复杂地形环境下基于CL-KA-STAP的低空风切变风速估计方法
2022-01-04谢伶莉张志宁
李 海 谢伶莉 张志宁
(中国民航大学天津市智能信号与图像处理重点实验室 天津 300300)
1 引言
天气条件直接影响民航运输的安全与效率,在影响民航运营安全的这些极端天气现象中,低空风切变是民航业最警惕的天气之一,其典型特征是持续时间短、瞬时强度大、变化多端、危害性高[1]。飞机在起降过程遭遇风切变,由于此时飞机高度低、速度慢,飞机操控性及稳定性急速下降,因而危害很大。随着国家大力推进机场建设的步伐,中西部高原地区需建设的机场越来越多。目前,我国是世界上高原机场最多的国家。建设在高原地区的机场,由于海拔较高,机场地面接近大气层的中层,乱流多,风场变化大,低空风切变明显,同时复杂的地形环境也会增大风切变的探测难度,给航空安全带来重大威胁。
机载气象雷达作为飞行气象环境实时探测的重要手段,已经成为民航飞机必备的电子设备。工作于低空风切变模式时,机载气象雷达天线波束指向地面,气象目标回波被淹没在强地杂波中,而且机载平台运动会造成地杂波频谱展宽,因此地杂波抑制变得更加困难,而地杂波抑制不充分时会影响风速估计结果。NASA提出了负数最小均方误差自适应噪声消除器来抑制主瓣地杂波[2],以及构建气象目标及地杂波两类目标的模式分类器抑制地杂波[3]。上述方法是基于单天线机械扫描气象雷达,通过固定参数的滤波器进行杂波抑制,不具有自适应能力,不能随地表环境的变化而变化,因此杂波抑制能力不足。
