智能车辆换道潜在冲突分析与风险量化方法*
2021-12-11陈吉清翁楚滨兰凤崇
陈吉清,翁楚滨,兰凤崇
(华南理工大机械与汽车工程学院,广州510640)
前言
智能车辆行驶在多车道的道路上时,其智能系统常须控制车辆进行车道变换动作。这个过程往往涉及执行车辆与多车道车辆交互行为,因而是一个具有较高碰撞风险的行驶动作。如果产生不安全的换道行为,不仅使交通流受到影响,造成交通拥堵,还易导致交通事故的发生[1]。因此,在智能车辆执行换道前,进行换道安全评价,为换道决策与规划提供辅助信息,以实现智能车辆的安全换道,显得尤为必要。
从本质上来讲,换道是一种交通行为,因而换道安全评价也是交通安全评价研究领域的一个分支。以交通事故数据为支撑,从交通事故的微观行为角度出发,探讨交通风险产生的根本因素,是研究交通安全评价最为直观有效的路线。Ferreira等[2]利用历史碰撞数据研究了交通安全评估方法,主要涉及碰撞频率和严重程度的推导。这一研究路线的深入探索对交通统计数据的要求很高,然而交通事故的发生频率较低,且具有随机性,导致样本数据不足,难以得出正确的统计规律,这给交通事故数据的采集带来很大困难。为此,有学者提出交通冲突的概念,并总结了交通冲突技术[3]。该技术基于传感器与通信技术,在事故发生前观测大量非事故数据,通过分析车辆的轨迹数据来得到与事故高度相关的危险动作,具有“大样本、短周期、小区域、高信度”的统计学优点[4],受到了相关领域的广泛重视。
基于交通冲突理论,学者对换道行为的安全评估展开了大量研究。Park等[5]提出变道风险指数(lane change risk index,LCRI)来评估被试车辆变道时的碰撞风险,并将故障树分析(fault tree analysis,FTA)应用于评估框架。Zheng等[6]提取左转车辆与直行车辆之间的碰撞时间(time to collision,TTC)和后侵入时间(post encroachment time,PET),采用二元极值模型整合交通冲突指标对事故进行估计。容颖等[7]采用TTC和PET等指标,建立了双车道高速公路车辆运行风险评估模型。Oh等[8]使用二元logistic回归对变道决策进行建模,估计轨迹是否变道的概率,结合指数衰减函数和TTC,评估碰撞概率。Weng等[9]分别使用避撞减速率(deceleration rate to avoid the crash,DRAC)和Delta⁃V计算碰撞概率和严重程度,并将它们作为变量之一,进行道路工作区域的车辆并道行为建模。周斌宇[10]结合TTC和制动避险时间(time to aviod,TTA),综合分析两者关系,建立了危险系数以便对换道碰撞危险程度进行量化,并应用于车辆安全换道预警机制的设计。何爱生[11]以TTC为指标,考虑目标车道后车辆减速度变化建立了安全换道模型,并根据不同的换道动作设置相应的换道预警阈值。杨俊[12]定义了频繁换道行为,并通过标定TTC和PET的阈值,对车辆轨迹进行冲突分析,以频繁和非频繁换道的冲突数作为评价指标来量化频繁换道对交通安全的影响。王畅等[13]基于真实人员的换道安全性决策数据,分析了不同时刻的TTC特性,并由此确定了不同级别换道预警规则的TTC阈值。
当前的换道安全评估研究主要针对如何基于交通冲突指标衡量换道过程的碰撞概率,缺乏综合考虑碰撞可能性与碰撞严重程度来量化碰撞风险的研究。在研究视角方面,多将换道视为一个整体过程,未考虑在换道的不同阶段车辆所面临的风险来源的差异。另外,由于缺乏大量有效的自然驾驶数据的支持,许多评估方法仅提供了思路,对所构建的安全评价方法的客观性未进行充分的分析与探讨。
从交通安全的角度来看,车辆换道的风险主要从该轨迹可能导致的交通事故带来的人或车的损失进行衡量。本文基于潜在冲突分析,对车辆在不同阶段与周围车辆的潜在冲突形式进行分析,从碰撞可能性与碰撞严重程度两个方面建立换道的综合风险量化方法,并利用自然驾驶轨迹数据集对方法进行量化验证。在缺乏有效的真实换道事故数据的情况下,探寻客观科学地对换道轨迹进行风险量化的方法,以帮助实现智能车辆更安全的换道。
1 换道潜在冲突形态分析
何仁等[14]将换道过程划分为3个阶段,即准备阶段、执行阶段和后调整阶段[14];本文中为便于区分不同阶段主车与原车道和目标车道的关系,将换道过程分为准备阶段、跨道阶段和回正阶段,每个阶段有对应的轨迹阶段。一般来说,准备阶段是指驾驶员产生换道意图后,观察周边车辆的运动情况,打开转向灯,并随时准备换道的阶段;跨道阶段是指驾驶员转动转向盘,使车辆在前进的同时进行横向位移,直至整个车辆移出初始车道,进入目标车道的阶段;回正阶段则指驾驶员往相反方向转动转向盘,使车辆在目标车道上回正,同时对车辆与车道线的间距进行微调的阶段。其中,按车辆整体是否越过车道线为分界点,来划分跨道阶段和回正阶段,如图1所示。图中红色曲线为换道过程车辆中心(车辆外接长方体的质心)轨迹在地面的投影。下面按3个阶段对主车与不同旁车的潜在冲突进行分析。

