一种共轴双旋翼式火星飞行器设计及其试验验证
2021-12-13朱凯杰唐徳威沈文清吕艺轩赵鹏越邓慧超全齐全孟林智邓宗全
朱凯杰,唐徳威,沈文清,吕艺轩,赵鹏越,邓慧超,全齐全,孟林智,王 彤,邓宗全
(1. 哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001;2. 北京航空航天大学机械工程及自动化学院,北京 100191;3. 北京空间飞行器总体设计部,北京 100094)
0 引 言
火星具有与地球类似的物理特性和地理特征,在资源开发与人类生存空间拓展方面独具潜能,因而成为深空探测的重要对象[1-2]。截至目前,各国已开展了45次火星探测,主要探测途径包括飞掠、环绕和着陆巡视等[3]。火星表面存在稀薄的低空大气[4],这为火星飞行器巡视探测提供了可能[5]。
火星飞行器探测设想于二十世纪70年代被提出,此后各研究机构纷纷开展飞行器的概念设计,已提出包括固定翼式[6]、滑翔机[7]、扑翼式[8]和旋翼式[9]在内的多种构型。其中,旋翼式飞行器结构紧凑、可重复垂直起降且带载能力强,成为火星探测较为理想的构型[10]。此外,旋翼式火星飞行器具有以下突出优势:1)可在漫游车无法驶入的洞穴、崖壁等危险区域进行悬停拍摄和采样返回;2)具备较强机动性,可拓展探测范围并加快巡视速度;3)可构建星表三维地形图像以辅助漫游车规划探测路径[11]。
火星低空大气主要成分为二氧化碳及少量氩气和氦气[12],平均大气密度仅为地球大气的1.29%,这导致工作在低雷诺数流场中的飞行器桨叶表面产生层流分离,进而降低旋翼气动效率[13]。“海盗号”着陆区附近星表平均温度变化范围为-120~-60 ℃[14]。低温导致桨叶周围马赫数升高,并引起桨尖空气压缩与激波震荡。此外,火星表面存在的火星风、复杂气旋和尘暴环境也对火星飞行器的抗干扰能力和增稳飞行控制提出了挑战[15]。
斯坦福大学Kroo等在2000年研制了一款微型四旋翼火星无人机Mesicopter[16],由于其控制系统不完善且带载能力极低而未获得实际应用。美国NASA于2002年开展了旋翼式火星飞行器MARTA的概念设计,并研制了两代样机TAMS与TAMS-II验证其飞行原理、控制技术和采样方案[17]。马里兰大学的Datta等与佐治亚理工大学的O’Brien于2003年分别设计了共轴双旋翼与四旋翼两种构型的火星飞行器[18-19],但均停留在概念建模与参数设计阶段。萨里大学的学者从2004年至2017年研制了四代固定翼-旋翼复合式火星飞行器,利用多传感器融合实现状态估计,通过调节旋翼转速与副翼角度实现飞行控制[20-23]。日本东北大学的Aoki等针对JAXA的火星表面坑洞探测计划设计了一种共轴旋翼式火星飞行器[24],并结合数值模拟与实验方法优化了旋翼桨叶参数。美国喷气推进实验室针对NASA的“Mars 2020”探测计划研制了“机智号”火星直升机以辅助“毅力号”漫游车探测[25],并采取优化翼型、提高转速和增加桨叶展长等措施设计了带载能力更强的火星科学直升机[26]。火星直升机通过一对反向旋转的共轴旋翼产生垂直动力,利用斜盘机构实现调姿,具备导航、控制和制导功能[27]。哈尔滨工业大学的全齐全等设计了一种适用于火星旋翼无人机的桨叶翼型,并通过实验验证了其在火星大气下的带载能力和续航性能[28]。南京航空航天大学的李臣亮等提出了一种鲁棒自适应调参方法,可控制火星无人机在不同高度和速度下稳定飞行[29]。
目前,国内外关于旋翼式火星飞行器的相关研究仍处于起步阶段。除美国NASA研制了可执行探测任务的火星直升机外,大多数研究机构仅停留在飞行原理验证和低雷诺数桨叶气动特性研究阶段。本文考虑火星特殊大气环境对旋翼气动特性的影响,优选了一种可在低雷诺数条件下产生高升阻比的桨叶翼型,基于叶素动量理论和旋翼间气动干扰理论,提出了一种旋翼桨叶气动特性预测方法,选择了桨叶平面形状与扭转角等结构参数和旋翼转速与安装角等飞行参数,设计了一种共轴双旋翼式火星飞行器,构建了地面模拟试验装置,验证了飞行器在模拟火星环境中的带载悬停飞行能力。
1 共轴双旋翼式火星飞行器设计
1.1 旋翼桨叶结构设计
火星低密度大气环境导致飞行器旋翼桨叶工作雷诺数范围为103~104,即处于亚临界雷诺数状态。该状态下的旋翼桨叶表面层流未过渡到湍流而直接发生分离引起流动附着区域减小,使桨叶所受阻力急剧增加;另一方面,边界层位移厚度增加会导致翼型有效弯度减小,进而使得桨叶产生升力减小[30]。
为获得较高的升阻比,火星飞行器桨叶翼型应具有以下特点[31]:1)厚度较小,以弱化湍流过渡相对压力梯度的滞后效应;2)弯度较大,通过减小来流与翼型上表面夹角减小气动阻力,并通过在翼型下表面的大弯度区域处生成湍流来增加升力;3)前缘半径较小,可使湍流过渡点前移,从而使前缘分离流在翼型下游二次附着。
利用计算流体力学数值模拟方法在NACA四位数翼型族中优选气动性能最佳的翼型。已有探测数据表明,流体连续性假设适用于火星大气流场,故选择流体控制方程为Navier-Stokes方程。考虑近壁面流体中剪切应力传播与远壁面流场模拟精度,选择湍流模型为剪切应力传输k-ω模型。考虑火星表面大气的可压缩性,设置流动入口与出口为压力远场边界条件。考虑桨叶加工工艺性,选择升阻比最佳的NACA 6904翼型[32],如图1所示。该翼型相对弯度为6%,最大弯度位置为90%,相对厚度为4%。

