基于转动惯量辨识与扰动补偿的永磁同步电机滑模控制
2022-01-15李江坪颜伟平郭皓源
李江坪,王 兵,颜伟平,郭皓源,李 罗
(1.湖南工业大学 电气与信息工程学院,湖南 株洲 412007;2.湖南工业大学 电传动控制与智能装备湖南省重点实验室,湖南 株洲 412007)
1 研究背景
在工程应用中,电机的运行容易受到多方面干扰的影响,例如电机的内部参数摄动和负载转矩波动都有可能影响电机的正常运行,其中转动惯量也会随着负载的变化而发生改变,而负载扰动就是调速系统最大的干扰,也是影响最大的一个因素。对于抗负载扰动要求比较高的系统而言,控制系统的抗负载扰动性能和控制精度的要求就显得尤为重要[1]。
当采用PI 调节器对永磁同步电机(permanent magnet synchronous motor,PMSM)进行控制时,控制器的调节算法相对较为简单,在一定范围内可以满足系统控制要求,但是对于一些高精度、高性能的场合,传统的PI 调节器可能因存在着一些缺陷而达不到理想的控制效果[2]。采用滑模变结构控制(sliding mode control,SMC),可以减小系统参数摄动和外界扰动对系统整体性能的影响,具有很强的鲁棒性,可以弥补PI 调节器存在的部分不足之处,但是它有一个缺点,就是存在着固有的抖振现象,当状态轨迹到达滑模面后,并不是沿着滑模面平稳地向着平衡点滑动,而是在滑模面两侧来回穿插,从而使系统产生了难以消除的抖振现象。在滑模控制方面,很多专家和学者都在不断地进行改进研究,希望能尽可能地抑制滑模的抖振现象,达到提高其控制性能的效果[3]。如文献[4]采用等价输入干扰估计算法,对干扰起估计和抑制作用,并且引入了电流前馈,以减小电流脉动,对系统的响应速度和抗扰性能有很大的优化效果,但是没有考虑因负载改变引起的转动惯量发生变化,因而会对控制系统观测值产生影响。文献[5-6]为了解决负载转动惯量在辨识过程中出现的精度不够等问题,设计了一种通过抑制内干扰力矩控制策略的干扰观测器,从而使电机的转速更加稳定,输出力矩响应也更为快速。文献[7]提出了一种模型参考自适应(model reference adaptation system,MRAS)控制方法和滑模变结构理论相结合的负载观测器,仿真实验结果表明该观测器能实时跟踪且准确地检测出负载转矩的变化情况,从而提高了调速系统的整体性能,但是调节时间较长,不适用于快速调节的控制系统研究。文献[8]提出了一种将电机转速和负载转矩同时作为观测对象的滑模观测器,并将观测的负载转矩进行前馈补偿的方法,实验结果表明该方法对系统抖振现象和抗扰性能都有较好的改善效果。文献[9]设计了一种改进滑模观测器的PMSM矢量控制方法,用于解决传统滑模观测器在PMSM 转子位置和转速观测时存在的抖振问题,但是在转速环的设计中,滑模参数的选取较为困难,不易调节。文献[10-11]将大多数学者默认为固定不变的电机整体转动惯量进行快速、准确地在线跟踪辨识,对控制算法中的转动惯量实时更新,可以有效地提高系统的抗干扰性能,但只是针对于突击负载的分析,对于大惯性负载来说,电机运行是一个连续变化的量,对电机的影响需要进行更深入地研究。
基于上述分析,本文提出一种输入干扰补偿的方法来对电机的内部参数摄动和外部负载干扰进行扰动抑制的控制策略,并结合MRAS 控制方法,设计了一种转动惯量在线辨识扰动补偿观测器,实时将辨识出的转动惯量反馈至观测器中,即将转矩辨识的结果转换为观测电流,与给定转速经滑模控制输出电流做差后,输入控制端,对控制系统进行输入干扰补偿的方式,以减小电流脉动,使电机达到稳定运行的效果。在环实物仿真平台验证结果表明,本研究所提出的控制策略对系统抗扰性能和响应速度都取得了很好的改善效果。
2 PMSM 的数学模型
为了方便研究设计,采用id=0 的控制方法作为转子磁场定向控制,则PMSM 在旋转坐标系下的电压方程如下:
式中:ud、uq、id、iq、Ld、Lq分别为电机在直轴和交轴的电压分量、电流分量以及电感;
Rs为定子电阻;
ωe为电角速度;
ψf为永磁体磁链。
对于采用id=0 控制的永磁同步电机控制系统,若Ld=Lq,则不存在磁阻转矩,此时,转矩方程为

