工业机器人去毛刺平台研发路径探究
2022-01-15庄清瑶
庄清瑶


摘要: 为了提升工业机器人的自动化水平,设计人员尝试基于机器视觉系统对工业机器人系统进行优化,并对相机与工业机器人视觉系统进行标定,并以蚁群算法为基础,搭建工业机器人去毛刺平台。通过引入工业视觉系统,实现对于目标工件的在线监测,并将有关工件轮廓以及位置的信息,远程传输至工业机器人去毛刺平台,提升该平台智能化水平,有效解决零件生产加工过程中,异形工件毛刺难以去除的问题。
Abstract: In order to improve the automation level of industrial robot, designers try to optimize the industrial robot system based on machine vision system, calibrate the camera and industrial robot vision system, and build an industrial robot deburring platform based on ant colony algorithm. By introducing the industrial vision system, the on-line monitoring of the target workpiece is realized, and the information about the workpiece contour and position is remotely transmitted to the industrial robot deburring platform, so as to improve the intelligent level of the platform and effectively solve the problem that it is difficult to remove the burr of special-shaped workpiece in the process of part production and processing.
關键词: 工业机器人;去毛刺平台;蚁群算法
Key words: industrial robot;deburring platform;ant colony
中图分类号:TP242.2 文献标识码:A 文章编号:1674-957X(2022)03-0069-04
0 引言
实际生产机械零件过程中,由于加工设备柔化程度不足,或者加工参数精度的限制,导致机械零件的边缘经常会出现毛刺,特别是具有不规则形状的机械零件,其出现毛刺的概率更高。毛刺对于机械工件的加工、装配精度会产生很大的影响,同时还会影响工件的美观度。因此,机械零件去毛刺工作一直以来都是工业生产中的重点环节。传统的去毛刺方式以人工去毛刺模式为主,这种去毛刺模式不仅效率低、成本高,而且无法保证去毛刺的效果。因此,如何利用工业机器人代替人工进行去毛刺工作,就成为工业生产领域的热点问题。
1 基于机器视觉工业机器人去毛刺平台应用优势
传统去毛刺模式下,相关工人需要用视觉检测的方式观察工件外表是否存在毛刺。人工视觉检测的缺陷在于无法形成统一的标准,且长时间运用视觉检测的方式,会让工人产生疲劳感,不仅无法满足机械工件装配、加工精度要求,而且要投入大量的时间与人工,成本高昂。此外,对于一些对零件参数有着较高标准的精密零件,为了提升良率,生产者需要为工人配备更为精密的检测仪器,导致生产成本进一步提升[1]。想要解决这一问题,就要积极尝试用工业机器人代替人工进行去毛刺工作,其基础就是要利用机器人视觉取代人工视觉。
所谓的机器视觉,实际上是指借助摄影摄像设备捕捉目标零件的图像,并运用图像处理技术对捕捉到的工件图像进行数字化处理,将工件图像的各项参数转化为能够被检测仪器记录、判断的数据,通过此项技术能够大幅度提升非接触测量以及定量检验效率。通过类似于人工检测的视觉捕捉机制,判断工件是否存在毛刺,并准确判断毛刺数量以及所在位置。与传统检测方式相比,这种基于机器视觉的机器人去毛刺平台,能够形成统一的判断标准,以数据代替传统的人工经验判断,对机械零件进行筛选,并在此基础上对零件所出现的偏差值进行实时监测,对机械零件所出现的毛刺问题进行统一分析,大幅度提升机械零件去毛刺效率并降低该环节成本[2]。
