车辆紧急避撞控制系统研究
2021-12-09罗剑
罗剑
(陕西能源职业技术学院 智能制造与信息工程学院, 陕西 咸阳 712000)
0 引言
随着社会的发展,科技不断创新,许多智能系统逐渐走进大众的视野,帮助人们能够更优质地解决问题,正如在交通安全方面,车辆在紧急避撞系统设置中,安装了智能检测操控设备,它能够融合多种计算数据,利用先进的雷达探测和传输图像等技术,实时监测车辆的安全问题,能够更加准确地获得四周车辆的信息,并及时对车辆进行紧急避撞操作,保障汽车能够安全行驶。
对此,文章进行了以下研究:对避撞系统的各项工作原理分析,运用图像检测车辆速度,计算安全距离范围公式,根据传感器时刻检测与前车的距离变化,对应各种车辆行驶情况做出判断,设计换道减速等避撞行动,并对车辆避撞系统的实际运行进行实验。
1 车辆与前车运行状况控制分析
在车辆行驶过程中,本车辆会通过接收器接收前方车辆的行驶速度情况和与本车相距情况,在这过程中,首先运用前方车辆的智能车监系统联合安装在车前的雷达产生环绕四周的球面毫米波,在接受散射的回波信号后,使发射信号与回波信号混频,从而产生含有前车信息的中频信号,进而提取出相应信息。前方车辆除了本车所在运行车道前的车辆外,行驶在左右两车道的前方车辆也包括在内。若预设的最小安全值大于所测数据,则开启自动换道控制系统[1]。自动换道控制系统的工作原理如图1所示。
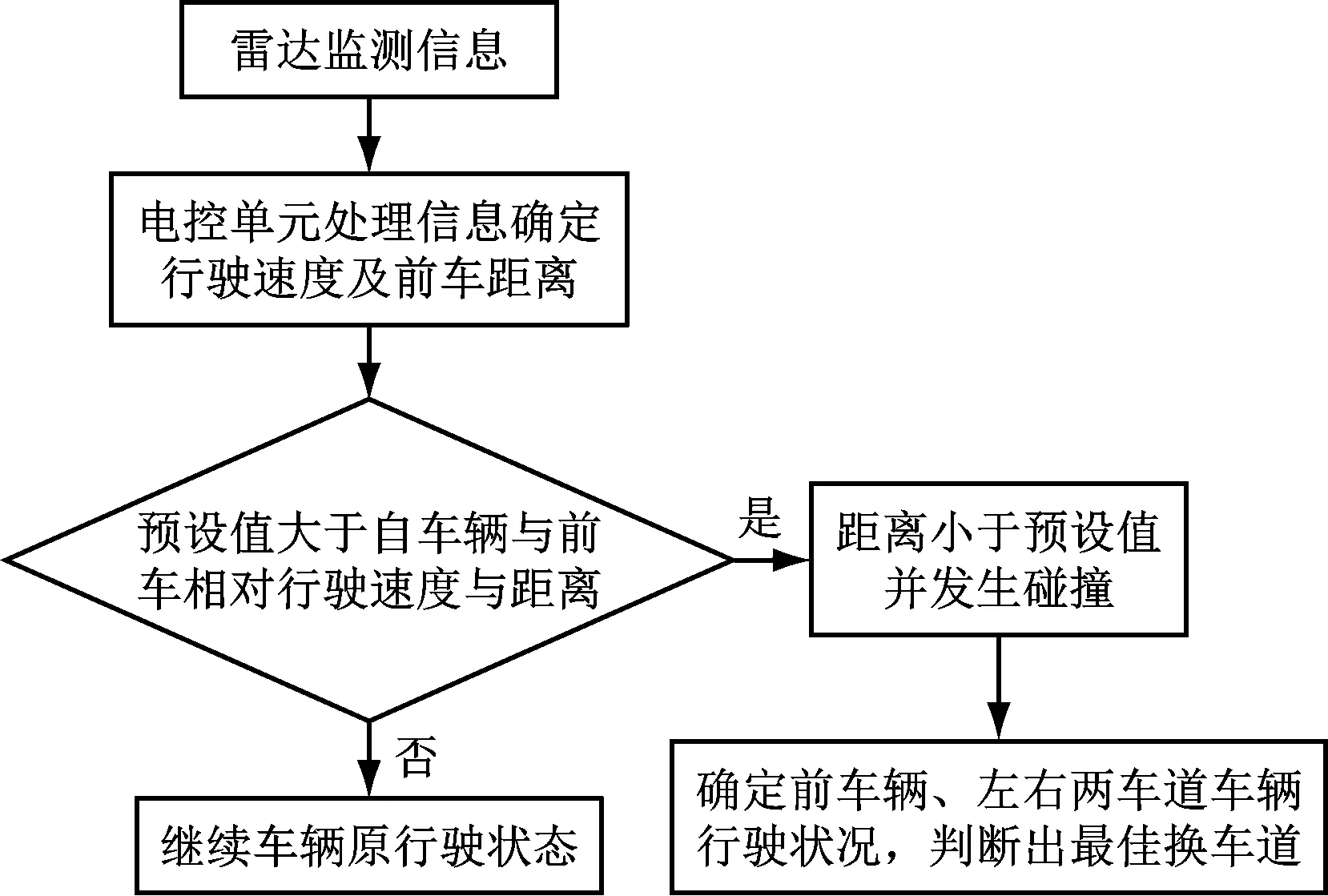
图1 前车监测系统原理图
经过电控单元处理信息对行驶速度以及前车距离进行确定,如果预设值低于自车辆与前车辆相对速度与距离,则车辆继续原始行驶状态。如果预设值高于自车辆与前车辆相对行驶速度与距离,则代表自车辆与前车辆存在碰撞风险,经过对前车辆及左右车道车辆行驶状况判断出最佳换车道。
在雷达系统中主要运用工作波长作为参变量,而毫米波雷达具有的显著特点,对车用防撞系统的实际运用具有巨大优势。雷达信号工作原理如图2所示。