电机的运动方程为

式(2)(3)中:Te为电磁转矩;
p为极对数;
TL为负载转矩;
J为转动惯量;
Br为电机的黏滞摩擦系数;
ωm为机械角速度。
3 滑模速度控制器
在滑模变结构控制系统中,滑模控制的设计主要包含了3 个要素,分别是切换函数s、趋近律和控制率i*q[12]。
3.1 滑模控制器设计
定义PMSM 系统的状态变量如下:

式中:ω*为给定转速值;
ω为实际转速值。

为使系统更快达到稳态,定义切换函数为

式中c为滑模面参数,满足李普希兹条件,且c>0。

为提高滑模趋近运动中的动态性能,消除滑模控制系统的抖振现象,引用了高为炳院士提出的指数趋近律概念设计控制器[13],其表达式为

式中:k1、k2均为调节参数;
-k1sgn(s)为等速趋近项;
-k2s为指数趋近项。
由式(8)可知,通过调节参数k1和k2,不仅可以解决滑模运动趋近过程的运动性能,还可以有效地削弱系统抖振现象。
为加快控制系统的调节时间,使系统在受到干扰的情况下能快速恢复到稳定状态,引用文献[14]中的指数趋近律方法,并改进为

在指数趋近律的指数项中,加入了转速误差平方x12,使参数k2与系统状态变量相结合,形成变指数趋近律。当系统状态变量的运动轨迹远离滑模面时,此时指数项中x12的值逐渐增大,状态变量将以等速-k1sgn(s)和变指数-k2x12s两种速度趋近滑模面;当系统状态变量运动轨迹靠近滑模面时,指数项中x12的值近似为0,指数项的值也趋近为0。通过这种方式趋近时,等速项参数应尽可能地取小,这样可以减小因趋近滑模面的速度过大而引起系统抖振的现象,使控制器的调节更加稳定。
联立式(7)和式(9),可得:

由式(10)可得,基于改进指数趋近律的滑模转速控制器的设计,定子电流分量iq的给定值为

3.2 稳定性分析
为了证明系统可以由任意初始状态下在有限时间内收敛,即能保证运动轨迹可以到达滑模面,选取李雅普诺夫函数为

由式(9)和式(12)可以得到

而k1>0、k2>0、s·sgn(s)≥0、x21≥0,因此可以得到,即设计的控制系统可以达到稳定。
4 负载扰动补偿观测器
为了提高系统的抗负载性能和增强系统的稳定性,本研究采用一种扰动补偿观测器,对负载转矩进行同步估算,然后通过前馈补偿的方式,对系统进行扰动补偿,以减小控制电流的脉动,从而实现对系统稳定性能的提升和对系统动态性能的改善。设系统的状态方程如下:

式中:x为系统状态变量;
u为输入控制量;
f为负载扰动量;
A、B、D均为常系数矩阵。
则负载扰动误差可表示为

e为扰动量的观测误差。
若在一个采样周期内,不考虑负载扰动量f的变化,即,通过扰动补偿观测器进行推算,构建如下观测器表达式:

式中:k3为扰动补偿观测器的增益系数。
将式(16)代入式(14),可得:


在控制系统中,由于系统的采样周期速率很快,对于负载而言,在一个采样周期内,负载转矩的变化是可忽略不计的,因此一个变化周期的负载转矩可作为恒定值来进行分析,即,将电机机械转速和负载转矩作为状态变量,则式(3)可改写成如下形式:

扰动补偿转矩观测器的结构如图1所示。

图1 扰动补偿转矩观测器结构图Fig.1 Structure diagram of disturbance compensation torque observer
由于负载转矩估算结果不能直接与转速形成闭环反馈,故将观测的负载转矩转换为补偿电流作为负载扰动补偿输入控制调节器中。设补偿电流为,结合式(11),可得到控制端给定电流为