对于相控阵体制的机载气象雷达,可利用空时自适应处理(Space-Time Adaptive Processing,STAP)技术[4],在空时联合域中获得更好的地杂波抑制效果,提高对目标的检测能力。文献[5]提出一种基于空时最优处理的风速估计方法,文献[6]和文献[7]分别提出了基于M-CAP的低空风切变风速估计方法和基于组合空时主通道自适应处理器(Combined space-time Main Channel Adaptive Processor,CMCAP)的低空风切变风速估计方法,空时最优方法能在全维域中充分抑制强地杂波并准确估计出风速,M-CAP方法和CMCAP方法属于降维类STAP方法,处理过程中能够有效降低运算量,然而上述方法都是在均匀杂波环境中提出的,在实际复杂地形环境中,地表起伏不平,植被覆盖多样,地杂波呈现非均匀特征,往往难以获得足够的独立同分布(independent identical distribution, iid)样本,导致传统STAP方法性能损失,造成杂波抑制不充分,从而影响风速正确估计,因此研究如何在复杂地形环境中准确估计风切变风速的方法十分重要。近年来,为克服所需iid训练样本数不足的问题,知识辅助STAP(KA-STAP)技术获得广泛关注,利用雷达工作环境的先验知识(雷达参数、数字高程地图及地表覆盖数据)辅助滤波器的设计,有效提高STAP在非均匀杂波环境下的目标检测能力。文献[8,9]利用地形分类数据和数字地图信息的辅助提出了样本筛选的方法,文献[10]在非均匀杂波背景下提出了知识辅助的贝叶斯方法,文献[11,12]对小样本条件下协方差矩阵的估计问题展开了研究,文献[13]将先验知识引入滤波器约束函数的设计,给出了色加载(colored loading)知识辅助算法(Colored-Loading Knowledge-Assisted STAP, CL-KA-STAP)。然而利用KA-STAP方法来提高复杂地形环境下风切变风速估计准确性的研究还未有文献报道。
