修井作业带来严重的安全隐患[1]。
为使井架损伤能够被及时发现和修复,以免酿成生产事故,保证生产的正常运行,需要定期对石油井架进行相关安全评定。就井架安全评定而言,国外目前主要侧重于外观勘察、简易诊断、一般处理与预防这3个方面。其中,外观勘察主要是针对明显缺陷,例如截面锈蚀、杆件初始弯曲、井架整体初变形、节点刚性降低等[2];简易诊断多侧重于定性分析;处理与预防局限于井架理论分析和测试研究的基础。在国内,对结构的研究要么是以强度、刚度、稳定性理论为主的评定理论,要么是可靠性评定理论和模糊评定理论。因为井架结构本身相对复杂,且缺陷相对多样,所以难以获得精确评定结果的方法。因此,在实际工程中是通过井架现场承载试验测取井架的应力、位移及结构动态特性,并根据现场测试结果采用安全评定理论以线性外推的方法确定在用井架的安全承载能力[3]。但此种方法费时耗力。
此外,井架立柱缺陷作为影响井架承载能力的最大因素,存在着一种“隐形”的缺陷[4]——内蚀:若主立柱是管柱型材且存有孔隙,雨水就有可能通过孔隙渗透到立柱内部,从而产生封闭锈蚀,在雨水锈蚀作用下,立柱壁会变薄。目前,陆地应用较广的是K 形井架[5]。K形井架受载时,其最大受力部位为井架大腿。井架大腿的强度大小决定整个井架的承载能力。若其井架大腿发生局部杆件截面锈蚀,会使得截面尺寸减小,从而引起大腿应力的变化,进而影响整个井架的稳定性[6]。因此,对井架大腿内部锈蚀进行检测显得尤为重要。随着探伤科技的飞速发展,越来越多的无损探伤设备应用在各种工程领域。这些检测设备不仅可以检查出肉眼无法察觉的工件内部缺陷,也可以极大地提高检查的准确性和可靠性。
本文研究的目的在于设计一种攀爬机器人,以携带检测设备仪器对井架主立柱进行探伤,检测出“隐藏”的缺陷。
1 机器人结构与步态
1.1 机器人结构
本文主要以JJ225/45-K型井架为攀爬对象完成相关设计。该井架高度为45.2 m,井架大腿采用320 mm×200 mm×5 mm的矩形钢,钢架整体采用Q345钢材[6]。机器人结构如图1所示。
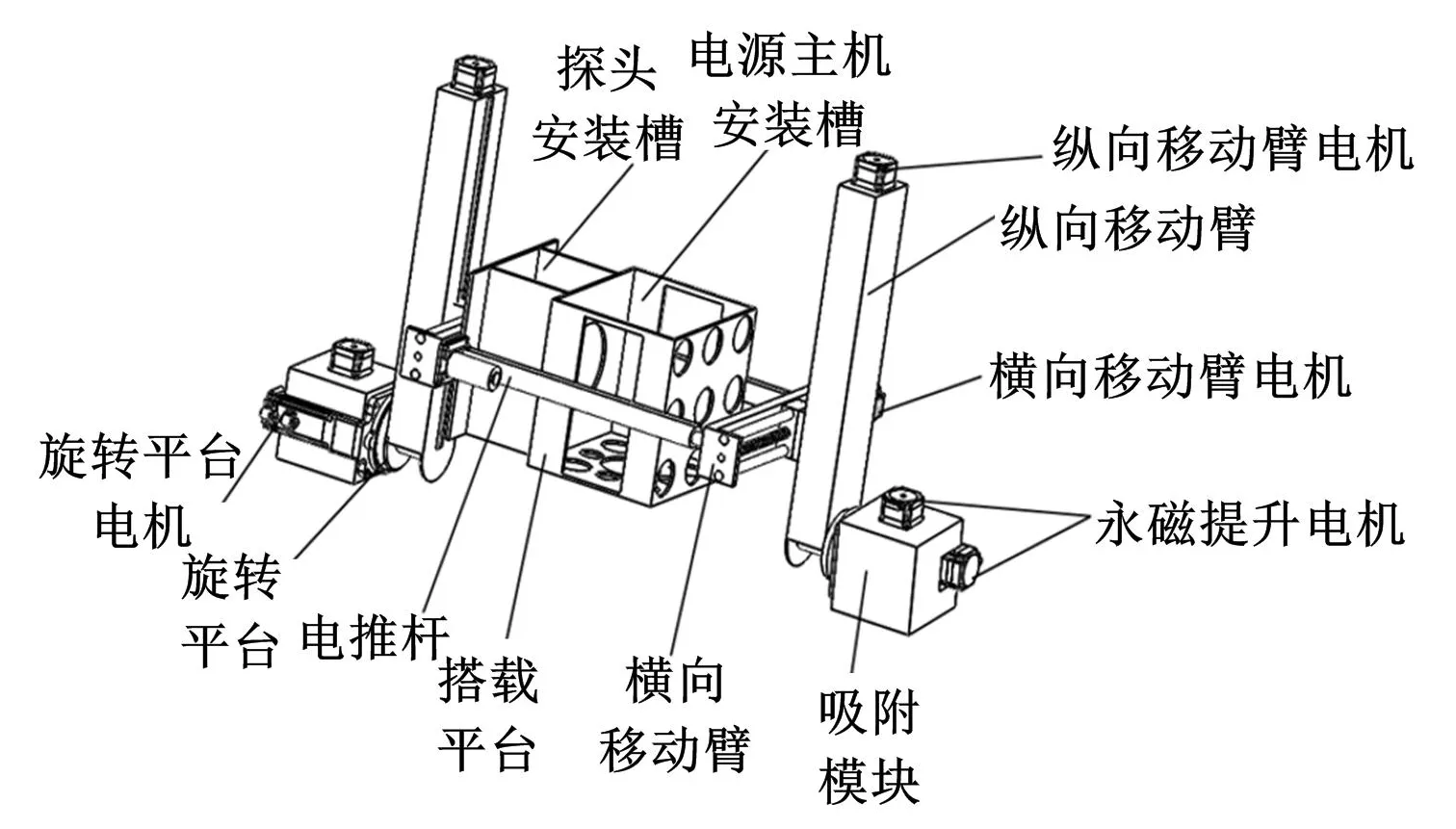
图1 机器人结构示意图Fig.1 Schematic diagram of robot structure
