数据融合下的异步电动机故障诊断 Fault Diagnosis of Asynchronous Motor Based on Data Fusion
2021-11-30商航SHANGHang王炜富WANGWei-fu李雨寰LIYu-huan
商航 SHANG Hang 王炜富 WANG Wei-fu 李雨寰 LI Yu-huan
摘要:随着科学技术的飞速发展,异步电动机在众多行业领域得到广泛推广。尽管异步电动机广泛推广提升了产业效率,促进了社会发展,但其实际应用中会出现各式各样的故障,对人们人身安全构成极大威胁。本文首先阐述了数据融合的内涵特征,其次探讨了异步电动机常见故障,最后论述了数据融合下的异步电动机故障诊断,以供参考。
Abstract: With the rapid development of science and technology, asynchronous motors have been widely promoted in many industries. The wide promotion of landscape asynchronous motors has improved industrial efficiency and promoted social development, but various failures will occur in their practical applications, posing a great threat to people's personal safety. This article first expounds the connotative characteristics of data fusion, then discusses the common faults of asynchronous motors, and finally discusses the fault diagnosis of asynchronous motors under data fusion for reference.
关键词:数据融合;异步电动机;故障诊断
Key words: data fusion;asynchronous motor;fault diagnosis
中图分类号:TP274 文献标识码:A 文章编号:1674-957X(2021)22-0131-02
0 引言
现如今,异步电动机已在众多行业领域得到广泛推广,一旦引发故障,将造成难以估量的经济损失,这让异步电动机故障诊断技术成为广大业界人士研究的重要课题。对于异步电动机的故障诊断,传统诊断方法主要依托单一的故障特征、诊断方法开展,而因为异步電动机结构复杂,引发故障的因素多种多样,电动机在诊断时存在一系列不确定因素,凭借单参数诊断获取的结论并不可靠,诊断结果可信度不足[1]。为此,本文将对数据融合下的异步电动机故障诊断进行思考研究。
1 数据融合概述
数据融合,亦可称之为信息融合,主要指的是依托计算机技术,对按照时序获取的多个传感器或者多源的信息在相应标准下开展综合处理,进一步获取准确可靠结论的信息处理过程。从广义层面而言,数据融合涉及通信、信号处理、模式识别、神经网络、人工智能等多个领域,而数据融合应用的信息技术及处理手段都源自该部分领域。
传统检测系统的工作过程是检测信号经由A/D转换,将数字信号通过简单预处理后传输进计算机中,基于此计算机对系统开展一系列评定、决策,凭借数据融合系统与传统系统的差异性,其属于综合若干个传感器的测量数据,在计算机中对数字信号还应开展进一步融合处理[2]。数据融合过程主要涉及多传感器组、数据预处理、数据特征提取、数据融合计算以及输出结果等步骤。基于此,数据融合下异步电动机故障诊断,属于是一个多元信息处理的过程。因为故障多样复杂,故障征兆主要依托传感器等不同方式方法获取,该种获取的信息一方面具有多样性的特征,另一方面还表现出一定的不确定性;并且,即便是相同类型的故障征兆也可能是各不相同的,而不同类型的故障征兆同时存在相似的情况。针对这一情况,要求相关人员将各项信息基于相应标准开展综合处理,进一步获取准确可靠的结论。
2 异步电动机常见故障