基于上述背景,本文提出一种复杂环境下基于CL-KA-STAP的低空风切变风速估计方法。该方法首先利用构造的降维联合时空变换矩阵对待检测距离单元(Cell Under Test, CUT)的回波数据进行降维处理,然后在组合空时主通道自适应处理(CMCAP)方法降维处理后的变换域中结合数字高程模型(Digital Elevation Model, DEM)和国家土地覆盖数据(National Land Cover Data, NLCD)获取的杂波先验知识构造色加载系数优化函数求解色加载系数,最后构造滤波器的最优权矢量,进行自适应滤波,进而准确估计风场风速。该方法实现了在iid样本数难以满足降维类STAP滤波器需求情况下风速的准确估计,且该方法在先验信息存在误差情况下具有较强鲁棒性。
2 机载气象雷达回波信号模型
机载前视阵列雷达由N元均匀线阵组成,其下视探测低空风切变时如图1,机载平台处于高度H且以速度V运行,θ0,φl分别表示风场目标的方位角和俯仰角,θ,φ分别表示地面散射体相对于天线轴向的方位角和俯仰角。相干处理间隔内脉冲数为K,脉冲重复频率为fr,雷达最大作用距离范围内有L个距离单元,第l(l=1,2,...,L)个距离单元的空时2维快拍数据x(l)表示为
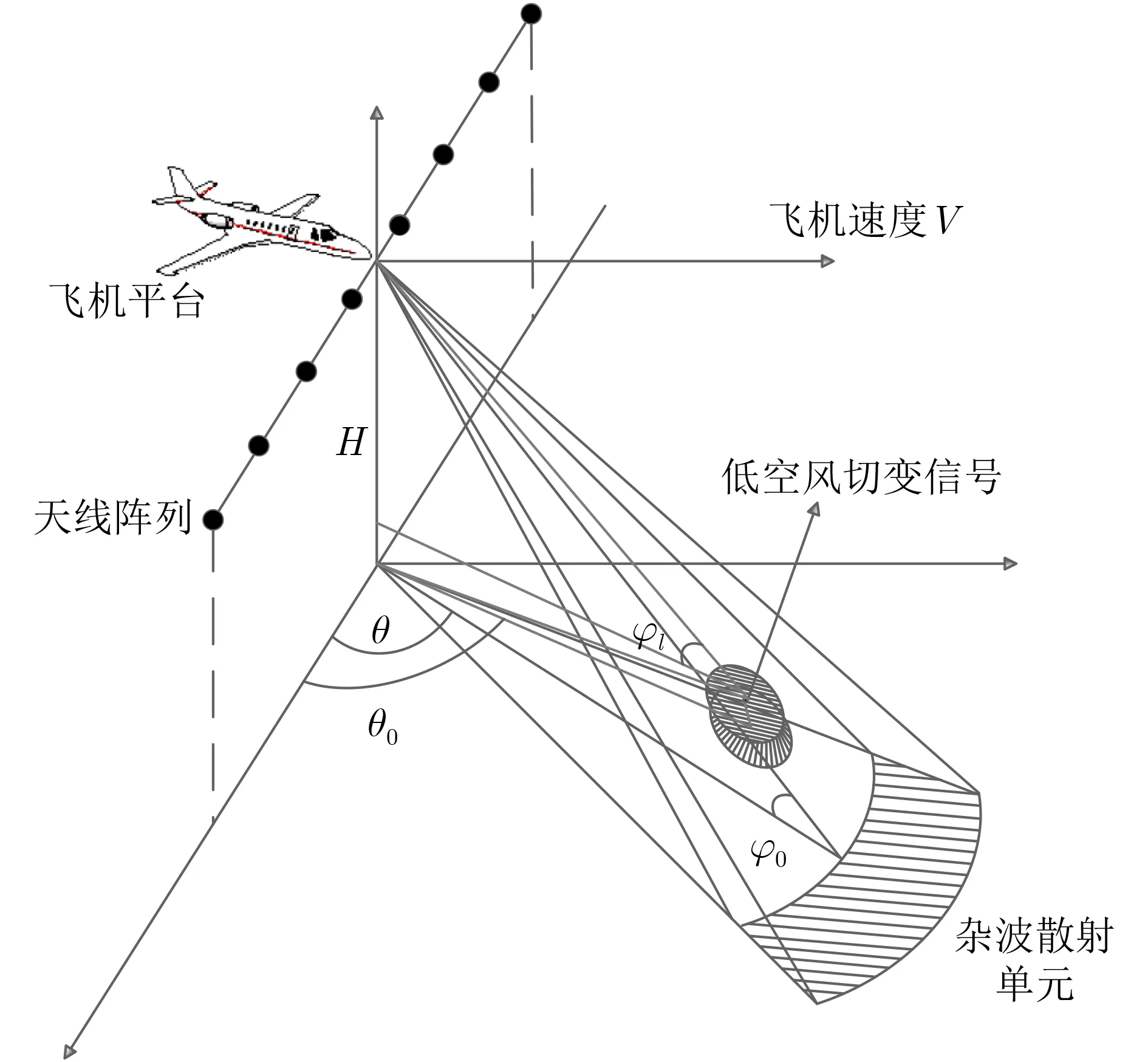
图1 机载平台下视探测低空风切变几何模型

