一种半球谐振子固有刚性轴方位的标定方法
2021-12-06袁立山解伟男奚伯齐王泽宇伊国兴曾庆双
袁立山,解伟男,奚伯齐,王泽宇,伊国兴,曾庆双
(1.哈尔滨工业大学 航天学院,空间控制与惯性技术研究中心,哈尔滨 150080;2.哈尔滨工业大学(鞍山)工业技术研究院,鞍山 114000)
半球谐振陀螺仪(Hemispherical Resonator Gyro,HRG)是一种基于科里奥利效应的全固态振动陀螺仪,具有体积小、精度高、功耗低、可靠性高、机械结构简单等优点[1-5]。谐振子的质量分布不均匀将造成频率裂解,而频率裂解会导致驻波的周期性振荡,从而严重影响陀螺仪的输出精度[6-10]。因此,谐振子的质量平衡对提高振动陀螺的精度具有重要意义[11],而谐振子质量平衡的关键在于固有刚性轴方位辨识,它将为后续离子束调平系统提供谐振子的坐标参数。席翔等人提出并验证了一种基于声学激励的非理想谐振子频率裂解、阻尼时间常数和模态偏移角的测试方法[12]。李绍良等人提出了基于幅频响应特性的半球谐振子频率裂解及固有刚性轴方位角测定方法[13]。陶溢等人提出了一种基于压电电极输出信号检测的杯形谐振子模态偏移角的辨识方法[14]。霍炎等人分析了包含质量缺陷的前三次谐波的半球谐振子在基座剧烈振动情况下的驻波绑定问题[15],此外,还从理论上证明了质量缺陷的第四次谐波将导致频率裂解,且二者基本为线性关系,同时从数学上说明了低频轴即是“重”轴的位置,为后续谐振子的质量平衡提供了理论依据[16]。以上文献从理论上分析了频率裂解和固有刚性轴的成因,并给出了固有刚性轴方位的标定方案,即通过观测谐振子的两个谐振频率的幅频响应曲线,如果其中仅有一个幅频响应的谐振峰出现,则证明激励和检测位置与固有刚性轴方位一致。但是这种测试方法的精度严重依赖于角度搜索步长,且效率较低,需要多次测量逼近固有刚性轴的位置。
针对目前测试方法所存在的问题,本文采用矩阵逼近理论[17],将谐振子的径向振动分解为主驻波和辅驻波,并证明了它们在圆周角和振动相位上的正交性,从而明确了谐振子节点振动即可表示辅驻波这一重要结论,进而提出了固有刚性轴方位的标定方法,该方法仅需要测量两次节点振幅就可以标定出固有刚性轴的位置,极大提高了测量精度和测试效率。
1 质量缺陷半球谐振子的振动分解
质量缺陷的存在会导致谐振子中出现互相成为45 °的双固有轴系,如图1所示,谐振子沿其中每个轴的固有频率都可达到极大值和极小值。固有振动频率较小的本征轴称为“重轴”(刚度较小轴);固有频率较大的本征轴称为“轻”轴(刚度较大轴)[17]。
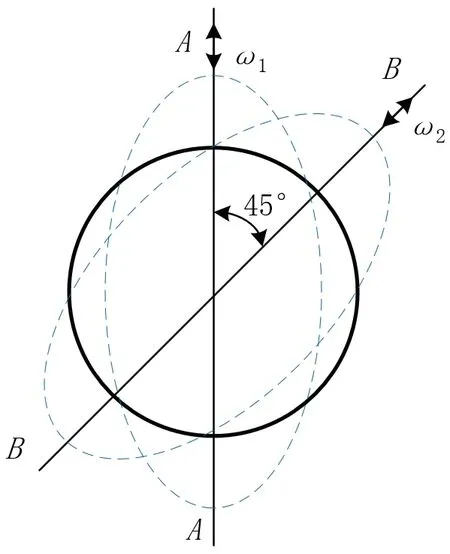
图1 振动本征轴的“重”轴和“轻”轴Fig.1 "Heavy" axis and "light" axis of vibration eigen axis
1.1 质量缺陷半球谐振子的振动模型
质量缺陷谐振子的径向振动可以表示为[17]:
其中,θ为谐振子的圆周角,A为谐振子的初始等效振幅,ω1和ω2分别为谐振子的低频和高频,β4为谐振子的固有刚性轴角。
1.2 矩阵逼近理论
假设矩阵E和F满足下列条件:

