履带车辆双电机耦合驱动机构设计研究 Design and Research of Dual-motor Coupling Drive Mechanism for Tracked Vehicles
2021-11-30袁晴春YUANQing-chun
袁晴春 YUAN Qing-chun

摘要:履带式车辆有较好的通过性能和承载能力,一般应用于工程机械、军事领域和农田作业。由于履带车辆的工作环境非常复杂,若只靠单个电动机或者双侧电动机驱动,在车辆满负载工况时,驱动电机输出牵引功率和力矩无法满足工作要求,会造成整车动力性不足。基于此,本文对履带车辆进行双电机耦合驱动设计和探讨,以改善履带车辆的动力性。
Abstract: Tracked vehicles have good passing performance and carrying capacity, and are generally used in construction machinery, military fields and farmland operations. Since the working environment of a crawler vehicle is very complicated, if it is driven by a single motor or a double-sided motor, when the vehicle is fully loaded, the output traction power and torque of the drive motor cannot meet the working requirements, which will result in insufficient power of the whole vehicle. Based on this, this paper carries out the design and discussion of dual-motor coupling drive for tracked vehicles to improve the dynamics of tracked vehicles.
关键词:履带车辆;电驱动;电机耦合驱动
Key words: tracked vehicle;electric drive;motor coupled drive
中图分类号:U469.6+94 ;文献标识码:A 文章编号:1674-957X(2021)22-0019-02
0 引言