图1 NACA 6904翼型几何形状Fig.1 Geometry of NACA 6904 airfoil
前期实验研究表明平面形状为矩形的桨叶可产生足够升力[28],但其桨尖气动载荷会导致旋翼系统振动与噪声,且桨尖在高速旋转中会产生失速现象,故选择桨叶的平面形状为梯形,如图2所示。为保证飞行器在火星大气中的带载能力,选择旋翼桨盘直径为1 m。考虑到桨叶根部形状对产生升力的影响较小,故选择展长20%以内为根切过渡段,以使最大弦长能过渡到桨毂安装尺寸。桨叶最大弦长位于展长20%处,为100 mm;为了保持桨叶整体推力水平,选择桨尖弦长为40 mm。

图2 旋翼桨叶的平面形状Fig.2 Geometry of a twist-free rotor blade
桨叶根部至桨尖的总扭转角度为10度,且扭转沿展向线性分布,如图3所示。桨叶通过可手动更换的铝合金桨夹安装在桨毂上,实现安装角度的高精度调节。桨叶气动中心轴线通过桨夹安装孔,也是翼型扭转的旋转中心,这样可以避免附加的气动力矩对桨叶产生破坏。考虑到质量约束和刚度、强度要求,采用3D打印技术加工桨叶模具,利用碳纤维-环氧树脂层叠复合材料完成桨叶毛坯加工,固化后去除毛刺并进行二次机加,最后进行表面处理。