图1 换道阶段划分
在换道准备阶段,为调整纵向位置,以便执行换道动作,该阶段驾驶员往往会存在加速或减速的动作,因而可能会与原车道的前后车发生追尾碰撞,潜在碰撞形式如图2所示。

图2 换道准备阶段潜在碰撞形式
跨道阶段,主车驾驶员转动转向盘,使车辆从原车道向目标车道移动。在此阶段,主车可能与邻后车、邻前车发生侧向碰撞,也可能与前、后车发生追尾碰撞,如图3所示。

图3 跨道阶段潜在碰撞形式
在回正阶段,车辆整体已完全越过了车道线,正进行车辆的回正和横向位置的微调。在此阶段,主车与原车道的两车基本已没有冲突风险,只存在目标车道前后车的追尾碰撞风险,如图4所示。
图4 回正阶段潜在碰撞形式
综上所述,换道阶段主车与不同旁车的潜在冲突形式如表1所示。以TTC为度量指标的先决条件是交通参与者存在预定碰撞轨迹,即以当前的车速(后车速度比前车快)和方向行驶,根据几何计算,必然会发生碰撞。由于预定碰撞轨迹的假设并不能完全识别换道过程的风险[15],易遗漏跨道阶段的侧面碰撞风险,因此在选用度量指标时,应选择不依赖于预定碰撞轨迹的度量指标来估计换道风险。

表1 换道各阶段旁车与主车潜在冲突形式
2 换道风险量化方法的建立
换道风险量化方法的整体思路可分为3个步骤:首先从微观角度出发,对每一个时刻点的换道车辆与某一旁车的冲突风险进行量化;随后从整条换道轨迹的所有时刻点冲突风险中进一步提取宏观风险特征;最后通过系统性风险分析,量化换道车辆与所有旁车的风险值。
2.1 微观冲突风险指标
微观冲突风险指标须满足以下两方面的作用:①对某一时刻,主车与某一旁车是否存在换道冲突进行判别;②能有效区分不同冲突形态对车辆可能带来伤害的不同程度。单一的风险指标难以实现上述目标。为充分考虑换道过程的非预定碰撞轨迹交通冲突,选用不基于预定碰撞轨迹假设的停车距离指数(stop distance index,SDI)来作为主车与某旁车是否存在换道冲突的判别指标;同时,考虑不同侧面碰撞角度带来的不同后果,基于冲突能量判别法推导得到损失能量指数(loss energy index,LEI),由此衡量冲突可能对车辆带来的伤害严重程度。
2.1.1 停车距离指数
停车距离指数是根据停车视距(stopping sight distance,SSD)来确定车辆碰撞风险的指标[16]。它指的是同一车道上,车辆行驶时遇到前方障碍物而必须采取制动停车时所需要的最短行车距离[17]。在如图5所示的典型同向双车道5车换道场景的某一时刻t,主车的停车视距为