其中,n为高斯白噪声,s(l),c(l)分别为第l个距离单元的低空风切变信号和非均匀地杂波信号,本文采用在Ward模型基础上融合DEM和NLCD数据得到高保真地杂波的仿真[14]。
s(l)表示为

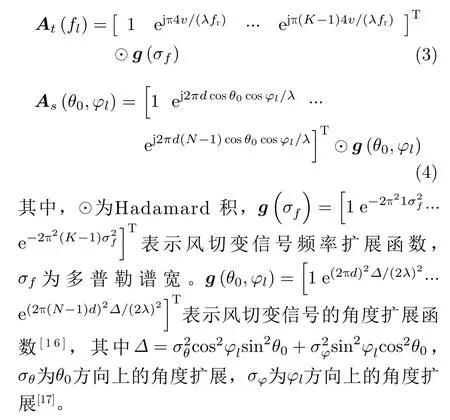
其中,Γ为风切变信号回波复幅度,A(ψ0,fl)为风切变信号的空时导向矢量,ψ0为风切变信号空间锥角,且cosψ0=cosθ0cosφl,fl(fl ∈[−1,1])为风切变信号的归一化多普勒频率,At(fl),As(θ0,φl)分别为风切变信号的时域导向矢量和空域导向矢量,表示为[15]
3 CL-KA-STAP的低空风切变风速估计方法
CL-KA-STAP的低空风切变风速估计方法首先构造降维联合时空变换矩阵,对CUT回波数据进行降维处理,然后在降维处理后的变换域中结合杂波先验知识进行色加载系数的优化求解,最后构造降维处理器的最优权矢量,对数据进行自适应滤波,准确估计风场速度。本文方法的关键步骤是构造联合时空变换矩阵,色加载系数优化求解以及低空风切变风速估计,下面将分别对其进行详细描述。
3.1 构造联合时空变换矩阵
实际场景中,为了减少计算量,选择在CMCAP降维之后的变换域进行色加载处理,CMCAP方法原理图如图2所示。

图2 CMCAP方法原理图
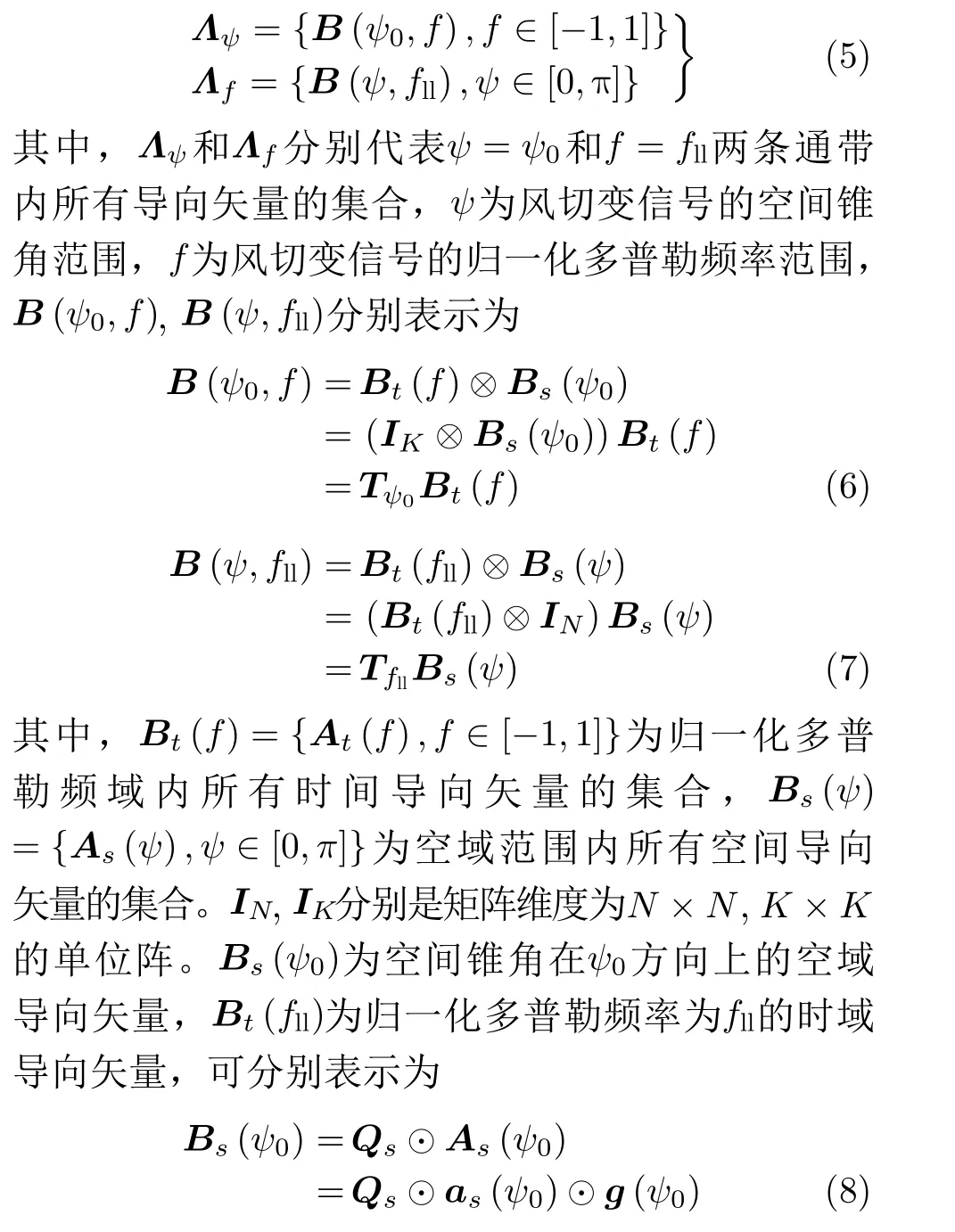
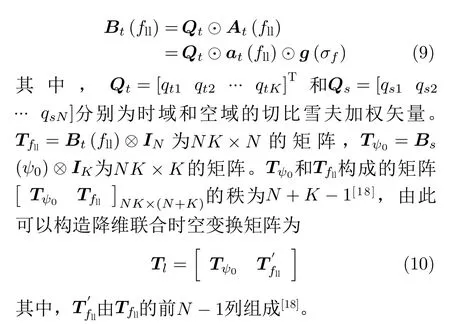