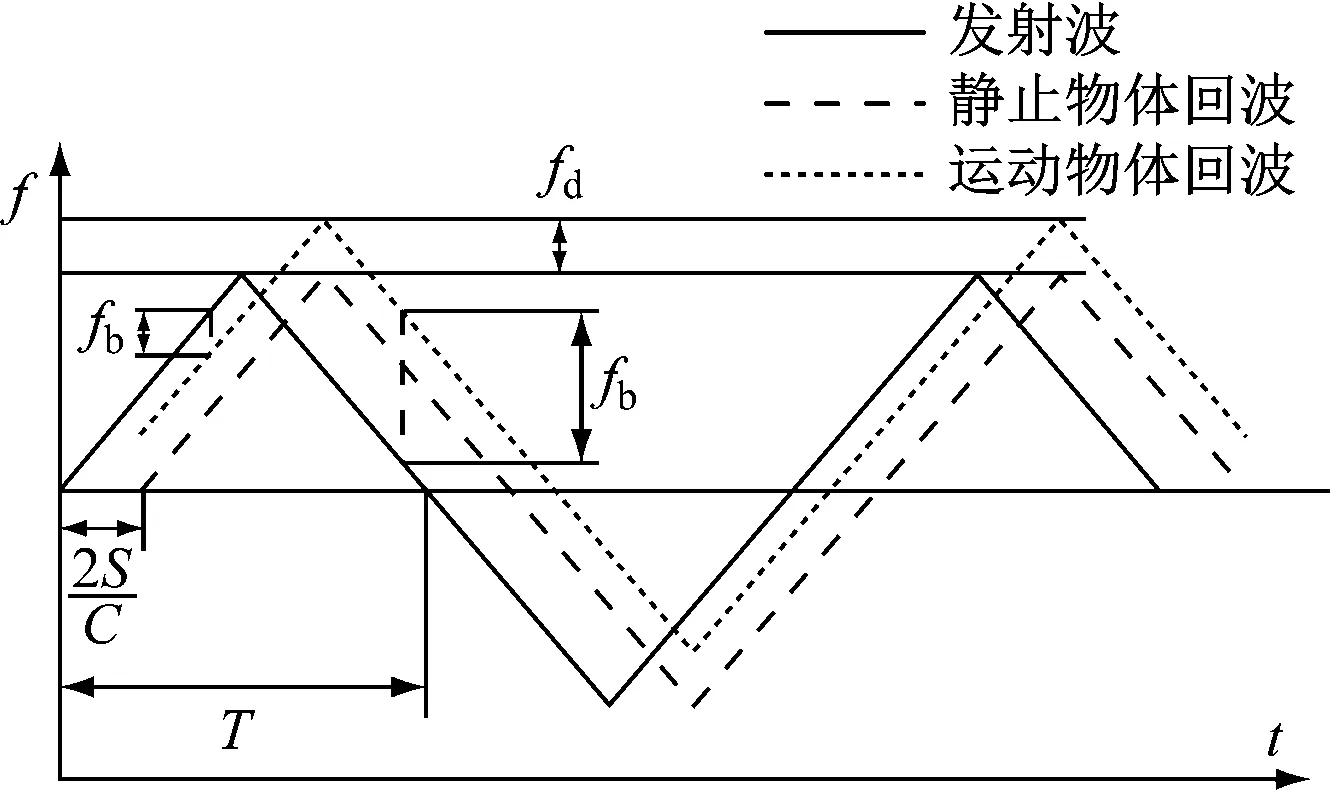
图2 雷达信号工作原理图
调频连续波雷达的方式也直接关系到检测数据的精密度,而连续波相比于其他测速雷达结构更加简单,操作方便快捷,且有较高的精准度。在同时进行测量距离和速度两项数据时,应选择易调制、分辨率高、大频宽、低功耗、性价比高的线性调频连续波(LFMCW)的毫米波雷达。最后,调制波形要选择能够更加准确接受两方面信息的对称三角波雷达(FMCW),通过比较发出信号频率和接收信号频率的频率之差,为系统计算出前方车辆的距离数据[2]。
在物体静止状态下时,如式(1)、式(2)。
(1)
(2)
其中,ft为发射波;B为频宽;f0为中心频率;T为调制周期;fr为静止物体反射波;C为波传播速度;S为被测距离。最后发射波与回收波混频产生的中频信号如式(3)。
(3)
则得出式(4)。
(4)
由式(4)得出,将中频信号进行频谱分析可计算出静止车辆的距离S。
而通过多普勒效应得知出,波在波源与观察者之间存在相对运动的状态下,观测频率与波源频率不相等。也就是多普勒频移fd,而混频后,上升频段和下降频段的差频分别为fb-、fb+。则根据图2可以推算出fb-、fb+与多普勒频移fd的关系式为式(5)、式(6)。
fb+=fz-fd
(5)
fb-=fz+fd
(6)
由式(5)、式(6)可知式(7)、式(8)。
(7)
(8)
将式(7)代入式(4)得出式(9)。
(9)
再由多普勒效应可得知式(10)。
(10)
其中,被测速度为ν;信号的波长为λ。由式(8)和式(10)可计算得式(11)。
(11)
最后动态物体的距离和速度信息由式(9)和式(11)计算得出[3-4]。
2 车辆与两侧车道避撞原理分析
2.1 车辆换道避撞系统的运行
2.1.1 运用图像传感器监控两侧车辆信息,进行避撞控制及检测原理