2 相机与工业机器人视觉系统标定
作为机械视觉系统中的重要组成部分,相机标定系统一直以来都是设计重点。从理论层面来看,对相机系统进行标定,实质上就是确定相机成像模型外部与内部参数,通过这些参数,设计人员能够明确由相机所捕捉到的工件图像中,每一个像素点所对应的三维空间坐标,令机器人系统能够正确判断工件所在的三维空间位置,为机器人手臂所进行的去毛刺工作提供数据基础[3]。
2.1 相机成像
想要深入分析相机系统标定问题,先要对视觉系统成像原理进行深入分析。相机所捕捉到的机械工件图像为二维图像,因此需要借助相机标定,在二维坐标与三维坐标之间建立关联,使二者之间形成映射关系[4]。通过图像处理技术,对机械工件关键信息进行加工与处理,进而制定处理方案。
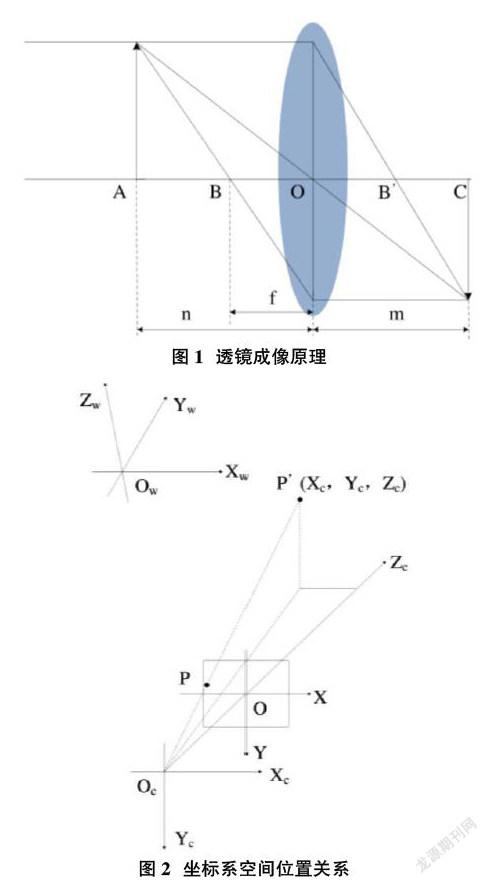
从结构方面来看,该平台所采用的视觉捕捉系统,主要由镜筒与透镜构成,利用凸透镜光学原理实现成像(如图1所示)。
设计机器人去毛刺平台的相机标定,其主要目的是采集机械零件在三维空间中的位置信息以及工件轮廓几何信息,并基于像素成像技术,对该物体进行数字化重构,确定相机捕捉到的机械工件图像在四个坐标系中的具体位置(如图2所示)。
其中,第一个坐标系为世界坐标系,即三维空间中的直角坐标系参数Ow-xwywzw,通常情况下,设计人员将世界坐标系作为参考坐标系使用,利用該参数标定机械工件在三维空间中的具体位置。第二个坐标系为相机坐标系
Oc-xcyczc,第三个坐标为图像坐标系,也就是利用镜头成像原理所捕捉到的目标图像,第四个坐标系为像素坐标系,该坐标系是虚拟坐标系。在坐标系空间位置关系中用P点表示[5]。
相机标定方式多种多样,实际工作中,需要依据现场情况以及实际需求进行灵活选择。本文中设计的基于机器视觉系统的机器人去毛刺平台,由于其位于实验室中,外界干扰因素较少,因此可以选择操作简便且能够确保较高精准度的标定法。其工作原理为利用世界坐标系、相机坐标系、图像坐标系以及像素坐标系之间的转换,将处于三维空间的机械工件映射到二维平面图像上,通过提取二维图像的像素信息,判断机械工件是否存在毛刺,以及毛刺的数量、位置。
①世界坐标系与相机坐标系之间的转变。坐标系空间位置关系中的P点,在世界坐标系与相机坐标系中的标记方式为xw=(xw,yw,zw,1)T,以及xc=(xc,yc,zc,1)T,将该矩阵旋转得到新矩阵R,再将矩阵平行移动,得到矩阵t,则能够得出关系式。
②相机坐标系与图像坐标系之间的转换。根据相机成像模型,P点在该坐标系下的表达方式为P(xc,yc,zc),且该空间点在图像坐标系中的投影为p(x,y),参数x与y的关系为:
该关系式中,f就是xcyc平面与图像坐标系平面之间的距离,即焦距。
③图像坐标系与像素坐标系之间的转换。这两个坐标系之间的参数转换关系如下:
对该关系式进行表达的过程中,为了对其进行简化,需要对矩阵进行重新表示。
④像素坐标与世界坐标系之间的转换。在得到机械工件图像的像素坐标之后,还需要对其进行世界坐标系转换,以机械手臂能够读懂的语言,确定工件的具体位置,并进行去毛操作[6]。
由此可以看出,如果排除相机出现畸变这种偶发问题,我们可以通过二维平面中的两个坐标点,实现对于相机的标定。设计人员运用Halcon软件辅助进行相机标定工作,利用该软件,在多幅标定板中提取图像特征,并根据投影的具体参数,计算相机内部、外部参数。
2.2 机器人手眼标定
本次实验中所使用的机器人手眼标定,以“Eye-to-Hand”模式为基础,布置机器人手臂以及相机具体位置(如图3所示)。
通过分析机器人手臂与相机坐标系可以发现,相机被安装在该系统外侧的固定支架上,因此可以确定{B}坐标系与{C}坐标系之间的空间位置关系始终保持不变,且{F}坐标系的位置也保持不变。因此,读取{T}坐标系的参数,可以得到旋转矩阵R以及平移矩阵t[7]。
由于该实验所采用的机器视觉系统为单目视觉系统,因此无法收集机械工件在Z坐标上的系数,只能得到工件平面坐标系数,即X坐标与Y坐标。为了解决Z坐标参数无法收集的问题,设计人员运用特殊夹具,确保在收集机械工件图像数据过程中,Z坐标轴的参数为固定值,并在数据处理系统中对Z坐标轴的数据进行初始化处理,使其数据始终为0。
