酒醅上甑机器人的结构分析及其在清香型白酒酿造生产中的应用
2022-01-07陈兴杰杨金玉王法利夏元金
李 遥,陈兴杰,程 伟,李 娜,杨金玉,王法利,夏元金
(安徽金种子酒业股份有限公司,安徽阜阳 236023)
上甑作为白酒酿造的核心工序,往往要靠老师傅凭经验操作,要求做到“轻、松、匀、薄、散、准”,才能有效保证产酒的质量和产量;然而,酿酒车间上甑作业区的温度通常超过50 ℃,其工作环境湿热、劳动强度大,人工操作时常会因失误等导致出酒率不稳定。当前,酿酒上甑操作之前大多采用人工布料形式,酒醅人工上甑的劳动强度较大,生产效率、质量和出酒率等受人为因素影响大。因此,酒醅上甑机器人在酿酒行业逐渐引起大家重视,并得到不断的研发和应用,有效保证了蒸馏工艺的效率,降低了酿酒操作的劳动强度[1-3]。清香型白酒酿造过程中,经槽车发酵后的酒醅再由翻转机、螺旋输送机等输送设备进入蒸馏上甑工序。酒醅上甑机器人将红外探热技术与机器人相结合,把复杂的白酒上甑工艺,编程写入控制系统的机器人。由于安装了红外成像设备,当感知到酒甑温度开始变化,酒醅下已有蒸汽但还未冒出时,机器人的布料机构装置迅速而均匀地将酒醅铺撒在酒甑内,再盖上甑盖进行蒸馏[4-5]。目前,市场已有的上甑机器人多采用标准多关节机器人,配置末端执行布料机构的形式来实现布料,每次布料时均需要预先接满酒醅料,仅能实现单台机器人对一个酒甑的布料操作,效率较低、设备利用率不高;操作过程中,未能对甑内温度实现智能化监控,布料效果欠佳,出酒率与人工布料相比不具明显优势。
本研究从某型号上甑机器人的主要结构特点、工作原理和自动控制、在清香型白酒酿造生产中的应用等方面,进行分析和探讨。该型号上甑机器人配备的柔性送料端承载平台,其承载平台高度可控制,有效保证酒醅平缓的洒落在甄桶内,从而使铺撒的酒醅保持疏松,提升后期蒸馏的加工效果;而且,承载平台可以自转,在甄桶内无死角洒料运行。控制系统的蒸汽控制根据上甑工艺分为多阶段实行,上甑阶段调节方式为根据热源检测识别系统探测酒甑中蒸汽状况,自动调节蒸汽压力大小。通过该型号上甑机器人上甑与人工上甑的对比表明,机器人上甑时间符合工艺规定,同时,机器人上甑出酒率与断尾浓度均优于人工上甑。
1 酒醅上甑机器人的结构特点、工作原理与自动控制
1.1 主要结构特点
如图1 所示的某型号上甑机器人,其主要包括:底座部、回转部、大臂部、小臂部、布料皮带机、热源识别系统、工作面形态监测系统、控制系统等部分。其结构具有的显著特点主要有如下几个方面:①模仿人转身,机器人回转部可带动大臂部以左右旋转,能够在2 个酒甑间切换;②模仿人起身和俯身,大臂部可以俯仰运动,能随着酒醅布料层面增高而上升;③模仿人工手动铺料,小臂部有两个动作:360°无限旋转,-20°到-40°的摆动,可以模仿人工在酒甑上实现布料动作,布料出口安装布料皮带机,模仿人工水平铺洒。