图3 火星飞行器旋翼桨叶Fig.3 A rotor blade of the Mars rotorcraft
1.2 旋翼气动特性数值模拟
定义旋翼入流比λi为桨盘诱导速度与合速度比值。当旋翼系统悬停时,将桨叶沿展向划分为叶素微元,可得无量纲展向位置r处叶素入流比λi(r)为:
(1)
式中:σ为旋翼实度,即桨叶面积与桨盘面积比值;θ为桨叶安装角;Cl为叶素升力系数,依据普朗特理论,可表述为:
(2)
式中:α为来流迎角;β为雷诺数影响指数;R为旋翼半径,500 mm;Mr为不同展长处叶素马赫数;Clα为翼型升力系数曲线随迎角变化的斜率。利用入流比λi计算叶素微元推力系数并沿展向积分得到桨叶推力系数和功率系数为:
(3)
式中:Cd,0为翼型零升阻力系数。基于空气动力学的动量理论计算单旋翼产生推力Ts及功率Ps为:
(4)
式中:ρ为火星大气密度,0.0166 kg/m3;A为旋翼桨盘面积;Ω为旋翼转速。由于下旋翼桨盘位于上旋翼滑流下游,其产生推力及气动效率会因此而显著降低,故共轴双旋翼的升力与功率均会低于两个单旋翼相加的总和。定义诱导功率因数κi为共轴双旋翼消耗功率与两个单旋翼消耗功率之和的比值。按Leishman等提出的共轴双旋翼间气动干扰理论[33],在上下旋翼转速相同且旋翼间距为旋翼直径的10%时,κi值约为0.78,此时推力比值约为0.85。
针对翼型为NACA 6904的矩形桨叶开展的气动特性测试试验表明[28],旋翼桨叶在根部安装角为30°时可获得最高气动效率,故选择桨叶根部安装角为30°。对旋翼周围流场划分非结构的滑移网格,并对外围流场划分结构网格,按火星大气条件设置数值模拟参数与边界条件,选择剪切应力传输k-ω模型模拟湍流。假设上旋翼气动特性未受下旋翼来流影响且两个旋翼转速相同,对共轴双旋翼系统产生推力及消耗功率进行数值模拟。
旋翼系统产生推力与消耗功率随转速变化曲线分别如图4和图5所示。旋翼产生推力随转速增加而增大,且推力增速也逐渐加快。当上下旋翼转速均为2140 r/min时,共轴旋翼系统可产生升力为7.35 N。考虑到火星重力加速度约为地球重力加速度的3/8,共轴旋翼系统可在火星环境下带载2.0 kg。

图4 火星大气下共轴双旋翼系统推力随转速变化Fig.4 Variation of the generated thrust with the rotational speed of the coaxial rotor system in the Martian atmosphere

图5 火星大气下共轴双旋翼系统功率随转速变化Fig.5 Variation of the required power with the rotational speed of the coaxial rotor system in the Martian atmosphere
旋翼消耗功率随转速增加而增大,且单位转速的消耗功率也逐渐增加。当两个旋翼转速为2140 r/min时,共轴双旋翼系统消耗功率为133 W。依据共轴双旋翼气动特性数值模拟结果,选择火星飞行器旋翼参数见表1。

表1 火星飞行器旋翼参数Table 1 Rotor parameters of Mars rotorcraft
1.3 样机结构与控制系统设计
在完成旋翼桨叶设计的基础上,设计了共轴双旋翼式火星飞行器样机“火星飞鸟-I”,其机械结构如图6所示。火星飞行器的主结构是一根中央安装管,其通过法兰接口与推进性能测试装置相连。“火星飞鸟-I”以两个并排布置的推进电机为动力输入,通过两对啮合的圆柱齿轮将运动和动力分别传递至上、下旋翼传动轴,进而利用桨毂和桨夹驱动两个共轴布置、反向旋转的旋翼。传动轴间布置深沟球轴承以减小两个旋翼传动轴间、传动轴与机体间的摩擦阻力,并保证轴间的同轴度。

图6 “火星飞鸟-I”的结构Fig.6 Structure of the “MarsBird-I”
考虑机构受力特点,选择各齿轮模数均为1 mm、厚度均为6 mm,主动轮齿数为28,从动轮齿数为110,故传动比i为3.93。依据双旋翼气动特性预测结果,可计算推进电机的转速nm和功率Pm
(5)