在确保相机内部参数不改变的情况下,该坐标系统中的参数为常数,同时确保每一行的三个参数平方和,以及每一列参数的平方和,数值均为1。
在此基础上,在相机的正下方布置标定板,通过像素识别技术记录像素点的位置(km,kn),之后设计人员需要操控机器人手臂,按照一定顺序将手臂移动到标定板上的指定像素位置,以此来记录机器人手臂的坐标参数[8]。
该设计中,标定板上一共存在9个坐标点,机器手臂需要沿着X轴以垂直的姿态向下移动,再沿着Y轴的方向移动,通过这种方式识别出全部九个点的像素坐标。由于坐标矩阵不可逆,因此不能对矩阵进行求逆计算,而是要将该矩阵展开:
需要注意的是,由于A为3×3的矩阵,B为3×1的矩阵,因此r11,r22以及Δx这三个参数,可以通过将等式两端同时乘以A的方式得到。
在得出r11,r22,Δx这三项参数之后,还有r13,r23以及r33这三个参数没有计算。这里我们可以设α1=[r11 r21 r31]T,α2=[r12 r22 r32]T,α3=[r13 r23 r33]T,由于这三个参数之间存在正交性,因此对于标定板上的九个像素信息采集点,可以提出完整的9组数据,并运用SDP优化方法,对α1,α2,α3这三组参数进行信息采集。同时,由于受到“对称矩阵仿射组合半正定”的约束,这9组参数的线性函数曲线能够得到极值,对于α1,α2,α3这三组参数进行施密特正交计算,到此,矩阵中所有参数均已计算求得。
3 基于蚁群算法去毛刺工艺优化建模
使用工业机器人去毛刺平台进行去毛刺工作过程中,想要提升去毛刺效率需要重点关注以下两方面问题。一方面,需要对去毛刺工艺参数进行优化,提升机器人手臂灵敏性。另一方面,对于机器人手臂去毛刺的加工路径进行优化,缩短去毛刺时间间隔。
从整体上看,去毛刺工艺参数是影响此项工作效率以及成本的最主要因素。因此相关设计人员需要重点关注去毛刺工艺的参数设计问题,传统工作模式下,去毛刺工艺参数的选择具有明显的主观性,主要依靠相关工作人员的实际工作经验来设定参数[9]。造成这一现象的主要原因是去毛刺工艺参数设计工作十分复杂,很多外部因素会影响机器人手臂去毛刺工作效率以及去毛刺质量,如果依然按照传统理论去设定去毛刺工艺参数,该工作将会变得十分困难。基于这种背景设计人员需要基于先进的蚁群算法,去毛刺工艺参数进行优化。
3.1 优化变量
建立区锚式工艺优化模型过程中,相关人员需要对目标函数进行深入分析,目标函数由一组参数构成,这些参数中就包含了需要被优化的变量。由于存在大量能够影响去毛刺工艺的因素,为了精简计算过程,设计人员选择将能够对设计目标产生较大影响的参数,标记为优化变量,并使用x1,x2…xn一系列符号代表优化变量,由这些优化变量共同构成不同维度(n)的列矢量(X):
优化变量中主要包括以下工艺参数:①切削速度;
②进给速度;③切削刀具主轴转速;④每转进给量;⑤切削深度。这些优化变量之间存在紧密关联,在一定条件下可以相互转化。这其中,切削刀具主轴转速与切削速度之间存在以下关系:
该关系式中的变量d为切削刀具的直径,V代表切削速度,n代表切削刀具主轴转速。通过计算得出每转进给量、每齿轮进给量以及进给速度之间的关系式。
由此可以看出,在众多优化变量中,切削深度、每齿进给量以及切削速度这三个参数之间相互独立。基于这一特点,在排除刀具质量、操作者经验以及工件良率等不稳定因素之后,设计人员可以通过对切削深度、每齿轮进给量以及切削速度这三个可控的优化变量的优化,提升去毛刺作业效率。
3.2 确定目标函数
①最大生产率。
所谓的最大生产率,是指在规定时间内最多能够去除多少毛刺,也可以将其解读为去除单位数量的毛刺所花费的最少时间,其公式为:
该公式中的L代表毛刺长度。
这里需要注意的是,对于机械工件中较长的毛刺,机器人手臂一次走刀无法将其彻底去除,如果毛刺过大还可能损伤刀具,因此对于大型毛刺需要多次走刀。在切削毛刺的过程中,为了保护刀具以及工件的完整性,需要确保走刀的方向与毛刺旋转方向一致(如图4所示)。
如果将毛刺去除高度设为at,需要经过Np次走刀才能完全去除毛刺,则可以得出去除毛刺总加工时间公式。
②最理想加工质量。