图5 5车换道场景主车与周围车辆的定义

式中:S1,M(t)为t时刻驾驶员反应时间内车辆行驶的距离;S2,M(t)为t时刻开始制动汽车到汽车完全停止所行驶距离;vM(t)为当前时刻的主车车速,km/h;f为路面与轮胎的纵向摩擦阻力系数,取决于路面情况与轮胎的材质、纹路、磨损程度等;tr为驾驶员的反应时间,一般取2.5 s;Ss为安全距离,一般在使用停车视距直接作为制动决策的依据时需要设置,本研究将其用于风险的量化判断,为使量化结果更为直观,Ss取0。基于主车与前车的停车视距,某一时刻的主车与前车之间的停车距离指数为

式中:SSDFO(t)、SSDM(t)分别为t时刻前车CFO和主车CM的停车视距;lM,FO(t)为t时刻前车CFO与主车CM的间距。若SDIM-FO(t)不为正值,说明当前车突然全力制动时,主车无法进行适当的操作来避免与前车相撞,两车存在碰撞风险。据此,将SDI值是否小于0作为主车与相应的旁车存在冲突的判别标准。与式(2)的推导过程同理,主车与后车、主车与邻前车、主车与邻后车的停车距离指数为
式中:SSDRO(t)、SSDFT(t)、SSDRT(t)分别为t时刻后车CRO、邻前车CFT和邻后车CRT的停车视距;lM,RO(t)为t时刻后车CRO与主车CM的间距;lM,FT(t)为t时刻邻前车CFT与主车CM的间距;lM,RT(t)为t时刻邻后车CRT与主车CM的间距。
2.1.2 损失能量指数
冲突能量判别法是根据在交通冲突发生时,如果不采取避险措施会产生的碰撞伤害能量的大小进行严重交通冲突的判别[18]。在遭遇典型碰撞事故时,车辆的碰撞能量计算模型可以从力学的角度,通过动能和动量守恒定律等进行推导。由换道潜在冲突形态可知,在同向双车道车辆换道场景中,各车辆整体同向行驶,两车航向夹角远小于90°,在该场景中主要出现追尾碰撞和侧面碰撞两种可能。
(1)追尾碰撞能量模型的建立
以车辆行驶方向为正向,两车追尾碰撞前后的速度变化如图6所示。其中前车质量为m2,碰撞前后速度分别为v2、v′2;后车质量为m1,碰撞前后速度分别为v1、v′1。

图6 追尾碰撞速度方向变化示意图
当两车发生碰撞时,根据能量守恒定律,碰撞损失能量为

忽略碰撞瞬间两车的地面摩擦力,根据动量守恒定律可得

碰撞恢复系数e为

由式(7)和式(8)可以将碰撞后的速度写为

将式(9)和式(10)代入式(6)化简得到追尾碰撞损失能量为

(2)侧面碰撞能量模型的建立
车辆不同位置的刚度不同,车辆发生侧面碰撞时所产生的能量转移在一定程度上受碰撞位置的影响。由于当前的轨迹预测技术尚未能对碰撞位置进行较为精确的预测,且考虑碰撞位置会大幅增加模型推导的难度,本研究忽略碰撞位置的影响,假设换道过程的跨道阶段可能发生的潜在侧面碰撞均为侧面向心斜碰撞,即发生冲突碰撞两车的质心连线与主撞车适度矢量在一条直线上。对向心斜碰撞单纯分析其受力方向与速度方向的变化均较抽象,因此将侧面向心斜碰撞分解为侧面向心正碰撞与追尾碰撞的组合碰撞,如图7所示。车辆的冲突碰撞形式被分解为主撞车1和主撞车2分别同时冲突碰撞的形式,其中主撞车1的初始速度为v1x=v1sinθ,主撞车2的初始速度为v1y=v1cosθ。

图7 侧面向心斜碰撞运动分解示意图
主撞车1与被撞车的侧面向心正碰撞的速度变化示意图如图8所示。根据能量守恒定律可得侧面向心正碰撞的损失能量:

图8 侧面向心正碰撞前后瞬间两车的速度变化示意图

忽略碰撞瞬间两车的地面摩擦力,由动量守恒定律可得

由矢量关系有:

碰撞恢复系数为

联立式(12)~式(15)可得侧面向心正碰撞的损失破坏能量为

按照式(11),分解得到的追尾冲突碰撞能量可以写为

式中e2为所分解的追尾碰撞的碰撞恢复系数。
由式(16)和式(17),侧面向心斜碰撞的碰撞损失能量可以写为

(3)损失能量指数的定义
碰撞损失能量越大,并不意味着碰撞对车辆造成的损伤越大。对于车辆来说,还要结合车辆自身能承受的能量来分析。车身所能承受的碰撞能量与车辆的质量有关,质量越大,所能承受的碰撞能量也就越大。因此,采用碰撞损失能量与车辆自身质量的比值来衡量碰撞严重程度,称为损失能量指数LEI。碰撞恢复系数e与参与碰撞车辆的车身材料有关,为便于计算,将车辆均假设为刚体,则所发生的碰撞是完全非弹性碰撞,e取为0。追尾碰撞的损失能量指数可以写为

式中rm表示主撞车与被撞车的质量比。当它越大,主撞车的损失能量指数越小,则主撞车的碰撞严重程度越小。同理,侧面向心斜碰撞的损失能量指数为

对比式(19)和式(20)可知,当侧面碰撞的夹角θ为0时,侧面碰撞与追尾碰撞LEI的计算公式相同。因此,也可以把追尾碰撞看成是夹角θ为0的侧面碰撞,则损失能量指数的计算公式可统一为

式中:LEI(t)表示t时刻的两车损失能量指数;v1(t)、v2(t)分别表示t时刻两车的速度;θ(t)表示t时刻两车的航向角夹角,若潜在碰撞形式为追尾碰撞,则θ(t)默认为0。
2.2 宏观换道风险特征
冲突风险指标定义了微观层面上的风险,即某一时刻主车与某一旁车之间存在的换道冲突风险。为从宏观的层面表征整个换道时域内的主车与某一旁车之间的冲突风险,在冲突风险指标数据中进一步提取两个统计特征,称为风险暴露水平(risk exposure level,REL)和风险严重程度(risk severity level,RSL),进行进一步的宏观量化。
2.2.1 风险暴露水平
风险暴露水平REL用于衡量整个换道过程,主车与某一旁车发生碰撞的可能性。为对REL进行定义与计算,首先对风险暴露状态δ进行定义。按图1所示的换道轨迹划分方法,在不同的换道阶段内,对不同位置的旁车是否处于风险暴露状态的定义有所不同。由表1可知,原车道的前车CFO和后车CRO只在准备阶段和跨道阶段有与主车发生追尾碰撞的风险,因而CM与CFO、CRO之间的风险暴露状态为

式中:δ(t)=1表示CM处于风险暴露状态,δ(t)=0表示CM未处于风险暴露状态。显然,只有当时间帧t处于换道准备阶段(T0≤t≤T2),且SDI不大于0时,才认为CM与CFO、CRO之间处于风险暴露状态。
同样由表1可见,目标车道的前后车CFT和CRT在换道的跨道阶段有与主车发生侧向碰撞的风险,在换道的回正阶段,有与主车发生追尾碰撞的风险。虽然在换道跨道阶段,两车并非在每一时刻t都与主车处于相同的车道,但主车的运动趋势是在向目标车道逼近,因此认为在此阶段内的两车与主车之间的SDI不大于0时,有发生侧向碰撞的风险。CM与CFT、CRT之间的风险暴露状态为

当换道时长相同时,处于风险暴露状态的时间越长,主车与相应的旁车发生碰撞的可能性也就随之增加。因此,将定义REL为CM处于风险暴露状态的时间占换道总时长的比值,相应的计算公式为