式中,kt为转矩观测补偿系数,且kt>0。
由式(2)中电磁转矩与电流之间的关系,可得出kt应取2/(3pψf)。
5 转动惯量辨识
因系统转动惯量会随着负载的扰动变化而发生相应改变,可见,转动惯量对系统的控制具有很大的影响,要使得系统的抗干扰性能提高、鲁棒性加强,就不能忽略负载对系统转动惯量的影响。本文采用MRAS 的辨识方法在线辨识系统转动惯量,MRAS结构图见图2。

图2 MRAS 结构图Fig.2 MRAS structure diagram
如图2所示,MRAS 由3 部分组成,包括可调模型、参考模型和辨识算法。将含转速的模型视作可调模型,用ωg表示,它表示实际的物理系统;将不含转速的模型视作参考模型,用ωm表示,它表示理论的数学模型系统。将可调模型和参考模型做差,得到速度观测误差值ε,ε作为辨识算法的输入参数,形成一个自适应算法实时调节,实现对系统整体J的实时跟踪辨识。
设Ts为系统采样周期,将PMSM 运动方程进行离散化处理,黏滞摩擦转矩此时忽略不计,则t-1 时刻的离散化方程为

同理,t-2 时刻的离散化方程为

系统的采样频率远大于负载的变化速率,在一个采样周期内,负载转矩TL的变化可以忽略不计,默认为保持不变,即TL(t-1)=TL(t-2),联立式(22)和(23),可得出MRAS 的参考模型为

式中:b(t)=Ts/J;
ΔTe(t-1)=Te(t-1)-Te(t-2)。
同理,MRAS 的可调模型表达式为

式中:ωg(t)为t时刻实际电机转速的观测值;
ωm(t)为t时刻实际电机转速的实际值;
bg(t-1)为辨识算法的输出量。
引用Popov 超稳定理论设计辨识算法,推导出转动惯量的自适应辨识算法表达式,为

式中:ε(t)为速度观测误差,且ε(t)=ωm(t)-ωg(t);
β为自适应的增益参数。
在得到bg(t)后,可通过J*=Ts/bg(t)计算得出转动惯量观测值J*。
6 在环实物仿真平台验证
为了验证上述方法的可行性,通过Matlab 搭建仿真模型,并借助MS320F28335 型DSP 为核心的模型在环实物验证平台进行验证。
在环实物仿真平台所选用的PMSM 的具体参数如表1所示。
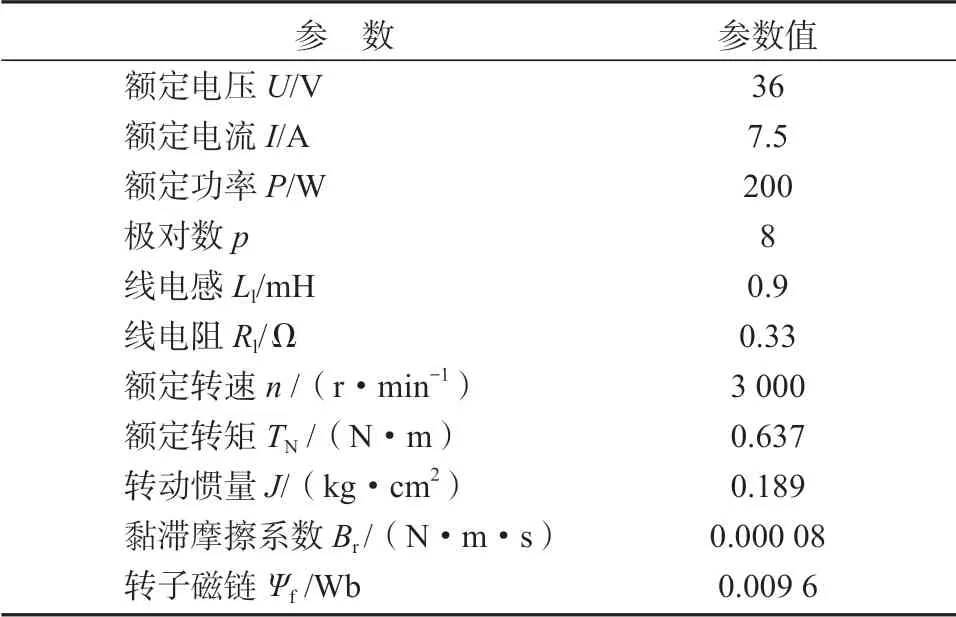
表1 选用PMSM 的参数及取值Table 1 PMSM parameters with their values
在环实物仿真平台中,实物电机带的编码器为增量式编码器ABZ+uvw,2 500 PPR,每次上电时无法知道自己的绝对位置,采用在程序前2 s,先给定3π/2 的电角度,以消除初始电角度偏差。在环实物仿真平台以及仿真模型分别如图3和图4所示,控制系统原理框图如图5所示。