介于原始的车辆运行系统中,针对汽车两侧车辆的信息并没有一个完善的监测装置,这对行驶车辆两侧的汽车突发情况将存在安全隐患,为优化这一方面,在车辆自动驾驶过程中,为左右两侧车辆的检测设置一套完整的避撞系统。用来传输车辆信息的图像传感器被安装在车辆的左右位置,实时监测两侧车道的状况。图像传感器主要运行原理是对两侧车道进行拍照,将收集到的图像再进行数据分析,可检测行驶车辆两侧有无车辆,进而发现没有车辆运行的一侧车道,或是有行驶速度相对本车辆慢的车辆所在车道,在运用前车运行状态控制系统探测出左右车道前方没有车辆行驶,或者行驶车辆车速大于本车辆行驶速度,两种数据结合,可计算出满足条件的安全车道供车辆进行换道[5-6]。运行车辆两侧车道监控系统原理如图3所示。
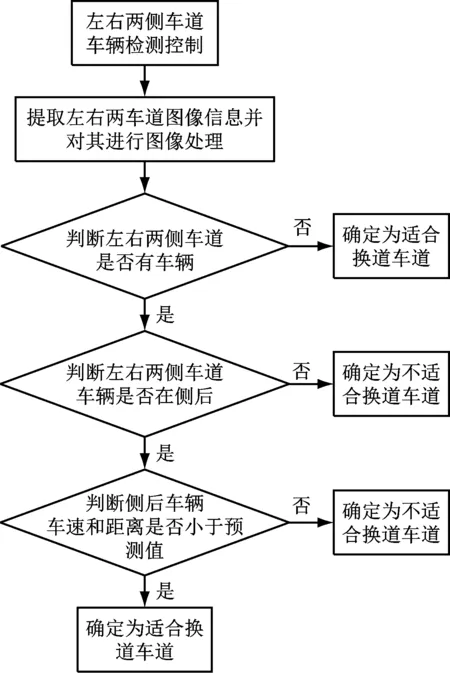
图3 运行车辆两侧车道监控系统原理图
车辆两侧车道监控系统会对两侧车辆进行检测控制,提取左右两车道图像信息并且对信息进行处理,如果左右两侧车道无车辆,则判断为适合换道车道,如果左右两侧车辆在侧后方,则判断为不适合换道车道,如果侧后车辆车速和距离小于预测值,则判断为不适合换道车道。
2.1.2 当侧后方有车辆时,图像传感器的运行
图像传感器通过扫描收集的两侧车道对应信息,运用生成的图片判断出车道中是否有车辆行驶,原理是在图像传感器传输的图片上,没有车辆行驶的图片只会显示相应的车道信息,也就是说能提取完整车道信息的车道将被判断成无车辆车道。而如果在运行车辆的侧后方有车辆,需要测定出侧后方车辆的行驶速度,则通过连拍图像,收录车辆的局部图片,扫描车辆分别出现在图像的哪个位置,运用位置变动计算出侧后车辆的行驶速度,而在连续的照片中,车辆的局部显示越来越靠近图片后方的车辆即为速度较慢的车辆车道,由此则判断出运行车辆两侧无车辆的一侧车道,或侧后方有车辆时行驶速度较慢一侧的车辆车道,进而对自车辆实施换道避撞系统[7]。
在提取侧后方行驶车辆的图像时,应用Roberts算子边缘检测能更好地检测出图像信息,原因是侧位车道噪声较低,而Roberts算子具有定位精度高,对噪声非常敏感的特点,使图像处理效果更优越。
求像素点f(i,j)的梯度值计算式如式(12)。