假设风切变信号方位ψ0已知,且当前距离单元风场信号主多普勒通道的归一化多普勒频率为fll(fll∈[−1,1]),通过对空域主波束与时域主通道进行深加权,可使进入后级处理的杂波只局限于时空2维平面中两条正交主通道内[18]。第l个距离单元内风切变信号的空时导向矢量为A(ψ0,fll),则辅助波束在ψ=ψ0和f=fll两条通带内选取,定义两个2维导向矢量的集合
3.2 基于CUT单元色加载矩阵预白化性能评估(Pre-Whitening, PW)的色加载系数优化求解(CPW)


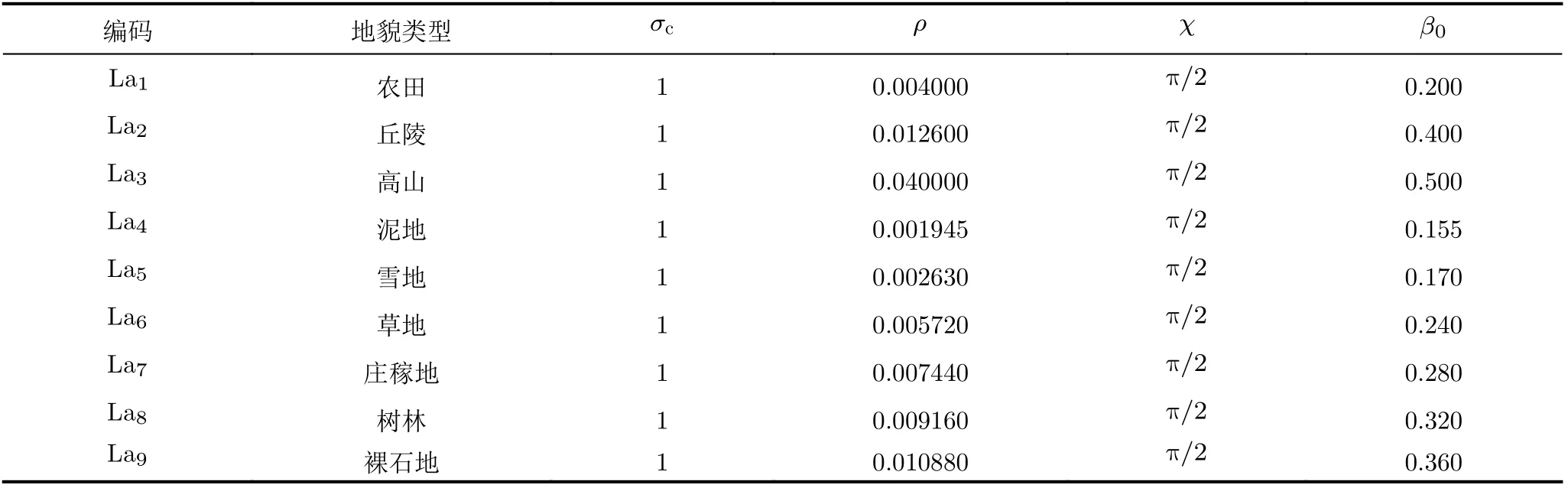
表1 不同地貌类型的参数值

(2)估计矩阵。实际场景中,估计矩阵R¯B(l)需经样本筛选得到不含目标且与第l个CUT杂波信号满足独立同分布条件的参考单元,本文对雷达回波数据进行距离依赖性矫正后,采用文献[23]中的方法进行样本筛选,设筛选后的总样本个数为I,选取其中Q个样本构成估计样本集,文献[19]讨论了Q的选择对色加载矩阵预白化性能的影响,并建议Q=I/2以适应不同的杂波场景环境,则估计矩阵可表示为
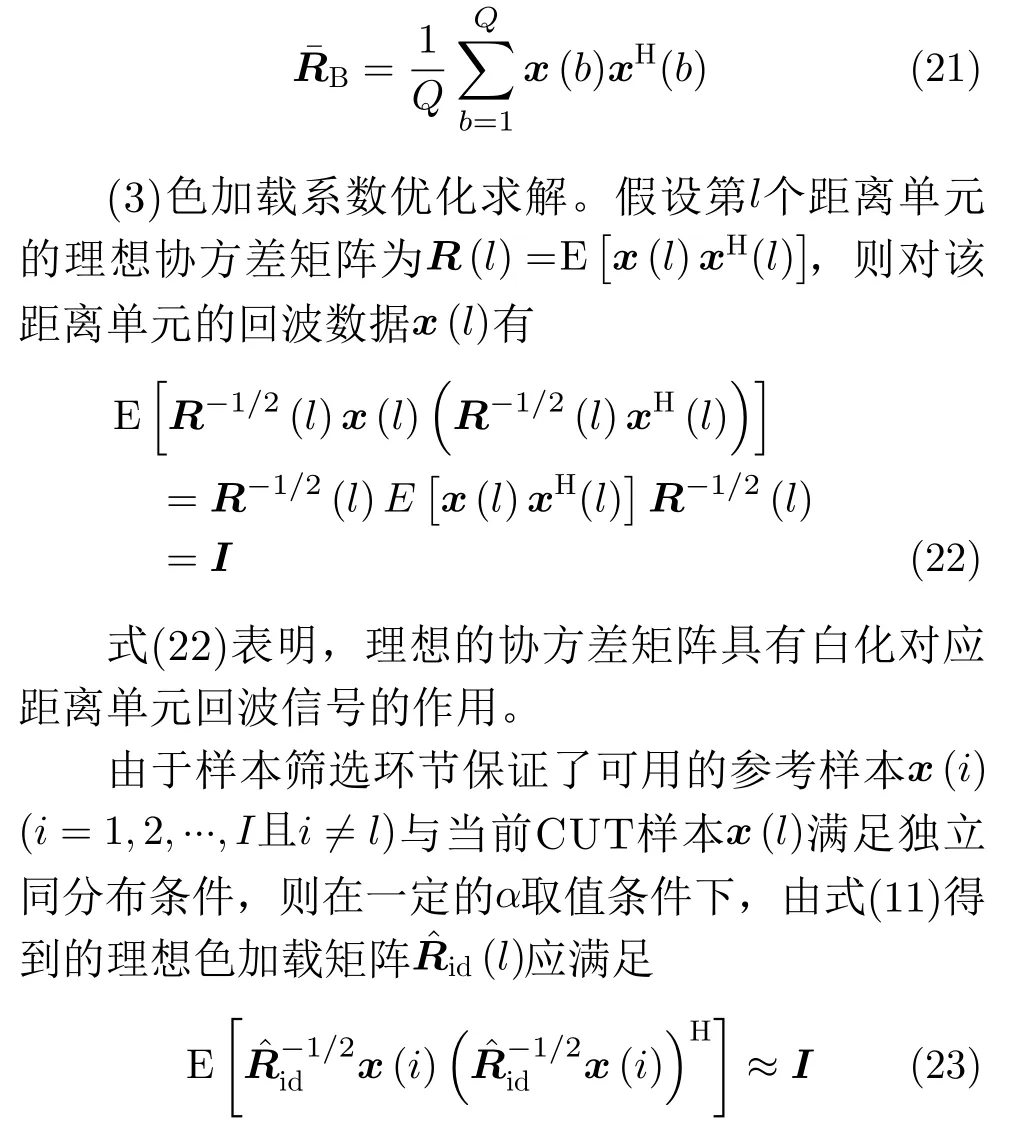
为避免CUT内可能含有的目标信号的影响,依据式(23)描述的预白化性质来实现当前CUT色加载系数α的优化求解。
在对α的优化求解过程中,防止用于构造色加载矩阵的样本与用于测试其预白化能力的样本重复,导致优化结果倾向于样本估计矩阵的情况[24],利用剩余的P=I −Q个样本来构造CPW优化函数中的测试矩阵

3.3 低空风切变风速估计
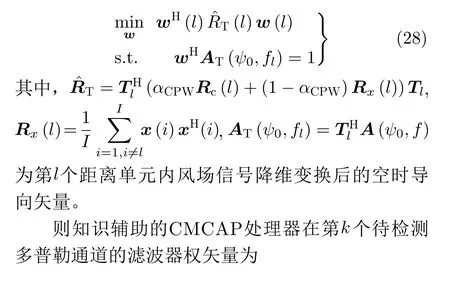
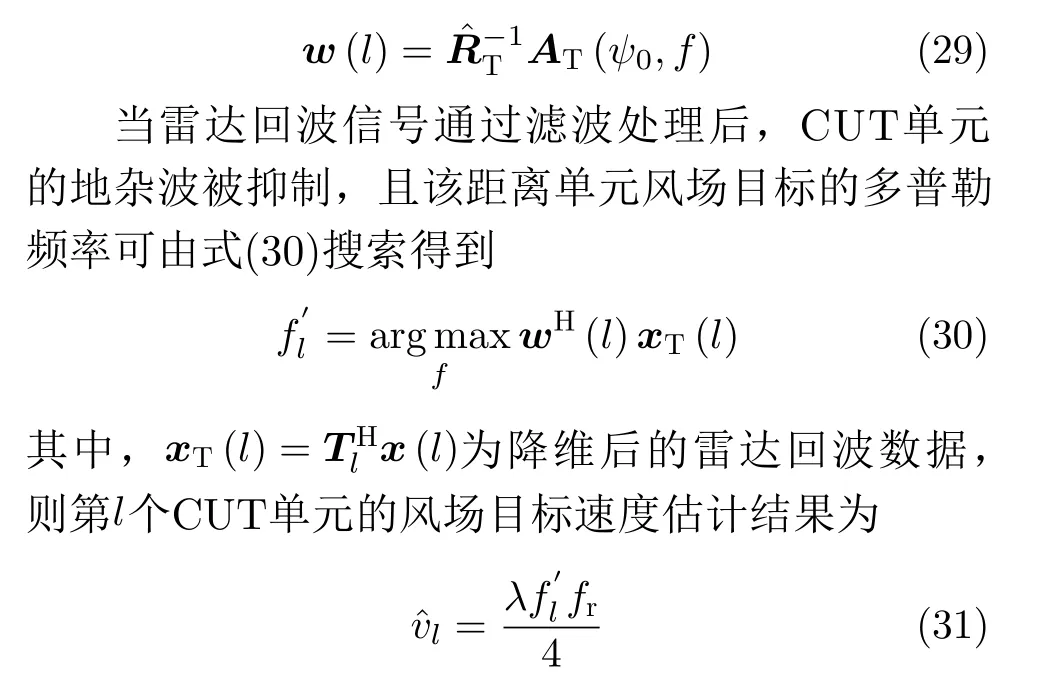
