多层水培叶菜自动化物流装置的设计与试验
2022-01-10薛坤鹏蒋先平吴玉发申婷婷
薛坤鹏,王 岩,蒋先平,吴玉发,侯 露,申婷婷
(1.广东省现代农业装备研究所,广东 广州 510630;2. 广东弘科农业机械研究开发有限公司,广东 广州 510555)
0 引言
设施管道式水培叶菜具有节水、节肥、省药、生长周期短、产品质量高等优势,可解决传统土培所致设施环境生态恶化等问题。国外发达国家叶菜无土栽培技术成熟,应用范围和栽培面积大,经营与技术管理水平高,已实现了集约化、自动化生产。在欧洲,水培叶菜作业从播种、育苗、移植、运送到培育、收获、包装等多个环节都实现了高度的自动化,大量先进设备及技术应用于水培叶菜无土栽培,形成蔬菜生产工厂。图1 至图3 为荷兰VISCON 公司的叶菜种苗移植设备、叶菜自动运送设备和叶菜切根处理设备。

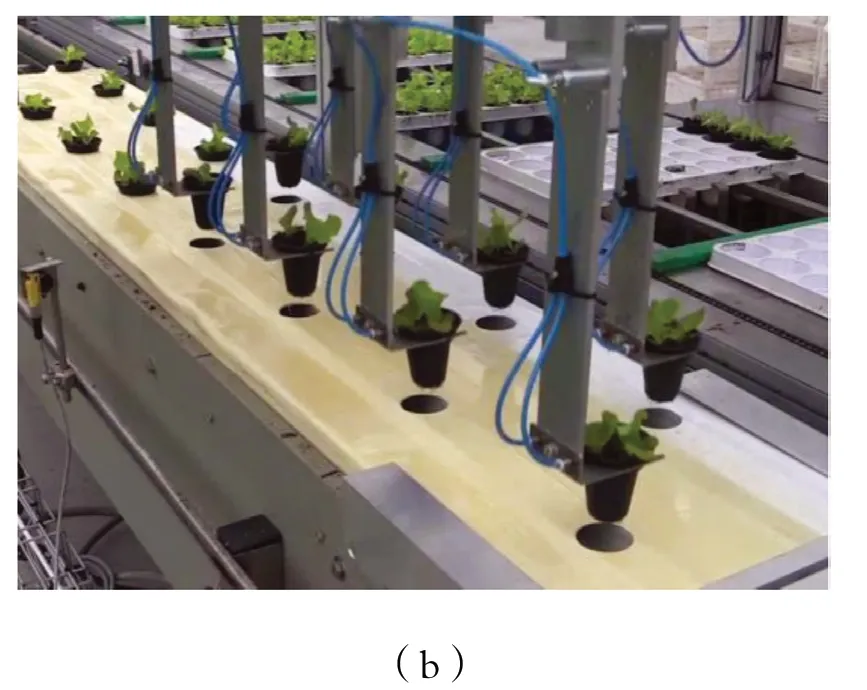
图1 种苗移植设备

图2 自动运送设备

图3 叶菜切根处理设备
我国开展水培叶菜无土栽培的应用推广比较晚,水培叶菜大规模生产基本处于全人工模式,如图4 所示,极少数企业在政府的大力扶持下配套的水培叶菜自动化物流装备大部分为整套引进的国外技术与装备,投入成本巨大,设备管理维护困难。目前,国内水培叶菜的自动化物流装备多处于研发试验阶段,功能尚不完善。广东省现代农业装备研究所研发的设施水培叶菜自动物流装备可实现水培叶菜种植管的横向和纵向传送、种植管内外表面清洗消毒等功能,如图5 所示,该设备与叶菜移苗机、收菜机配合使用可实现管道水培叶菜从定植到采收的一整套种植管理服务,极大提高了设施叶菜种植的机械化水平。由于该套装备种植管间距为固定值,且需一列空管用于清洗、消毒、周转,因此空间利用率较低。为提高设施水培叶菜自动化物流装备空间利用率,对种植管变间距传送和多层传送技术进行研究具有重要意义和实用价值。

