一种基于MMC拓扑的高压电容器充电电源设计
2021-12-20张辰丰栗保明
张辰丰,栗保明
(南京理工大学 瞬态物理国家重点实验室,江苏 南京 210094)
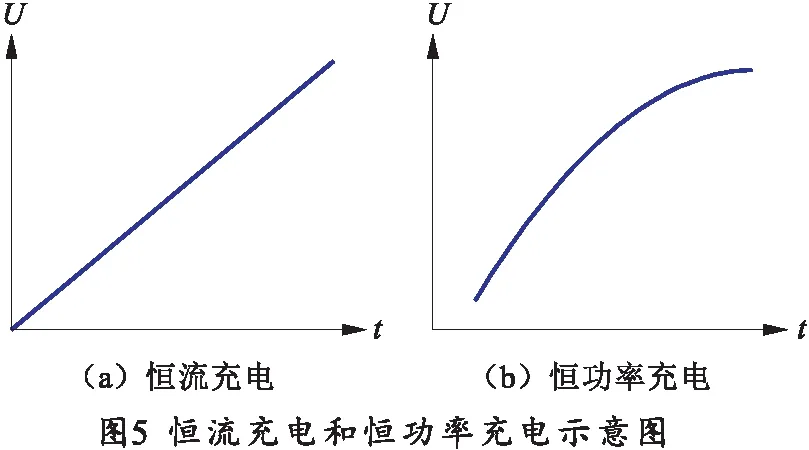
脉冲功率源是电磁发射过程的关键组成部分与能量来源,其主要储能器件为大容量高压电容器。电磁发射的连发设计要求脉冲功率源在短时间内连续放电。要实现这一功能,首先需要实现高压电容器能量的快速、有效补充,即快速可重复充电技术。因此,选取合适的方案来研发适用于高电压场景下的电容器充电电源就显得尤为重要[1]。与一般形式的直流电源不同,这一类充电电源的负载一般是一个电容值较大、额定电压较高的电容器。充电电源的工作过程即为在外部电路使得电容器放电之后,从其电压为0 V的状态开始,对其进行充电使得其电压达到额定电压的过程,负载两端的电压值变化的范围比较大,这就要求充电电源在相对宽的负载范围内,具有较好的电路特性[2]。为了进行充电过程中的控制,通常选取充电电流或者充电功率为控制量。前者即恒流充电过程,即在充电阶段保持充电电流为一恒定或者接近恒定的值,单位时间内负载吸收的电荷量相同,电压线性上升,一般用于充电过程前期电压相对较低的阶段[3];后者即恒功率充电过程,即在充电阶段保持充电功率为一恒定或者接近恒定的值,电压上升速度逐渐减缓,一般用于充电电压较高的阶段。
1 级联式MMC结构及工作原理
模块化多电平换流器(Modular Multilevel Converter,MMC)的拓扑结构最早是由德国联邦国防军大学的R. Marquardt和A. Lesnicar基于半桥子模块(Half Bridge Sub-Module, HBSM)结构,于2001年提出的[4]。这一电路拓扑由于其模块化设计,低损耗,低谐波含量等相关优势,得到了学术界和工程界的广泛关注。
对于多个电容器组而言,制造过程中存在参数差异,长期在不同工况下运行、充放电速率差异等因素会导致不同的电源模块在运行过程中出现荷电状态(State of Charge,SOC)不一致的情况。然而,在高电压电容储能充电电源中,任何一个电源模组出现过充或者过放现象都会给整个电路、设备乃至其他相关设备带来灾难性的后果。因此,考虑在高电压电容器充电电源中选用MMC这一电路结构,利用其良好的动态均压性能来解决连续放电过程中存在的动态均压问题;同时,由于这一结构采用模块化设计,存在充足的热备份投入在电路中,因此,单个子模块因故障失效时,可以迅速执行相关模块的切除操作,将其对其余部分的影响降至最低。基于级联式模块化多电平双向直流换流器的超级电容储能输出系统如图1所示。

