RTK技术在无人驾驶中的应用
2021-11-23李新建伍松
李新建 伍松


摘 要:简要分析了RTK技术和自动驾驶技术的发展,其中RTK除从传统自主架设基站模式外衍生出基于网络的CORS系统,通过配合车载方案,可以为自动驾驶提供厘米级精度定位坐标,车速和航向信息,为无人驾驶和车路协同的发展提供新思路。
关键词:RTK 无人驾驶 CORS 车路协同
Application of RTK Technology in Unmanned Driving
Li Xinjian Wu Song
Abstract:In this paper, the development of RTK technology and autonomous driving technology is briefly analyzed. In addition to the traditional mode of setting up base station independently, RTK derives the CORS station system based on network, which can provide centimeter-level precision positioning coordinates, speed and heading information for autonomous driving by cooperating with the on-board scheme providing a new way of thinking for the development of unmanned driving and vehicle-road coordination.
Key words:RTK, unpiloted vehicle, CORS, CVIS
1 前言
随着卫星导航技术和传感器技术的发展,越来越多的定位系统和传感器被使用在传统汽车上,这些技术的融合促使汽车在没有人类操作的情况下也能自动精确定位,感知周边道路信息,进而对汽车行为发出指令,规避障碍,实现自动驾驶。根据美国国家标准技术评价体系ALFUS的测评结构,将自动驾驶划分为0-10级,其中0级为完全人工控制,随着等级提升,人工干预程度越小,环境复杂度越高[1]。精确的定位信息,可以提高自动驾驶车辆的安全性和稳定性。自动驾驶发展的趋势,不仅仅是车辆自身提升环境识别能力,更包含车辆与车辆之间通信,车辆与智能路面的信息交换。车路协同是自动驾驶发展技术突破的关键因素。RTK(Real - time kinematic)实时载波相位差分技术,通过卫星俯视视角,提供实时厘米级车辆定位信息、速度、航向,也可以给出道路地图坐标,在车路协同发展中具有关键性作用。
2 RTK技术原理及发展现状
在日常生活中,GPS定位最为常见,GPS和RTK的区别如下:
GPS是美国70年代开始为军方提供精确授时、导航定位、目标监控的以人造卫星为基础的无线电系统,1994年全面建成覆盖全球98%区域的24颗卫星,目前已经升级到第三代。我们通常所说的GPS是其中的单点定位模式,该模式下的误差通常>1m,有时甚至高达几十米,所以日常驾驶使用的车载导航软件和手机导航软件,无法辨别车道,导致错过道路出口或者无法分辨高架桥梁。这些错误判断在无人驾驶系统中都是极大安全隐患,轻则发生擦碰,重责会引发致命事故并造成交通瘫痪,即使车载传感器探测到周围路况信息,避免了事故,但是错误的地图定位信息也会使目的地南辕北辙。而RTK是卫星定位应用中的一种实时载波相位差分技术,不仅GPS系统适用,其他国家和组织的卫星定位系统也适用。其定义与GPS就存在本质上的差别,不能混为一谈。
RTK定位技术,关键在于使用了载波相位的观测手段,利用基准站和移动站间的空间相关性,采用差分的方式消除大部分误差,从而实现实时厘米级定位精度。
RTK通常由基准站系统,管理控制系统,数据传输系统,用户数据中心子系统等组成。在观测条件较好的情况下,一般5颗卫星就能满足固定解的要求,可用卫星数量越多,定位精度越高,测量结果更可靠。目前全球范围内拥有四种卫星定位系统(GNSS),分别是中国北斗卫星系统(BDS)、美国GPS(Global Positioning System)系统,欧盟伽利略卫星系统(GALIEO)和俄罗斯的格洛纳斯(GLONASS)系统[2]。依托可用卫星系统的迅猛发展,RTK信号也越来越强,全天候全时段的监测的优势愈发明显,打破了时间和空间的限制。各个卫星系统和RTK的关系图如图1所示。