图4 国内水培叶菜固定管培模式
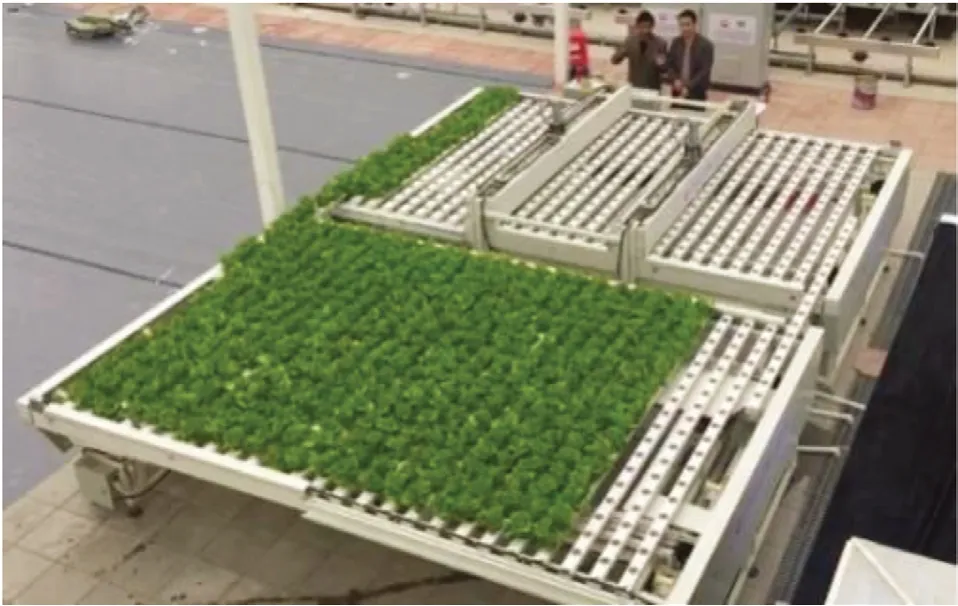
图5 水培叶菜自动化物流装备样机
1 整体结构设计
多层水培叶菜自动化物流装置由种植管水平横向推送机构和垂直升降运送机构组成。种植管水平横向推送机构分为定间距传动机构和变间距传动机构两种,可使种植管从一层进菜端依次向前移动到该层出菜端;垂直升降运送机构实现种植管从种植架的某一层出菜端取出种植垂直运送到另一层。
装置层数、规格可根据实际需要和占地空间进行设置,本文考虑基本功能需求和实验室室内高度限制,以四层为例进行设计,如图6 所示。最底层为第一层,层高200 mm,种植管间距为90 mm,种植管可通过该列定间距推送机构把收菜后的种植管经过清洗、消毒、整理后轮换送到左端进菜端备用。左端垂直升降运送机构从第一层取出空管进行叶菜幼苗移栽定植,然后垂直向上运送到第二层,第二层层高300 mm,可用于叶菜小苗、中苗的种植,刚移植的小苗种植管间距为90 mm,随着小苗的生长,该层的水平横向推送机构把长成中苗的种植管向右推送,使种植管间距变为120 mm。右端的垂直升降运送机构把位于第二层端头的种植管取出向上运送至第三层,第三层层高400 mm,可用于叶菜中苗和大苗的种植,同样随着叶菜的生长,种植管被水平横向推送机构向左逐渐推移,种植间距也从120 mm 变到150 mm。左端的垂直升降机构把第三层的叶菜输送至第四层,该层层高500 mm,随着叶菜的逐渐长大成熟,种植管间距可从150mm增大到180mm,右侧的垂直升降机构取出种有成熟的水培叶菜种植管下移到收菜位置,收获成熟的叶菜后再次对管进行清洗、消毒,放至第一层进行轮换备用。
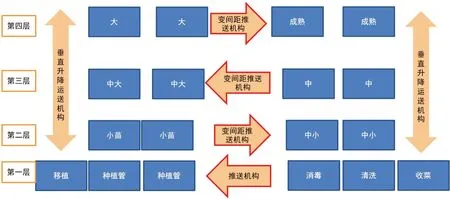
图6 多层水培叶菜装置流程布置图
2 关键结构设计
多层水培叶菜自动化物流装置主要包含种植管垂直运送机构和水培叶菜种植管变间距的水平横向输送机构2 部分。
水培叶菜种植管垂直运送机构位于多层水培叶菜装置的两端,采用步进电机驱动,由1 根传动轴带动2 个同步带滑台,2 个同步带滑台共同固定1 根铝材横向,横梁上装有2 个滑台气缸,气缸上固定电动托举滚轮。电动托举滚轮即可以托住种植管进行垂直方向输送,也可以实现种植管在多个立体物流装备间运送。如图7 和图8 所示。