图1电路由多个结构相同的半桥子模块级联而成。半桥子模块的基本结构如图2所示。每个子模块由两个IGBT和两个与其反并联的二极管组成。uSM为子模块的输出电压,iSM为流入子模块的电流,由IGBT和二极管的导通条件可知,稳态运行时子模块在电路桥臂上的投切仅由两个可控IGBT器件决定[5]。在不考虑死区时间影响的情况下,模组仅存在投入和切出两种状态。因此,在任意周期内,电路中单个模块输出的电压uSMj可表示为
uSMj=uCjdj,
(1)
式中:uCj表示j模块电容器两端的电压;dj为该模块的占空比[6]。
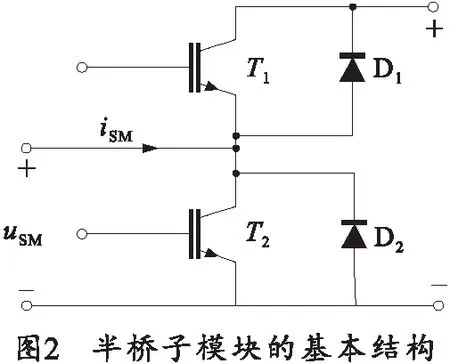
图1中,每个子模块中含有一个性能参数完全相同的超级电容器(C21,C22,…,C2n),用于离线储能;L为电路系统中的滤波电感,C11为MMC电路与高压侧之间的滤波电容。这一电路拓扑中,开关器件具有较小的电压应力,因此,在高电压电容器充电电源设计中,使用这一拓扑可以有效降低开关元件需要的耐压等级,以降低设计成本,减少设备超过额定电压导致元器件失效的概率。
在稳态情况下,这一MMC拓扑的输出电压uout可由全部子模块的输出电压之和来表示,即
uout=∑uSMj=∑uCjdj.
(2)
由式(2)和电路原理有
(3)
式中,Req表示电感及其他线路的等效电阻[7]。
2 PWM与控制电路的设计和仿真
对于采用电容器充电的MMC结构,可以使用移相控制策略,即通过PWM控制器来控制每个子模块的开通和关断,调节其占空比,达到调整总体输出电压的目的[8]。
2.1 PWM电路设计与仿真
对于具有n个半桥子模块的电路拓扑而言,相邻子模块载波之间的移相角φ可以表示为
(4)
因此,控制系统的PWM部分设计如图3所示。

PWM部分的输入为调制波,通过比较器与载波进行比较,若调制波电平高于载波即输出高电平,控制子模块开通,否则输出低电平控制子模块断开。载波为一定周期的三角波经时延处理后得到的信号,三角波的周期由PWM频率决定,时延处理即依据式(4)的要求,对于第j个模块,其时延量即为jT/n。由此得到的MMC的载波信号、调制波信号和各子模块的控制信号关系如图4所示。PWM输出信号电平为高电平时,对应的子模块处于接入状态,此时半桥子模块的上桥臂开通,下桥臂关断;为低电平时,对应子模块处于切出状态,此时半桥子模块下桥臂开通,上桥臂关断。因此实际控制过程中,上桥臂的IGBT的控制信号即为PWM调制的输出信号,下桥臂的控制信号与之恰好反向,由此进行对MMC电路中各半桥子模块的控制。