(12)
设(i,j)代表边缘像素点,THg为边缘阶跃的阈值,则ΓM(i,j)>THg。
利用Roberts算子计算ΓM(i,j)的近似值如式(13)。
P(i,j)=max{|f(i-1,j-1)-f(i+1,j+1)|,
|f(i-1,j+1)-f(i+1,j-1)|}
(13)
最后用式(14)作为ΓM(i,j)的近似值。
Γ(i,j)=|Δxf(i,j)|+|Δxf(i,j)|
(14)
3 车辆弯道避撞控制分析
在设计车辆换道避撞系统中,虽然可以很好地解决车辆在紧急状态下的安全问题,但是并没有将道路的其他状态考虑在内,所以当出现弯道的避撞问题时,需要设定针对无法进行换道时的弯道避撞系统。在车辆的弯道避撞控制系统中,可运用车辆前置摄像头对车道线进行监控,再使用传感器测量出两车实际相距,同时通过特定的安全距离模型计算出车辆的安全距离,用S表示,从而判断出车辆与两侧车辆距离是否在安全状况之内。如果测得的安全距离S大于实际测量距离s,则启动转向换道控制系统[8]。控制器逻辑结构如图4所示。
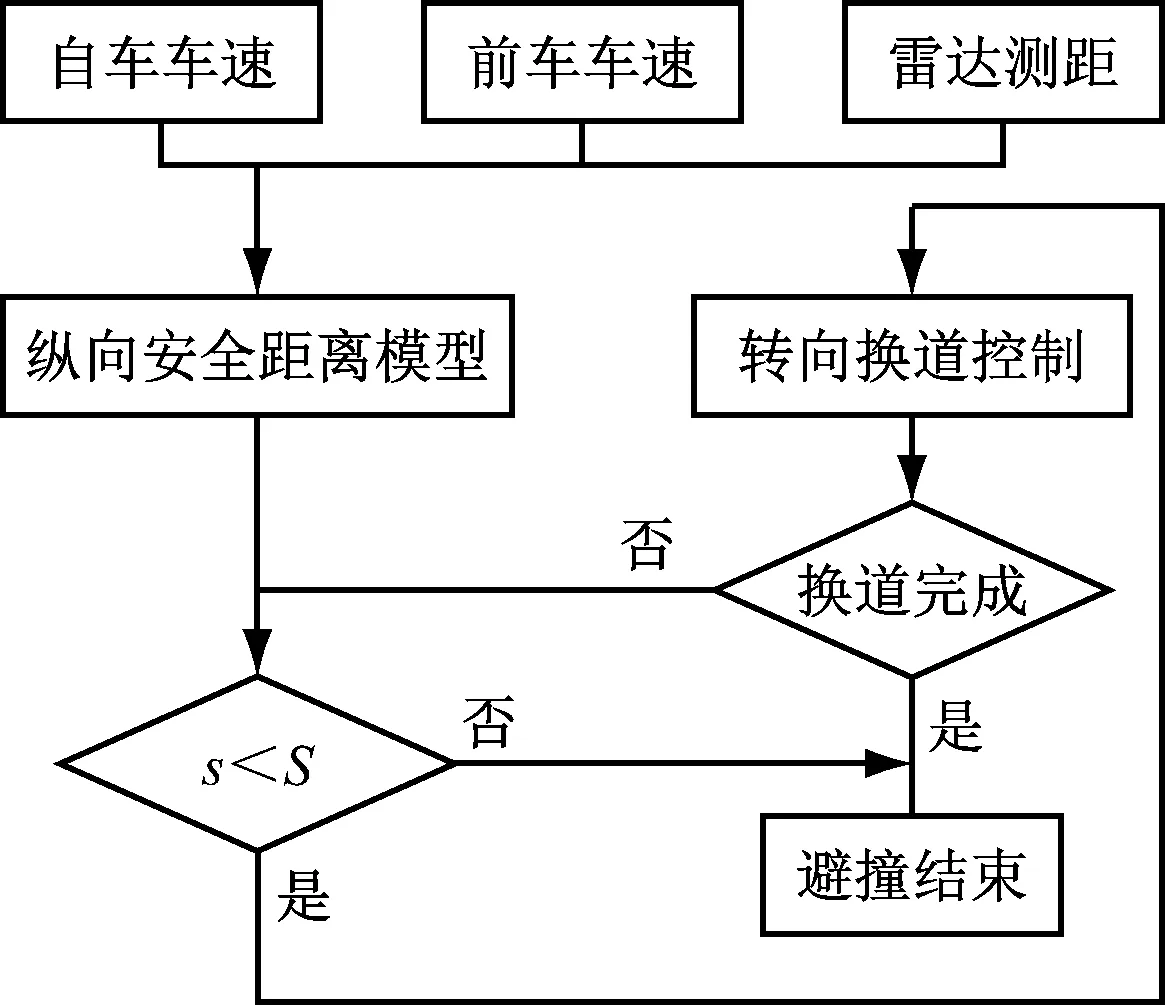
图4 控制器逻辑结构
在运行弯道避撞系统的过程中,因位置变化产生了侧向加速度和在行驶弯道时的向心加速度ac,从而求得避撞系统控制时车辆的实际侧向加速度计算式为式(15)。
(15)
式中,设车辆在行驶时的侧向位移是yd。
通过线性叠加车辆行驶弯道过程中的转向盘转角δ1与运行换道避撞系统时的转向盘转角δ2,得出由转向逆动力学模型计算出的最适合的转向盘转角δ0,如式(16)。
δ0=δ1+δ2
(16)
将δ0与实际转向盘转角δsw进行对比,运用PID做为下层控制器,为了使δsw更好地追踪δ0,适当对PID值进行调整。
4 车辆紧急避撞系统控制方法设计
4.1 安全距离算法
安全距离算法VTH的计算如式(17)、式(18)。
τ=τ1+τ2·νhost
(17)
dsafe=τ1·νhost+τ2·(νhost)2+dmin
(18)
