基于序列图像的高压断路器分闸速度检测
2022-01-05邢轩瑀陈培军孙鹏董华军
邢轩瑀,陈培军,,孙鹏,董华军,
(1.大连交通大学 机械工程学院,辽宁 大连116028;2.平高集团有限公司 河南 平顶山 467001)
高压断路器是电力系统重要的控制和保护设备[1],其操动机构作为断路器触头运动的动力来源,通过接受控制系统发出的信号,可以迅速驱动触头实现分合闸操作[2],因此高压断路器的操动机构动态特性对高压断路器工作能力有着极其重要的影响。操动机构主要可以分为电磁操动机构[3-4]、弹簧操动机构[5-7]、气动操动机构[8]、永磁操动机构[9]和液压操动机构。液压操动机构以液压油作为媒介,可获得较高的压力,同时有响应速度较快、速度调节方便、液压力输出特征与灭弧室负载力特性匹配良好等优点。电磁斥力机构具有运动速度快、动能大的优点,工作时可以产生较大的冲击和弹跳,适合高压断路器分闸时,高驱动力条件下的快速分闸运动。为有效提升断路器开断电路的能力,本文将2种机构结合,构建新型的联合操动机构。
快速开断可以直接降低电路故障对系统和设备的危害,可以在电流出现异常时迅速断开故障电路,阻断异常电流,降低不必要的经济损失[10-13]。发生故障时,开断时间越长,对电力系统设备损害就越严重,一般电路系统中有2条互为备用的馈线端,当一条线路故障时立刻切换到备用线路,期间每延长1 ms都会造成数以百万元的损失,所以研究高速开断有重要意义。
在高速开断过程中,对分闸速度进行高精度检测的传统方法有以下几种:光栅传感器法[14]、外加电容分析法[15]、滑动变阻器法、加速度传感器法[16]。光栅传感器法将光栅尺和操动机构相连,对操动机构在光栅尺上传递回的信号进行调制和放大,达到测速效果;该方法有体积小、重量轻和动态频率响应好等优点,但要求干涉条纹清晰,检测灵活性较低,对微小的运动检测不够灵敏。外加电容分析法将真空开关视作电容,通过检测真空开关电压的变化计算触头间距离,但触头并未完全绝缘,所以对触头间距的测量存在误差。滑动变阻器法将操动机构和滑动变阻器滑动端相连,通过检测滑动变阻器两端电压,计算操动机构的行程,该方法有着线性度好、精度高、寿命长等优点,但是对不同机构进行检测的时候需要制作不同的电阻,而且造价昂贵。加速度传感器方法将传感器头部与动触头相连,由传感器信号经采样处理得到动触头的运动图像,但在测量过程中由于相对晃动问题导致测量结果不准确。
基于序列图像的检测方法[17-18]区别于传统的速度检测方法,有着更高的精度,可对整个运动过程中的参数进行诊断;该方法为非接触检测方法,不需要在机构内部安装测量装置,通过计算多帧图像之间运动物体的位置差对运动目标进行有效的速度检测。
本文在图像处理检测技术的研究基础上,提出一种对高压断路器分闸速度检测的新方法,通过对斥力阀中斥力盘的运动图像进行采集和处理,从而分析出高压断路器分闸时的运动特性,为机器操动机构运动特性分析提供数据基础。
1 实验设计