图7 垂直运送机构同步带滑台和托举滚轮

图8 垂直运送机构驱动电机
为提高种植管的传送强度、刚性、稳定性并使之可以进行变间距输送,需要对水培叶菜种植管的截面进行优化设计,如图9 所示。水培叶菜种植管变间距横向输送机构位于种植管下方,由气缸带动最末端的铝材传动杆进行往复运动,不同间距的种植管之间的铝材传动杆通过变间距滑块连接,该变间距滑块由2 个可套在一起滑动的方管组成,前半部分滑块为长孔,被套在后半部分滑块内部,后半部分滑块为圆孔,通过穿过圆孔的销轴与前半部分滑块的长孔连接,如图10 所示。长孔的圆心距长度为30 mm,当与前半部分变间距滑块的传动杆移动距离为L时,因后半部分滑块的销轴可在长孔中滑动有30 mm 的空行程,因此与后半部门变间距滑块连接的传动杆移动行程为30 mm,由此可实现水培叶菜种植管变间距传送。尼龙推块通过1 个销轴和U 型铝座固定在铝管传动杆上,该尼龙推块重心位于推块的后方,且可以销轴为圆心进行转动,当尼龙推块向前运动时,前段翘起的端头可推动种植管向前移动,当尼龙推块向后运动时,前段翘起的端头被种植管的重力压下,滑到后1 个种植的底部后因尼龙推块重心在后部可再次翘起来,如此往复推动种植管向前移动。
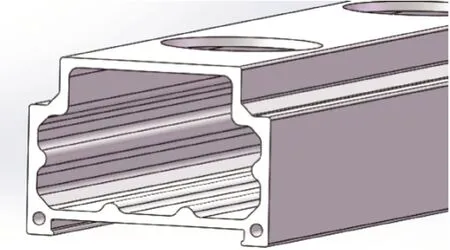
图9 新种植管横截面
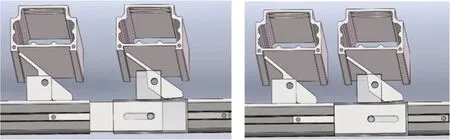
图10 种植管变间距滑块展开和收缩间距示意图
气缸推动传动杆把第一层种植管推动至第一层端头的待作业位置,该端垂直运送机构的托举滚轮电机运动到第一层的作业位置时,滑台气缸作业把该位置的种植管取出,然后步进电机驱动同步带滑台把带有种植管的滑台气缸和托举滚轮运送到指定层,滑台气缸伸出把该种植管放置在该作业层。该作业层的变间距横向推送机构把种植管向前推送,当有种植管推送到移出的待作业位置需要移出换层作业时,该端的垂直输送机构把该种植管取出后再运送到指定种植层;待叶菜成熟后,垂直传送机构把该种植管传送回第一层进行叶菜收获,清洗整理种植管后,再放置回第一层,如此循环作业。多层水培叶菜自动化物流装置整体设计模型如图11 所示。
