无人机智能气囊设计
2022-01-07李沁程张熙苏子钦许浩
李沁程,张熙,苏子钦,许浩
(中国民用航空飞行学院 航空工程学院,四川 广汉 618307)
0 引言
随着无人机技术的快速发展,无人机已广泛运用于生活的各种场合,然而通过对无人机的调查研究后[1]发现无人机在地形复杂的区域飞行或者水面飞行时,由于无法准确知悉无人机的飞行状况再加之复杂的环境经常会导致无人机的坠毁。在无人机坠毁之后人们很难找到机体残骸,难以实现回收利用。因为在陌生的领域仅凭借无人机最终坠毁的地理信息去寻找十分不便利,尤其当无人机掉落到水里,寻找将变得更为困难。经调查,低空无人机是目前市面上较常用的无人机种类,故选用低空无人机作为智能气囊系统的试验机。低空无人机的正常巡航高度在100m~1000m之间,无人机的最低安全飞行高度为1.2m,低于1.2m时无人机将自动由巡航模式转变为降落模式。这使得无人机在近水面飞行时极易转变为降落模式沉入水底。所以本项目计划设计出一款适合无人机使用的救生气囊及报警通信系统,在发生意外情况时能及时反馈给操作者信号,以便于在无人机发生坠毁前能够及时弹出气囊,若无人机沉入水底也可利用救生气囊使无人机浮出水面,同时反馈声光报警,配合反光材料的使用使无人机更容易被发现,降低搜寻难度。
无人机的救生气囊设计由内部的控制芯片作为核心,采用传感器对无人机飞行状态进行实时监测并将采集到的信号传输给主控制器来决定是否进行释放气囊操作。救生气囊的设计制造成本相对低廉,可在日常生活中得到广泛推广应用,减少由于坠机产生的损失。
1 系统整体功能设计
由于适用于无人机的救生气囊需满足体积小、承载能力足够以及充气快速等问题,以确保气囊系统不会对无人机的飞行安全性造成影响,在满足便捷性、安全性的同时不影响无人机的飞行平稳性且能在紧急状态下快速释放气囊。无人机的智能救生气囊设计在加装气囊的同时需满足报警和通信功能,可以使无人机在执行特定任务时更加安全。例如,在进行近水面飞行时,由于无人机有自动测距功能在距离水面过近的地方会自动切换到着陆模式,而操作员无法在很短的时间内去改变无人机的飞行状态,这就造成了无人机的坠毁,此时只能通过无人机提供的落水位置信息来搜寻无人机,这大大增加了搜寻难度。如果无人机上装配有救生气囊及报警通信系统,在发生紧急情况时无人机的搜寻难度会显著下降,同时也降低了后续的维修费用。
无人机救生气囊系统与操作者之间的通讯是本系统的核心部分,需要满足快速通讯且通讯距离长等特点,本系统采用NB-IOT模块实现操作者对救生气囊系统的远程控制,可实现信息的采集传输并发送释放指令等功能。
当测距模块检测到无人机当前飞行状态距离地面过低时,通过NB-IOT模块的网络传输功能将信号发送到操作者手机,操作者可发送信号到无人机气囊系统控制气囊是否释放,从而起到对无人机的保护功能。
当无人机遇到紧急状况坠入水底时,释放的救生气囊可将无人机拖出水面,并且气囊需要在极短时间内完成充气,从而对无人机起到保护作用。
2 硬件设计
救生气囊的硬件总体设计框图如图1所示。系统硬件结构主要包括STM32F103C8T6单片机控制模块、晶振电路模块、电源与复位电路模块、NB-IOT通讯模块以及紧急报警模块[2]。

图1 系统总体设计框图
2.1 单片机控制模块
采用的STM32F103C8T6芯片是一款基于ARM Cortex-M内核STM32系列的32位微控制处理器,程序存储器容量位64KB,工作电压为2V-3.6V,可满足本系统设计的控制要求,并且价格低廉,设计简便[3-4]。可通过该微处理器实现测距、收发信号、释放气囊等功能,它是整个系统的核心组成部分。在设计中,紧急报警模块是否启动就是通过改变单片机的输出电压来实现的。单片机设计电路原理图如图2所示。

图2 单片机设计电路原理图
2.2 晶振电路模块
气囊系统所采用的外界晶振电路可为单片机提供稳定的时钟脉冲,不易受到外界干扰。设置系统所要求的时钟频率,对于整个系统来说起着事关重要的作用。救生气囊系统每一项功能的实现都离不开晶振电路提供的时钟节拍,晶振提供的时钟频率越高,单片机的运行速度也就越块。
在本系统中晶振电路采用STM32单片机内嵌有8MHz振荡器,晶振电路也采用外接8MHz晶振,采用皮尔斯振荡器配置,用于机械式谐振器件,可良好适配气囊系统的要求。
2.3 电源与复位电路模块
通过选用锂电池实现对系统的整体供电,系统供电电路如图3所示,锂电池具有电压稳定、低能放电、防爆设计以及循环充电等优点。锂电池可提供稳定的供电,采用低自放电技术减少电量自然流失,内置智能IC芯片可做到安全防爆。