式中ΔT表示换道总时长。显然,REL的取值范围为[0,1]。
2.2.2 风险严重程度
风险严重程度RSL用来衡量整个换道过程中,主车与相应位置旁车的潜在冲突风险的严重程度。对所有δ(t)=1的时刻使用式(21)计算损失能量指数,若潜在碰撞形式为追尾碰撞,潜在碰撞夹角θ为0;若潜在碰撞形式为侧面碰撞,潜在碰撞夹角θ用两车的航向角夹角近似代替。得到每一风险暴露时刻的损失能量指数后,RSL用车辆可能发生的碰撞最大损失能量指数来衡量,并进行归一化处理,以保证RSL和REL具有相同的取值范围,其计算公式为

式中:LEImax为整个换道轨迹的最大损失能量指数;N(·)为归一化函数。最常用的方法之一是minmax归一化,但该方法的计算需要提前得到变量的理论上限值与下限值。LEI的理论下限值是0,理论上限值难以推导。且由于自然驾驶轨迹本身的特性,采用min-max归一化的结果可能会过多地集中于低风险区间,不便于不同换道轨迹之间的风险值对比。
为使归一化后的RSL能有效区分不同样本的风险区间,采用一种基于统计百分位的非线性归一化方法。该方法求解LEI→RSL的映射关系,从定义域[0,+∞),映射到[0,1]的值域上。该方法映射过程不是简单的线性关系,而是通过函数变换使映射值在值域的分布情况不同于原值在定义域的分布,而最终RSL的统计分布相对平均。将映射分为两步进行,第一步的映射关系设为

该步映射主要改变统计分布,y的值域仍为[0,+∞)。第二步的映射y→RSL则将定义域[0,+∞)映射为值域[0,1],采用如下所示的指数函数模型可以实现:

选用自然驾驶数据中相应LEI值对应的统计百分位数来作为最终的RSL值。在实际应用中,基于大量的自然驾驶轨迹数据,计算得到RSL的大量统计数据,每隔10百分位记录10~90百分位对应的LEI值,将不同的百分位作为最终映射得到的RSL值。根据式(29)计算出对应的y值,如表2所示,然后根据y与LEImax的对应数据,采用数值拟合的方式得到映射关系。

表2 不同百分位数对应的映射值
现举例具体说明两个指标的量化过程。假设邻后车CRT与主车CM在整个换道过程中的SDI曲线变化以及LEI计算结果如图9所示。可以计算得出,对于该换道轨迹,风险暴露时长为ΔT1+ΔT2,风险暴露水平REL为(ΔT1+ΔT2)/(T3-T0),最大损失能量指数为LEI(Ta),风险严重程度RSL为N(LEI(Ta))。

图9 某次换道过程CRT与CM的SDI与LEI计算结果
2.3 系统性换道风险分析
REL和RSL量化了整个换道时域内主车与某一旁车发生碰撞的可能性和严重程度,为衡量主车与所有旁车的系统性换道风险,采用故障树分析法FTA[19]对换道进行系统性风险分析。
FTA被广泛用于分析由人为错误和多种推理因素引起的复杂事件,近年来也广泛应用于交通冲突分析领域[16]。FTA的主要目标是识别整个系统的故障与系统各组成部分的故障之间的关系,并图形化地显示关联事件链。它是识别导致失败的贡献者的有用工具,每个事件的失败概率可被模型合并来评估一个给定的整个系统的功能。
将车辆换道定义为一个可进行碰撞风险分析的系统。事件失效定义为主车CM与周围旁车发生碰撞,记为φ(i)。风险暴露水平REL和风险严重程度RSL定义为两个失效因素。失效事件的发生由这两个因素综合体现,只有这两个因素均达到较高水平时,事件失效风险才达到较高的水平,采用“与”运算来表示这种关系,计算公式为

式中i=1,2,3,4分别表示主车CM与前车CFO、后车CRO、邻前车CFT、邻后车CRT的失效事件。
系统的故障ψ定义为主车CM没能成功换道。而主车CM只要与任何旁车发生失效事件,整个系统就发生了故障,此时的系统故障风险应该达到较高水平。因此,各个失效事件之间应该以“或”运算来得到最终的系统故障风险,计算公式为