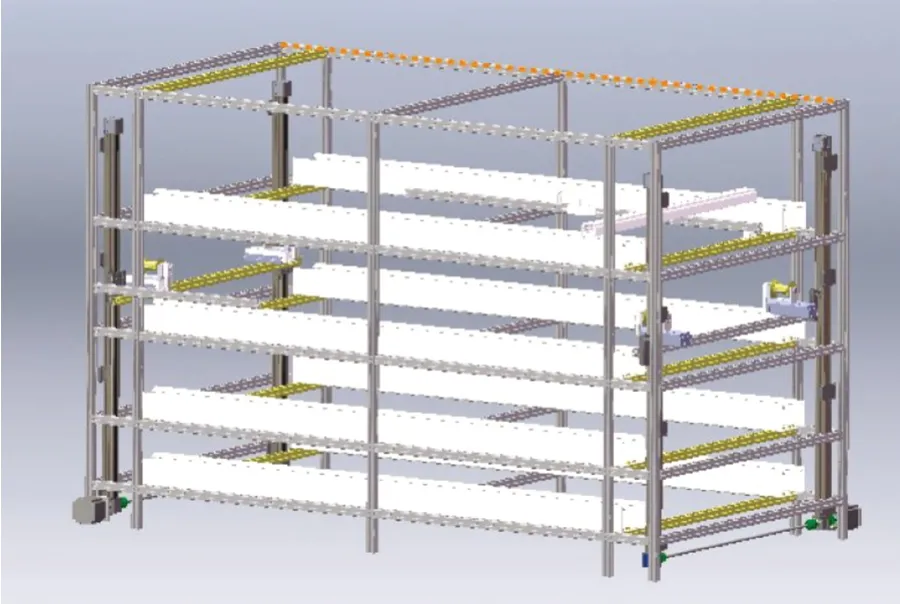
图11 多层水培叶菜自动化物流装置模型图
3 电气设计及软件程序开发
多层水培叶菜自动化物流装置的电气控制系统主要由PLC、触摸屏、控制旋钮开关、步进电机驱动器、接触器、继电器、电磁阀以及位置传感器等元器件组成。采用梯形图语言对PLC 进行输入检测与输出控制的程序软件设计。通过触控屏进行人机交互,对作业参数进行设置,人机交互界面如图12所示,利用激光传感器和霍尔传感器对种植位置、垂直升降机构的位置和气缸工作状态进行监测,从而使装置按照设计的功能流程执行作业命令,装置的作业顺序如图13。
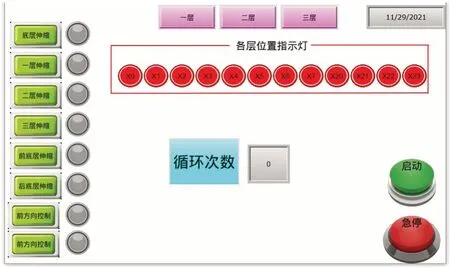
图12 触摸屏人机交互界面
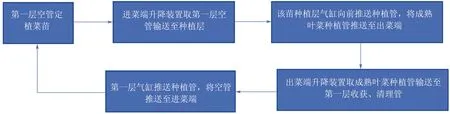
图13 装置作业顺序图
多层水培叶菜自动化物流装置的垂直升降机构由步进电机驱动,利用PLC 控制器发送脉冲和方向信号至步进电机驱动器控制步进电机的正反转,从而可使垂直升降机构进行升降动作。步进电机的优点是距离控制精准,速度调节方便,控制程序简易,极大简化了本机构的控制程序。程序设计思路如下:多层水培叶菜自动化物流装置两端底部的光电传感器首先检测垂直升降机构是否复位,启动前,通过触摸屏选好需要操作的对象层,以从第一层取管放置第二层为例,按下启动键,左端托举滚轮下的滑台气缸以及第一层的水平横向推送机构气缸伸出,然后步进电机动作,左端垂直升降机构升起固定距离,将种植管托起,短暂延时后气缸全部缩回,左端垂直升降机构带动种植管到达第二层后触发对应位置的光电传感器,步进电机停止动作,滑台气缸伸出触发霍尔传感器,将种植管放置到第二层设定位置后垂直升降机构下降,滑台气缸缩回,第二层种植层气缸伸出,同时右端垂直升降机构上升至第二层触发光电位置传感器后滑台气缸伸出,将种植管托起固定距离后滑台气缸缩回,种植层气缸缩回,右端垂直升降机构再带动种植管进行后续动作。其动作流程如图14所示。