该机器人主要由吸附模块、旋转平台、电推杆、搭载平台、横向移动臂、纵向移动臂等部件组成。整个机器人呈对称布置。其攀爬动力源为搭载平台两侧的电推杆。旋转平台的作用在于:①空间翻转步态中为两侧纵向移动臂提供摆动输出;②控制吸附模块的吸附面朝向攀爬面。纵向移动臂用于越障步态与空间翻转步态的姿态调节;横向移动臂用于空间翻转步态姿态调节以及正常攀爬步态偏移修正。
1.2 机器人三种步态
1.2.1 正常步态
机器人正常步态如图2所示。初始时,两足均处于吸附状态,如图2(a)所示;随后,前吸附足停止吸附,并与搭载平台共同运动至极限位置,如图2(b)所示;接着,前吸附足吸附,后吸附足释放,后吸附足回收至极限位置,如图2(c)所示;如此往复循环,即实现整个攀爬过程。

图2 机器人正常步态示意图Fig.2 Schematic diagram of normal gait of robot
1.2.2 越障步态
当机器人临近凸起的段与段或杆与杆之间的螺栓连接区域时,可以采用越障步态直接越过障碍。机器人越障步态如图3所示。其运动过程如下。
①在纵向移动臂的作用下,搭载平台被上举到一定高度,如图3(a)所示。
②前吸附足提升至可以越过障碍物的高度,如图3(b)所示。
③在推杆推力的作用下,前吸附足向前移动并跨过障碍物,如图3(c)所示。
④后吸附足与障碍物之间还存在一定的距离,需要采用正常攀爬步态进行攀爬过渡,直到后吸附足攀爬到合适的越障位置,如图3(d)所示。
⑤后吸附足运动至合适的越障位置后,采用与前吸附足一样的越障方式进行障碍,如图3(e)所示。
⑥双吸附足均吸附在攀爬面上,搭载平台下放,完成整个越障过程,如图3(f)所示。

图3 机器人越障步态示意图Fig.3 Schematic diagram of robot obstacle climbing gait
1.2.3 空间翻转步态
当机器人攀爬至横撑杆与主弦杆相连接处时,无法继续进行直线攀爬,需要通过空间翻转步态来越过阻碍。机器人空间翻转步态如图4所示。
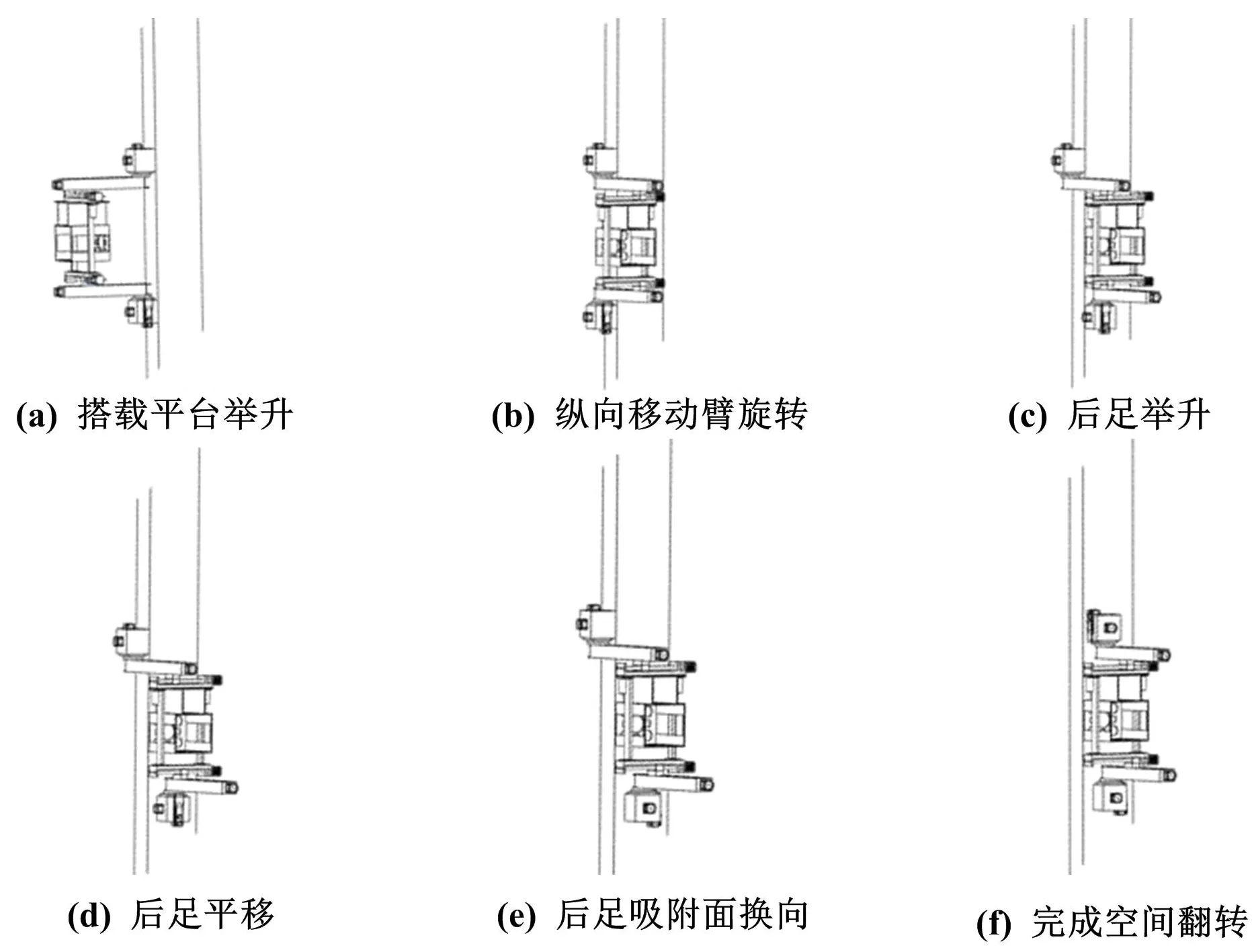
图4 机器人空间翻转步态示意图Fig.4 Schematic diagram of the robot spatial flipping gait
机器人运动过程如下。
①搭载平台在电机作用下沿纵向移动臂抬升至指定位置,如图4(a)所示。