其中,E和F是2×2个非零矩阵。
矩阵D表示为:

矩阵D满足下列条件:

其中,

其中,ac,bc,cc和dc是矩阵D的元素。
根据矩阵的运算规则,可表示为:

假设

其中,矩阵E是矩阵D的最佳线性逼近。
假设

如果
则式(8)可以满足。
将式(8)代入式(3),可得:

以上是文献[17]提出的矩阵逼近理论的核心内容。
1.3 质量缺陷半球谐振子的主驻波和辅驻波
设两个偏置频率为:

其中,ω为基准频率。
将式(11)代入式(1),可得:
方程(12)的系数矩阵定义为:
将式(13)代入式(4),可得:
频率裂解定义为:

驻波必须满足下列条件:

质量缺陷谐振子的驻波只存在于以下两种情况:
(1)谐振子的初始振动方向与固有刚性轴重合。
(2)分析谐振子振动的时间t满足Δωt≪1。
除上述两种情况外,detD≠ 0。因此,采用矩阵逼近法对谐振子径向振动进行分解。
将式(13)带入式(8),则辅驻波系数矩阵表示为:
辅助波表示为:

将式(13)带入式(4),可表示为:

将式(18)代入式(20),辅驻波表示为:

令

将式(11)带入式(22)中,可得:

由式(23)可以计算出:

将式(24)代入式(21),辅驻波最终表示为:

同理可得,主驻波的表达式:

质量缺陷谐振子的径向振动最终表示为:
由式(27)可知质量缺陷谐振子的主驻波和辅驻波在圆周角和振动相位上相互正交,这是谐振子固有刚性轴方位标定方法的理论依据。
2 固有刚性轴方位的标定
2.1 标定方案
基于式(27)所得到的结论,设计了固有刚性轴方位的标定方案。
采用两个对径分布的离散电极激励半球谐振子进入二阶谐振模式,而后断开电极激励,使谐振子处于自由振动状态,同时,检测电极测量谐振子节点的振动。φ为检测位置2与固有刚性轴的夹角,测试系统如图2所示。
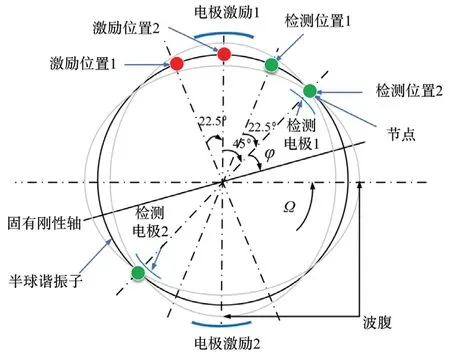
图2 固有刚性轴标定系统示意图Fig.2 Schematic diagram of inherent rigid shaft calibration system
首先,将激励位置1对准电极,电极激励谐振子进入二阶谐振状态,然后停止激励。谐振子节点的径向振幅(检测位置1)可表示为:

其中,t为从切断电源时经过的时间。
将谐振子旋转22.5 °,此时激励位置2与两个离散电极对齐,谐振子节点的径向振幅(检测位置2)可以表示为:
最后,固有刚性轴方位角表示为:
2.2 仿真分析
基于误差缺陷半球谐振子运动方程[4],建立数值仿真系统。仿真参数如下:fp= (0.05+0.05cos2πft) N,f1=4500 Hz,f2=4500.005 Hz,f=4500.0025,τ1=1000 s,τ2=800 s,φ=12.3 °,电极激励时间为20 s。特别明确指出的是该数值仿真模型仅验证固有刚性轴的标定算法在理论上的正确性,不考虑激励电极和谐振子之间的安装误差、检测电极和谐振子之间的安装误差,激励及检测电路的增益误差以及电容的测量噪声。
如图3所示,为检测位置1的等效振动信号及其包络。同理,如图4所示,为检测位置2的等效振动信号及其包络。通过两个检测位置振动包络的比值就可以确定半球谐振子固有刚性轴的位置。在标定过程中且仅需要10 s的测试数据就可以准确标定固有刚性轴的位置,测试效率较高。
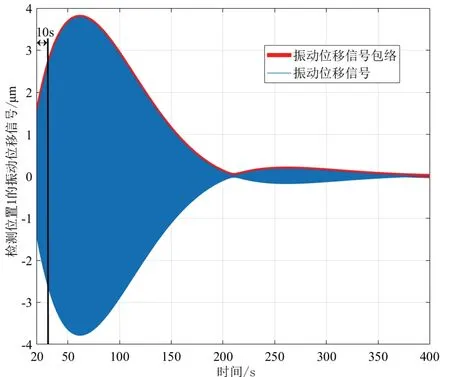
图3 检测位置1的等效振动信号及其包络Fig.3 Equivalent vibration signal of detection position 1 and its envelope