由上述步骤得到色加载系数结果后,结合样本筛选得到的全部参考单元设计滤波器[24]。根据LCMV准则,第l个距离单元内的CMCAP降维域色加载处理滤波权满足下述方程
4 方法流程
本文CL-KA-STAP的低空风切变风速估计方法流程如图3所示。

图3 CL-KA-STAP的低空风切变风速估计方法流程
5 仿真结果及分析
5.1 仿真条件描述
本文选取位于美国科罗拉多高原地区的DEM数据进行非均匀杂波仿真,区域范围为北纬36°10′~36°60′,西经112°50′~112°00′,NLCD数据显示该区域地貌类型包括高山、灌木丛、阔叶林树林、裸地石头以及水面,以反映高原机场的复杂地理环境,低空风切变场分布于飞机前方8.5~16.5 km处,飞机和雷达的仿真参数由表2给出。

表2 飞机与雷达参数
为了验证本文算法在先验信息存在误差时仍具有一定的鲁棒性,u取值分别为0.1, 0.3, 0.5。经样本筛选后,选取参考单元样本个数为I,设定用于构造测试矩阵的样本个数为P=I/2,以增加该算法对先验知识存在误差的不同场景杂波的适应能力。
5.2 仿真结果分析
所选区域数字高程数据如图4(a)所示,此区域内海拔高且变化剧烈,图4(b)展示了该地理环境下地杂波的距离多普勒图,从图中可以看出,杂波的非均匀性和非平稳性现象十分明显,在多普勒主瓣距离门附近有一系列强杂波,表现了高原地区回波数据特征,并且由于山体的遮蔽效应,距离门80-120范围内的杂波功率很小。

图4 非均匀地杂波数据特征