2.2 控制部分设计
控制部分的主要功能是给PWM电路提供输入的调制波。在电容器充电电源设计的过程中主要包括恒流充电阶段、恒功率充电阶段和电压保持阶段3个部分。恒流充电和恒功率充电过程的示意图如图5所示。
2.2.1 恒流阶段
恒流阶段一般用于电容器电压较低的情况,即充电的第1阶段,根据实际需求,笔者设计的充电电源的恒流阶段是在电容器电压达到其额定电压的70%之前的过程。恒流阶段的被控量即为流向电容器的电流大小,通过PI控制的方式使得电容器的充电电流稳定在设定值附近。实现过程中选用了电流环的控制方式,其控制结构的框图如图6所示。

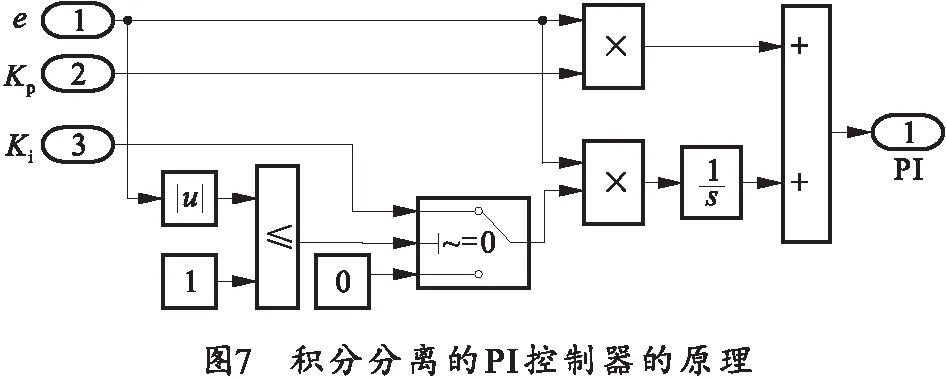
这一过程中首先对电容器的充电电流进行取样,然后将取样结果与电流的参考值Iref进行比较,比较结果送入电流环的PI控制器。为了减小出现的电流超调量,使用了一种积分分离形式的PI控制器[9],其原理如图7所示。在输入PI控制器的偏离量大于一定值时,不启用积分环节,仅通过比例控制进行调节;在偏离量小于该值时恢复积分环节,即与传统的PI控制器相同,这样设计响应速度会稍慢于传统的PI控制,但是超调量得到了有效抑制。
2.2.2 恒功率阶段
在电容器电压达到一个较为接近其额定电压的状态下,如果继续使用恒流充电的方式进行充电,单位时间内充入电容器的电荷量较大,因此需考虑降低充电电流来确保充电过程的安全。
笔者设计的充电电源的恒功率阶段自电容器电压达到额定电压的70%开始至达到额定电压结束。恒功率阶段的被控量为给电容器充电的视在功率的值,通过改进的PI控制方式使得其视在功率始终保持在恒流阶段开始时的值,采用功率环的控制方式,结构与恒流充电部分类似,仅被控量调整为视在功率。这一过程中需要对电容器两端电压和充电电流分别进行取样,通过乘法运算器计算其实时的视在功率并与设计值比较,比较结果送至上节提到的积分分离式PI控制器。
2.2.3 动态均压部分
动态均压控制部分用于在模块电容器发生老化(一般指电容值在一定范围内下降)的情况下,对于模块电容值不同的模块之间通过调整充电过程中模块出力比例以达到电容器电压均衡的目的,用以防止过放电导致的电容失效的问题[10]。