图1 上甑机器人的主要结构部件及控制系统
上甑机器人的基座设置于立柱的下方,立柱的上方通过大臂旋转机构与大臂的一端连接,大臂的另一端固定连接小臂连接座,小臂连接座通过小臂旋转机构与小臂连接。小臂主轴为空心轴,其下端通过小臂摆动机构连接落料斗。螺旋输送机构设置于大臂支座的上部,其进料端设有进料斗,其出料端通过小臂主轴连通落料斗。大臂旋转机构包括位于大臂支座内的旋转电机和RV 减速机,旋转电机通过旋转电机过渡法兰与RV减速机的输入端连接,RV 减速机外圆与大臂支座相连,RV 减速机内圆端面与动臂相连。小臂旋转机构设置于小臂连接座上,其包括旋转电机减速机组、皮带轮组,旋转电机减速机组通过皮带轮组驱动小臂主轴旋转。小臂摆动机构包括相互连接的摆动电机减速机组和减速机吊耳,减速机吊耳固定于小臂主轴上,摆动电机减速机组与落料斗直接连接。
上甑机器人在上甑工艺执行方面的特点主要包括如下几个方面:①模仿人工作业:上甑设备要求做到自动上甑,一台上甑机器人负责两个(或三个)酒甑,无需人工辅助;布料头可以实现升降运动,能随着酒醅布料层面增高而上升,出料口自动跟随贴近料面布料,保证不砸料,不堆积,不起团;酒醅输送通过输送机可实现连续供料,将酒醅送到甑口;上甑时间可根据工艺要求在30~40 min/甑范围内调节;布料头可以实现360°旋转和90°摆动,模仿人工在酒甑上实现布料动作。②遵循传统工艺:采用热源识别系统来检测蒸汽分布情况,并引导布料头将酒醅准确布撒到将要穿汽的地方,实现连续“探气上甑”;采用工作面形态监测系统来检测酒醅铺撒的厚度或均匀性;上甑机器人既能自动控制相关外围设备的启停,也能单独手动控制;上甑机器人可自动控制酒甑、甑盖、蒸汽大小等,也能单独手动控制,可实现蒸汽控制与机器人布料动作联动。
应用过程中,上甑机器人还具有其他方面的显著特点:①安全:上甑机器人布料时运动部分只能在酒甑直径范围内移动,不得超出甑体范围;设备与原料接触部分必须采用食品级材质设计制作;设备设计制造必须具备防酸、防腐、防潮等特性;所有设备活动范围有警示标志,上甑机器人要有机械安全防护和电气安全防护;②设备清洗方便:上甑机器人具有自动清洁功能,能完成80%的清洁工作,省时省力;上甑机器人具有自动清洗模式按钮。
1.2 工作原理与自动控制