②首先,纵向移动臂在旋转平台的作用下带动搭载平台旋转90°。然后,搭载平台在丝杆导轨作用下,沿横向移动臂移动,如图4(b)所示。
③后吸附足在纵向移动臂的作用下进行抬升,离开原吸附面,如图4(c)所示。
④在横向移动臂的作用下,后吸附足模块移动至新攀爬面的合适位置,如图4(d)所示。
⑤在旋转平台的作用下,后吸附足吸附面旋转至新攀爬面并吸附,如图4(e)所示。
⑥前吸附足参照相同的流程完成换面吸附,至此完成换面攀爬,如图4(f)所示。
2 静力学分析
2.1 永磁体排布方式选择
永磁体的数量、大小与布置形式在很大程度上影响着整个吸附模块的性能。吸附模块中永磁体的基本布置形式有环形布置、矩形布置与直线布置。采用环形布置的吸附模块,其永磁体的形心位于同一个圆上,结构比较紧凑;采用矩形布置的吸附模块在两个正交方向的抗倾覆性能相差较大;采用直线布置的吸附模块是单方向永磁体,形心都在一条直线上,当机器人进行侧面翻转换向时,发生倾覆的可能性最大。因此,本文所设计的攀爬机器人的吸附模块中永磁体采用环形布置。典型的环形布置如图5所示[7]。

图5 典型的环形布置示意图Fig.5 Typical annular arrangement
在确定的吸附支撑状态下,攀爬机构吸附模块的抗倾覆承载能力为[8]:
(1)
式中:FS为磁体的吸附力;R0i为向量R0的元素,i=1,2,...,n,n为R0的元素个数。
R0=A-1Q0
(2)
式中:矩阵A为与工作磁块位置(xi,yi)有关的矩阵,n×n;Q0为单位载荷向量,n×1;R0为n×1的向量。
通过MATLAB求解得到的单位圆下单位力抗倾覆能力求解结果如表1所示。

表1 单位圆下单位力抗倾覆能力求解结果Tab.1 Solution results of anti-overturning capacity of unit force under unit circle
由计算结果可以看出,采用六边形布置的抗倾覆能力明显大于其他几种形式。但考虑到加工成本、吸附模块大小和能耗问题,拟采用4个吸附磁块,经过比较最终采用正方形布置。
2.2 抗滑移力学分析
在整个攀爬过程中,当前足或后足进行单一吸附时,即机器人在蠕动前进的过程中,发生滑移的可能性最大。因为整体结构的对称性,无论是前足吸附还是后足吸附,吸附模块提供的吸附力所产生的摩擦力克服的重力是相同的。对后足吸附、前足释放的状态进行力学分析。单足吸附时机器人受力情况如图6所示。