动态均压部分主要包括模块SOC在线估计和调整模块出力两部分。其中,模块的SOC,记为S,可以表示为
(5)
式中:Ere为基于实际测得的电压计算得到的电容器储存的能量;Eth为基于电容器的额定电压计算得到的电容器储存的能量。电容器储存的能量可以表示为
(6)
在线估计得到的模块SOC值可以用在2.1节中提到的PWM电路的调制波上,调制波可以由2.2.1和2.2.2节中提到的PI控制器的输出与在线估计得到的对应模块SOC值经乘法运算得到。通过这种方式,可以实现高SOC模块在放电过程中以一个相对更高的占空比进行放电,提高其出力比例以加快其SOC下降速率;低SOC模块放电过程中占空比相对更低,以一个更低的占空比放电,降低SOC下降速率,从而实现模块间SOC和电压均衡,体现出MMC拓扑动态均压的效果。
2.2.4 电压保持阶段
电压保持阶段,又称浮充阶段。在电容器两端电压已达到其额定电压后,由于电容器介质极化等问题,会导致电容器两端的电压下降,产生电压损失[11]。为了保证充电后电容器电压始终位于其额定值,充电完成后并不直接断开充电电源,而是保持电源与电容器的连接,同时对电容器两端电压进行取样,当电压下降达到指定值(如下降1%)时,再次启动充电电源,使其对电容器再次充电直至电容器电压再次达到额定值,以保证电容器电压始终维持在额定值附近。
2.2.5 电路保护
由于笔者设计的充电电源运行在高电压、大电流工况下,因此可能会出现因电压、漏电流过大等问题导致的设备损毁甚至人员伤亡等严重问题。为了防止在充电电源运行过程中出现由于元器件故障或者外部故障导致的过电压或者漏电流过大的问题,需要通过控制系统方面的调整来防止出现相关问题。可以在电路中加设过电压和漏电流检测部分,当检测到出现过电压或者漏电流过大问题时,直接将所有PWM模块输出的控制信号置零以达到断开充电电源的目的。
3 仿真与结果分析
3.1 单次充电的仿真结果
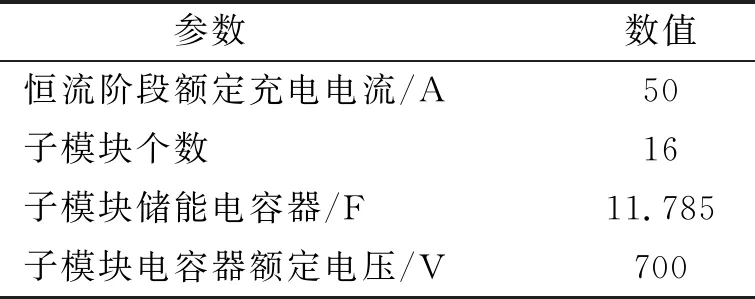
基于上述分析和设计过程,在Simulink中搭建了充电电源的原理模型,所用试验参数如表1所示。

表1 仿真所用的试验参数
续表1
使用上述数据进行仿真计算,得到的电容器单次充电电压波形如图8所示。

