基于MPU9250姿态传感器的隔离开关状态监测系统设计
2022-01-05杜跃宇邱书波
杜跃宇,邱书波
1.济南能源工程集团有限公司,济南 250011 2.齐鲁工业大学(山东省科学院) 电子信息工程学院,济南250353
目前,国内电力系统中的隔离开关分合状态一般是通过遥测信号来判断,并通过操作员观察的方式进行确认。这样的判断方式存在诸多问题,例如效率低、存在误判风险等。在无人值守的变电站,人员无法第一时间到现场进行观察确认,一般采用视频监控的方式来确认隔离开关分合状态,而基于图像的状态监测亦存在诸多问题,例如受环境影响大、部署困难、算法对样本依赖度高等。现有的隔离开关分合状态判断方式存在一定的局限性,因此开发一种行之有效、稳定可靠的隔离开关分合状态监测方法显得尤为重要[1]。
近几年,无人机、机器人等技术的快速发展,其中姿态传感器用于无人机、机器人的控制得到了很好的效果[2-3]。受此启发,将姿态传感器引入到隔离开关分合状态判断中,不失为一种好的思路。
通过研究四轴旋翼机和自平衡机器人的姿态控制,本文将四轴旋翼机和自平衡机器人常用的姿态传感器用于隔离开关的分合状态监测系统,基于姿态传感器设计了一种隔离开关的分合状态监测系统,它能够实时地对隔离开关的分合状态进行精确判别,为电力系统的安全运行提供了重要保障。
1 硬件设计
该状态监测系统由三部分组成,分别是安装在隔离开关上的姿态传感器、用于接收姿态信息并判断隔离开关分合闸状态的接收装置和用于在线显示分合闸状态并记录的上位机。
对于常规变电站,接收装置在对隔离开关分合状态完成判断之后通过开关量将判定结果传给测控装置;对于智能变电站,接收装置在对隔离开关分合状态完成判断之后通过开关量将判定结果传给智能终端。测控装置或智能终端再按IEC61850规约通过变电站控制层传送至监控主机。系统拓扑结构如图1所示。
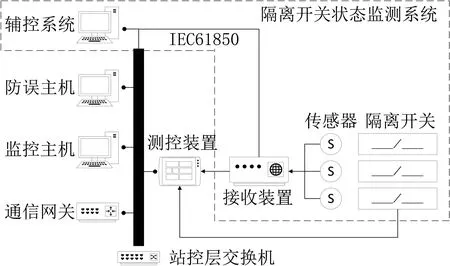
图1 基于MPU9250的隔离开关状态监测系统框图
1.1 姿态传感器硬件设计
姿态传感器基于InvenSense公司的MPU9250实现,MPU9250内部集成有3轴陀螺仪、3轴加速度计和3轴磁力计,支持SPI和 IIC总线,传输速率可达400 kHz/s。角速度测量范围最高达±2 000 (°)/s,动态响应特性好。加速度测量范围最大为±16 g,静态测量精度高。磁感应强度测量范围为±4 800 μT。集成数字运动处理器(DMP)可以整合九轴传感器数据,向应用端输出完整的9轴融合演算数据。核心MCU采用STM32F103RCT6,主频为72 MHz,程序存储空间为256 KB,通过IIC协议获取姿态信息后进行处理,然后通过Modbus-RTU协议与接收装置通信交互数据[4-6]。传感器系统框图如图2所示。
