基于动态参数滤波的微电网逆变器负序功率分配策略
2021-12-30王光楠文传博
王光楠,文传博
(上海电机学院电气学院,上海201306)
微电网因清洁节能、电能传输损耗小、构造简单等优点而得到广泛应用[1]。通常情况下,微电网连接在大电力系统中,通过线路向负荷传输电能。当故障发生时,静态开关切断,微电网由并网运行转至孤岛运行模式。网络中各并联逆变器需要时刻调整电压及频率,以维持系统正常、安全、可靠运行[2-3]。
下垂控制因无需通信、自治度高,被广泛应用于逆变器的控制。但由于线路阻抗不同的原因导致各逆变器单元输出功率不能得到合理分配,因此,需对下垂控制进行改进[4-5]。文献[6]提出了基于逐次逼近的自适应虚拟阻抗方法,通过在下垂控制与改进控制策略间设置开关来回切换,最终使逆变器输出无功功率得到合理分配,但调节时间较长,在实际工程中难以应用。文献[7]通过交流小信号注入的方法解决了现有控制策略的弊端及功率分配问题,但交流信号提取的精度会受到系统中谐波的影响。文献[8]利用功率耦合控制策略,实现了逆变器输出有功、无功功率的合理分配,但未考虑负荷突变引起的系统电压、频率波动问题。文献[9-10]改进了有功功率控制环,提升了系统的动态性能,但未对无功功率控制环进行分析,且无功功率控制环的改进策略可能会影响功率调节的速度。
以上文献仅针对负载三相平衡的运行工况进行分析与改进,而系统实际运行中存在大量的不平衡负荷,使流过线路的电流出现负序分量。因此,如何对负序功率、电流进行合理分配成为一个研究热点。文献[11]将小信号注入法运用到不平衡及非线性负荷工况中,提高了负序及谐波功率的分配精度,其弊端与文献[7]相同。文献[12]利用功率耦合的方法,实现了负序功率的合理分配,但未考虑系统的频率扰动问题。文献[13]利用自适应虚拟电阻控制策略,减小了负序功率的分配误差,但虚拟电阻会带来系统额外的电压降落。文献[14]设计了负序的虚拟阻抗,减小了各线路阻抗差异,提高了负序电流的均分精度,但虚拟阻抗的设计需要线路阻抗信息,在实际工程应用中很难实现。
针对负序功率的分配问题,本文提出了以动态参数滤波为基础的功率耦合控制策略(以下简称改进控制策略)。首先,构造正序有功功率的自适应虚拟阻抗,并负序功率信息注入频率控制环中,稳态时实现负序功率的合理分配;其次,考虑到负序功率注入对系统频率质量的影响,本文通过动态参数滤波对控制策略进行进一步改进,提高了系统频率的质量,并加快了负序功率的调节速度;最后,通过Simulink仿真实验验证了该改进控制策略的可行性和有效性。
1 功率分配原则
微电网结构如图1所示,各直流电源通过逆变器、LC滤波电路、输电线路,向公共母线上的负荷提供电能,本地控制器实时采集逆变器输出量,实现逆变器的反馈闭环控制,增强系统运行的稳定性。图中,iL1、uC1与iLn、uCn分别为第1个逆变器与第n个逆变器所对应的电感电流与电容电压。

图1 微电网结构
1.1 三相平衡负荷的功率分配原则
微电网等效电路如图2所示。图中,Ui(i=1,2)为逆变器输出电压的幅值;φi(i=1,2)为逆变器输出电压的相位;U0为母线电压(设其电位为参考电位);Z1、Z2分别为逆变器1、逆变器2所对应的线路阻抗;Zload为负载阻抗。由于三相对称电压作用于三相对称负荷,故系统中只有正序分量的存在。

图2 微电网等效电路
由图2可得逆变器输出有功、无功功率(以阻抗呈现感性为例)分别为

式中:Xi(i=1,2)为馈线感抗。
由于φi与Pi、Ui与Qi呈正相关关系,而下垂控制的本质为反向调节逆变器输出功率,使系统形成负反馈调节机制,因此下垂控制可表示为