表2 “火星飞鸟-I”组成部分质量分配Table 2 Quality distribution of each part for “MarsBird-I”
“火星飞鸟-I”的控制系统组成如图7所示。上位机搭载控制程序界面,通过交叉网线与工业控制计算机进行数据交换,下位机的数据采集卡向电机驱动器发出转速控指令并接收数据。选择型号为ESCON 70/10的maxon驱动器对推进电机施加控制电压以控制其转速,采集编码器的脉冲信号并转换为电压输出以实现电机转速和电流的实时监测,进而获得旋翼所受反扭矩和消耗功率值。

图7 “火星飞鸟-I”的控制系统Fig.7 Control system of “MarsBird-I”
“火星飞鸟-I”利用共轴双旋翼实现推进与悬停控制,相对其他研究机构提出的多旋翼构型和固定翼-旋翼复合构型而言,系统复杂度更低且结构紧凑;“火星飞鸟-I”的桨叶具有独特的NACA 6904翼型和梯形平面形状,相对马里兰大学共轴式火星飞行器所采用的蒙皮骨架式桨叶结构,具备更简单的结构和更强的单位质量带载能力。
2 地面测试试验装置设计
2.1 火星大气环境模拟器设计
为开展火星飞行器样机推进性能测试试验,构建火星大气环境模拟系统,如图8所示。

图8 火星大气环境模拟器Fig.8 Martian atmosphere simulator
模拟器由罐体、泵组、比例阀、传感器与电控系统组成。罐体为圆柱形,其高度和直径均为3 m,由厚度为10 mm的钢板焊接而成,其底部焊接九宫格排布型式的工字形槽钢。罐壁焊接各类法兰接口以连接管道与传感设备,并安装有两个观察窗以便实验人员观察设备运转状况。实验装置安装在罐体内部,其电气线路通过罐壁航空插头接口法兰接至模拟器控制柜。两级泵组用于降低罐内气压,通过控制柜内变频器实现启停控制。旋转叶片泵将罐内气压降至罗茨泵启动压力,罗茨泵进一步将罐内气压降至火星表面压力。金属波纹管连接泵组与罐体,可减小气体传输过程中泵组振动对连接密封性产生的影响。手动蝶阀用于控制泵组至罐体的气体通道通断,可在泵组停转后保持罐内压力。连接二氧化碳气瓶的进气比例阀用于模拟火星表面大气成分,与泵组联合改变罐内空气成分。考虑抽气后罐体内气体压力不均对测量产生的影响,沿竖直方向在罐壁布置三个低压测量精度较高的电容薄膜真空规,利用压阻电阻复合真空规为电容薄膜规提供气压值调零参考。泄气阀用于在实验结束后利用内外压差向罐内充入大气以使其恢复环境气压。实验人员通过槽型舱门进入罐内进行操作。
火星大气环境模拟器电气控制系统包含计算机单元、泵组控制单元、压力调节单元和传感单元。上位机运行人机交互界面,并通过交叉网线获取、存储并分析下位机采集的实验数据。下位机包含CPU和数据采集卡等,通过接线端子连接继电器、驱动器和真空规等元器件。继电器驱动电路控制时间继电器和电磁继电器通断,进而控制泵组控制柜中的变频器和风机,最终控制泵组启停与转速。
图4给出了微通道分支数n =3,热流密度=30W/cm2,质量流率=3g/s时热沉热应力云图的外视图、侧视图,热沉微通道结构的热应力云图和热沉热应力切片云图。
压力控制单元是模拟器控制系统的核心,气压调节控制流程如图9所示。上位机向下位机发出指令气压信号后,旋转叶片泵启动并按指定速度抽气。压阻电阻复合真空规实时监测罐内气压值,并将数据传输至上位机。当罐内气压低于罗茨泵启动压力后,罗茨泵使能并运转。上位机通过电容薄膜规实时监测罐内气压值,并将数据反馈给控制器。泵组与比例阀控制程序在对比实际气压与期望气压后将控制电压输给泵组变频器与比例阀驱动器,进而调节泵组转速与比例阀开口大小,实现罐内气压控制。