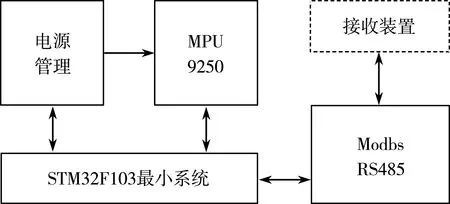
图2 传感器系统框图
传感器安装于隔离开关执行机构主轴,采集隔离开关分合闸时主轴旋转的角度,通过该角度来判断隔离开关分合闸状态,并将角度、加速度、角加速度等数据通过485总线以Modbus-RTU协议上传至接收装置。接收装置以此为依据对隔离开关分合闸状态进行判断,控制相应的开关量输出,并将数据通过IEC61850规约上传至监控主机。
1.2 接收装置硬件设计
接收装置主要用来处理传感器上传的数据,通过算法对数据进行分析,对隔离开关的分合闸状态进行判定,然后将判定结果通过IEC61850规约上传。接收装置主控芯片采用STM32F407VET6,它是一款带DSP和FPU的高性能ARM Cortex-M4 MCU,具有512 KB Flash、168 MHz CPU、ART加速器、以太网和FSMC[7]。接收装置的系统框图如图3所示。

图3 接收装置系统框图
接收装置应具备IEC61850通信功能,而在STM32F407VET6平台上是无法实现的,因此采用规约转换的方式将标准MODBUS协议转换为IEC61850规约通信,从而将隔离开关的角度、分合状态等信息传送至变电站后台。
1.3 其他外围电路
系统还包括存储电路和串口通信电路。其中,存储电路用来储存常温下门槛电压对应的标定值,作为程序判定开关量输入状态的依据。存储芯片采用的是AT25040AN,这是一款SPI接口的CMOS EEPROM,容量为4 KB。串口通信电路用来与上位机进行通信,作为调试与标定的接口。收发器采用的是SP3232EBEA,这是一款宽电压RS232收发器,采用增强型ESD规范设计,提高了通信可靠性。
2 隔离开关分合闸状态判定算法
隔离开关分合闸状态判定算法是在接收装置内实现的,判断依据是传感器采集上传的隔离开关角度数据,而隔离开关最终的状态判定还需要结合状态判断逻辑来完成。
2.1 隔离开关分合闸到位判断
姿态传感器实时地对隔离开关的角度进行采集,在部署时需要根据隔离开关的分合位置对传感器进行标定。设隔离开关的初始状态为合闸到位,此时将传感器标定为0度。当隔离开关为分闸到位时再对传感器标定为θo。设隔离开关的分闸到位和合闸到位的角度裕度为Δ,当姿态传感器被唤醒后测量出动作开始时的角度θs和动作结束时的角度θf,可根据公式(1)判断出隔离开关状态为由合到分且分闸成功。
θo-Δ≤θf-θs≤θo+Δ
(1)
当姿态传感器测得的角度满足公式(2)时,则可判定隔离开关的状态为由分到合且合闸成功。