式中:fi为系统频率;f*、U*分别为额定频率与额定电压;mi、ni分别为各逆变器所对应的有功、无功功率的下垂系数;i=1,2。
由于系统频率为全局变量,逆变器输出电压为局部变量,根据式(2),有

1.2 负序功率分配原则
负序等效电路如图3所示。图中,不平衡负荷被等效为电流源向系统注入负序电流Ineg,Zneg1、Zneg2分别为逆变器1、逆变器2所对应的负序阻抗。
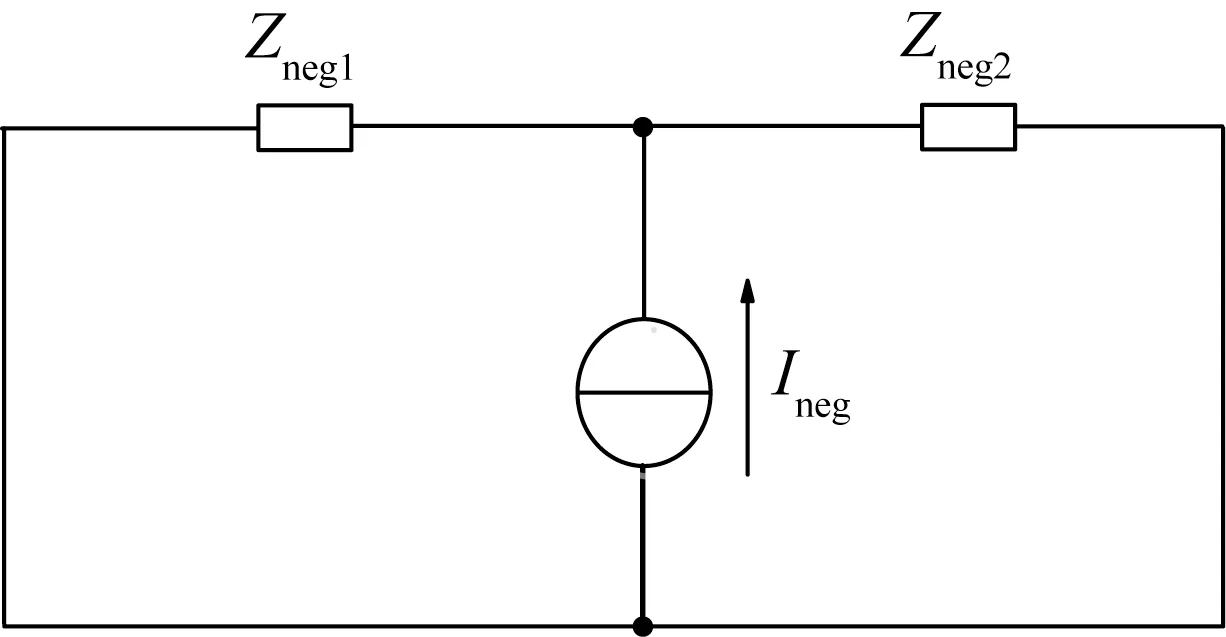
图3 负序等效电路
由于三相三线制系统中无中性点接地,零序阻抗较大,零序电流可忽略不计,故对不平衡负荷系统的零序等值电路不予考虑。当逆变器单元所对应的负序阻抗相同时,负序电流、功率可以得到合理分配。
对带有不平衡负荷的三相系统,其有效视在功率为

式中:Ue、Ie分别为电压、电流的均方根值与分别为基波电压、电流的正、负序分量。
式(5)中,第1项为逆变器输出的正序功率,其余3项之和为负序功率,但由于负序等效电路中的值很小,可忽略不计,则负序功率为

由此可知,实际系统中由于存在不平衡负荷,导致系统中出现负序功率和电流,因此构建控制回路需分别进行正、负序分量的控制。
2 电压、电流信号提取方法
计算负序功率应当先精确提取电压、电流的基波分量,然后计算电压、电流的正、负序分量。本文通过广义二阶积分器及正、负序计算模块,实现电压、电流的正、负序分量提取,广义二阶积分器如图4所示(以电流为例,电压提取过程与其相同)[11]。图中,iα、iβ分别为逆变器输出电流的α、β分量;kd为带宽系数;ω为角频率;1/s为积分系数;为基频下逆变器输出电流的α、β分量;为的正交分量。