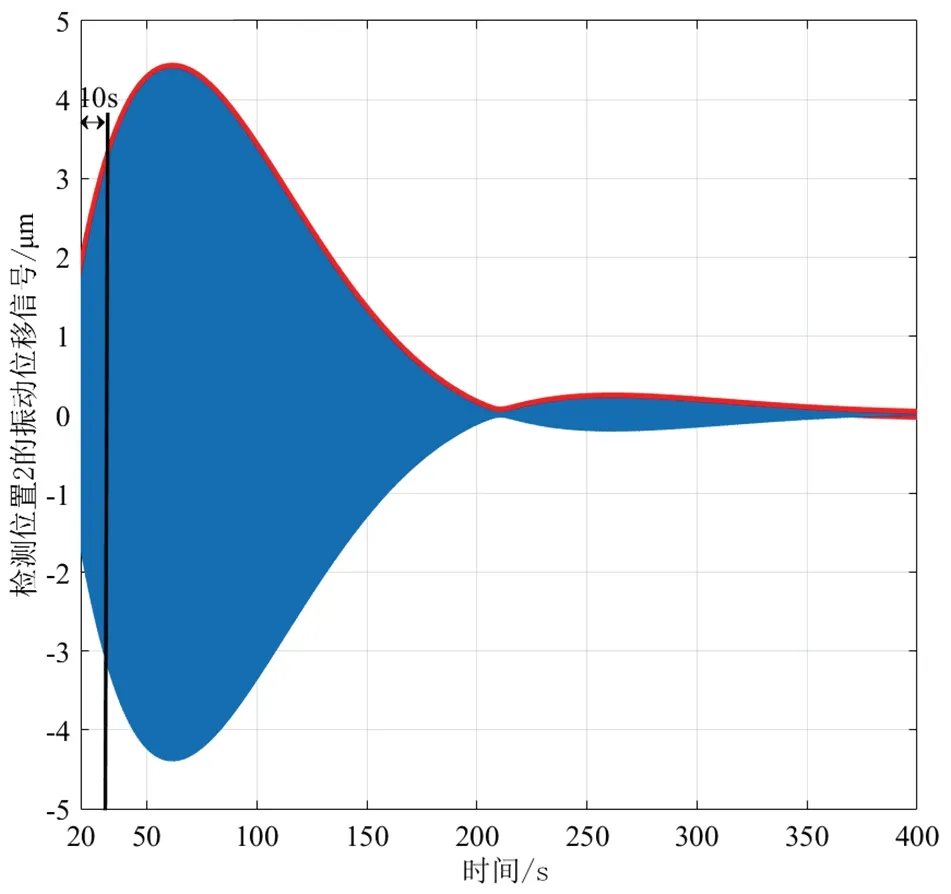
图4 检测位置2的等效振动信号及其包络Fig.4 Equivalent vibration signal of detection position 2 and its envelope
如图5所示,该标定方法在理论上能够准确的标定出固有刚性轴的位置。
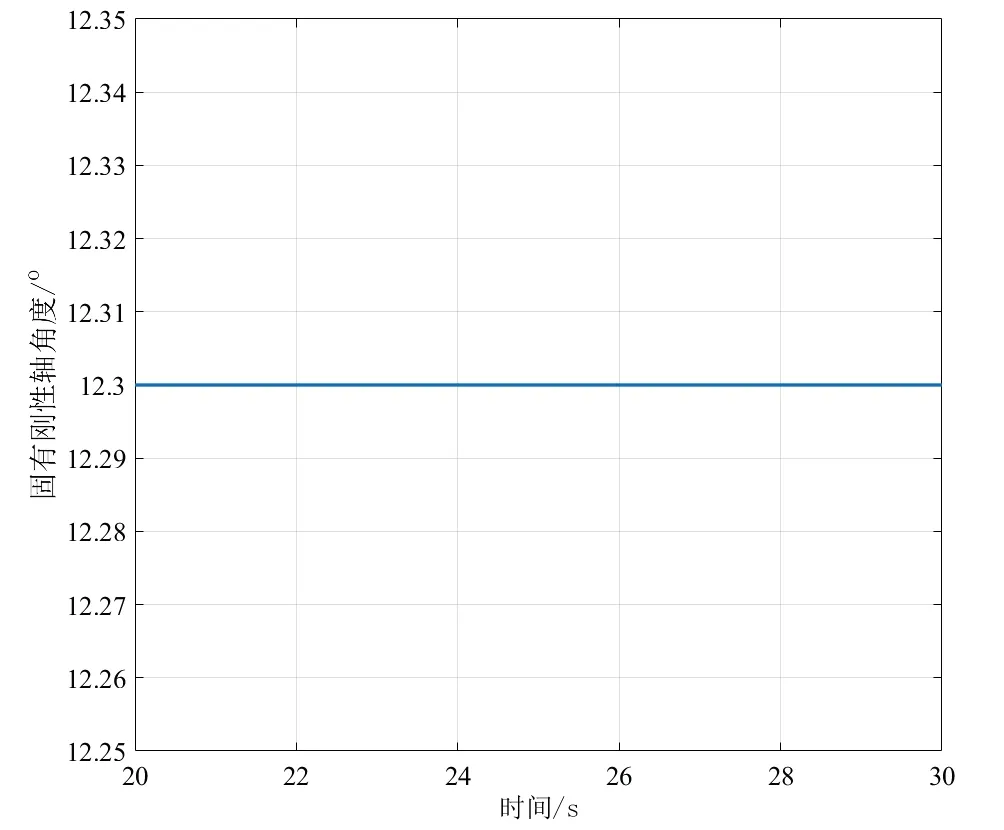
图5 固有刚性轴方位的理论标定结果Fig.5 Theoretical calibration results of inherent rigid axis orientation
如图6所示,该标定算法在理论上具有极高的标定精度,误差在10-12度以内。
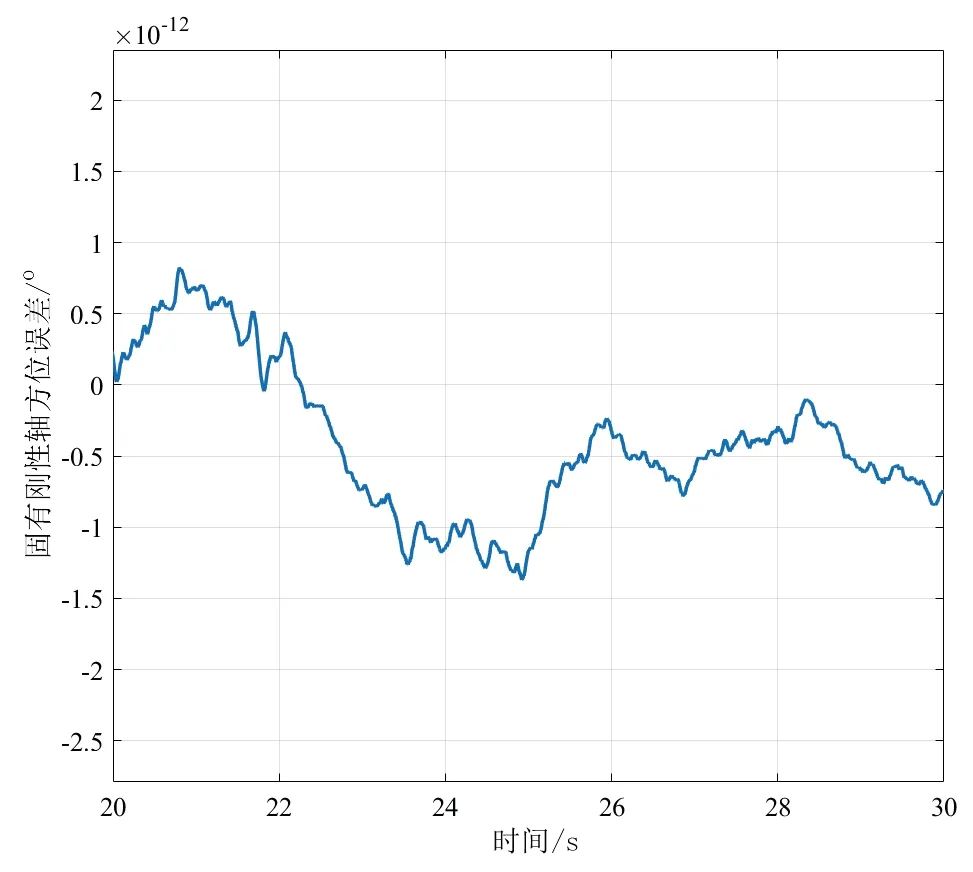
图6 固有刚性轴方位的理论标定误差Fig.6 Theoretical calibration error of inherent rigid axis orientation
仿真结果表明本文所提出的固有刚性轴标定方案从效率和精度两个方面都能达到很好的效果。
3 固有刚性轴标定方案对比
3.1 基于幅频特性的固有刚性轴标定