图5所示为前视阵机载气象雷达回波信号的空时2维谱,地杂波谱呈半圆形分布,体现了前视阵雷达杂波谱的空时耦合特性,低空风切变信号在空时域存在一定的展宽,以一条“窄带”形式呈现,并且从图中可以看出地杂波信号的回波功率远大于低空风切变信号的回波功率,导致风场回波多普勒信息完全淹没在地杂波的多普勒信息中,严重影响民航飞机航路上风切变的速度估计与检测。

图5 机载气象雷达回波空时2维谱
图6为本文方法对第89号距离单元进行自适应处理的滤波器频响图。从图中可以看出,本文提出方法在零多普勒频率处形成了明显的滤波器凹口,同时在-0.17归一化多普勒频率处形成了高的信号增益,实现了对地杂波的滤除并且有效匹配到低空风切变信号。
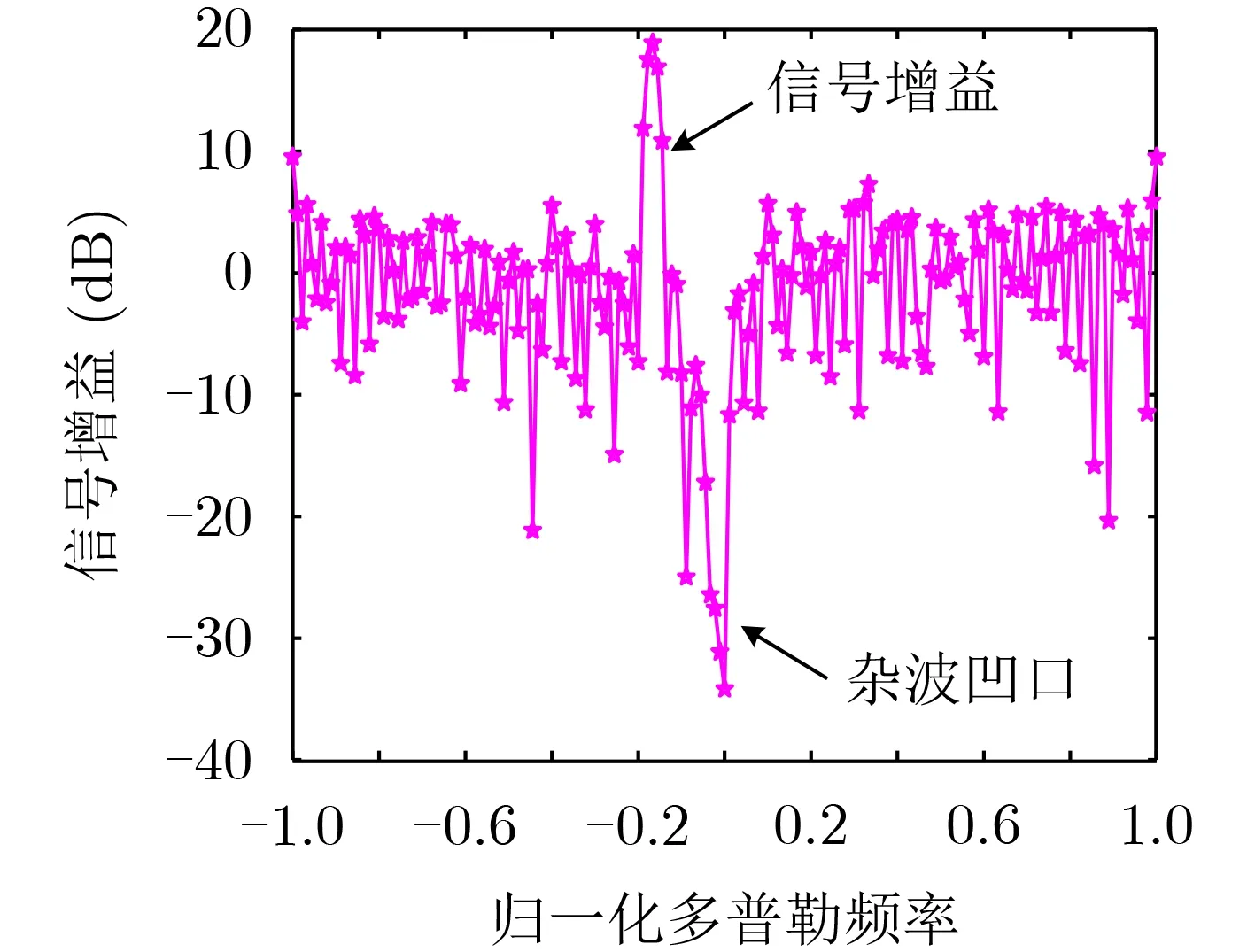
图6 第89号距离单元滤波器频响图
图7为不同方法下风速估计对比图,以CMCAP方法系统自由度为基准,当样本数只有0.5系统自由度时,由于非均匀地杂波环境下所需的iid样本数无法达到RMB准则,空时最优STAP和CMCAP方法性能恶化,已经无法得到准确的风速估计结果,而本文所提方法在相同情况下仍然能准确估计风速;减少样本数至0.25系统自由度,对比研究因子法(Factored Approach, FA)和扩展因子法(Extended Factored Approach, EFA)可以看出,本文所提方法估计结果稳定,FA和EFA算法滤波器性能损失,某些距离单元内强地杂波没有被抑制干净,导致风速估计结果不准确。
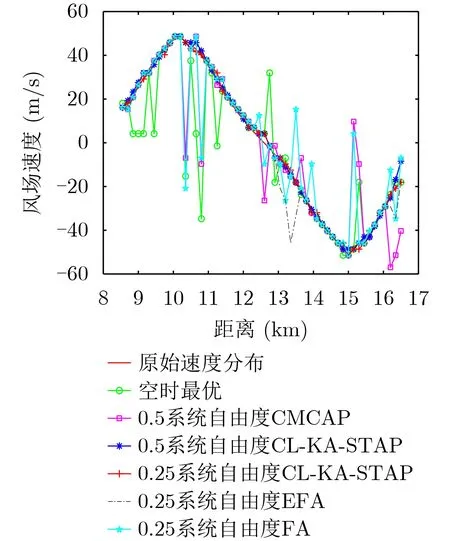
图7 不同方法风速估计结果
表3为不同风速估计结果的均方根误差结果对比,说明本文所提方法在独立同分布样本数缺乏较严重情况下,误差水平低于传统STAP方法,能够准确估计风速。