图4 广义二阶积分器

由式(7)可知,广义二阶积分器相当于带通滤波器,只允许带有特定频率的信号通过,其对数幅频特性曲线如图5所示。

图5 对数幅频特性曲线
由图5可知,基频信号在基频处幅值为1,相位为0,广义二阶积分器可精确提取所需信号且无时延,考虑到系统动态响应与谐波的影响,取kd为
各频率信号提取完成后,通过正、负序计算模块得到电流的正、负序分量,实现不平衡功率的计算,电流正、负序分量计算模块如图6所示。图中,分别为基波电流在α、β坐标系下的正、负序分量。
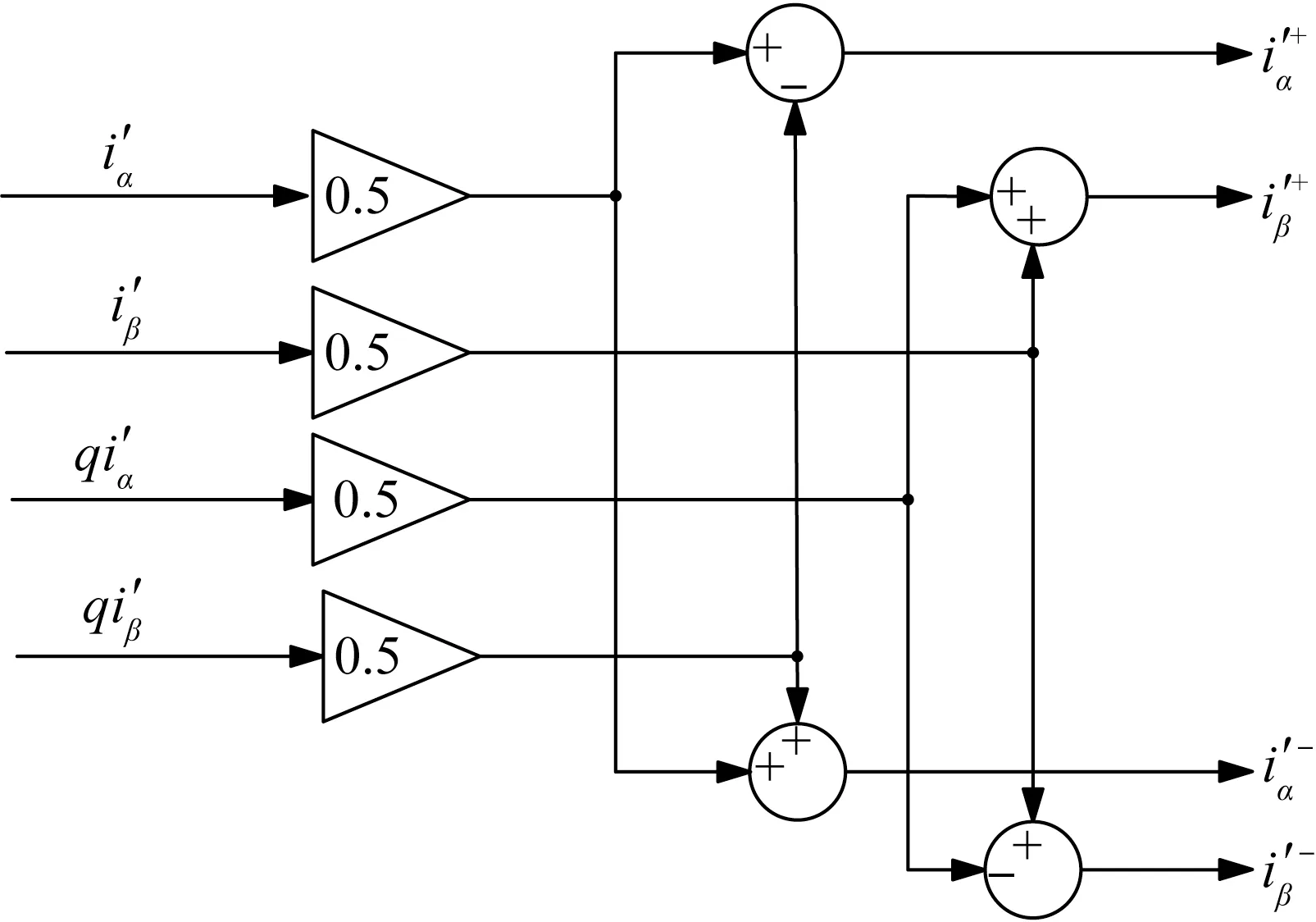
图6 电流正、负序分量计算模块
3 改进控制策略
改进控制策略控制框图如图7所示。图中,uαβ、uαβ'+为逆变器输出电压的α、β分量、逆变器输出正序基波电压的α、β分量;P+、Q+为正序有功、无功功率;ωs为低通滤波器截止频率;ud、uq为下垂控制参考电压;Δud、Δuq为虚拟阻抗压降;udref、uqref为电压控制环的输入信号;Qneg为负序功率。
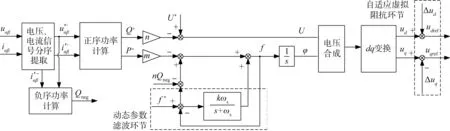
图7 改进控制策略控制框图