-θo-Δ≤θf-θs≤-θo+Δ
(2)
当姿态传感器测得的角度值满足公式(3)时,则可判定隔离开关状态为分闸异常。
Δ<θf-θs<θo-Δ
(3)
当姿态传感器测得的角度值满足公式(4)时,则可判定隔离开关状态为合闸异常。
-θo+Δ<θf-θs<-Δ
(4)
2.2 状态判断逻辑
隔离开关的状态判断需要接收装置通过分析安装于A、B、C三相隔离开关上的传感器数据,分别对A、B、C三相隔离开关分合闸位置和状态进行判定,然后再依据位置和状态判断逻辑对该隔离开关分合闸状态进行判定,其位置判定逻辑如图4所示。
在完成位置判定结果的同时,位置判定结果又作为状态判定结果的输入参数,根据状态判定逻辑完成隔离开关的状态判断,其状态判定逻辑如图5所示。

图5 状态判定逻辑框图
完成状态判定后,接收装置会开出相应的硬接点,每个隔离开关对应3个开关量输出,其中1个接点对应传感器健康状态,另外两个接点对应隔离开关的分合闸状态。开关量输出逻辑如表1所示。

表1 开关量输出逻辑
3 软件设计及可靠性与经济性分析
3.1 软件设计
状态监测系统软件由姿态传感器程序、接收装置程序和61850协议转换程序三部分构成。其中,姿态传感器程序用来采集和解算姿态传感器采集到的角度、角速度、角加速度和地磁等信息,并将其打包成标准MODBUS通信协议数据格式,供接收装置查询或通过中断方式送接收装置;接收装置程序用来查询或中断接收姿态传感器上行数据,依据分合闸判断算法和逻辑判断算法判断出隔离开关的状态,并控制相应的开关量输出动作;IEC61850协议转换程序用来将接收装置获得的角度、判断的隔离开关状态、控制的开关量输出状态转换为MMS协议经站控层上传至变电站监控后台。姿态传感器程序流程图如图6所示。

图6 传感器程序流程图
姿态传感器程序初始化后,加载传感器配置,循环监测姿态数据,通过MPL库解算出三轴加速度、角速度、磁力值和温度,通过卡尔曼滤波算法对数据进行处理,将数据进行校正后进行MODBUS标准格式打包[8-10]。若接收到接收装置的数据请求,则将其发送给接收装置。另外,当检测到大角度变化时会唤醒发送中断,将数据上传至接收装置。
接收装置程序初始化后,加载接收装置配置信息,开始循环查询各个传感器数据,根据收到的传感器数据判断出隔离开关状态,根据状态输出相应的硬接点,并将数据打包成MODBUS协议标准数据包,通过串口发送给IEC61850协议转换模块。协议转换模块根据数据点表将数据映射到IED模型,最终实现IEC61850通信功能[11-12]。接收装置的程序流程图如图7所示。
图7 接收装置程序流程图
3.2 可靠性试验
为了验证系统的可靠性,对系统进行了200次的重复性模拟试验。模拟试验包含两个试验项目,第一为传感器测量精度试验,第二为分合闸状态判定一致性试验。