图3 在环实物仿真实验平台Fig.3 In-the-loop physical simulation experiment platform

图4 在环实物仿真模型Fig.4 In-the-loop physical simulation model

图5 控制系统原理框图Fig.5 Block diagram of the control system
6.1 转动惯量辨识验证
通过仿真验证可以得知,辨识算法能很好地辨识出系统整体的转动惯量值,负载的扰动也会引起转动惯量发生改变。同时,当取不同的自适应增益系数时,转动惯量辨识的调节过程也会有不同的变化。即在给定转速为1 200 r/min 的情况下,空载启动,分别取不同的β值,即β=0.1,0.5,1.0,2.0,对电机进行转动惯量辨识,观察在受到干扰的情况下对转动惯量辨识的影响,所得结果如图6所示。

图6 不同增益系数时转动惯量辨识波形Fig.6 Moment of inertia identification waveform under different gain coefficients
分析图6所示不同增益系数时转动惯量的波形变化情况可以得出:随着自适应增益系数取值的增大,转动惯量辨识响应速度加快,不过与此同时辨识出的结果会有较大的波动。
6.2 负载转矩测量值与观测值对比分析
图7所示为仿真所得扭矩传感器的转矩检测值变化曲线,图8所示为仿真所得扰动补偿观测器的观测值变化曲线。