两车之间的时间间隔与本车辆的行驶速度之比为正数。而在式中,τ1、τ2的范围是大于零的常数,其代表的数值不固定,具体因车辆行驶所在的环境变动而改变;两车之间的时距常数由τ表示,τ值的取值在大于等于1 s且小于等于3 s之间;两车间的安全距离为dsafe,单位是m;所在车辆的实时行驶速度为νhost,单位为m/s;dmin为静止状态下两车间距离的最小数值,通常范围在1.5—3 m之间[9]。而由于汽车在行驶过程中受到自身能承受的最高车速νmax所限制,所以表示两车间距的计算式为式(19)。
(19)
因车辆间的相对速度会对车间时距τ产生变化,则在设计VTH安全距离算法时,可运用一个饱和函数sat(·)来代表车间时距τ,如式(20)。
(20)
式中,τ0和τh为车头时距常数,大于0;sat(·)为饱和函数;νr为两车间的相对速度,单位为m/s。
运用这种安全距离算法具有多变性,可更好地适应实际的道路交通情况,充分利用实际道路的特点,将道路行驶安全提高到最佳状态。为车辆紧急避撞系统增加了保障。
4.2 下层控制器设计
首先在整体设计时,由上控制器的最佳加速度和实际行驶车辆的实时加速度组合成为下层控制器的输入,输出时为决定车辆状态的油门控制开口加上制动压力。用PID调制出期望加/减速度ades,作为供给驱动/制动切换模型做判断的上层控制器,接着开启驱动控制模型中的油门执行器或者制动控制系统的制动执行器,使其形成实际控制车辆行驶的油门开度和制动压力,最终让汽车能够以理想的形态运行。标定工况作为汽车的初始速度,单位是km/h,CarSim2016和MATLAB/Simumink两款软件相互配合,首先在MATLAB/Simumink软件中人工设置出5组期望加速度值,加速度数值需要大于-4 m/s2且小于4 m/s2,五组数值可分别为2、1、0.5、-1、-2 m/s2。在多次实验标定参数后,得出最后一组最佳的参数:KP=2.34,Ki=0.5,Kd=0.012。
5 车辆紧急避撞系统测试验证