采集逆变器输出电压、电流,提取正、负序电压、电流,同时计算正序有功、无功功率、负序功率;将正序有功、无功功率用于下垂控制,利用动态参数滤波、自适应虚拟阻抗,分别对频率、电压控制环进行改进,得出改进后的电压向量;将电压向量用于产生逆变器开关管的驱动信号。动态参数滤波、自适应虚拟阻抗可表示为
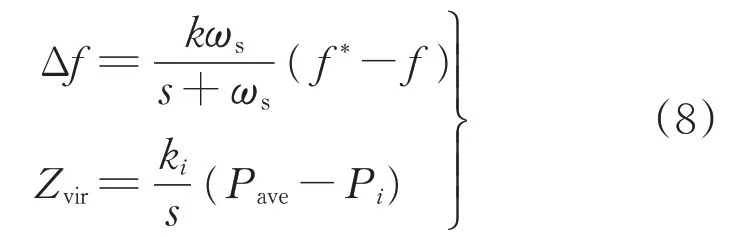
式中:Pave为参考有功功率;k为低通滤波系数,其表达式为斜坡函数;ki(i=1,2)为积分函数。
3.1 负序功率原理
改进控制策略可表示为
式中:i=1,2;G为软补偿系数,具体设置参见文献[15]。
改进控制策略主要分为以下两个过程:
(1)通信预备过程。主要由微电网中央控制器与逆变器的本地控制器完成此项工作。在该过程中,逆变器的本地控制器实时采集逆变器输出有功功率,并发送给微电网中央控制器,计算有功功率的参考值,同时微电网中央控制器肩负着发起启动信号的功能,当改进控制过程启动时,即为各逆变器提供补偿信号与Pave值(此时Pave值为微电网中央控制器实时计算的最新值)。上述过程将在下垂控制中完成,为改进控制策略作准备。
(2)当各逆变器的本地控制器接收到补偿信号时,各逆变器控制部分同时动作,即对各逆变器的频率控制环、电压控制环分别增添负序功率扰动量与自适应虚拟阻抗,稳态时各逆变器的负序功率缺额将得到补偿。
根据式(9),补偿信号产生后,对于频率控制环,有