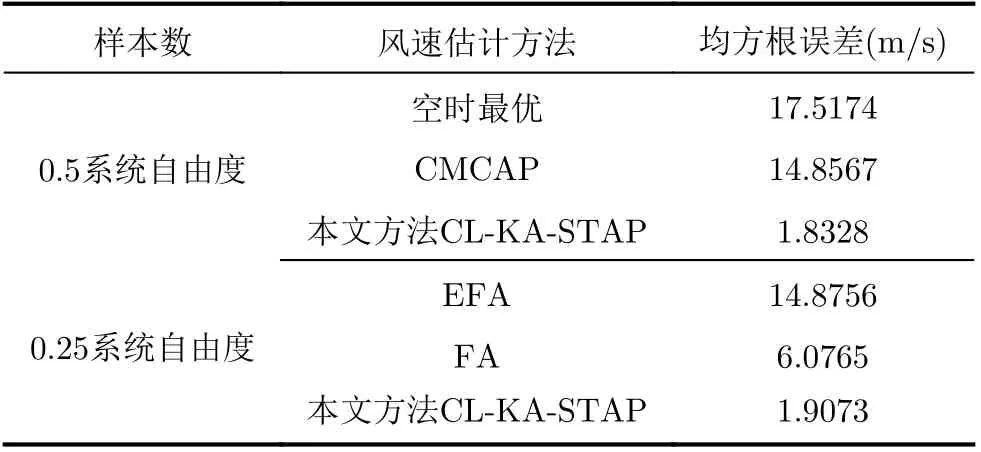
表3 不同风速估计方法结果对比
研究先验信息存在误差时对本文所提方法的影响,从表4可以看出样本数为0.5系统自由度和0.25系统自由度时,随着先验信息误差增大,αCPW的取值减小,说明本文所提方法能够有效评估待检测单元的先验信息性能,自适应地调节先验协方差的比重,图8为先验信息在不同准确度情况下风速估计的误差,说明由于该方法能够通过优化色加载系数αCPW来调节不同准确度先验信息的占比,从而在不同误差情况下仍然能得到准确的风速估计结果,表明了该方法对先验信息性能的非均匀性具有较强的鲁棒性。
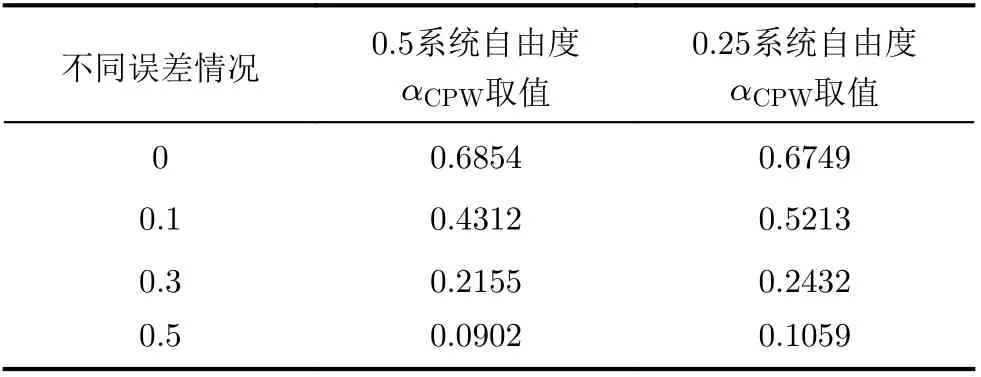
表4 不同误差情况下αCPW的取值

图8 先验信息存在误差时风速估计误差结果
6 结束语
本文针对机载气象雷达在复杂的地形环境下探测低空风切变时,地杂波呈现的非均匀特征导致难以准确获得杂波统计特性,进而影响杂波抑制效果,使得风切变风速估计不准的问题,提出了一种基于CL-KA-STAP的低空风切变风速估计方法。该方法首先利用构造的降维联合空时变换矩阵对CUT雷达回波数据进行降维处理,然后将由DEM和NLCD获取的杂波先验信息融入到CMCAP处理器中,构造色加载系数优化函数求解色加载系数,最后构造降维处理器的最优权矢量,对降维后的数据进行自适应滤波,并实现风场速度的准确估计,该方法对于先验信息准确度非均匀性问题的鲁棒性使其在KA-STAP技术通常面临的复杂非均匀杂波场景中估计风速具有更强的实用性。