通过观测半球谐振子的两个谐振频率的幅频响应曲线,如果其中仅有一个幅频响应的谐振峰出现,则证明激励和检测位置与固有刚性轴方位一致。但是这种测试方法存在2个方面的问题:1.针对频率裂解小的谐振子,FFT的分辨率严重依赖于测试时间,例如,谐振子的频率裂解为0.005 Hz,那么FFT的分辨率需要达到0.0005 Hz,那么测试时间将长达2000 s,测试效率较低。2.测试方法的精度严重依赖于角度搜索步长,需要多次测量逼近固有刚性轴的位置。图7展示了固有刚性轴的搜索过程,随着半球谐振子转动,检测位置与固有刚性轴位置越来越接近,谐振子一个振动模态的信号峰幅度逐渐下降,同时另外一个振动模态的信号峰幅值逐渐上升,当检测位置和固有刚性轴重合的时候,FFT只表现出一个振动模态信号峰。
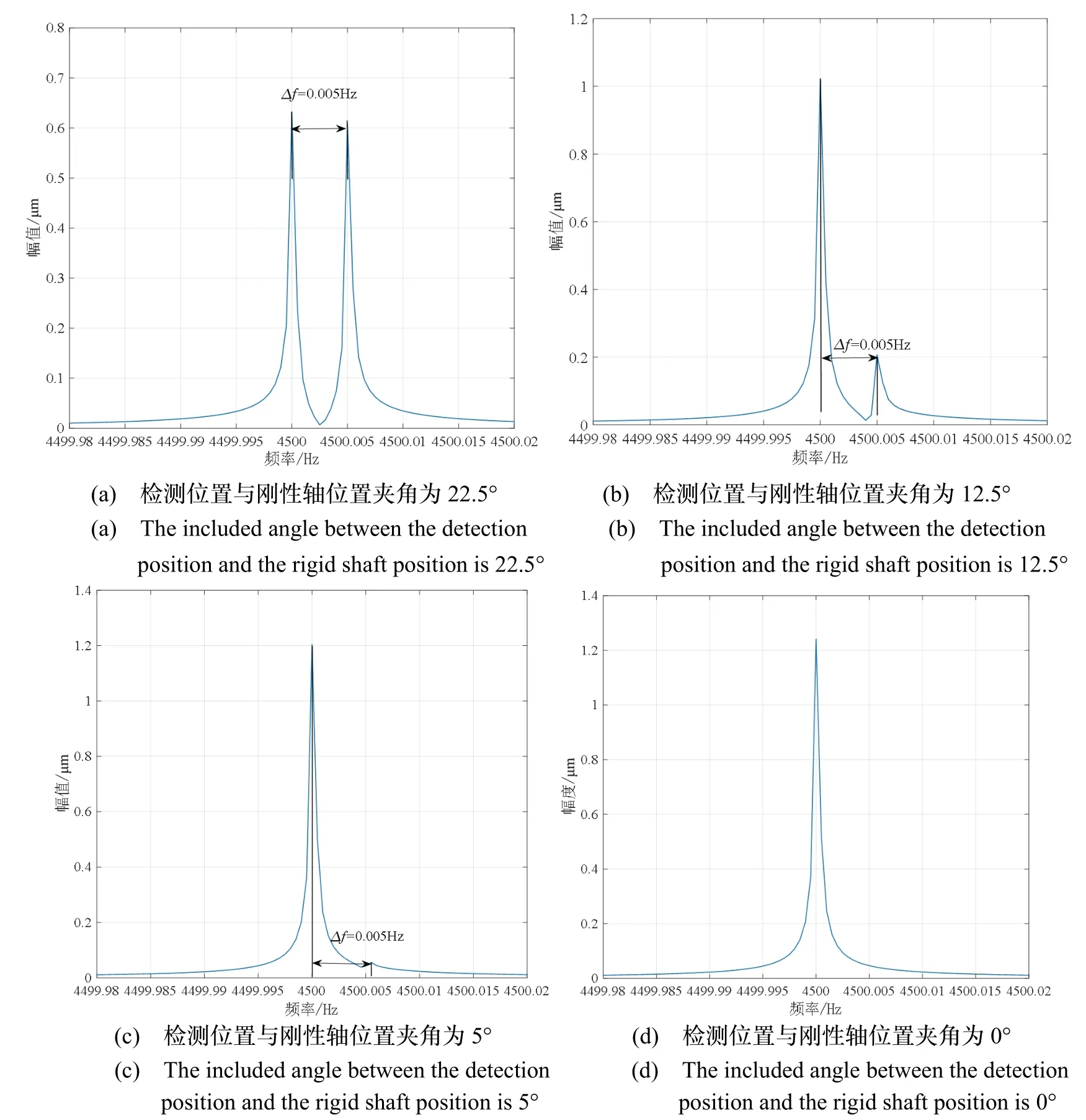
图7 基于幅频响应的固有刚性轴方位辨识Fig.7 azimuth identification of inherently rigid shaft based on amplitude frequency response
3.2 基于振动包络的固有刚性轴标定
振动位移信号包络的上下波动程度反映出了激励检测位置和固有刚性轴角的位置关系,因此通过拟合振动位移信号的包络可以有效进行固有刚性轴角的辨识。但是这种方法对于超低频率裂解半球谐振子固有刚性轴的测试并不适用。