实验由高速工况下试验样机平台和高速图像采集系统组成,拍摄现场如图1所示。试验样机平台为252 kV高压断路器,该断路器额定电压为252 kV,触头开距为(14±1)mm。高速图像采集系统基于CMOS相机实现,采用Phantom V1212型高速摄像机,其最大分辨率为1 280×800像素(本文图像的单位均为像素),内存容量144 GB,最大可扩展为8 TB。仪器满幅拍摄速率为12 680 帧/s,不低于1 000 帧/s,满足实验的精度要求。

图1 现场拍摄实景
操动机构为电磁斥力机构,结构如图2所示,该机构由拉杆、分闸线圈和斥力盘构成。斥力盘运动质量为4 kg,斥力盘半径为80 mm,分闸过程应在10 ms完成。斥力装置在联合操动过程中负责分闸动作,所以仅有分闸线圈,断路器执行分闸操作时,分闸线圈通过脉冲电流,该电流会感应出斥力盘中与线圈电流方向相反的涡流,从而产生斥力,驱动斥力盘带动拉杆实现与触头分闸。

图2 斥力阀结构
分闸运动时斥力盘沿轴向运动,将高速相机平行置于斥力盘所在平面,在空载运行条件下,高速相机采集开断过程中斥力盘的运动序列图像。利用LabVIEW Vision 软件对采集到的序列图像处理,处理得到分闸过程中斥力盘的位移和速度曲线,分析机械运动特性,并将本文方法与传统速度检测方法检测出的曲线进行对比。
2 算法介绍
2.1 目标检测算法
在同一场景中可能存在多个目标,但通常会选取其中一个进行分析,所以从目标图像中提取出某一单一目标是目标检测技术的难点[19-20]。在实验中斥力盘可以提供高压断路器的分闸速度等信息,本文基于序列图像对斥力阀机械运动特性进行检测。区别于单张图像,序列图像包含时域信息,因此可以同时在时域和空域对斥力阀检测。
本文基于序列图像选取时域空域结合的目标检测算法对斥力盘的机械运动特性进行检测,在同一帧内利用粗定位方法和Shi-Tomasi角点检测算法提取斥力盘的位置特征点,确定每1帧图像内斥力盘位置,再以某一静止背景为基准点建立坐标系,实现背景运动补偿。在此基础上,利用多帧序列图像间的时域信息对斥力盘的速度进行测定。
2.2 模板匹配
本文利用模板匹配的方法确定图像中斥力盘的位置,该方法可以通过图像的灰度、边缘、外形结构等特征对全局图像检索,检索出与模板相似的区域。模板匹配是后文目标对准、目标定位、目标测量等算法的基础。
实验采集到的序列图像中,斥力盘在运动时存在背景物体交叠的情况,对图形模板匹配方法影响较大。灰度模板匹配可以匹配重合度小于10%的模板,该方法具有平移旋转不变性,对尺度变化较为敏感,且处理模糊图像也有较好的表现。目标图片利用高斯滤波处理噪声后模糊较为明显,斥力盘的图像重合度小于10%,且需要对斥力盘进行定位和尺寸测量,符合灰度模板匹配的标准。
灰度金字塔利用金字塔匹配法处理灰度匹配,该方法通过对像素灰度归一化计算,处理复杂纹理时有较好的效果。线性归一化图像像素灰度
(1)
式中:E为原图灰度值;EMax、EMin分别为原图中灰度最大、最小值;EnewMax、EnewMin分别为归一化之后的灰度最大、最小值。
图像的匹配通过计算模板和目标图像之间的归一化相关值确定模板匹配的目标和区域,建立1个小窗口在目标图像上移动,将图片的左上角设置为坐标原点,进行检测,计算图像和模板的相似程度即相关值,即

(2)