对于电压控制环,由于虚拟阻抗的作用,有

将式(10)、式(11)合并,则有

从虚拟阻抗的自适应调节过程进行分析。假设最初系统运行在下垂控制模式,如式(2)所示。若逆变器1的线路阻抗小于逆变器2的线路阻抗,负序功率满足

某一时刻,改进控制策略实施时,结合式(10)、式(13),以等额定容量逆变器并联系统为例,有

由于虚拟阻抗的自适应调整,使得P+1增大,减小,最终满足

结合式(9)中虚拟阻抗表达式可知,线路1阻抗变大,线路2阻抗变小,最终趋于相同,即满足

负序功率可以得到合理分配。
3.2 动态参数滤波调节过程
上一节利用自适应虚拟阻抗与负序功率的扰动量实现了负序功率的合理分配,但加入扰动量使系统频率发生波动,影响系统稳定性,应做出合理调控。
改进控制策略如式(9)中第1个表达式所示,将其化简可得

可知,正序有功功率、负序功率均对系统的频率造成波动。定义Δfa为系统频率偏移量,则有
可继续变换为
式中:ωp为瞬时正序有功功率、瞬时负序功率qnegi的低通滤波截止频率。
动态参数滤波的加入给系统增添了一个额外的闭环极点。结合文献[9]可知,k值增大可使系统频率逼近额定值,但增大的同时使系统的动态调节性能变弱。因此,对k值合理调控是必要的。由于自适应虚拟阻抗与有功功率有关,且通过调节自适应虚拟阻抗系数可调控有功功率均分的速度,故k值主要对负序功率的调节速率影响较大。
通过上述分析可知,频率偏移的大小与负序功率的调节速率是一对矛盾,而本文目标是在实现频率偏移量小的同时,加快负序功率的调节速率,因此需合理设计k值。
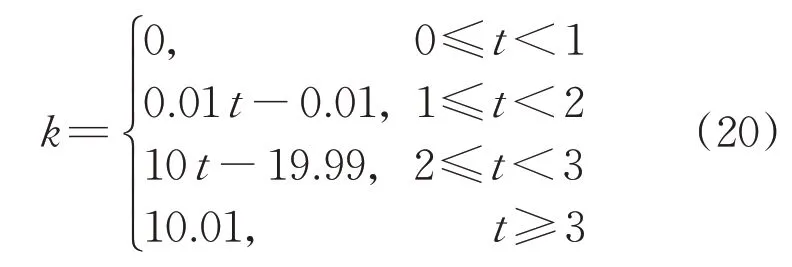
本文通过分段函数设置k值。第1阶段:即负序功率调节阶段,主要目标为负序功率的快速调节,对频率抑制并没有过高的要求,k值的表达式为斜率较小的一次函数;第2阶段:主要追求频率的偏移抑制,对负序功率的调节速率没有过高的要求,因为负序功率的调节过程已在第1阶段基本完成;第3阶段:对第2阶段末的k值进行保持。k值函数示意图如图8所示。