例如,半球谐振子的频率裂解为0.005 Hz,一个包络起伏的周期为200 s,为了准确辨识刚性轴角的位置,至少要采集一个半包络起伏的时间,即300 s的测试数据。如图8所示,当激励检测位置和固有刚性轴角未对准时,谐振子的两个振动模态被同时激励出来,通过拟合振动位移信号的包络辨识出激励及检测位置与固有刚性轴位置的方位,当固有刚性轴的位置对准激励检测位置,振动包络将不再有起伏,而是一条单调衰减曲线,此时谐振子仅有一个振动模态被激励。
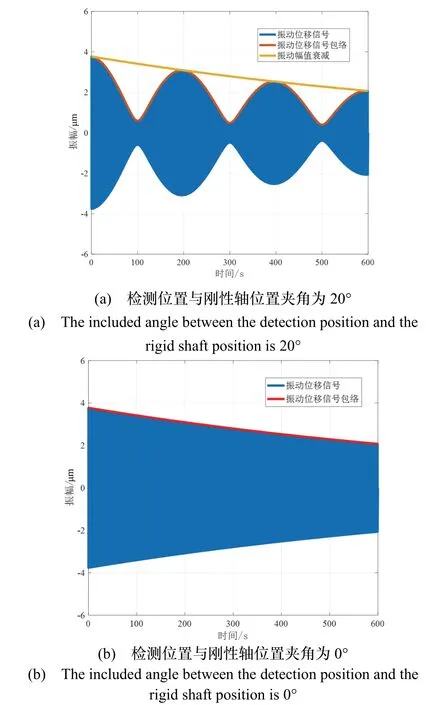
图8 基于振动包络的固有刚性轴方位辨识Fig.8 Orientation identification of inherently rigid shaft based on vibration envelope
4 结 论
本文研究了质量缺陷半球谐振子的固有刚性轴方位的标定方法,基于矩阵逼近理论,将谐振子的径向振动分解为主驻波和辅驻波,验证了主驻波和辅驻波在圆周角和振动相位相互的正交性。在此基础之上设计了固有刚性轴方位的标定方案,即通过两个不同激励位置下谐振子节点振幅比值确定固有刚性轴的位置,其中两个激励位置在谐振子的周向相距22.5 °。最终通过数值仿真的方法验证了该标定方法在理论上的辨识精度可达10-12度,测试时长控制在100秒之内,在测试效率和辨识精度上有着明显优势。