式中:T(x,y)、f(x,y)分别为坐标(x,y)处的模板图像、原图像的灰度值;C(i,j)为目标图像中点(i,j)处的相关值;K和L为模板图像的尺寸。
实验中静坐标模板尺寸为97×398,动坐标模板尺寸为69×212,相关值均为800,移动步长均为1像素,从图片原点处开始移动匹配。由于实验中未涉及尺度旋转不变性,所以放弃算法中对尺度不变性和旋转不变性的支持部分,以提高计算速度。
2.3 坐标系的建立
本文通过建立坐标系检测角点在图像空间中相对于坐标原点的位置,标定角点后,对角点2帧图像间移动距离做差,进而计算出斥力盘在单位时间内的运动距离。
对图像的特征值进行计算时,通常以像素坐标为单位计算,将图片中的像素值和现实中的尺寸对应,使像素和真实世界的坐标系尺寸形成映射关系,更直观地计算出图像中斥力盘的运动距离。在实际实验中测量到A、B两点间距离为7 cm,通过软件计算出每个像素在X轴上代表0.294 1 mm,从而实现图像像素坐标和真实世界尺寸关系的映射,如图3所示,图中X、Y方向上每一小格长度为10 mm。
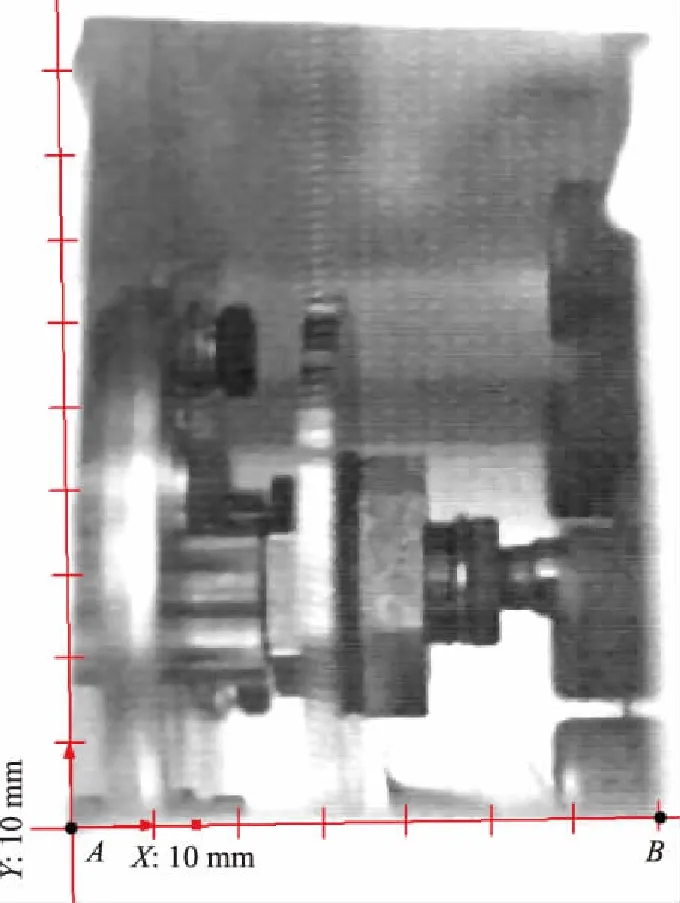
图3 尺度的标定
在运算过程中建立静坐标和动坐标2个坐标系。静坐标以背景中静止物体作为基准,消除相机拍摄过程中晃动导致的背景运动问题,实现运动补偿,其精准度直接影响整个实验的精度。目标图像中存在大量的角点,如果逐个检测会大大增加运算量,不利于实时检测。建立动坐标提取感兴趣区域(region of interest,ROI)检测角点,可以有效地提升处理效率。本文首先通过模板匹配定位到斥力盘并建立动坐标,然后利用斥力盘和角点的相对位置关系选取出1个大小为40×40的ROI,并从此ROI中检测出角点作为斥力盘位置特征点。
利用高斯滤波对图像降噪处理时会导致边缘不清晰的情况,因此选用LabVIEW软件中封装的IMAQ Find CroodSys (Rect)3算子建立坐标。该算子省略了边缘检测的部分,直接根据模板对坐标系进行定位,适用于较难找到目标清晰边缘的情况。
2.4 角点检测
为更精准地检测斥力盘位置,对斥力盘的角点进行定位,该方法相对于模板匹配方法直接定位特征点有着更高的精准度。
角点检测有计算量小、匹配简单和平移旋转不变性等优点,在角点处灰度值变化较大,可以通过计算图像中的角点获知图像局部信息,常用于目标跟踪。
本文利用Shi-Tomasi算法对角点进行检测。Shi-Tomasi算法作为一种基于Harris算法的优化,在原有算法上做了补充。
Shi-Tomasi算法的窗口相似度
E(u,v)=
(3)
式中:W为窗口像素区域;I(x,y)、ω(x,y)分别为原图像、窗口图像在像素点(x,y)的灰度值;u、v分别为水平、垂直移动距离。
对I(x+u,y+v)进行Taylor展开,舍弃高阶的微分小量,两窗口的相似度化简为

(4)
式中M为自相关矩阵,可以简化表示为
(5)
式中:Ix为I(x,y)对x求偏导;Iy为I(x,y)对y求偏导;A、B、C、D为矩阵中对应的值。
角点检测响应值
R=min(λ1+λ2)=min(A+C).