除了加工速度之外,机械工件的加工质量也是十分重要的指标。衡量一个加工工件质量的关键性参数就是其表面的粗糙程度,工件表面的粗糙度越低,就代表其质量越优良。基于该观点,设计人员对去毛刺工艺优化模型进行分析,并得出“该模型具有很高的预测精度”这一结论。基于此,可以用该模型衡量工件表面粗糙程度[10]。
该式中,K,k1,k2,k3均为常数。
4 工业机器人去毛刺平台搭建及工作流程
为了获得更为详尽的实验数据,本次测试中采用外形较为复杂的高压铜触指工件,该工件的特点为体积较小且外形复杂,存在大量不规则曲边(如图5所示)。
由于该零件体积小巧,且外形不规则,给零件的固定与定位带来了不小的挑战,相关工作人员通过仪器去毛刺平台中安装的相机,对该工件的形状轮廓信息进行实时的图像采集。一方面,将相机固定在支架上,为了避免相机阻碍机器人手臂工作,工作人员需要对相机与工件表面之間的距离进行严格控制,确保二者之间的距离超过700mm。此外,为了能够得到该零件完整的二维图像,工作人员需要对相机视野进行调整,确保相机视野大于100mm×50mm。另一方面,工作人员需要对机器人手臂的轨迹精度进行严格把控,切削刀具沿着工件棱边移动一整圈代表走刀一次,工作人员通过图像处理软件记录边缘点集坐标以及实际加工坐标,要将两个坐标之间的误差严格控制在0.2mm之内。
工业机器去毛刺平台主要由6个部分构成。①成像设备。即固定在支架上的相机以及与相机配套使用的镜头。②光源。光源与相机组合使用,属于相机的辅助设备,确保相机拍摄出的图像清晰完整。③图像处理软件。该系统中使用Halcon软件对相机拍摄的二维图像进行处理,并将数字化数据传送给机器人手臂的控制单元,确保机器人手臂顺利完成去毛刺工作。④实验用工件及夹具。⑤外部辅助设备。⑥电源以及机器人手臂控制系统。
具体去毛刺流程为:将相机固定在支架上,同时将目标工件使用夹具固定在操作台中。运行系统,利用相机获得工件的二维图像信息。利用Halcon软件对二维图像信息进行数字化处理,并得到其像素坐标参数,通过这种方式对目标工件的外形进行识别。当系统判断该工件存在毛刺之后,利用内置的计算系统得出毛刺大小以及位置,以此为基础设定机器人手臂去除毛刺的运动轨迹以及去除次数,完成去除毛刺工作之后,利用传送装置将工件运送到指定位置,同时将下一个工件传送至工作台中,如此往复直至将全部工件的毛刺去除(如图6所示)。
5 结语
采用工业去毛刺机器人平台代替传统人工去毛刺模式,是机械零件加工工作发展趋势,不仅能够提升去毛刺的效率,而且能够大幅度缩减成本。因此相关设计人员需要对如何优化工业机器人去毛刺平台的问题给予足够重视。利用先进的图像捕捉、图像分析以及蚁群算法,将原本存在于三维空间的工件映射于二维平面,并计算得出其像素坐标参数,引导机器人手臂进行去毛刺工作,为机械加工行业的发展提供技术支持。
参考文献:
[1]王晓峰.去毛刺工艺及设备在大棒车间线的应用[J].冶金与材料,2021,41(05):103-104.
[2]王睿瑶,谭文奇,王靖超,万瑾,张劲.基于机器学习的毛刺在线检测研究[J].电子技术,2021,50(10):20-21.
[3]蔡永祯,许四祥,杨宇,方建中.基于ROS的机器人去跑偏板坯毛刺自主规划[J].太原科技大学学报,2021,42(02):123-127.
[4]赖增亮,刘冠峰.一种视觉辅助机器人离线编程去毛刺系统[J].机械设计与制造,2021(09):251-254.
[5]郭其超,金思勤,高扬,朱飞.齿轮箱金属零部件去毛刺技术研究[J].清洗世界,2021,37(07):165-166.
[6]张彦杰.复杂铝合金阀体零件毛刺的控制与去除[J].现代制造技术与装备,2021,57(07):160-161,164.
[7]姜俊,舒鑫,雍建华,魏兆成.金属切削毛刺形成与控制技术研究进展[J].工具技术,2021,55(07):3-10.
[8]姜俊.模具铜电极精密铣削毛刺的抑制技术[D].大连理工大学,2021.
[9]杨兵兵,童楠楠,郭鹏,等.接箍螺纹首扣毛刺去除方法[J].焊管,2021,44(04):58-61.
[10]周晓宇,张龙波,王雷.基于蚁群优化的直觉模糊聚类脑MR图像分割[J].计算机应用与软件,2021,38(11):226-231.