图7 扭矩传感器的转矩检测值变化曲线Fig.7 The curve of torque detection value of the torque sensor

图8 扰动补偿观测器的观测值变化曲线Fig.8 Curves of observed values of the disturbance compensation observer
电机上电稳定后,空载启动,从扭矩传感器的转矩检测值变化曲线中(见图7)可以看出,当电机空载运行时,扭矩传感器测量出的转矩为0.11 N·m;当给定的负载转矩为0.22 N·m,扭矩传感器在10 s 时测量所得的转矩为0.33 N·m。
由图8可以得知,观测器观测到的转矩值也为0.33 N·m,说明扰动补偿观测器对负载转矩的变化具有实时的跟踪补偿能力。
在实验过程中,将观测器的观测值与实际的扭矩传感器测量值经过多次试验对比与分析发现,在转速恒定的情况下,扰动观测器的增益系数k3对观测效果有很大的影响。增益系数k3值越小,系统响应速度越快,观测值的跳动幅度越大;而k3值越大,系统响应速度越慢,观测值的跳动幅度越小。因此,k3应折中选取一个相对合适的值。
6.3 负载力矩突变分析
电机采用空载启动,在转速恒定的情况下,连续改变电机的负载力矩。即电机上电稳定后,给电机设定1 200 r/min 的恒定转速;运行至10 s 时,突加大小为0.22 N·m 的负载力矩;运行至14 s 时,突加大小为-0.22 N·m 的反向负载力矩。图9所示为力矩突变情况下,加负载扰动补偿后与未加负载扰动补偿时的电机转速对比仿真结果。
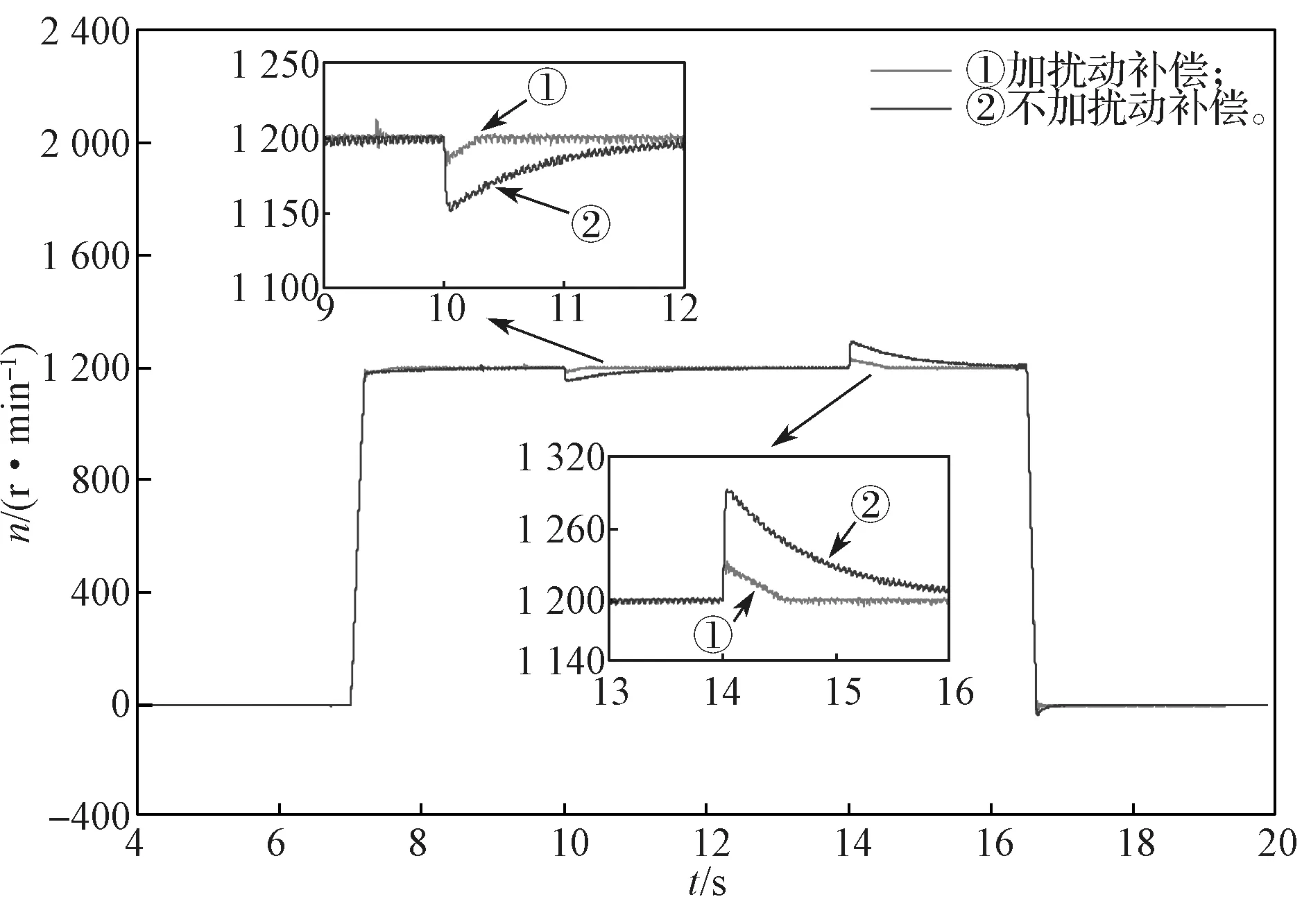
图9 两种控制策略下力矩突变时的转速对比曲线Fig.9 Comparison of torque mutation speed under two control strategies