(6)
式中λ1、λ2为矩阵M特征值。可通过最低响应值检测出角点。
实验中对角点检测的最小响应强度为55,选择卷积核大小为5,金字塔匹配层数为1,可以得到如图4所示的检测结果,图中标“+”的点为检测到的斥力盘角点。
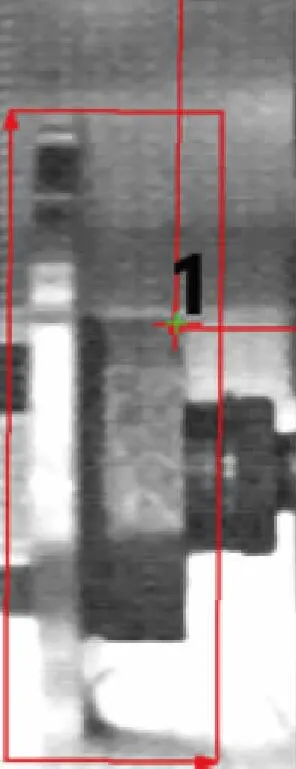
图4 角点检测
2.5 运动速度的检测运算方法
如图5所示,运动速度检测方法基本原理为:采用角点检测的方法检测出代表斥力盘位置的特征点,然后通过图中静坐标系X1-Y1确定斥力盘在机构中的位置,最后通过2帧图像之间斥力盘的位置差计算运动速度。

图5 速度检测示意图
具体计算方法为:
a)对图像预处理,包括灰度化、图像增强以及滤波降噪,让图像体现更多的细节。
b)对图像畸变矫正,标定图片中的尺寸,通过模板匹配选取建立静坐标系X1-Y1。
c)通过模板匹配的方法建立斥力阀的动坐标系X2-Y2,并通过动坐标和角点的相对位置关系,选取更精准的ROI检测出目标角点。
d)通过计算角点在静坐标系中的坐标位置变化,计算出斥力盘在分闸过程中的实际运动速度。
软件程序如图6所示。

图6 软件程序流程
3 实验结果
为证明该方法相比于传统速度检测方法有更高的精准度和灵敏度,在相同工况下用本文方法和其他2种检测方法对斥力盘的运动速度进行检测,并对得到的数据利用Origin软件进行拟合,将3种方法测出的数据置于同一张图中对比,如图7所示。
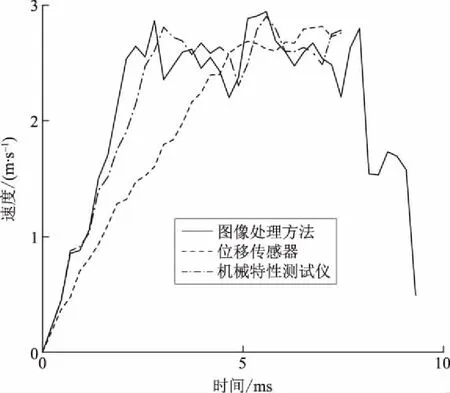
图7 斥力盘运动速度
采用本文方法对图像中斥力盘位置检测后,通过对2帧图像间斥力盘位置差求解平均速度,利用平均速度代替分闸的瞬时速度。实验中相机拍摄图片每2帧间隔为1/12 680 s,每3张图片为1组,约每0.4 ms求解1次,得到斥力盘在触头分闸时的机械运动特性,利用Origin软件对得到的数据拟合,见 “图像处理方法”对应的曲线。
图7中位移传感器法选用TRS40直线位移传感器,该传感器采用绝对位置测量,线性检测精度为±0.15%。机械特性测试仪法选用陕西博能电力技术有限公司研发的SWT-ⅧA型智能开关机械特性测试仪,速度测量范围为0~99 m/s,分辨率为0.002 3 m/s,测量精度为0.002 3 m/s。开关机械特性测试仪在传统方法中有着较高的测量精度,可以视为传统方法中的标准速度。
如图7所示,在起弧阶段0~2.5 ms内,斥力盘运动速度显著上升且具有较大的刚分速度。在2.5~7.9 ms内相对稳定燃弧,燃弧时间约为5.3 ms,斥力盘运动速度在2.2~2.9 m/s内振荡。7.9 ms之后,进入熄弧阶段,斥力盘运动速度下降并进入振荡阶段,完成熄弧。斥力盘运动速度在整个运动过程中为非线性运动,在燃弧阶段波动差为0.6 m/s,分析其主要原因可能为斥力盘与连杆间并未固定至完全相对静止,燃弧阶段速度较快且加速度并未增长,斥力盘运动时产生震颤,导致检测出速度波动较大。同时发现在6.7 ms时,由于拍摄或算法的原因,图像处理方法检测出速度在某一帧发生突变,但误差针对个别事件,通过筛选可以去除明显错误数据。
通过图7可发现,图像处理方法和机械特性测试仪器方法速度波形基本一致,且最大速度极其接近;但机械特性测试仪方法的速度曲线略滞后于图像处理法,说明图像处理方法提前检测出准确速度,且图像处理方法在燃弧阶段的波动幅度略大于机械特性测试仪,远远大于位移传感器。以上2点可以说明图像处理的检测方法具有更高的灵敏度。图像处理方法又和精度较大的机械特性测试仪方法速度更接近,所以图像处理方法同样有较高的精准度。
4 结论
本文利用图像处理的方法对斥力盘的运动速度进行检测,将Shi-Tomasi角点检测、模板匹配的算法应用到速度检测方法中,可以有效地检测出斥力盘的位置和机械运动特性,并有以下结论:
a)利用高速相机拍摄序列图像的方法可以有效检测出高压断路器在分闸过程中斥力阀的机械运动特性。
b)由于高压断路器分闸速度较大,传统速度检测方法都有着较大的误差。图像处理方法相对于传统方法有更高的准确度和灵敏度。