由图8可以看出充电过程的两个不同阶段,在充电电压达到7 kV之前,充电电源对电容器恒流充电,电容器两端电压接近线性增长;此后由于切换至恒功率充电,电压上升速度逐渐减缓,并在充电达到要求值10 kV后充电电源停止工作,充电完成。充电电流波形如图9所示。
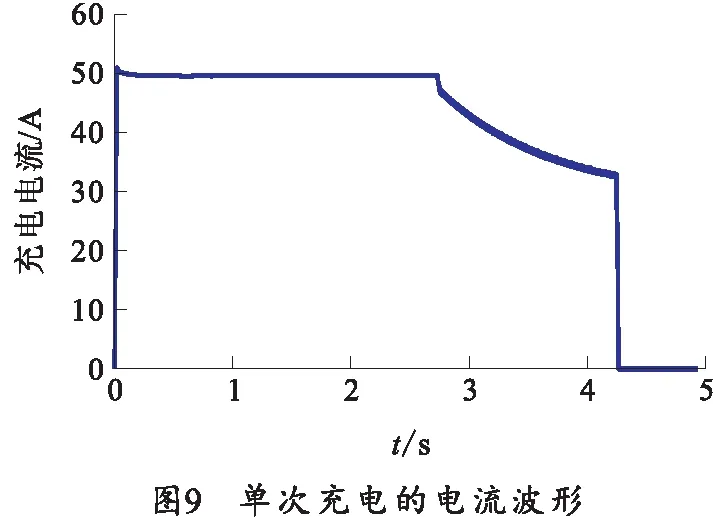
由图9可以看出,在恒流充电阶段,充电电流始终保持在50 A的设定值附近,较好地实现了设计目的;在恒功率充电阶段,充电电流逐渐下降至33 A左右,此时充电达到要求值,充电电源停止工作。
上述仿真计算得到的波形和数据是基于子模块电容器参数均匀分布得到的。对于实际充电电源来说,还需要额外考虑电容和元器件损耗系数的问题。
3.2 动态均压部分的仿真结果
对于电容器损耗的情况,按照文献[12-13]中提出的电容器子模块衰减比例进行了部分子模块出现容量衰减情况的仿真计算,仿真使用的模块电容参数如表2所示,得到的各模块电压极差与电容器最大电压降的比值随时间变化曲线如图10所示。
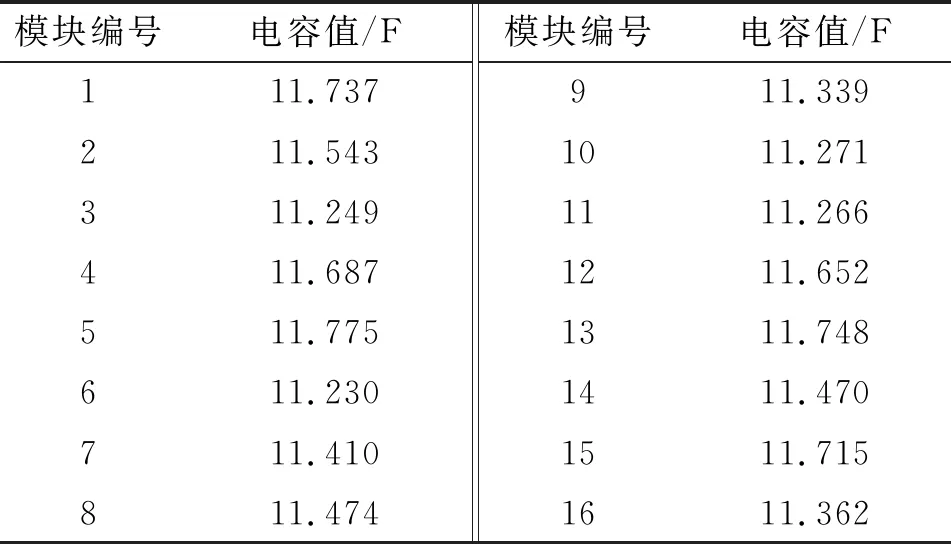
表2 电容器损耗情况下的仿真计算参数

由图10可知,单次充电过程中,刚开始充电时模块电容器电压极差很接近于最大压降,说明此阶段电容器出力水平并不均衡。随着充电过程的进行,模块电容器电压极差与最大电压降之比降至0.1以内,体现出MMC电路良好的动态均压特性。
3.3 电压保持部分的仿真结果
对电压保持部分电路,通过Simulink进行仿真分析,得到的电容器两端电压波形如图11所示。

0 s时电容器两端电压为10 kV,此时充电电源断开,电容器两端电压开始下降;当电压降至损失超过1%(9.9 kV以下)时,充电电源就再次开始工作给电容器浮充,使得其电压始终保持在一个相对稳定的范围内。
4 结束语
笔者基于级联式MMC电路拓扑,对用于电磁发射过程中的脉冲功率源高压电容器的充电电源进行了原理设计,通过仿真计算得到了充电过程中的充电电压和电流波形;并针对高压电容器常出现的电压损失现象,给充电电源增加了浮充部分。电路仿真得到的波形和设计预期与发射需求相符。由于没有进行实际的电路模型搭建,后续仍需要进行进一步的元件选型、设计和试验,通过后续的试验结果对笔者设计进行检测和验证。另外,笔者对于充电时电流和功率控制的方法仍是基于传统的PID控制方法,下一步的研究过程中将加入部分智能化的算法,力求使得电路控制更为智能化、简便化,为电磁发射过程实现更为稳定的电源保障功能。