图3 供电电路
复位电路可实现系统的复位归零,按下按钮时系统可由任意状态转变为初始状态,即NB-IOT模块重新开始接收单片机信号,开始新指令的收发。复位电路采用3.3V电压供电,利用电容电压不能突变的原理,使得系统上电时提供的复位脉冲不断给电容供电,实现系统的自动初始化。同时也可通过按键提供一个反向电平实现系统手动复位。
2.4 NB-IOT通讯模块
NB-IOT是窄带物联网的缩写,适用于多种场合,可结合GMS网络、UMTS网络或LTE网络实现通讯传递等功能。本系统中主要利用NB-IOT结合GMS网络实现系统的原距离通讯,其优势在于工作能耗低、待机时间长、网络覆盖范围广、低成本且可实现高效连接。
本系统所采用的NB-IOT型号为WH-NB75-BA,采用插针式封装,自带SIM卡槽,便于嵌入开发;与GPRS、4G模块硬件封装兼容,减少更换成本;支持6路指令传输以及CoAP通讯模式[5];可实现自定义编程,传输速度快,发送数据时会不断检测相邻2个字节的间隔时间,时间阈值设置为100ms,若时间间隔大于等于时间阈值时则认为一帧结束。NB-IOT通讯模块电路如图4所示。

图4 NB-IOT 通讯模块电路
2.5 紧急报警模块
在紧急报警模块中主要包括气囊释放以及声光报警。当无人机处于紧急情况下,操作者可通过通讯模块传输回的信息及时判断是否需要释放气囊,若释放气囊信号发出,此时单片机的39号端口输出高电平,电磁推杆装置启动,利用电磁铁中动铁芯与静铁芯的吸合实现推杆直线运动,将安全气囊的开关吸出,实现气囊的快速释放。气囊释放模块控制电路如图5所示。
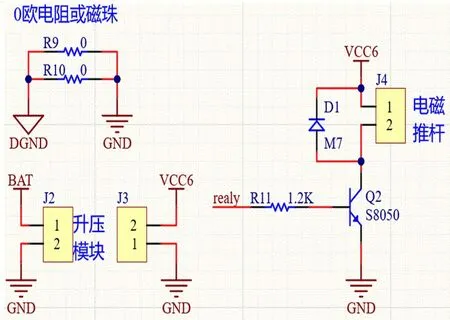
图5 气囊释放控制电路
当救生气囊成功释放之后,声光报警电路自动开始工作。单片机的38号端口连接的声光报警装置,由电阻、三极管、电容、LED管以及蜂鸣器等组成。
救生气囊系统采用独立供电,不会因为无人机坠机导致断电无法提供位置信息而难于寻找的情况发生。即使无人机坠落断电,救生气囊系统仍可正常运行,通过NB-IOT模块发送无人机的实时位置信息,并通过蜂鸣器和LED灯光使得无人机坠落位置更加便于寻找,降低搜索难度。
3 软件设计
无人机智能救生气囊的程序流程图如图6所示。系统的运行模块主要包括NB-IOT信号传输模块以及警告报警模块。其功能选择是依据具体情况而定,正常飞行状态下,传感器测距及NB-IOT模块持续工作,将无人机信息传输给操作者,当操作者意识到无人机可能处于危险状态可自主选择是否按下按钮实现气囊释放。若释放气囊,此时系统进入紧急报警状态,气囊释放并伴随有声光报警。

图6 程序流程图
在软件设计过程中先对系统进行可行性分析,设定测距传感器发出提示信号的合适距离,设定NB-IOT通讯模块在测量距离小于安全距离时向操作者发出报警信号发出的时机。
NB-IOT通讯模块使用UDP协议,在通讯模块运行过程中操作者不需要关注串口数据与网络数据包之间的数据转换过程,只需通过简单的参数设置即可实现操作者与无人机间的远距离数据传输。NB-IOT模块提供两路socket连接,在通讯过程中模块上电便实现自动驻网,通过GMS网络实现快速的信号传输。
4 结语
无人机智能救生气囊系统采用STM32单片机作为主控芯片来实现系统的各项功能,并结合物联网技术实现信息的快速传输,设计的系统可稳定高效地完成指定功能,对无人机起到一定的保护作用。该系统是一个可灵活安装于无人机上的独立保护装置,在不影响无人机正常工作的情况下对无人机进行保护,可减少无人机坠机危险,降低维修成本。