完整的故障树推理过程如图10所示。

图10 换道系统故障树推理过程
3 量化方法应用试验
为验证所提出的量化方法的有效性,从自然驾驶数据集中提取换道轨迹样本,以不同类型、不同位置的换道轨迹客观风险特征作为量化指标的评判标准,使用综合量化方法进行风险值量化试验分析。
3.1 自然驾驶数据来源
考虑到国内尚未有成熟的自然驾驶轨迹数据集,采用德国高速公路的大型自然车辆轨迹数据集——HighD数据集[20]作为验证数据集。德国的交通规范与中国类似,遵循左超车原则[21],因而道路交通环境与国内有一定相似性,目前国内已有相关研究采用该数据集进行自动驾驶规划决策的算法研究,并在我国实际道路场景中进行了验证[22-23]。该数据集从德国高速公路的无人机录像中提取车辆的后处理轨迹,包括来自6个地点的11.5 h测量值和110 000车辆,所测量的车辆总行驶里程为45 000 km,其记录场景如图11所示。HighD数据集包含超过11 000个车道变化,数据集的原始数据的质量较高,使用了多个后处理步骤消除了所有记录错误,并平滑了提取的轨迹,因此无须对轨迹做进一步后处理。
图11 HighD数据记录场景
数据集所使用的全局坐标系与视频的图像坐标系相对应,原点位于左上角,如图12所示。坐标系的横轴是x轴,指向车辆行驶方向,向右为正方向;纵轴是y轴,向下为正方向。另外,所有的尺寸都由像素单位转换成了SI单位。车道从上往下由1开始编号,第一条车道线以上、最后一条车道线以下和中间隔离带的非行驶区域也都给予编号。除非另有说明,所有的记录数据都使用全局坐标系。

图12 HighD数据坐标定义
数据集包括从60个录像中提取的数据。其中,01-03、15-24号录像记录的路段为双向四车道;04-14、25-57号录像记录的路段为双向六车道;58-60号录像记录的路段为双向六车道,且在最上方记录了入口匝道的情况。
每个录像数据文件包括4个csv文件。描述位置的csv文件主要包含视频帧率、记录位置、限速情况、记录日期、持续时间、不同类型车辆数量(轿车或载货车)和车道位置等信息。统计车辆情况的csv文件按车辆编号记录了每一辆车的外形尺寸、起始与结束的帧号、类别、行驶方向、换道次数和轨迹全程的最大最小速度等统计信息。车辆轨迹的csv文件是数据集的核心数据,按车辆编号和帧号的先后顺序记录每一辆车的运动信息和周围车辆的信息。
3.2 风险量化数据的获取
3.2.1 换道场景数据提取
首先将换道车辆(主车)的轨迹与车道线的相交点定义为轨迹跨道点;然后从该点沿轨道向后退方向遍历,当连续3个采样点的车辆航向角θ小于阈值θth=0.02 rad时,则将第1个航向角小于阈值的采样点作为换道起点[24]。至于跨道阶段终点,按前面的划分,从轨迹跨道点,沿轨迹向前进方向遍历,当把车辆中心在地面的投影点与车道线的y向距离等于L和W分别为车辆的长度和宽度)时的采样点,即为跨道阶段的终点,也即回正阶段的起点。最后,从该点继续沿轨迹向前进方向遍历,当连续3个采样点的车辆航向角θ小于阈值θth=0.02 rad时,则将第1个航向角小于阈值的采样点作为回正阶段的终点,也即整个换道过程的终点。在整个换道过程,提取主车相应时间帧内的所有轨迹信息,可得到一条完整的换道轨迹。对于记录时间帧内找不到4个分割点的轨迹,均视为不完整轨迹,将其删除。对所有录像的轨迹数据进行提取,得到完整换道轨迹7 047条,其中,向左换道轨迹3 627条,向右换道轨迹3 420条,平均帧数为120.02帧,记录帧率均为25 Hz,平均换道时间为4.80 s。
在提取到主车的换道轨迹后,还须提取相应时间的旁车轨迹,来构成完整的5车换道场景。换道过程中,由于主车自身的运动或其他车道车辆的跨车道运动,主车与旁车所记录的位置关系可能有所变化。在场景提取过程中,统一把主车在轨迹跨道点的前一帧(车道编号仍为原始车道)的前后车编号和目标车道的前后车编号作为整个换道过程相应位置的旁车编号。若不存在相应的旁车编号,则用空缺记号标记,表示主车换道过程中,不存在该位置的旁车。根据旁车编号,提取换道时间帧内相应旁车的轨迹信息,和主车轨迹一起,构成了一条完整场景信息。
3.2.2 未知信息的处理
损失能量指数的计算须使用车辆的质量信息,HighD数据集原始数据并未提供。为此,根据车辆的尺寸信息来近似估算车辆的质量信息。数据集的车辆类型主要包括轿车和载货车两种。查阅德国本土近年的汽车销量情况[25],选择销量领先的一款大众高尔夫轿车与一款奔驰重型载货车,获得其具体的车辆参数如表3所示。按一般道理,车辆的质量近似与车辆外接长方体的体积成正比,但本文所采用的HighD数据集是使用无人机从空中俯瞰拍摄提取的车辆数据,只有车辆的俯视图,无法得到车辆高度的信息,只能权且用质量面积比来代替,实为双重近似,存在一定的误差。根据车辆参数,计算质量与占地面积的比值,称为质量尺寸比。用两款车的质量尺寸比分别近似等同于数据集中拍摄车辆的质量尺寸比,则可通过数据集中的车辆尺寸近似计算车辆质量。