由于石油是非可再生资源,近些年来,随着全球工业的不断发展,使用石油的驱动的内燃机越来越多,内燃机排放的尾气会污染环境,引起全球气候表暖,而且石油也会有枯竭的一天。在这种情况下,电驱动机器成为了当前的研究热点,纯电动汽车、纯电动拖拉机等不断问世,为此,各国也开始制定相关标准和法规,促进纯电驱动履带式车辆的研发。与传统履带式车辆相比,电动履带式车辆具有起步加速快、可实现无级变速、操作简单轻便、震动小、舒适性能好、零污染和零排放等很多优点。基于此,电驱动履带车辆在许多领域的应用不断增长,具有很好的发展前景。
1 电驱动履带式车辆发展概述
电机问世已有一百九十多年,而最早把电机驱动应用于履带车辆的是法国,当时法国研制的“圣沙蒙”坦克,采用的是单电机驱动方式,由于续航里程不到60公里和车型笨重,沒有得到很好的应用。然而,在第二次世纪大战期间,由于战争原因,各国停止了对电驱动履带车辆的研究,当时研究最火是燃油发动机驱动履带车辆,主要是当时蓄电池笨重且不耐用,电子控制技术比较落后,设计出来的电驱动履带车辆行驶里程短,不利于战场使用。到了1984年美国采用双侧电机独立驱动的方式设计出M113步兵战车,改善了单电机驱动中转向困难的问题,德国的LLX试验车也是采用的这种驱动方式,但受当时电机性能的限制,不适合用于重型履带车辆。随着电控技术和单片机技术的快速,油电混合驱动、单电机和转向电机组合驱动在履带车辆上进行了应用,改善了重型履带车辆转向力不足的问题。
我国由于工业体系发展比较晚,直到2004年北京理工大学的孙逢春院士才带领团队对电驱动轻型履带车辆进行了研究样车试验,填补了我国的电驱动履带车辆的空白,近几年来,孙院士团队设计的电驱动履带车辆在某军工厂进行了大量动力分配和能量管理技术方面的试验和布局改进,于此时同,国内高校对双电机耦合驱动技术也进行了大量的理论和仿真试验研究,增加电机耦合机构后使得电机转向功率得到了大大的提升,目前主要应用在电驱动重型履带车辆和小型无人驾驶履带车辆。目前在电驱动履带车辆上应用最广的是感应电机,主要是其转矩特性好、可靠性高、制造成本低,随着电池技术的不断完善,今后履带车辆会得到更好的应用。
2 履带车辆双电机耦合驱动设计
2.1 总体结构设计
本文研究的电驱动履带车辆双耦合动力传动系统示意图如图1所示,是在原有柴油发动机履带车辆的驱动方式及车型上进行的改进设计,主要包括柴油发动机、动力传动箱、油冷式发电机、蓄电池、电机控制模块、左右侧驱动电机、液压操纵动力耦合变速机构、左右侧减速机构和左右侧驱动轮组成,其中驱动电机采用的是交流感应电机,右侧电机的功率比左侧电机的功率要大,左右两驱动电机通过法兰盘与液压操纵动力耦合变速机构的箱体固定,并分别置于箱体的左右两侧。