图9 火星大气环境模拟器控制系统架构Fig.9 Architecture of the Martian atmosphere simulator control system
火星大气环境模拟器技术参数见表3,满足火星飞行器推进性能测试试验所需环境要求。

表3 火星大气环境模拟器技术参数Table 3 Specification of Martian atmosphere simulator
2.2 重力补偿与运动约束装置设计
为验证火星飞行器的负载能力与悬停性能,在模拟火星大气环境与重力场条件下,对“火星飞鸟-I”推进性能展开试验研究。重力补偿与运动约束装置安装在火星大气环境模拟器内,控制线缆通过罐体壁面航空插头法兰接到控制柜内,如图10所示。
为验证“火星飞鸟-I”的推进性能,需研究能使样机克服2.0 kg火星重力所需的上下旋翼转速,应消除由于上下旋翼转速不匹配而引起样机偏航角所带来的干扰。装置采用滚珠花键结构以确保键轴与键母之间仅存在上下移动的自由度,可解决系留样机自转引起的线缆缠绕问题。“火星飞鸟-I”通过其底部法兰安装在滚珠花键轴顶端,花键母与底座安装法兰相连。花键轴底部安装限位块,以防止样机脱离测试装置。限位块底部粘贴弹性缓冲垫,以防止推力不足时样机瞬间下落引起的机械破坏。将两组对称布置的砝码系在尼龙绳上绕过定滑轮以补偿地球和火星间的重力差异。滑轮悬吊在通过支承立柱与安装法兰相连的滑轮安装板上。试验开始前,试验人员使用拉力计模拟旋翼向上的推力,并通过调节砝码质量控制样机起飞推力。
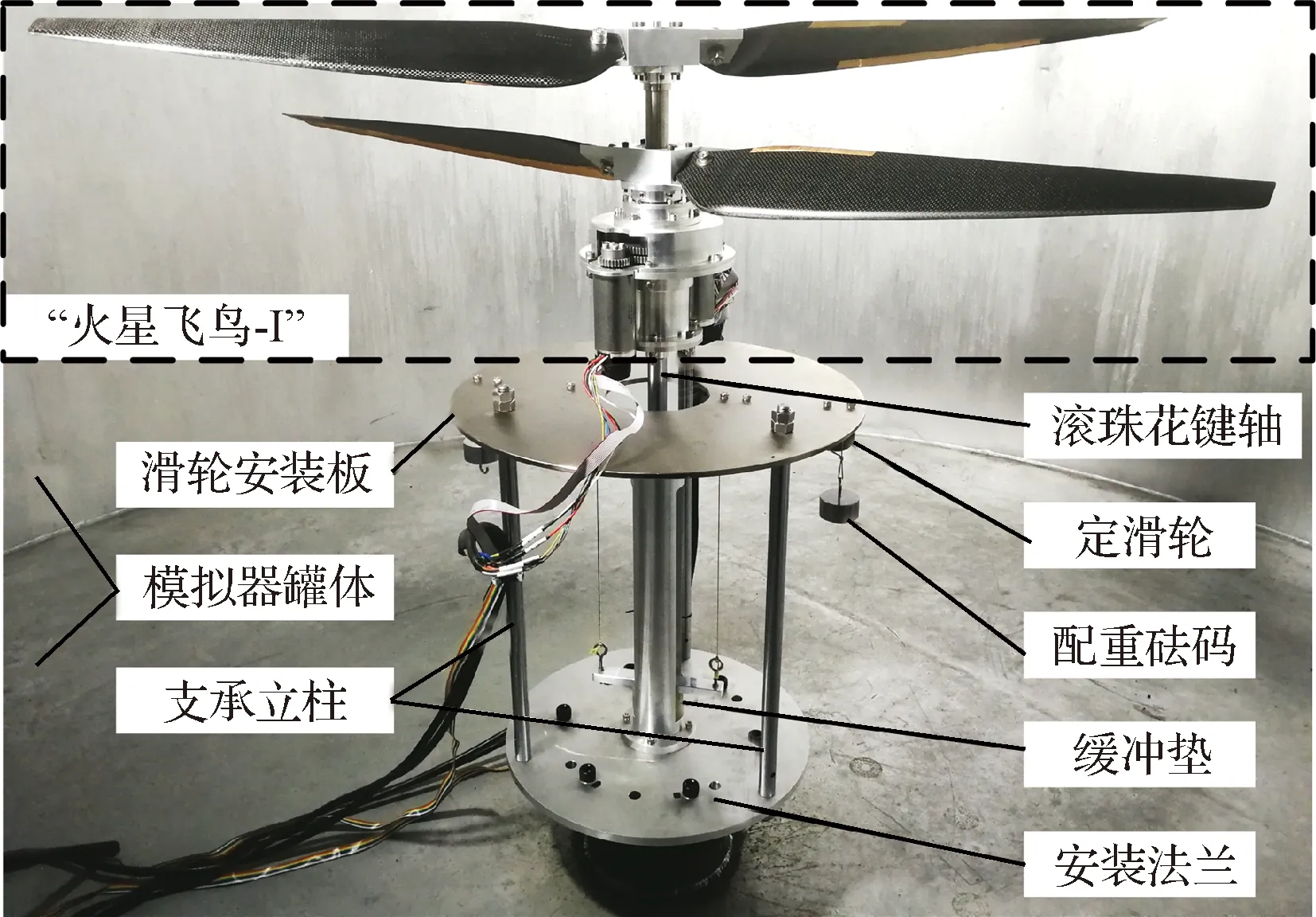
图10 “火星飞鸟-I”及其试验装置Fig.10 “MarsBird-I” and its experimental setup
3 火星飞行器推进性能验证
为验证火星飞行器旋翼在低雷诺数流场中的推进性能,需保证试验环境大气密度与实际火星大气密度一致。试验条件依据理想气体状态方程确定:
(6)
式中:PExp为试验环境气压;PMars为火星表面平均气压;TExp为试验环境温度,TMars为火星表面平均温度;MExp为试验中环境气体平均分子量,取空气相对分子质量,MMars为火星表面气体平均分子量,取二氧化碳相对分子质量。试验条件与火星大气条件各项物理量对比见表4。经计算,推进性能试验环境具有与典型的火星实际环境一致的大气密度。