图8 k值函数示意图
t1∼t2为调节速率阶段,t2∼t3为频率偏移抑制阶段。本文设置
4 仿真分析
搭建如图1所示的微电网结构模型,参数设置如表1所示。

表1 参数设置
算例1 传统下垂控制。传统下垂控制中,系统频率为全局变量,逆变器输出有功功率可得到合理分配,如图9(a)所示。各逆变器所对应的阻抗不同,导致流经线路的负序功率不能得到合理分配,如图9(b)所示。
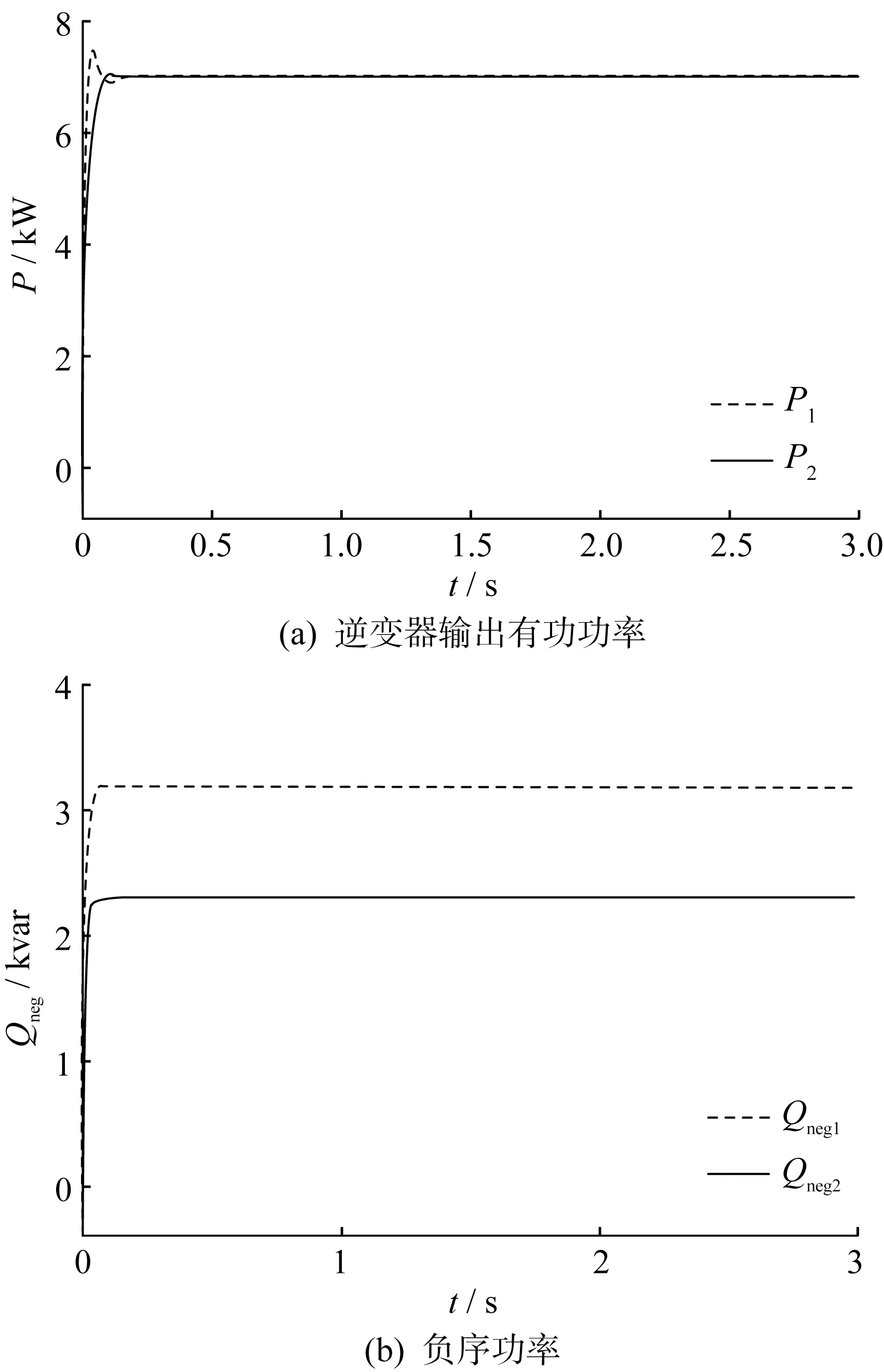
图9 下垂控制
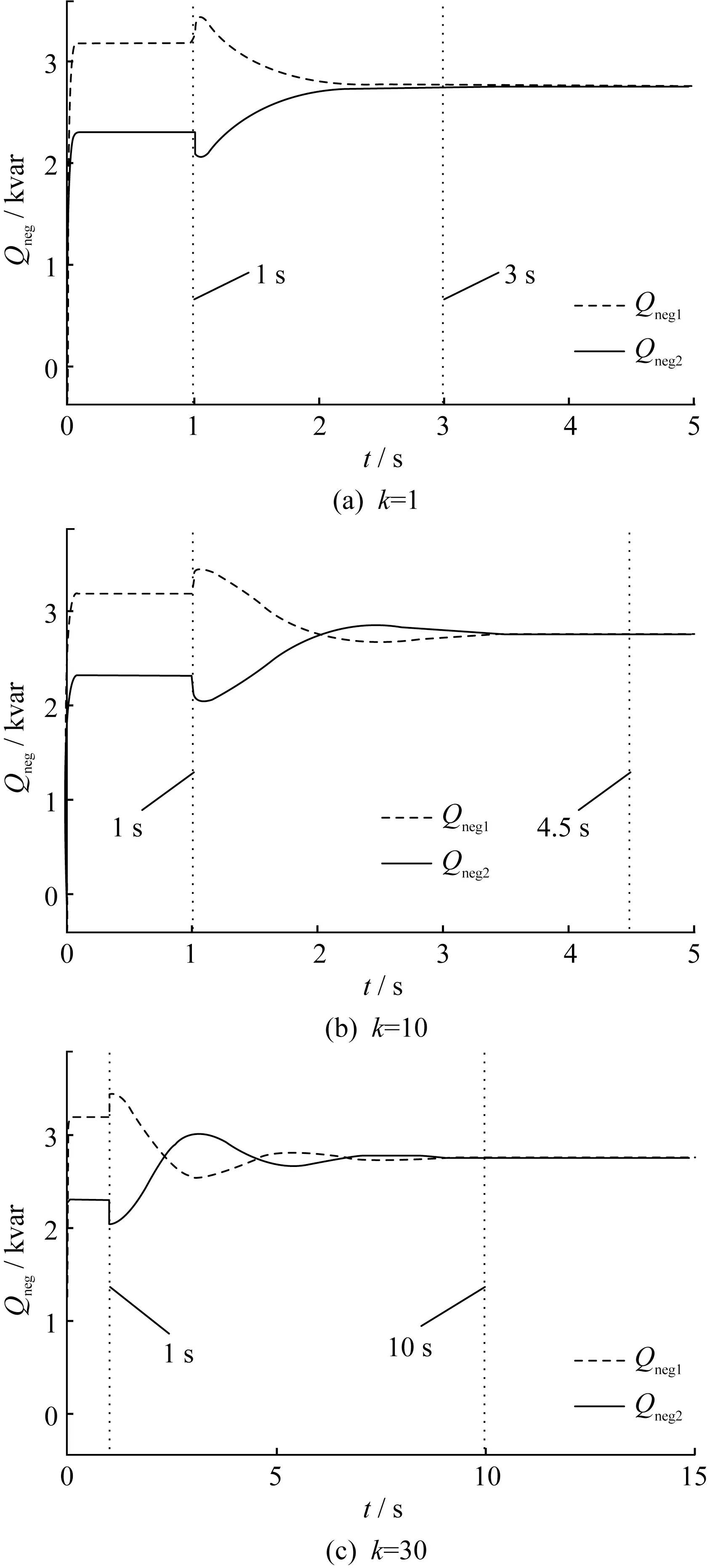