在拥有较为完整的避撞系统后,为了测试车辆紧急避撞系统的实际效果,对弯道避撞系统进行演示,需要设定一个虚拟的场景进行实验,考验系统的有效性。首先利用PreScan软件构建一个弯道避撞的场景,如图5所示。

图5 弯道避撞场景
为了演示更加贴合实际,假设出具体工况:运行车辆和前车辆共同行驶在外车道,本车辆正在匀速行驶,而前车辆正在实现紧急制动,并在一段时间后停止,同时所在弯道的内车道无行驶车辆[10]。
在前面所述的情境下,使车辆进行避撞系统控制,从而得出本车辆与前车辆的行驶轨迹的图像,如图6所示。

图6 车辆行驶轨迹
两辆车辆的运行轨迹形成一条不规则曲线,在测试之前,运行车辆的初始位置设置在外车道25 m处,而前车在距离本车辆32 m处。
开始后,测试情景为:前车在外车道25—56 m之间行驶时为匀速,与前车辆在相同车道上,某一时刻,前车突然进行紧急制动,而这时,本车辆将运用传感器扫描出与前车的距离缩小,并小于安全距离时,这时开启制动系统已经不能控制两车辆的撞击,则本车自行采取换道行动,进行避撞同时仍然匀速不变继续行驶。从车辆行驶轨迹图中可以看出,在58—70 m之间,本车辆的行驶轨迹出现了改变,这就说明,本车辆正是在此期间进行了换道处理,从外车道转换到内车道。同时,前车在X=66 m时完成了紧急制动,而在整体的行驶曲线上,并没有出现相交点,由此判断出两车没有发生撞击。
6 总结
本文通过了解车辆的智能车监系统和雷达信号器的各项工作原理,对前车运行状况进行分析,在两侧出现车辆的状态下,对车辆进行换道处理,结合图像传感器扫描道路中的其他车辆信息,判断有无车辆行驶,且测量其行驶车辆速度,从而保证车辆与两侧车辆避撞过程中选择最安全的一条转换道路,而在行驶弯道时,通过传感器与摄像装置对前车进行测量和监控,再使用安全距离范围计算式计算实际安全距离,保证在两车相距小于安全距离时,正确启动转向换道控制系统,最后针对车辆紧急避撞系统需要发挥的作用特点,对此设计虚拟场景,进行实验,目的是检测避撞系统的实际应用情况,将避撞系统与实践相结合。