电机故障类型多种多样,依据电机结构划分,包括有转子故障、定子故障、轴承故障等,依据故障性质划分,包括有绝缘故障、短路故障、损伤故障等。现从异步电动机结构着手,对异步电动机常见故障作如下介绍。
2.1 定子铁心故障
作为异步电动机的一种常见故障,定子铁心故障包括有定子铁心松动、定子铁心短路等,其中,定子铁心松动引发原因主要是电机制造时,定子铁心存在压装不紧情况,或者定子紧固件出现松脱情况。出现定子铁心松动后,电机会出现异常振动情况,倘若不进行及时处理,极可能会对绕组绝缘耐久性造成不利影响。对于定子铁心短路而言,因为异步电动机结构特殊,其气隙偏小,受轴承磨损、装配不合理等因素影响,极可能致使定转子相互摩擦,造成定子铁心局部区域齿顶上绝缘失效,并由于毛刺使得片间相互连接,产生片间短路,环路电流不断流经定子膛中铁心短路区域,随着时间的推移,电流不断增大而引发定子铁心局部温度升高,当电流进一步增大后,定子铁心硅钢片将会出现融化情况,同时极可能破坏定子绕组绝缘,最终引发严重的定子铁心短路故障。
2.2 定子绕组故障
电子绕组故障中尤以绕组匝间短路故障最为常见,在电机总故障占比可达到约36%,一般还会引发相间短路故障及局部接地故障。在绕组中一相出现匝间短路情况,如同这一相绕组匝数缩减,进而会使得三相电流不对称。引发匝间短路故障原因的包括有开关浪涌、局部放电、钢绞线振动、匝间绝缘部位化学反应等。相间短路故障通常表现为相间绝缘电阻为零或者趋近于零,引发原因通常为绕组在不良环境下运行过程中,相间绝缘材料不良致使出现电击穿。对于相间短路故障,可通过电机运行声音、定子电流转变、绕组损坏与否等途径进行判定。局部接地故障一般出现于绕组端部或者铁芯槽口部位,通常表现为绕组导体对铁芯的绝缘电阻为零,引发原因主要为电机定子槽口或者绕组端部等部位绝缘材料不良。
2.3 转子故障
转子故障包括有转子断条、转子弯曲等,其中,转子断条作为异步电动机的一个常见故障,在电机总故障中占比可达到约10%,其引发原因主要为制造水平不足,结构设计缺乏合理性,频繁高荷载,人为操作不合理等[3]。转子笼条出现轻微断裂情况,对电机短期影响并不显著,转子断条严重时拆开电机其中转子断条部位会出现明显烧黑情况。所以,对异步电动机转子断条故障开展有效及时的诊断至关重要。转子弯曲通常可分为永久性弯曲和热弹性弯曲,其中,前者指的是转子弯曲后难以复原的情况,引发的原因包括有电机制造过程中转轴结构设计不合理、长期摆放位置不合理、材质选择不符合要求等。后者指的是在热膨胀影响下而引发的转子弯曲,因为该种弯曲可以复原所以亦称之为临时弯曲。一般情况下,在没有超出材料所能承受的温度极限时,等到转子温度均匀后,热弹性弯曲会逐渐恢复;而倘若出现热弹性弯曲后,仍保持电机继续运行,则可能让转子由热弹性弯曲转变成永久性弯曲。
2.4 轴承故障
定子转子在前后两端通过轴承支撑,通常就卧式电机而言,轴承多承受径向力,一般选取滚动轴承,轴承内圈与转子快速运行,在高载荷的影响下,即会引发轴承故障,这一故障主要表现为点蚀、磨损以及内外圈裂痕等,一旦出现轴承故障,将会使得电动机振动加剧,造成振动超标。
3 數据融合下的异步电动机故障诊断
3.1 BP神经网络学习算法
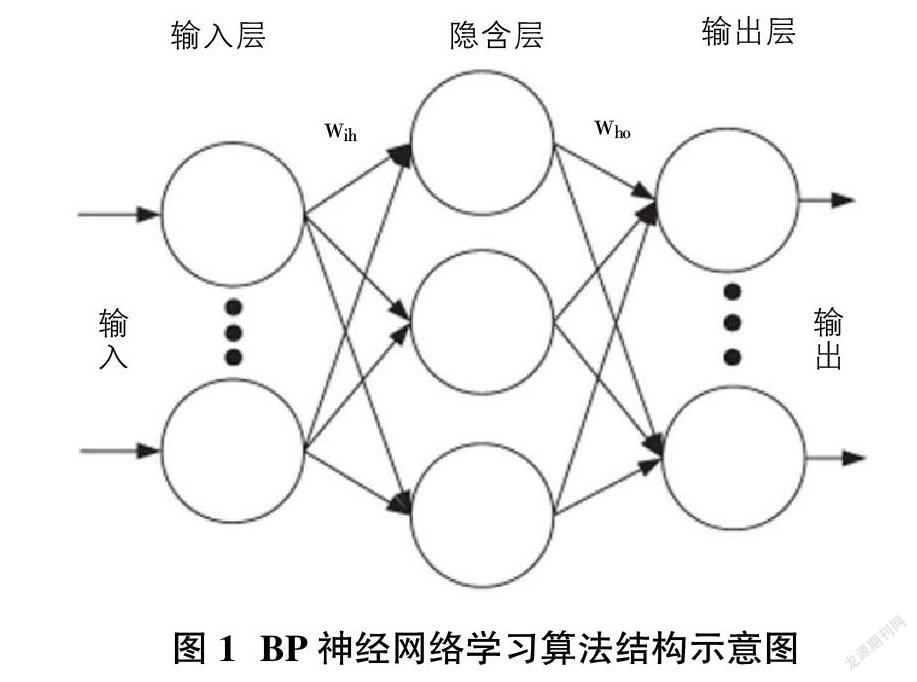
BP神经网络拥有突出的非线性数据处理能力、学习能力,及强抗干扰性等优势,尤为适用于异步电动机故障诊断中故障特征不确定的情况。异步电动机作为一个机电强耦合系统,构建可靠的数字模型存在一定难度。为此,采用神经网络学习算法,可将电机故障诊断转化成一个模式辨识问题,也就是将电机的运行状态划分成正常状态和故障状态,而电机故障包括多种不同类型,对这些电机故障进行诊断的过程就是一个模式识别的过程。BP神经网络学习算法的根本特征在于数据朝前传输,误差朝后传输,如图1所示,同时涉及输入层、隐含层以及输出层。其中,wih指的是输入层到隐含层的权系数,who指的是隐含层到输出层的权系数,BP神经网络在投入应用前应输入相应样本开展网络训练,其中各样本应当与输入向量及期望输出值密切相关,换言之,也就是实现输入数据正向传输、误差的方向调节,对各层次相互间的权系数予以优化整合,一直到实现对误差量的有效控制[4]。网络训练完毕,即可对相关的输入样本,获取误差最小的结论。
3.2 D-S证据理论