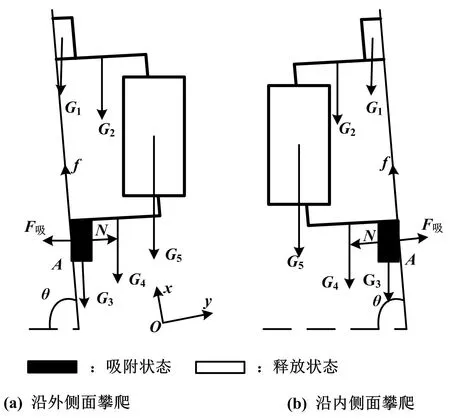
图6 单足吸附时机器人受力情况Fig.6 Force of robot during single foot absorption
若机器人不发生滑移,则有:
(3)
如图6(a)所示,当机器人沿外侧面攀爬时,有:
(4)
如图6所示,当机器人沿内侧面攀爬时,有:
(5)
式中:G1为前吸附足重力大小;G2为前纵向移动臂重力大小;G3为后吸附足重力大小;G4为后纵向移动臂重力大小;G5为搭载平台与搭载物体重力大小;F吸为后足吸附力大小;N为攀爬面对机器的支撑力大小;f为后足与攀爬面之间的摩擦力大小。
2.3 抗倾覆力学分析
发生倾覆的可能性最大的情况也是单足吸附。在单足吸附时有两种空间姿态容易发生倾覆。其一是攀爬过程中前足释放、后足吸附。此种情况容易使机器人在自身重力作用下绕其后吸附足下端线发生倾覆。其二是机器人在进行空间翻供过程中,绕其后吸附足中的永磁体发生旋转倾覆。下面对这两种情况分别进行受力分析。
情况一力矩分析简图如图7所示。情况一:图7(a)情况发生倾覆的可能性最大,且机器人整体将绕坐标系z轴产生旋转趋势。若发生倾覆,则必须先将吸附足中的上排永磁体掀起。其受力简图如图7(b)所示。

图7 情况一力矩分析简图Fig.7 Schematic diagram of torque analysis for Case 1
为使机器人不绕坐标轴z发生倾覆,则需:
(6)
式中:L1为后纵向移动臂重心到攀爬面的距离;H为后吸附足模块高度;L2为搭载平台与搭载物体的重心到攀爬面的距离;L3为吸附足中上排永磁体吸附中心到吸附足模块最底端的距离;L4为上部分重心到吸附足上端线的距离;G=G1+G2+G5
情况二:若机器人在进行空间翻转时,其后吸附足中的永磁块发生旋转倾覆,最大的可能性是机器人在垂直位置上绕吸附足中左侧某一永磁体发生旋转。因为排列特殊性,上下平衡式相同,以左侧上的永磁体中心为原点建立坐标系。情况二力矩分析如图8所示。

图8 情况二力矩分析简图Fig.8 Schematic diagram of torque analysis for Case 2
要若使机器人整体不绕坐标轴y发生旋转,则有:
f(2l1+l2)-G4L1-Gl3=0
(7)