算例2 改进控制策略。改进控制策略的仿真实验结果如图10所示。0~1 s为传统下垂控制,1 s开始启动改进控制策略。1 s之前的过程,仿真算例1已说明。由式(13)可知,补偿瞬间,由于Qneg1>Qneg2,且两逆变器单元均满足式(10),因此,有P+1 图10 改进控制策略仿真实验 算例3 负序功率动态性能比较。本算例的仿真设置过程与算例2相同。由3.2节可知,k值的设置对负序功率的调节速率有较大影响,本文通过一组对比实验验证3.2节的理论。 图11为k=1、10、30的负序功率调节速率图。当k=1时,负序功率调节时间为2 s;当k=10时,负序功率调节时间为3.5 s;当k=30时,负序功率调节时间为9 s。通过对比可知,k值越大,负序功率的调节速率越慢,证明了本文3.2节的理论。 图11 负序功率调节速率比较 本文着重剖析了负序功率不能得到合理分配的原因,并以此为主线,提出了改进控制策略,解决了负序功率分配精度、频率偏移、功率调节速率3个问题。具有优化如下: (1)通过自适应虚拟阻抗与负序功率扰动的方法,大大提高了负序功率合理分配的精度。 (2)针对频率下垂控制本身的特性以及负序功率对系统频率的扰动,权衡了频率偏移与负序功率调节速率之间的矛盾。通过对k值的合理取值,在提高频率质量的同时,也加快了负序功率的调节速率。 (3)改进控制策略也可应用于阻性下垂控制。 综上所述,本文改进控制策略适用于逆变器并联系统的负序功率、系统频率的精确控制,并经仿真实验证明了其有效性。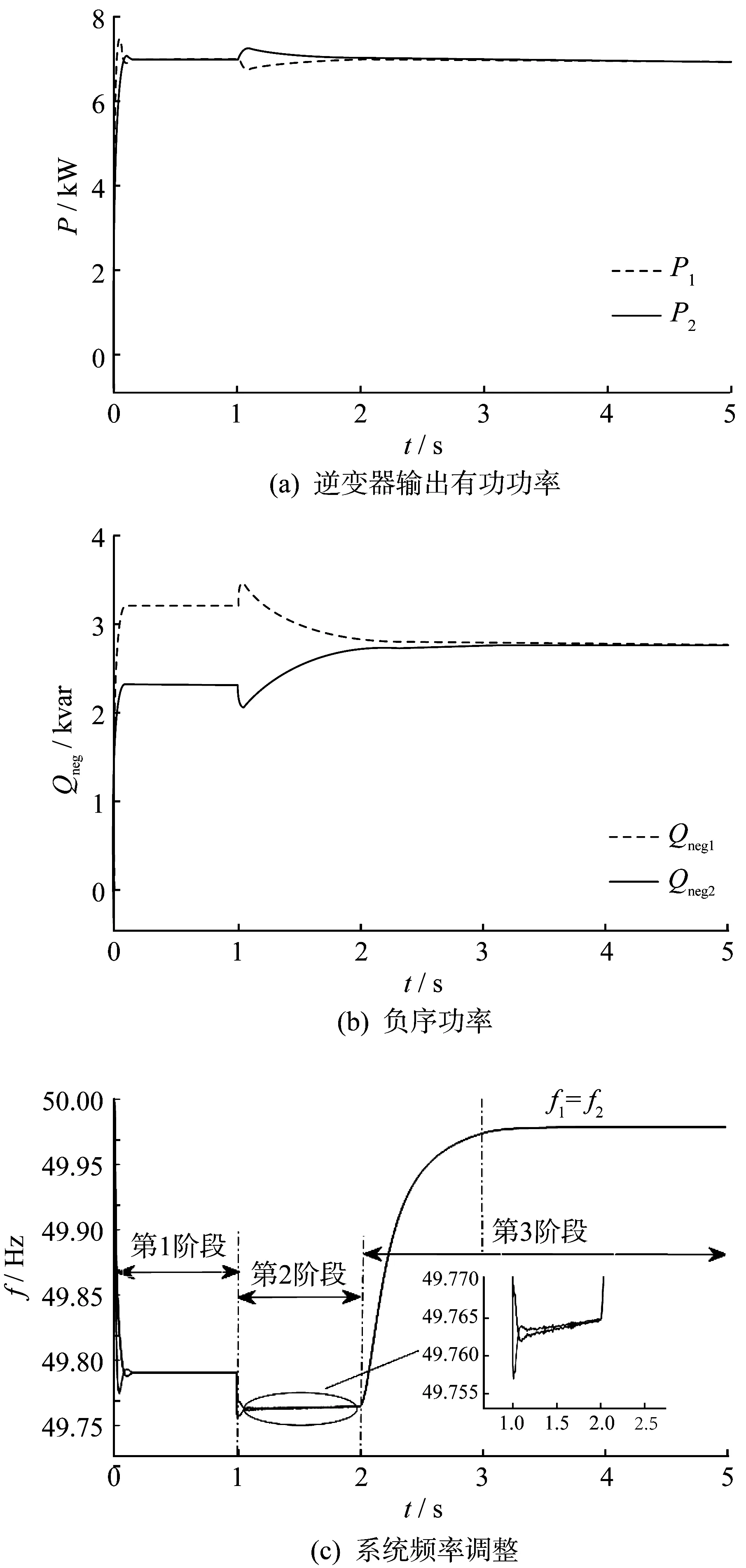
5 结 论