上甑过程中,通过立柱升降机构调节立柱的高度,以使机器人能适应相应蒸馏甑的作业要求。小臂上的热源感知系统和激光测距系统可以动态监测甑内温度,并迅速确定最高温度坐标位置。大臂旋转机构驱动大臂旋转到落料区,小臂旋转机构驱动小臂旋转,对落料方向进行进一步调整。最后小臂摆动机构驱动落料斗摆动,最终实现均匀、高效地布料,如此循环作业。皮带输送机实现将酒醅送到甑口(模仿工人运送酒醅),布抖动机构、布抖头等可以实现将酒醅均匀铺撒在酒甑里。工作面形态探测系统,可以检测酒醅铺撒的厚度或均匀性,热源检测识别系统主要用于检测蒸汽分布情况,并引导布料头将酒醅准确布撒到将要穿汽的地方(相当于上甑技师的眼睛),实现“见汽压醅”,图2 所示的上甑机器人酒醅热源探测识别系统成像,温差布料法避免了酒精蒸汽散失,提高了出酒率。
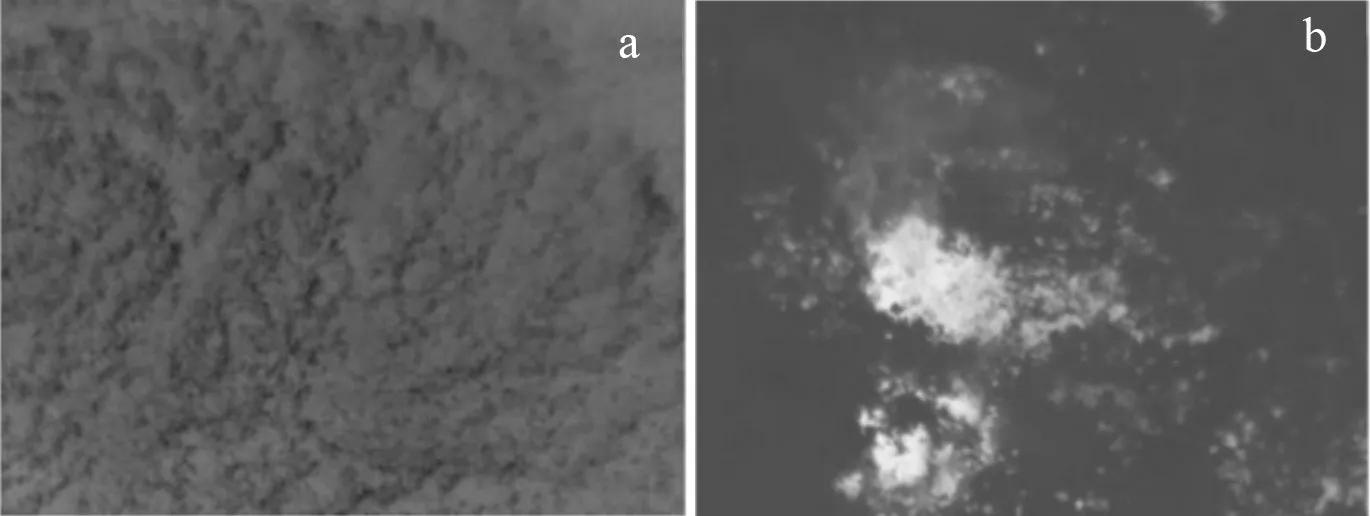
图2 上甑机器人酒醅热源探测识别系统成像
上甑机器人的软件配置主要包括:机器人控制器、控制软件、热源检测识别系统、工作形态探测系统等,上甑机器人的布料自动识别系统包括红外传感器、激光测距传感器、内嵌运算软件的控制器,红外传感器用于识别热源位置并向控制器发送实时数据。激光测距传感器用于感知距离并向控制器发送实时数据,控制器通过其内嵌的软件结合红外传感器和激光测距传感器传来的实时数据计算出热源的绝对坐标,同时可以屏蔽掉红外传感感知的罐体内壁的余温,有利于实现动态监测甑内温度并迅速确定最高温度坐标位置,最高温度处即为冒蒸汽最多处,也即是布料较少处,使布料智能化。
图3 为上甑机器人蒸汽控制系统的主要结构,控制系统的蒸汽控制根据上甑工艺分为多阶段实行,上甑阶段调节方式为根据热源检测识别系统探测酒甑中蒸汽状况,自动调节蒸汽压力大小。馏酒时调节方式为根据工艺设定压力值保持恒定压力,主系统根据酒甑压力传感器反馈值,进行PID 调节,达到稳定控制酒甑蒸汽。手动控制时,在触摸屏上切换至手动控制,设定需求阀门开关大小,系统控制阀门开关。关闭手动阀,可用现场并联手动阀门进行手动控制蒸汽大小。热源识别系统具有调节压力的作用,通过人工设置压力值,蒸汽控制系统接收压力值,蒸汽控制系统可以实现自动调节蒸汽大小。图4 为小曲清香型酿酒车间酒醅上甑机器人及其周边控制设备,配备有酒醅输送系统、蒸汽控制系统、水冷冷却系统、自动摘酒系统等。
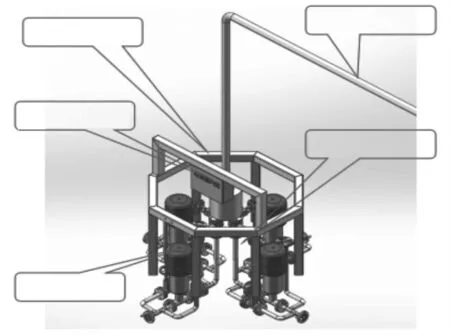
图3 上甑机器人蒸汽控制系统的主要结构

图4 酒醅上甑机器人及其周边控制设备(小曲清香型酿酒车间)
2 酒醅上甑机器人在清香型白酒酿造生产中的应用