表3 车辆参数
3.3 应用试验与结果分析
3.3.1RSL归一化函数拟合
计算所有完整换道轨迹相应的换道场景中,主车与所有旁车的最大LEI值,统计其中非0值的分布情况如图13所示。可以看到,最大LEI值分布较为集中,主要在20以下的区间内,且频数随量化值的增大逐步降低,符合自然驾驶轨迹的低风险特性。从统计结果中记录10~90百分位对应的最大LEI值,如表4所示。
图13 HighD数据集换道轨迹LEImax统计分布图

表4 HighD数据集不同百分位的映射对应结果
以y为纵坐标,LEImax为横坐标画出y=f(LEImax)函数的拟合样本点,并对函数进行拟合,拟合结果(R2=0.9996)如图14所示。拟合曲线模型为
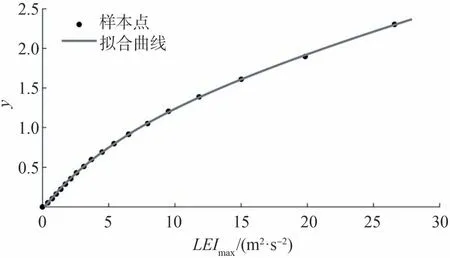
图14 样本点与曲线拟合效果

其中各参数的拟合结果为p1=43.73,p2=2098,p3=-309.3,q1=1018,q2=9960。
联立式(29)和式(32),风险严重程度最终的归一化函数形式为
归一化后,HighD数据集RSL的量化值分布如图15所示。可以看到,采用所拟合的归一化模型后,RSL的量化值较为平均地分布在0-1的各个区间内,有利于智能车辆安全换道决策过程对不同换道轨迹的风险对比分析。

图15 HighD数据集换道轨迹RSL量化结果分布情况
3.3.2 不同类型轨迹的风险量化与结果分析
为对比不同类型的换道轨迹的风险量化情况,将7 047条换道轨迹分为自由换道和强制换道两类。自由换道是指驾驶员为追求更佳的驾驶条件而发生的换道行为,强制换道则是指车辆受前方车辆或道路的阻碍而必须执行的换道行为。统计轨迹跨道点之前,主车与前车的碰撞时间和车头时距,来区分换道轨迹的这两种类型[26]。强制换道的判定标准为:换道前最小碰撞时间在0~10 s的范围内,且最小车头时距小于3 s。不满足该标准的换道均视为自由换道。最终将7 047条分为自由换道4 442组,强制换道2 605组。
采用换道轨迹风险综合量化方法分别对自由换道和强制换道的轨迹进行风险量化,分别统计两种类型轨迹的量化结果在不同区间的分布情况,如图16所示。可以看到,自由换道的轨迹量化风险值集中于低风险区域,尤其是0~0.05的区间内,占样本总体的63.77%;其它区间的样本分布较少,且随着风险值的增大,分布数量也呈下降趋势。而强制换道的量化风险值的分布则较为均匀,且高风险值(>0.5)的样本数较多,分布频率以0.7-0.8区间为峰值向两侧递减,最大分布频率仅占所有样本的9.52%。