表4 推进性能试验条件与火星实际大气条件对比Table 4 Comparison of propulsion performance test conditions with actual atmospheric conditions on Mars
按上述测试条件设置火星大气环境模拟器内压力,开展“火星飞鸟-I”的垂直飞行与悬停试验。依据火星重力与地球重力的差异,调节试验装置中配重砝码的质量以模拟火星环境中的不同载荷,同步提高上下旋翼转速,并记录不同负载下飞行器稳定悬停于一定高度的旋翼转速,见表5。试验表明“火星飞鸟-I”带载能力随转速增加而逐渐增强。

表5 “火星飞鸟-I”悬停飞行带载性能Table 5 Hover performance of “MarsBird-I”
“火星飞鸟-I”在模拟火星环境中带2.0 kg载荷的飞行试验如图11所示。初始时刻,双旋翼保持静止,如图11(a)所示;同时增加上下旋翼转速,发现当上下旋翼转速均为2170 r/min时,样机可克服模拟火星重力起飞,如图11(b)所示;继续增加两个旋翼转速,样机垂直飞行高度逐渐增加,如图11(c)所示;同时调整双旋翼转速,发现当上下旋翼转速均为2160 r/min时,样机可在固定高度稳定悬停,如图11(c)与图11(d)所示。
“火星飞鸟-I”稳定悬停时,上旋翼推进电机电流值为7.35 A,即消耗功率为176.4 W;下旋翼推进电机电流值为7.3 A,即消耗功率为175.2 W。样机悬停消耗总功率为351.6 W,与数值预测结果对比,可知旋翼传动机构总效率约为37.82%。试验表明,设计的旋翼系统具有良好的低雷诺数环境悬停性能,“火星飞鸟-I”可在模拟火星环境下悬停飞行。
4 火星飞行器技术展望
基于“火星飞鸟-I”的设计过程与地面试验验证结果,旋翼式火星飞行器设计与控制技术在以下方面尚存在研究价值:
1) 旋翼驱动与传动机构优化设计:“火星飞鸟-I”利用两组齿轮传动机构实现旋翼驱动,导致散热困难,引起飞行效率的降低,故需优化传动链设计以提高能量利用率。
2) 操纵机构设计与优化:“火星飞鸟-I”采用固定桨夹维持旋翼桨距角不变,这导致飞行器无法获得俯仰力矩和横滚力矩以调节位姿,故需设计旋翼操纵机构以调节旋翼转速及桨距角变化规律,进而控制旋翼产生的力和力矩。
3) 飞行器机电控系统集成:“火星飞鸟-I”机械结构质量较大,需通过更换材料与结构拓扑优化等手段进行减重设计。此外,“火星飞鸟-I”需通过线缆连接至模拟器罐外的电气控制硬件,属于系留飞行器。为实现飞行器的工程化应用,需采用嵌入式硬件开发控制系统,并将控制电路集成化。
4) 状态估计与自主飞行控制:“火星飞鸟-I”未安装位姿传感器,其垂直飞行与悬停均需手动控制。由于地球与火星存在通信时延,地面难以对飞行器发出实时控制信号,故需开发自主飞行控制算法。
考虑以上技术发展要素,提出具备飞行控制功能的火星飞行器设计方案,如图12所示。该飞行器方案的主结构是中心承力管,采用两个外转子电机直接驱动上下旋翼,利用斜盘机构调节桨叶桨距角,以实现飞行中的位姿控制。传感器、控制电路与有效载荷安装在机身下方以降低整机重心位置,顶端的太阳能电池板用于为锂电池组充电。