依据车辆动力来源的形式分类标准进行区分,此种动力驱动方式属于混合动力,因为该车有两套动力驱动系统。在发动机不工作的情况下,由车上的蓄电池给左右两侧电机供电,电机动力通过液压操纵动力耦合变速机构和左右侧减速机构传递到左右两侧驱动轮上,带动履带行驶工作;当电量传感器检测到蓄电池储存的电量将要消耗殆尽时,反馈给柴油发动机的控制模块,使柴油发动机工作,然后发动机的动力通过传动箱带动发电机工作,发电机发的电并入蓄电池充电系统,主要给左右驱动电机供电,多余的电量冲入蓄电池中进行储存,在这种情况下,驱动电机的动力间接来源于柴油发动机,此时发动机的工况不受履带车辆工作环境的影响,此时,柴油发动机可以一直处于最佳工作状态,可以提高柴油的经济效益,控制尾气的排放。
2.2 动力耦合原理
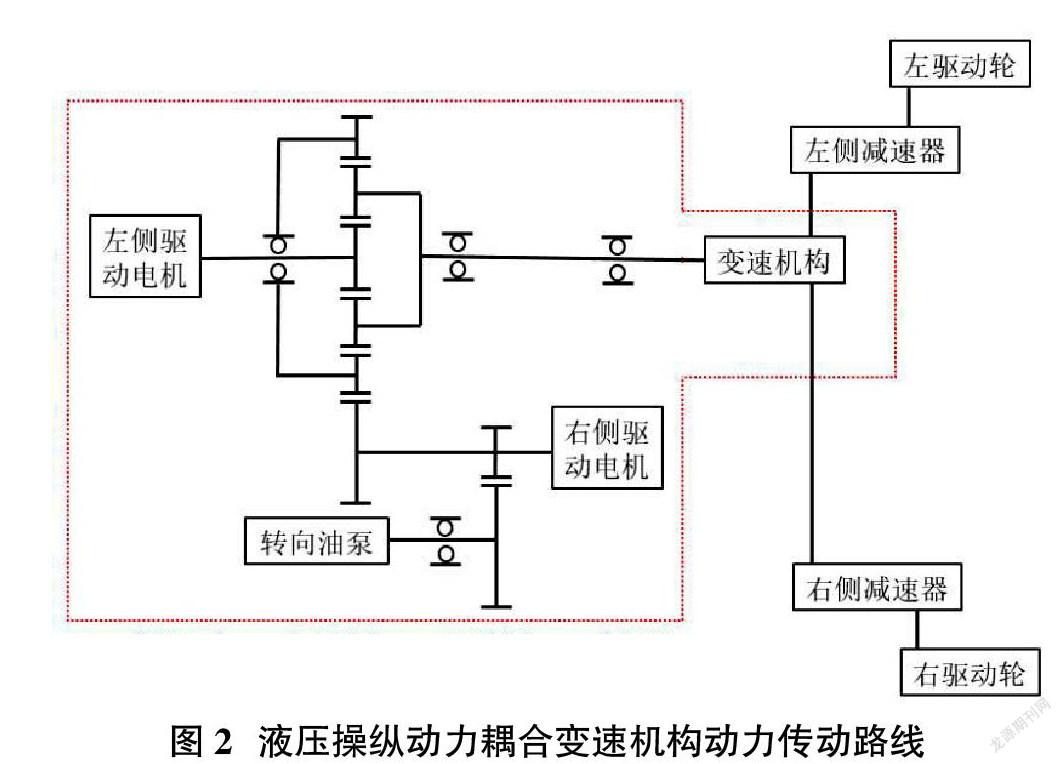
此履带车中的液压操纵动力耦合变速机构的动力传动路线如图2所示,红色虚线框框为耦合动力耦合变速机构,其中变速机构可以通过不同的液压油路控制档位离合器的开闭,从而实现车辆的低速档、高速档和倒挡的位置切换,其中转向或原地中心转向由转向油泵控制。由于感应电机速度调节范围较宽,可以由电机控制模块对左右电机进行无级调速,因此,不需要传统笨重的多档位变速齿轮组,只需要能实现低速档位、高速档位和倒挡的带离合功能的变速齿轮组,从而简化了变速机构的结构。
此液压操纵动力耦合变速机构主要是对左右电机的功率进行耦合,这种耦合方式可以降低左右驱动电机的需求功率和过载系数,从而提高履带车辆的机动性能。此结构中右侧驱动电机通过左侧输入轴上的小齿轮与大齿圈啮合,对动力进行减速增矩后输送到固定齿圈上,右侧驱动电机输出轴设有液压操纵离合器,用于结合、断开大齿圈与右侧驱动电机的连接;左侧驱动电机通过右侧输入轴直接连接太阳轮,当左右侧电机同时工作时,两电机的动力经过大齿圈和太阳轮汇入行星齿轮中,行星齿轮对两动力进行耦合后由行星架输出至变速机构。
2.3 驱动行驶原理
当履带车辆在起步、爬坡和加速时,由于车辆的行驶阻力较大,左右侧电机同时工作,通过电机控制模块控制电机转动方向,使大齿圈和太阳轮流入行星齿轮的动力方向相同,从而实现了动力的叠加,在行星齿轮上把功率耦合放大再由行星架输入变速机构,提高了驱动齿轮的转矩,增大了驱动力。此时左右侧电机输出和行星架转矩、转速关系可以利用传动比进行计算。
当履带车辆转向时,电机控制模块控制左侧电机不工作、右侧电机正常工作,再把换挡控制手柄挂入空挡,此时液压阀门控制右侧电机输入轴上的液压操纵离合器分离,切断了输入行星齿轮的所有动力。右侧电机输入轴上的转向泵可以正常工作,此泵为双向泵,当驾驶员操纵转向拉杆时,可以控制此转向泵正反转动,液压油路经转向泵流入变速机构,使变速机构中的左右半轴实现正反转动,从而使履带车辆进行左右转向,降低了履带内外侧力对电机输出力的影响。
3 动力学计算
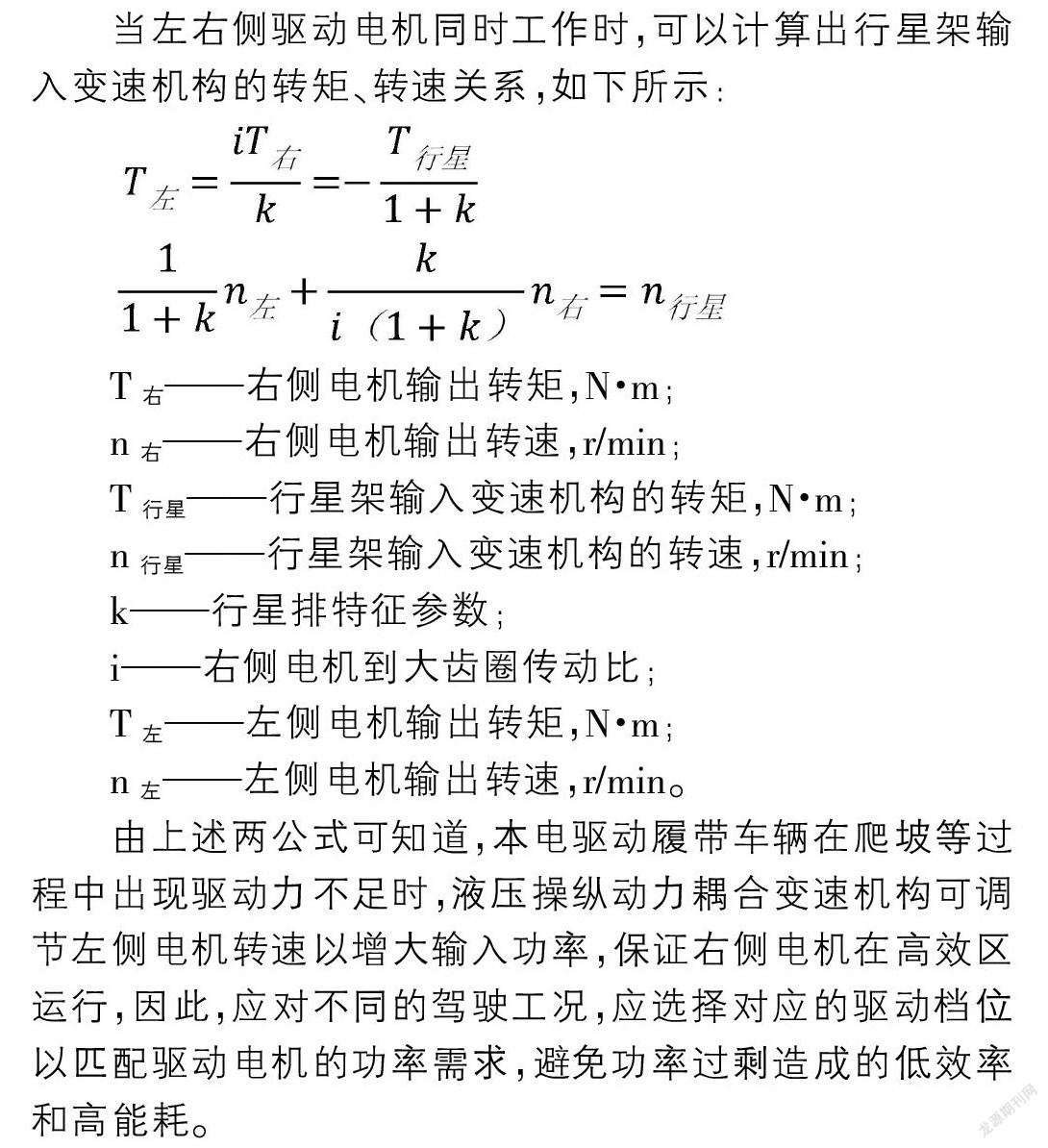
当左右侧驱动电机同时工作时,可以计算出行星架输入变速机构的转矩、转速关系,如下所示:
T右——右侧电机输出转矩,N·m;
n右——右侧电机输出转速,r/min;
T行星——行星架输入变速机构的转矩,N·m;
n行星——行星架输入变速机构的转速,r/min;
k——行星排特征参数;
i——右侧电机到大齿圈传动比;
T左——左侧电机输出转矩,N·m;
n左——左侧电机输出转速,r/min。
由上述两公式可知道,本电驱动履带车辆在爬坡等過程中出现驱动力不足时,液压操纵动力耦合变速机构可调节左侧电机转速以增大输入功率,保证右侧电机在高效区运行,因此,应对不同的驾驶工况,应选择对应的驱动档位以匹配驱动电机的功率需求,避免功率过剩造成的低效率和高能耗。
4 总结
本文在基于传统燃油发动机驱动和双侧独立电机驱动的基础上,结合了两者的驱动特点,设计出一种功率耦合的传动机构,在转向过程中可以通过耦合机构汇流动力,从理论上分析对降低驱动电机的功率过载系数和提高功率利用率具有很好的效果。
参考文献:
[1]盖江涛,黄守道,等.双侧电机驱动的功率耦合机构传动方案设计方法[J].中国机械工程,2014,25(13):1739-1743.
[2]米林,吕希砚,谭伟.双行星排式混合动力耦合机构效率特性分析[J].重庆理工大学学报(自然科学版),2021(4):23-31.
[3]卢存光,段钦华.2K-H型行星轮系的功率流、效率与自锁[J].机械设计与研究,2007(04):39-40.
杂志排行

内燃机与配件的其它文章
- 纯电动汽车坡道起步防溜系统及控制策略的研究 Research on the Anti-Slip System and Anti-Slip Control Strategy of Pure Elect
- 气缸套网格状激光淬火机床设计 Design of Grid Laser Quenching Machine Tool for Cylinder Liner
- Arduino在汽车CAN通讯中的应用研究 Research on the Application of Arduino in Automobile CAN Communication
- 内燃机零部件结构设计及应用研究 Structural Design and Application Study of Internal Combustion Engine Components
- 汽车智能熄灯保护系统的开发 Development of Intelligent Lights-off Protection System for Automobile
- 基于Workbench的炭罐电磁阀流量特性分析与优化 Analysis and Optimization of Canister Purge Valve Flow Characteristics Based on Workbench