D-S证据理论作为一项研究解决不确定性问题的理论,其是基于对各项证据元素的系统考虑,完成对全面辨别框架开展统筹决策的一个准则。通过预先设置一个辨别框架上若干不同证据的信度分配函数,倘若这些证据不相排斥,便可引入D-S证据理论,分析全面辨别框架上各电机故障类型的总信度分配[5]。本次研究过程中,结合各并行BP子神经网络局部诊断的结论,依托D-S证据理论开展全面融合分析,进一步获取准确的故障定位。
3.3 基于神经网络的电机故障诊断
在异步电动机故障诊断过程中,各传感器多点检测会获取各式各样的数据,由各环节获取的故障特征存在不同程度的不确定性。如果将这些高维特征信息同时传输进同一神经网络开展处理,会使得网络训练时间太长,影响故障诊断效果,更可能致使网络输出结果不统一[6]。针对这一问题,将获取特征信息空间划分成若干证据空间,建立相关可信度函数,同时依托证据融合规则,将各项证据整合成一个新证据体,进而得出新的信任区间,最后,依托证据理论,将各证据空间开展全面融合,获取证据融化后的结果,实现对电机故障的有效诊断。
4 结束语
总而言之,依托将异步电动机故障特征向量转化成数据融合问题,通过对BP神经网络学习算法、D-S证据理论等融合应用,一方面可解决因单一故障诊断模型易造成诊断结果偏差的问题,另一方面还可解决证据理论在合成高冲突证据过程中可能出现的失效问题,进一步实现对异步电机故障的有效诊断。
参考文献:
[1]许允之,龚乃玮,葛垚,等.基于信息融合方法的电机故障诊断研究[J].华北电力大学学报,2012,39(03):53-58.
[2]Douglas H,Pillay P,Ziarani A. Detection of broken rotor bars in induction motors using wavelet analysis[C]//IEEE International Electric Machines and Drives Conference,2003(2):923-928.
[3]韩丽,史丽萍.基于信息融合技术的异步电机故障诊断研究[J].中国矿业大学学报,2010(02):178-184.
[4]BENBOUZID M E.A review of induction motors signature analysis as a medium for faults detection [J]. IEEE T ransactions on Industrial Electronics,2000,47(5):984-993.
[5]马东.异步电动机常见故障判断及处理在实践中应用[J]. 数码设计(上), 2019(005):168.
[6]袁媛,方红彬,殷忠敏.基于多数据融合的电机故障诊断方法研究[J].电气传动,202151(09):75-80.
猜你喜欢
杂志排行

内燃机与配件的其它文章
- 纯电动汽车坡道起步防溜系统及控制策略的研究 Research on the Anti-Slip System and Anti-Slip Control Strategy of Pure Elect
- 气缸套网格状激光淬火机床设计 Design of Grid Laser Quenching Machine Tool for Cylinder Liner
- Arduino在汽车CAN通讯中的应用研究 Research on the Application of Arduino in Automobile CAN Communication
- 内燃机零部件结构设计及应用研究 Structural Design and Application Study of Internal Combustion Engine Components
- 汽车智能熄灯保护系统的开发 Development of Intelligent Lights-off Protection System for Automobile
- 基于Workbench的炭罐电磁阀流量特性分析与优化 Analysis and Optimization of Canister Purge Valve Flow Characteristics Based on Workbench