式中:f为摩擦力f1、f2、f3的大小;l1为永磁体的中心距;l2为对角两个永磁体的中心距离;l3为搭载平台与搭载物体的重心到原点O的距离。
尺寸参数:L1=357.5 mm,L2=435 mm,L3=170 mm,L4=524 mm,l1=140 mm,l2=198 mm,l3=535 mm,H=200 mm。
重力参数:G1=78.40 N,G2=37.24 N,G3=78.40 N,G4=37.34 N,G5=238.14 N。
通过式(4)~式(7)所列出的平衡式,取静摩擦系数μ=0.85,最终得到机器人不发生滑移与倾覆所需的最小吸附力为2 242.30 N。
3 机器人运动学分析
3.1 D-H参数坐标
将所设计的机器人视为一个连杆机构。该机构共有8个连杆、2个旋转关节和5个移动关节。为方便建立坐标系,将其等效简化为连杆结构图,取初始状态为:纵向移动臂滑块处于纵向移动臂底部,横向移动臂滑块处于中部,且两吸附足处于同一轴线上。以一端吸附足的中心为基座标,建立坐标系。等效连杆坐标系如图9所示。进一步由图9可以得到D-H参数表,如表2所示。

图9 等效连杆坐标系Fig.9 Equivalent linkage coordinate system
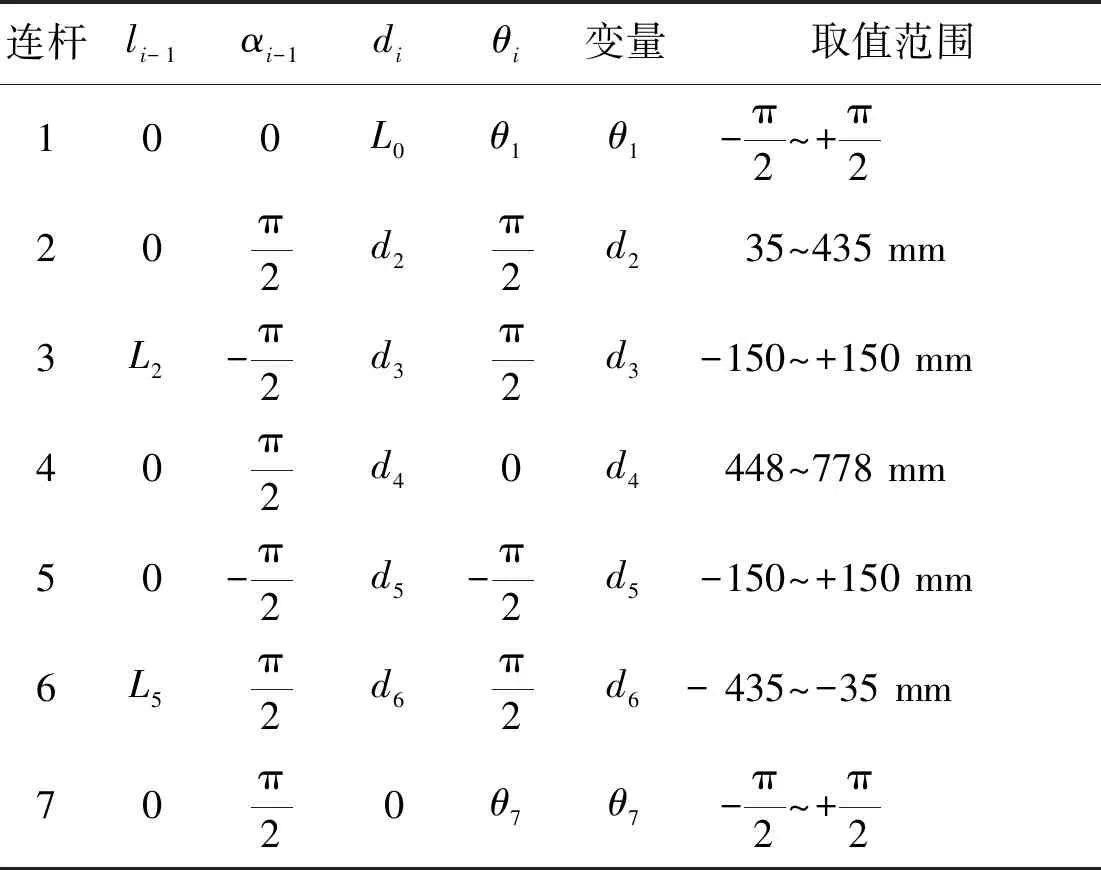
表2 D-H参数表Tab.2 D-H parameter table
3.2 正运动学求解
改进D-H法中,连杆变换可以通过4个基本坐标变换得到。其中,每个基本坐标变换只依赖于一个连杆参数,可以通过下面四个基本坐标变换依次得到。
①Oi-1坐标系绕xi-1轴旋转ai-1。
②Oi-1坐标系沿xi-1轴移动ll-1。
③Oi-1坐标系沿zi轴旋转θi。
④Oi-1坐标系绕zi轴转动di。
则从Oi坐标系到Oi-1坐标系的变化矩阵为:
(8)
基于此,坐标系{n}相对于{0}的齐次变换可表示为几个相邻齐次变换连乘的形式:
(9)
3.3 逆运动学求解
逆运动学是指在末端位置确定的情况下求出关节变量的变化大小。逆运动学的解比较复杂,即使处于同一个位置和方位的末端也可能存在多个解,甚至当末端处于某些特殊位置时还会出现无解的情况[9]。在已知末端位姿变换矩阵的情况下,求解其关节变量的值的过程称之为运动学反解。根据矩阵相乘原理,有:
(10)
代入相关矩阵,求解得到:
(11)

将式(11)代入正运动学求得的位姿变换矩阵(1,1),可求得:
(12)
(13)

(14)
由矩阵元素(3,4)相等,可得:
pxsinθ1-pycosθ1-d2=d6
(15)
结合式(14)中左右矩阵(2,4)元素相等可以看出,d2和d6之和是一个固定值,但二者的解却不唯一。同理,结合式(5)~式(12)中左右矩阵(1,4)元素相等,可以看出d5和d3之和也是一个固定值,即d5+d3=-pxcosθ1-pysinθ1,但二者的解也不唯一。因此,不再对d5和d3进一步求解。
4 机器人的运动空间分析
分析机器人的运动空间是机器人研究设计过程中的一个重要步骤,同时运动空间也能用于评价机器人是否具有灵活的姿态。运动空间通常被视为关节空间变量与运动空间的映射,表示为:
W(P)={P(q):q∈Q} ⊂R3
(16)
式中:W(P)为运动空间;P(q):q(G)为运动学正解的位置分量;q为广义关节变量;R3为三维空间。
现在求解机器人的运动空间的方法总体上分为三种:解析法、图解法以及数值法。解析法通过反复包络求取空间边界曲线,可以采用函数精确地表达出空间边界,但其表达式复杂,因此多适用于关节数≤3的机器人。图解法以几何图形绘制的方式求取空间边界,其优势在于直观性较强,但处理多关节机器人时需要进行特殊的分组处理。数值法利用计算机的计算与图形处理能力求取机器人空间边界曲面上的特征点,进而构成边界曲线,绘制出边界曲面。其缺点是计算量较大。但随着计算机技术的飞速发展,该方法在求取运动空间方面的优势愈发突出[10]。本文采用数值法中的蒙特卡洛法进行机器人的运动空间求解。蒙特卡洛法的原理如式(16)所示,其实质在于对关节变量采用均匀分布进行随机组合,即给予一定数量的符合关节变化范围要求的随机量,再利用正运动学求解的结果计算出末端坐标值。这些坐标值所在的范围区间近似地模拟了机器人末端的运动空间。换而言之,随机变量取得越多,越能模拟出实际的运动空间。主要步骤如下。
①根据正运动学所求得的结果,确定末端相对于固定坐标系的位置向量。
②采用均匀分布在各个关节变量的变化范围内取个数相同的随机值,方法如下:
θi=θimin+(θi max-θi min)×Rand(N,1)
(17)
式中:θi min、θi max分别为关节i最小、最大变化量。