图16 两种换道类型风险量化结果
进一步统计自由换道和强制换道的所有样本的换道时长和冲突风险指标的相关统计值,结果如
表5所示。可以看到,强制换道轨迹的换道总时长均值略大于自由换道轨迹,而风险暴露时长均值则是自由换道轨迹的3.15倍,这说明强制换道过程中,车辆在更多的时刻处于风险状态,与周围车辆发生碰撞的可能性更高。且强制换道轨迹的最大损失能量指数均值是自由换道的4.58倍,说明强制换道过程车辆与其他潜在车辆碰撞的严重程度也更高。自然驾驶时,车辆在执行强制换道过程中,往往并不具备理想的换道条件,主车与旁车不一定能保持足够的安全距离,这些因素决定了强制换道客观存在着比自由换道更高的换道风险。由此可见,所提出的换道轨迹风险综合量化方法可较好地反映不同类型的自然驾驶换道过程的风险值。

表5 两种换道类型量化结果统计
3.3.3 不同位置车道的风险量化与结果分析
选择04-14、25-57号共44个双向六车道路段录像数据的换道轨迹。根据主车在换道过程中处于道路的外侧车道(靠近应急车道)、中间车道还是内侧车道,将所有换道样本数据分为内侧换道和外侧换道。内侧换道是内侧车道与中间车道之间的车辆换道动作,外侧换道是指外侧车道与中间车道之间的车辆换道动作。按每一个录像的所有内侧换道与外侧换道数据计算平均量化风险值,得到结果如图17所示。可以看出,对于每一个录像数据,内侧换道的风险均值均高于外侧换道,平均风险差值为0.04。存在这一差距是因为德国的行车规范与我国类似[21],即遵循从左超车原则,规范行车速度内侧车道高于中间车道,中间车道高于外侧车道。这可以通过HighD数据集得到验证:统计44个录像数据中3个位置车道的车辆平均速度结果如图18所示。可以看出,44个录像数据平均车速均遵循从外侧车道到内侧车道依次上升。进一步计算外侧换道和内侧换道的平均换道时长,结果如图19所示。可以发现,内侧换道的平均换道时长普遍比外侧换道短,这表明:由于行驶速度更高,内侧换道行为更加急促,驾驶员需要在更短的时间内完成换道动作,车辆与旁车的碰撞风险增加,最终表现为量化风险值的提高。由此可见,所提出的换道轨迹风险综合量化方法能反映不同位置车道的自然驾驶换道过程风险的高低。

图17 不同位置换道平均量化风险值

图18 不同车道车辆平均车速

图19 不同位置换道平均换道时长
综合对不同类型的换道轨迹风险量化和位于不同位置车道的换道轨迹风险量化的分析结果可知,所提出的换道轨迹风险综合量化方法能合理地对换道风险进行量化。对于自由换道轨迹,量化结果符合其相对集中的低风险特性;对于强制换道轨迹,量化结果符合其高风险特性,且量化结果较为分散,能有效对比区分不同轨迹的换道风险。对于不同位置的换道,量化结果符合内外车道的不同行驶速度带来的客观风险特性。
4 结论
(1)基于交通冲突理论,针对完整的车辆换道过程,分析得出车辆在不同阶段与周围车辆的潜在冲突形式。
(2)通过微观冲突风险指标推导、宏观换道风险特征提取和系统性换道风险分析,建立了同时考虑潜在碰撞的可能性与严重程度的换道轨迹风险综合量化方法。
(3)利用自然驾驶数据,对综合轨迹风险量化方法进行应用试验,验证了该方法的合理性与客观性。在缺乏有效事故数据的情况下,实现了对换道轨迹风险的科学量化。
(4)所构建的综合轨迹风险量化方法,可与轨迹预测技术相结合,基于对换道过程的旁车行驶轨迹的预测结果,量化车辆尚未执行的换道轨迹的碰撞风险,提供先验的换道安全性信息,为结构化道路中的智能车辆安全换道的规划与决策提供有价值的参考依据。