根据酿酒工艺要求,对上甑机器人的功能及其配套设备的需求主要包括酒醅的输送转移,酒醅需要铺放到甑桶内的任意空间位置,甑桶内酒醅表面的温度或蒸汽等信息需要实时采集,顺利进行多个工位之间的切换等方面。随着机器人技术的发展,酒醅上甑机器人在白酒酿造行业逐渐引起重视,并得到不断的研究和应用,有效保证了蒸馏工序的效率,降低了酿酒操作的劳动强度。目前,通过实现原理和功能等进行分类,上甑机器人可分为基于关节机器人的上甑机器人和专用型上甑机器人等两大类。
2.1 结合上甑机器人的清香型白酒机械化酿造工艺
当前,酒醅上甑机器人主要配旋转酒甑作为应用较好的蒸馏方式,但实现精准探气和精细化铺料操作等较难控制,尤其是对于物料黏度较大的浓香型白酒[6],因此,上甑过程中通常辅以人工上料配合操作。酒醅上甑蒸馏的机械化方面还需要进一步改良上甑机器人,以更好的满足各种上甑工艺要求,根据不同香型白酒酒醅的特点满足上甑操作需要;同时,连续蒸馏有利于提高酒醅蒸馏的机械化程度,有利于实现酿酒过程的连续化。
机械化酿酒车间物料输送设备主要包括输送机、斗式提升机、管道泵配合管道输送设备和气力输送设备等,其中的输送机采取皮带、链式、埋刮板、螺旋等方式。在白酒酿造生产过程中,需要根据物料性质以及生产要求选择合适的输送设备[7-8]。酿酒发酵工序中,尤其是清香型白酒的发酵普遍采用槽车发酵工艺,使用叉车输送槽车;在窖池发酵的工艺,使用行车配合抓斗或吊斗等实现入池和挖窖的机械化操作[9]。图5 为酒醅上甑机器人及其配套酒醅输送设备,机械化输送设备的应用,降低了酿酒操作的劳动强度,改善了酿酒车间的工作环境。
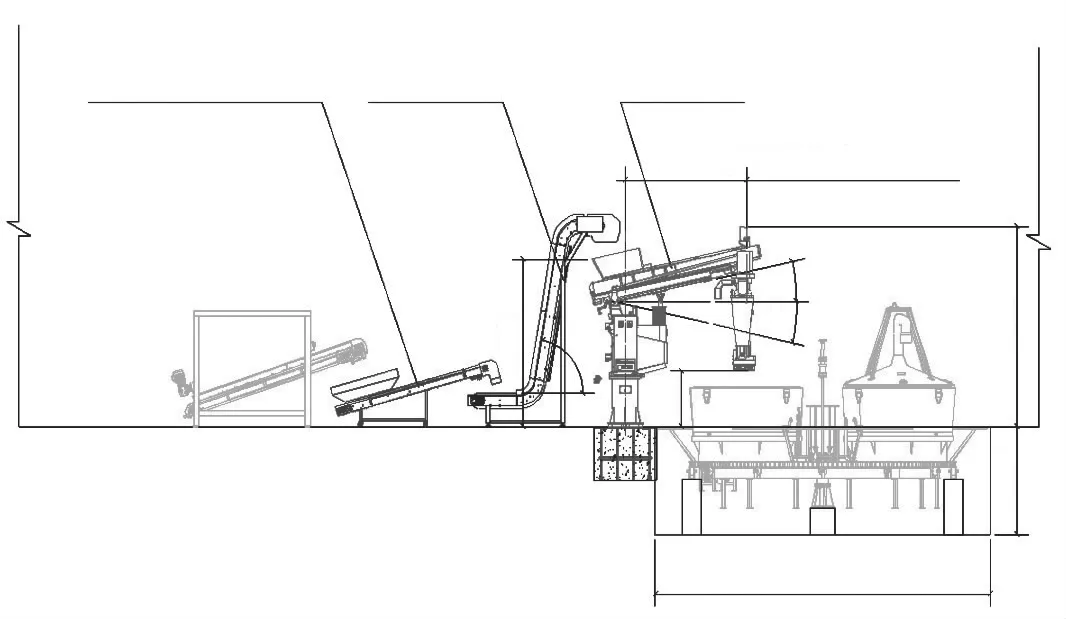
图5 酒醅上甑机器人及其配套酒醅输送设备
小曲清香型白酒酿造生产的蒸粮工序通常包括泡粮、初蒸、焖水、复蒸等4 个环节。传统的蒸粮工艺将原粮放入酒甑内完成泡粮、初蒸、焖水、复蒸等工序,蒸粮工序的劳动强度大、人工需求多、蒸煮时间长。目前,主要采用泡粮桶和带压蒸煮罐组成的泡粮蒸粮一体机完成蒸粮工艺操作,降低了劳动强度,减少了蒸煮时间;同时,改善了工作环境,取得了较好的应用效果,对提高原酒的出酒率起到积极的促进作用。
粮醅的摊晾操作是白酒酿造过程中的重要工序,传统的摊晾方式是通过人工翻拌和自然通风或机械通风的方式实现粮醅的快速降温,当前较多的是使用摊晾机作为通风摊晾设备。摊晾机的主体一般包含链轮输送机构、鼓风降温机构、机械翻拌机构等部分,根据不同的工艺需求,目前已形成能够满足加水、加曲、加酵母、低温摊晾、常温摊晾以及通过温度传感器自动控制调整风量的各种类型的摊晾机,基本满足了各种不同香型白酒酿造工艺的粮醅自动机械化摊晾操作。