图14 试验装置程序流程图
4 样机试验优化
根据设计模型,利用40×40 工型铝材组装试验机架,样机分四层搭建,如图15 和图16 所示。利用样机,对种植管的横向和垂直输送机构的可靠性、稳定性,以及种植管间距设置、层高设置等参数进行了试验测试。样机主要参数见表1。

表1 样机主要参数

图15 装置试验整机

图16 试验装置电气控制箱
通过试验,对种植管的截面进行了改进,增加了种植管推送位置的凸起以防尼龙推块推动过程发生滑脱现象,如图17 所示。改进后种植管被尼龙推块推动成功率从80%提高到100%,提高了种植管横向推送的可靠性。
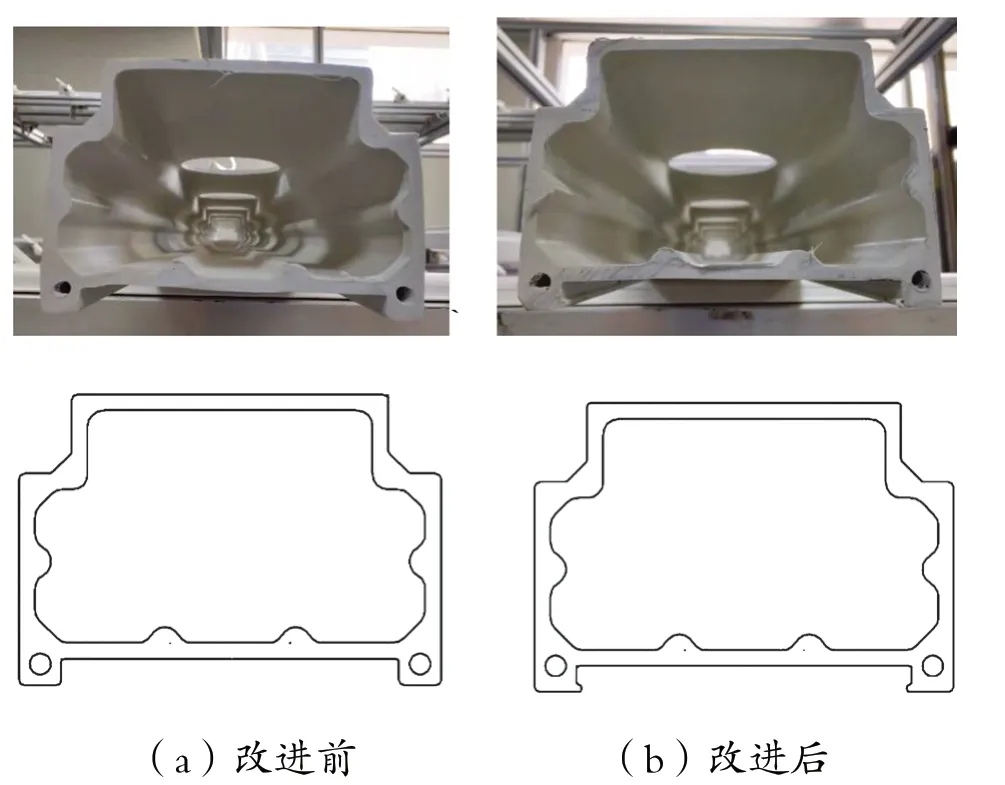
图17 种植管改进前与改进后
试验发现推块的移动距离应略大于种植管移动的距离,才能保证尼龙推块能够完全退到种植管底部,所以第一层水平横向推送机构的气缸选择了100 mm 行程的气缸。以此类推,第二层到第四层选用的气缸行程分别为130、160、190 mm。该种植管的变间距横向推送机构可实现种植管间距从90、120、150、180 mm 变化,满足叶菜不同生理阶段的种植需求。种植管各层之间利用雷赛86 型步进电机驱动带动同步带滑台模组,可完成垂直方向层与层之间的传送,达到了既定的设计要求。
5 结语
本文研发的水培叶菜变间距多层立体自动化物流装备的关键节点装置,可减少设施温室作业人工劳动力强度及成本,提高水培叶菜栽培工作效率及种植效率,加速水培叶菜关键环节自动化技术及装备的产业化进程,为现有水培叶菜设施物流装备和植物工厂立体栽培提供重要技术支持。