传感器测量精度试验方法为:在-360~360°范围内通过转台对传感器施加不同角度,分别记录转台施加角度值和记录传感器真实角度测量值,计算角度测量误差。试验结果如表2所示。
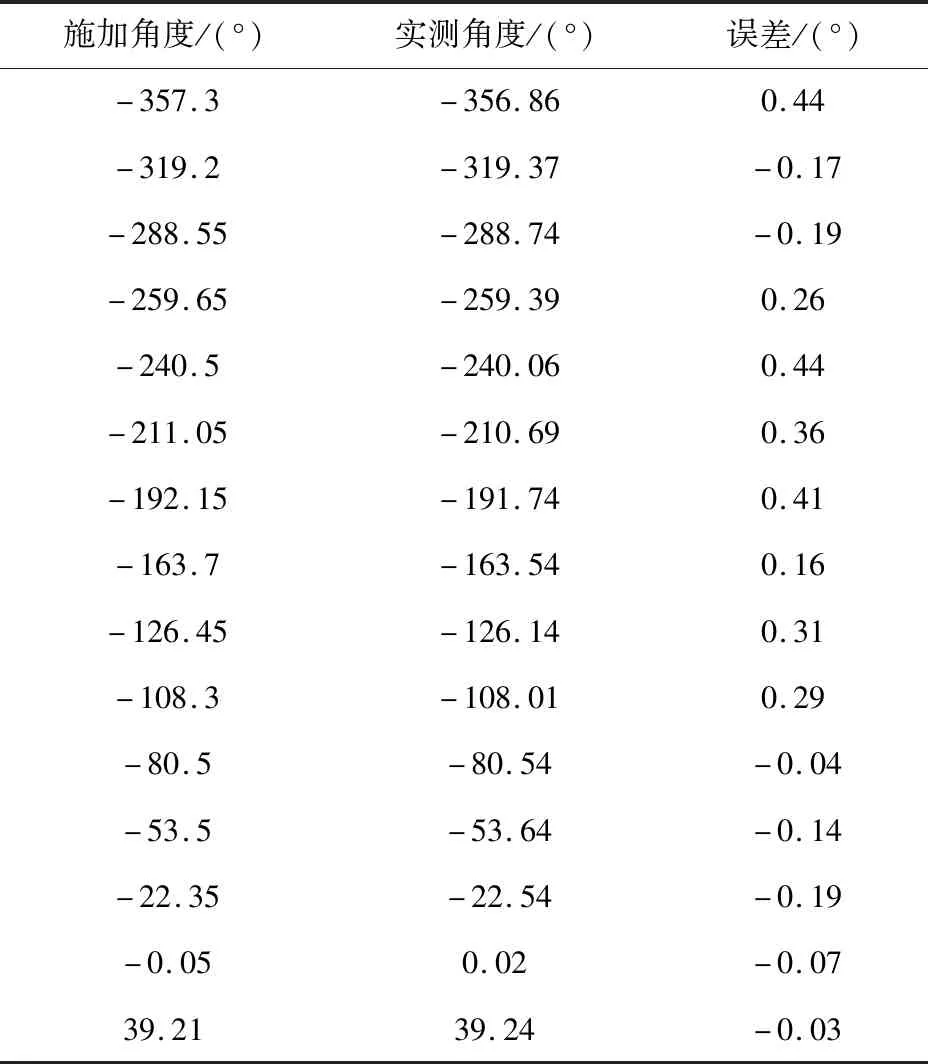
表2 传感器测量误差

续表2
表2为-360~360°范围内同一传感器分别在不同给定角度下的实际测量值,可以看出,测量值在不同给定角度下测量误差略有变化,在测量过程中误差略有累积,但是,测量误差和累积误差均未超过标准要求的最小误差0.5°,因此可以断定,该装置的传感器系统可以准确测量隔离开关的角度。
分合闸状态判定一致性试验方法为:模拟实际应用过程,将传感器固定于隔离开关操作机构主轴,通过操作机构主轴的转动模拟隔离开关的分合。对系统进行了四种状态下每种状态100次的模拟试验。实验结果如表3所示。
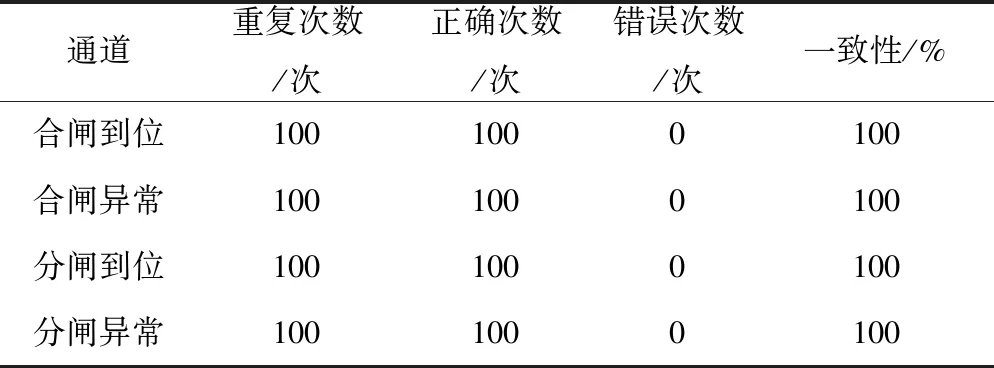
表3 分合闸状态判定一致性实验结果
表3为模拟四种状态下隔离开关分合闸动作一致性实验结果,可以看出,通过400次的分合闸动作其中四种状态判定准确度达到100%,满足实际应用需求。因此可以判定,该装置可稳定、准确地判定隔离开关分合闸状态。
由以上实验数据可知,该系统能够稳定、可靠、实时地监测隔离开关的分合闸状态。
3.3 可靠性与经济性分析
基于MPU9250的隔离开关状态监测系统引入了传感器误差自校正算法和传感器通信故障自恢复机制,同时接收装置对上通信采用了冗余设计,可以通过光纤、网线、RS485和无源接点的方式实现对上位机通信,确保系统从末端数据采集到中端数据处理与结果上传环节,以及终端结果确认的各环节的可靠性。该系统作为智能变电站一键顺控的重要组成部分,能够帮助电力运维人员在远程进行分合闸状态判断,不仅将原有的停(送)电时间由30 min缩减到了5 min,还在一定程度上节约了人力资源,解决了运行人员不足的问题,具备良好的经济性。
4 结 论
本文设计的基于MPU9250的隔离开关状态监测系统,通过MPU9250九轴姿态传感器实时监控隔离开关的状态,将状态信息传送至接收装置,接收装置根据姿态判断算法和逻辑判断算法对隔离开关的分合闸状态进行实时判定,给出相应的硬接点输出,同时将状态信息通过IEC61850通信规约上传至站控层监控后台。该监测系统能够有效地实现隔离开关分合闸状态的实时监控,为变电站隔离开关的“双确认”提供了有效的判据。实验结果表明该系统稳定可靠、实时性及可操作性强,能够有效提升变电站隔离开关状态监测准确度,对变电站的智能化发展具有重要意义。