目前,根据水资源条件和自然气候环境状况,主要应用水冷式冷却器、风冷式冷却器等蒸馏冷却设备。其中,水冷式冷却器通过冷却水与酒蒸汽的按序逆流,其冷凝速度快、冷却效率高;风冷式冷却器将酒蒸汽通过翅片管与冷却风交换热量,冷却效率高;同时,水冷式冷却器和风冷式冷却器均可以通过温度传感器实现酒温与冷却风量的自动控制。水冷式冷却器冷却效果较稳定,但水的消耗较大;风冷式冷却器虽节约用水,但是需要消耗电能,由于风的不稳定性和降温效率,导致冷却稳定效果稍差。
摘酒操作是生产高质量白酒的关键环节,传统摘酒方法包括“看花摘酒,量质摘酒和分段摘酒”等,传统的摘酒操作通常取决于摘酒工的水平和经验,出酒率和优质酒率都难以保证。图6 为清香型酿酒车间酒醅上甑机器人的实物图,配备有水冷冷却器、自动摘酒装置等设备。自动摘酒装置摘酒的主要操作方式是采用DCS 系统,在甑桶甑盖出口上设置温度变送器、压力变送器以及在出酒管道上设置酒精度、风味物质在线监测仪等,通过收集数据并进行比对判断,以控制接酒点自动调节阀的开闭。目前,自动摘酒在清香型白酒的摘酒中应用效果较好,由于浓香、芝麻香等香型白酒的摘酒分级较为复杂,因而不适宜采用自动摘酒方式。

图6 酒醅上甑机器人的实物图(小曲清香型酿酒车间)
2.2 机器人上甑的产酒情况对比
如图7 所示,应用上甑机器人后,9 月份产酒优级率较人工上甑平均优级率高出2.5 %,达到92.5%优级率目标,出酒率同比人工上甑有大幅上升,平均出酒率提升8.95 %。根据2—3 班所交付到酒库的酒质分析,机器人上甑与人工上甑的酒质无明显差异。相比出酒率情况,从7 月份机器人与人工各上一口甑的产酒分析,机器人上甑的单甑产量较人工上甑的单甑产量平均高出4.3 kg 左右。由表1 根据以上机器人上甑与人工上甑的对比可知,机器人上甑时间符合工艺规定;同时,机器人上甑出酒率与断尾浓度均优于人工上甑。

图7 清香型酿酒车间应用上甑机器人后的产酒情况对比

表1 采用机器人上甑的使用效果(清香型酿酒车间)
3 讨论
随着现代科技的进步与应用,白酒机械化酿造模式具有明显时代特征,减轻了劳动强度,提高了劳动效率,实现了白酒酿造的清洁化和节能减排,尤其是小曲清香型白酒酿造车间的机械化程度较高。机器人技术应用于传统的白酒酿造行业,对改进和完善酿酒生产工艺,解决酿酒行业的工作环境差,招工难等问题都有积极的意义。传统的白酒酿造设备,向机械化、智能化酿造设备成套生产线转型,具有重要意义[10]。在实际生产中,机器人上甑存在着“探气不准、铺料不均、压蒸”等问题,影响酒质和出酒率,仍需要不断开展理论研究与实践,从而为上甑机器人的研发提供指导。机器人上甑的研究与实践重点在于如何实现精准探气、精细化铺料,解决漏气等问题,还需要优化机器人的铺料运动路径,以提高响应速度,优化对上甑时间的把控,提高蒸馏效率。