③将随机值数组代入式(8),确定末端相对于固定坐标系的位置向量,得到随机变量到运动空间的映射。所构成的图形即为运动空间云图。
将整体机器人视为机械臂,在不考虑井架干涉的情况下,采用MATLAB对机器人一足吸附、一足固定状态下的前足运动空间进行了求解。蒙特卡洛法求解结果云图如图10所示。

图10 蒙特卡洛法求解结果云图Fig.10 Monte Carlo method to solve the results of cloud map
由图10可以看出,机器人前足活动三维空间为一个圆柱体,x、y、z方向的范围区间分别为(-350,+350)、(-400,+400)、(672,1 002)。其范围区间大于攀爬对象尺寸,因此所设计的机器人能够灵活地规避障碍。由于所设计的机器人结构的特殊性,后足的立足点在x和y方向是与前足相吻合的;而搭载平台的运动空间是通过机器人双足立足点不断更新确定组成的。在实际攀爬过程中,d2与d3不能同时进行变动。为研究搭载平台活动空间,以搭载平台中心为末端坐标,并在d2取最大值时研究搭载平台转动空间,以及在d2取0时研究搭载平台平动空间。搭载平台转动空间和搭载平台平动空间分别如图11、图12所示。

图11 搭载平台转动空间Fig.11 Carrying platform rotation space
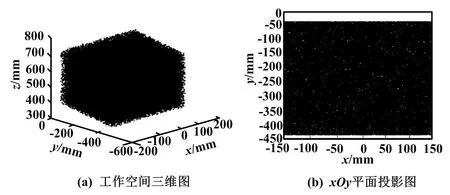
图12 搭载平台平动空间Fig.12 Carrying platform rotation space
如图11、图12所示,搭载平台的转动空间为弧形,半径为480 mm左右,远大于攀爬平面宽度,能够顺利实现摆动换面操作。平动空间为立方体,体积为400 mm×200 mm×700 mm,活动空间较大,能够实现较大范围的检测操作。
5 结论
本文以JJ225/45-K井架为攀爬对象,提出了一种井架攀爬机器人的结构。该机器人能够携带检测设备仪器对井架主立柱进行探伤。对机器人步态进行了阐述,完成了静力学平衡公式推导,并通过D-H参数法完成了机器人正运动学、逆运动学的求解,最后利用蒙特卡洛法在MATLAB中完成了对机器人的运动空间求解。研究结果表明,所设计的机器人能够灵活避障和实现空间翻转。所设计的攀爬机器人并不局限于石油井架的攀爬,可进一步根据攀爬对象的尺寸参数调节攀爬机器人的尺寸参数,进而实现多种环境下的探伤操作。