从图9中可以看出,在不加扰动补偿的控制系统中,当负载发生突变时,电机转速有50~90 r/min 的跌落和上升现象,需要2 s 左右即恢复到给定的转速;在加扰动补偿的控制系统中,当电机转速跌落和上升减小到20~30 r/min 时,仅需要0.5 s 左右便可恢复到给定转速。由此可见,经过负载扰动补偿后的调节时间明显缩短,并且能快速恢复到给定转速,比未加扰动补偿的控制响应更快,具有较好的抗干扰能力和响应速度。
6.4 电机转速突变分析
在没有外界干扰的情况下,给电机加载恒定的负载力矩,但连续改变电机的转速。即当电机上电稳定后,将电机转速设定为1 200 r/min,在10 s 时,转速从1 200 r/min 升到1 500 r/min,运行至14 s 时,再将转速从1 500 r/min 突降至1 300 r/min,所得的实物对比仿真结果如图10 所示。
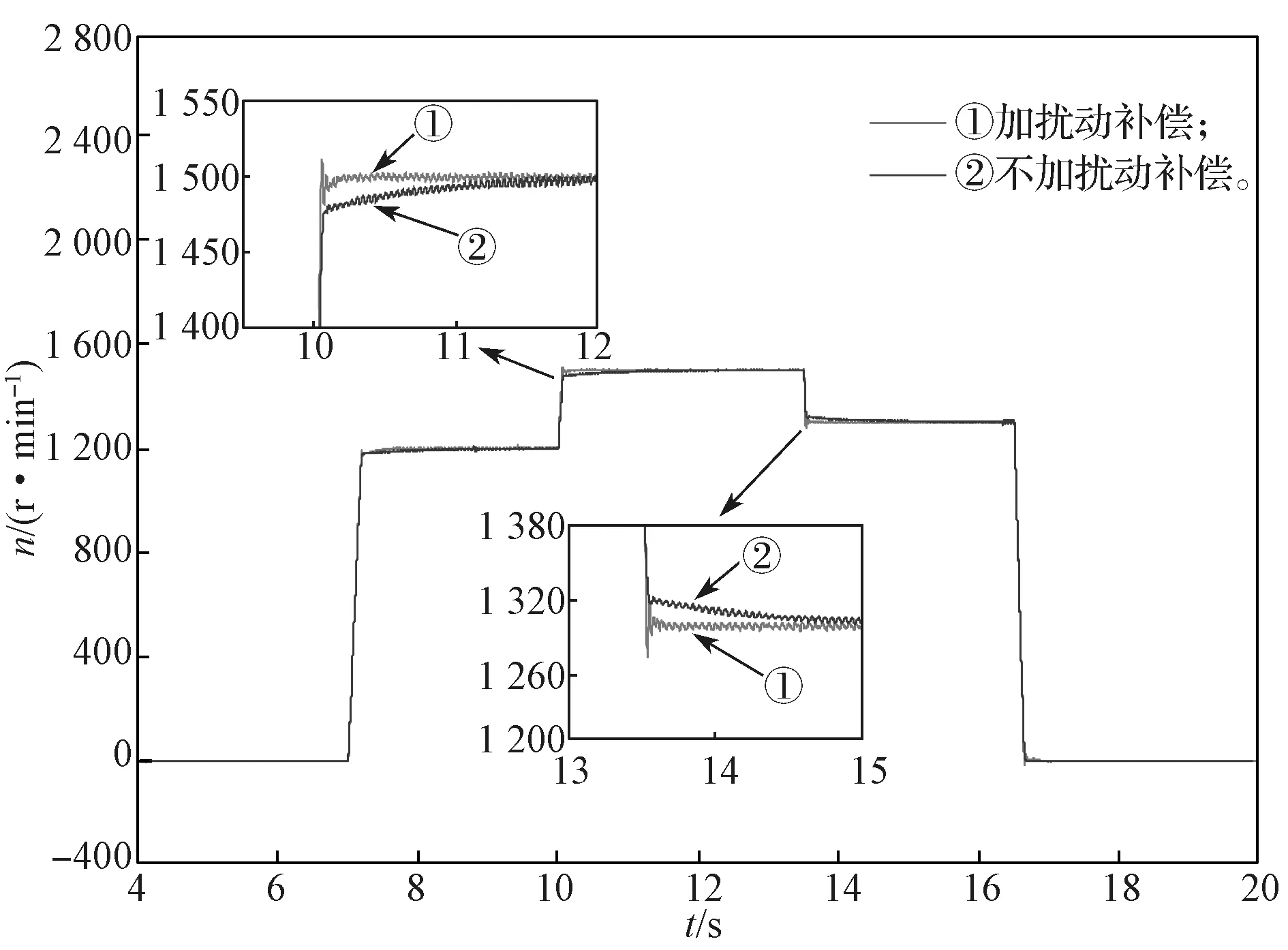
图10 两种控制策略下转速突变响应的实物对比仿真结果Fig.10 Comparison of actual speed change response under two control strategies
从图10 所示仿真实验结果图中可以看出,未加扰动补偿时,系统的响应速度较慢,大概需要1.5 s才能稳定到给定的转速;而当加入扰动补偿后,系统的响应速度明显加快,调节时间缩短,但是会有较小的超调量。
7 结语
本研究设计了一种转动惯量在线辨识扰动补偿观测器,将辨识出的转动惯量实时反馈至观测器中,采用一种输入干扰补偿的方法,将观测的负载转矩变化值转换为转矩电流,补偿至控制系统中,以减小转矩电流脉动,提高系统的稳定性能。在环实物验证仿真结果表明,所设计的转动惯量在线辨识扰动补偿观测器能很好地对负载转矩进行观测,引入输入干扰补偿后的系统响应速度更快,抗干扰性能更强,具有较好的鲁棒性。