图12 具备飞行控制功能的旋翼式火星飞行器方案Fig.12 Mars rotorcraft scheme with flight control function
具备飞行控制系统的火星飞行器以处理器、微控制器和FPGA构成控制系统的核心架构,如图13所示。负责高层信息处理的处理器接收来自导航相机的图像数据,将解算出的位置、姿态等导航信息传输至下一层的微控制器,将返回相机拍摄的照片通过Zig-Bee协议传输至漫游车基站的工作站,并接受来自基站的高级指令。微控制器通过FSMC(Flexible static memory controller)总线与底层的FPGA(Field pragrammable grate arragy)进行信息交互。FPGA直接控制推进电机及其驱动、操纵电机及其驱动、位姿传感器、时间控制模块、电源管理模块和热控模块等。
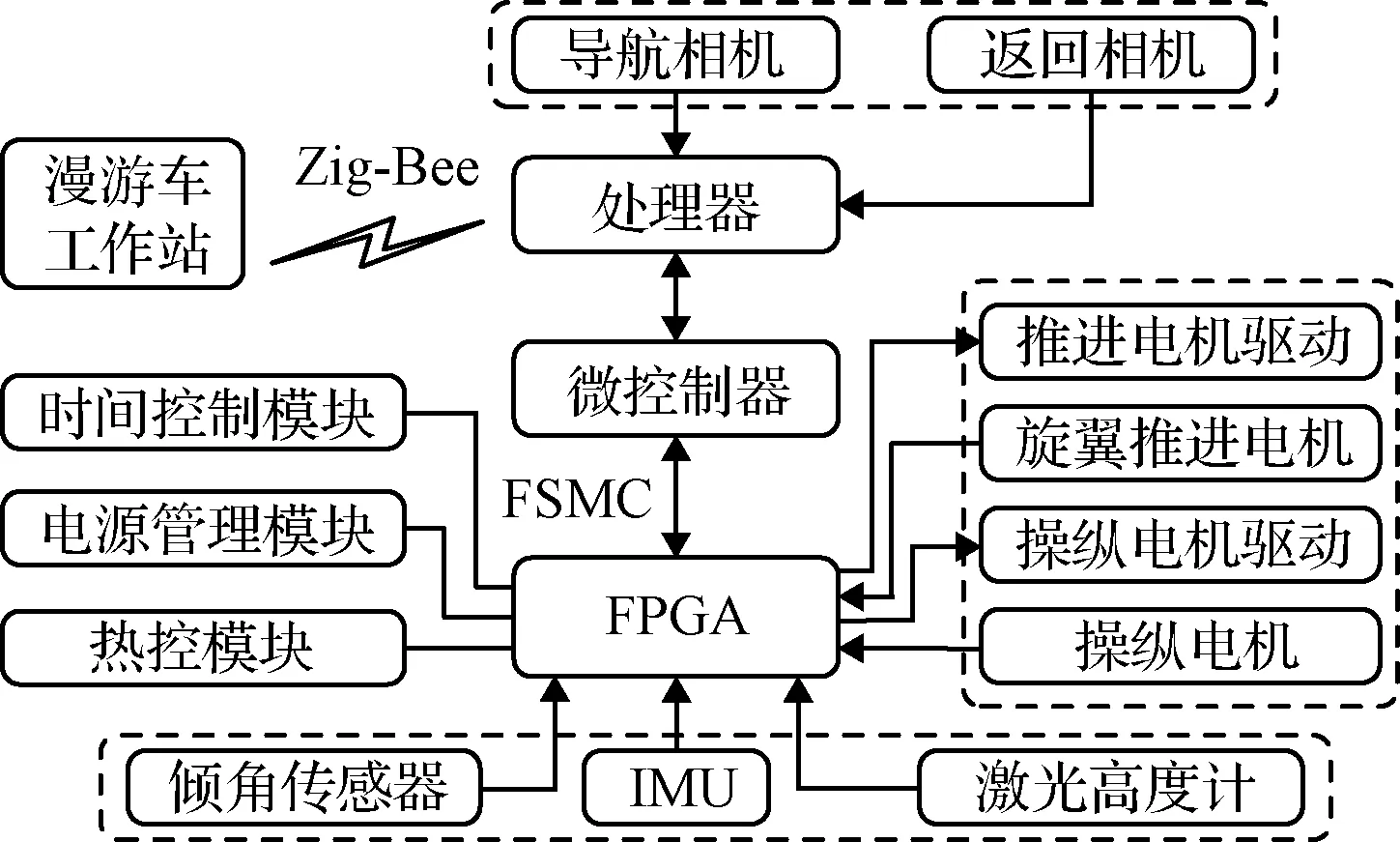
图13 旋翼式火星飞行器的控制系统组成Fig.13 Control system composition of the Mars rotorcraft
5 结 论
1) 针对火星旋翼飞行器探测方案,考虑旋翼桨叶在火星大气中的升阻特性,本文提出了一种可用于共轴双旋翼式火星飞行器的桨叶构型,该桨叶翼型为NACA 6904、平面形状为梯形且扭转角线性分布,可为火星飞行器提供足够升力并具有较高气动效率。依据旋翼桨叶气动特性数值模拟结果,优选了旋翼系统飞行参数,完成了原理样机“火星飞鸟-I”的机电一体化系统设计。
2) 搭建了具有较强真空能力、较大试验操作空间、较长压力保持时间的火星大气环境模拟器,采用两级泵组抽取模拟器内空气,利用进气比例阀向模拟器内输送二氧化碳,通过真空规测量模拟器内气压以实现压力闭环控制。构建了重力补偿与运动约束装置,可补偿地球重力场与火星重力场的差异,提供火星飞行器推进性能地面测试条件。
3) 开展了模拟火星环境条件下的火星飞行器推进性能测试,验证了“火星飞鸟-I”可带2 kg载荷在模拟火星条件下垂直飞行和稳定悬停。分析了旋翼式火星飞行器技术的发展方向,并提出了具备飞行控制功能的旋翼式火星飞行器设计方案。
本文研究成果为我国火星探测工程中火星飞行器旋翼系统设计与飞行原理验证提供了一种技术参考。