传统RTK通常需要自行架设本地基站又称参考站,由于移动站和参考站之间需要通过电台传输差分数据,因此传输距离一半不超过25km,使用范围有限,且定位误差随距离的增大而增大,并且易受电离层、多路径等因素影响。因此传统RTK也逐渐向着CORS系统发展[3]。CORS(Continuously Operating Reference System)通常认为是一个或若干个不间断运行的,固定的GNSS参考站,利用互联网无线技术,实时向不同用户提供经过检验的高质量GNSS观测值,包括载波相位、伪距等信息[4]。CORS系统理论出现于上世纪八十年代中期,目前CORS發展迅猛,世界上许多国家都建立了不同技术层次和不同水平的CORS系统。相比于传统RTK参考站,网络CORS的模式具有以下优点:
(1)使用范围更广,只要有布置CORS网的区域都无需再自主架设参考站。
(2)精度更高,网络参考站位置固定,且多个参考站之间也会进行误差消除,因此相比传统单点参考站精度更高。
(3)可靠性更强,多个参考站之间可以协同工作,当某个设备发生故障,其他设备依然可以提供可靠定位信息,不会丢失参考站位置信息。
基于CORS系统的网络RTK技术日益成熟,这种高精度高可靠性的技术定位精度相比于传统GPS单点定位有了质的飞跃,相比于传统RTK方式,使用范围更广,系统更可靠,因此也更适用与无人驾驶中高精度定位需求。
3 車载RTK配置方案
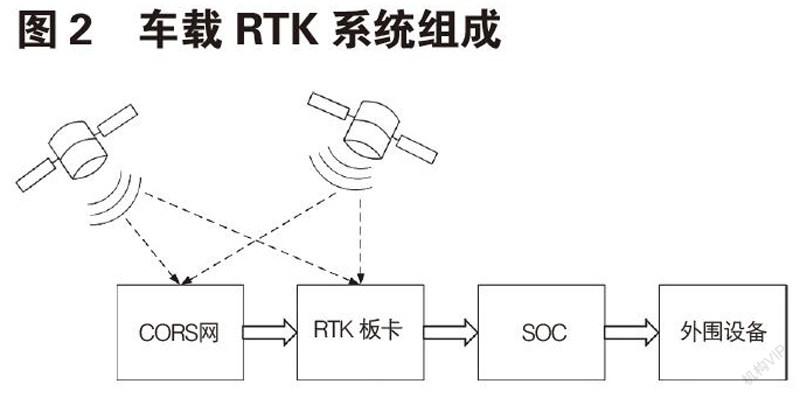
车载高精度RTK通常由CORS网、车载RTK板卡、SOC(System on Chip)和其他外围设备组成,其关系如图2所示,CORS网连续稳定接受卫星信号,给出参考站坐标,车载RTK板卡接收卫星信号的同时也接收CORS网传输的参考坐标,通过差分解算得到实时高精度汽车定位信息,速度和航向等。RTK板卡将这些信息传送给SOC记录解算,再通过外围设备将各个设备组网,就能获得车与车之间,车与路之间的相对位置信息,实现车路协同,为无人驾驶提供准确的参考位置信息。
当前部分驾考培训机构已经实现用RTK进行培训考试,科目二中,考试车压线即可识别,判定考试失败。科目三中,人行横道,公交车站的提示也是通过该技术实现。使用RTK技术的考试车如图3所示,车顶装有天线。
目前市场上国际主流的RTK板卡公司包括诺瓦泰(NovAtel)、天宝(Trimble)、Ublox、国内包括和芯星通、思南等品牌,以思南板卡为例,如图4所示。
CORS服务商有千寻、星舆科技等,虽然各个厂商的软件协议及硬件电路并没有统一标准,但是都能实现厘米级的高精度定位。
除了反应准确的位置信息,还能获得精确的速度和加速度信息,RTK采用的是多普勒频移原理测速,并且通过微分获得加速度值,因此精确度较高。横纵向加速度也是汽车行驶过程中稳定性的重要指标,都可以通过RTK获得。这些信息可以辅助无人驾驶汽车更好的自动操控,在提高安全性的同时也能提升乘坐体验感。
随着技术发展RTK也愈来愈成熟,但是也会存在以下不足:
(1)观测条件要求较高,在密集的高楼,或者隧道中信号强度差,精度降低甚至无法完成作业。
(2)数据链距离影响,移动站和参考站之间的距离增加会增大测量误差,需要架设更多的参考站和电台。
(3)不能达到100%的可靠性,多路径效应,电离层反射等不可控因素,会产生随机误差影响精度。
4 总结与展望
RTK技术可以为无人驾驶汽车提供高精度定位信息,实现车路协同,基于CORS网络的RTK精度更高,稳定性和容错性更强。结合车载各种雷达探测器和传感器使用,使无人驾驶汽车拥有更广阔的发展前景。在现有RTK的基础上引入惯性导航系统,不断修正误差,即使系统短暂丢星失锁,也能保持高精度运作。
参考文献:
[1]孙扬,杨贺.无人驾驶车辆智能水平等级划分[J].科技导报,2017,35(17):80-83.
[2]段廷魁. 全球卫星定位系统(GNSS)在工程测量中的实践运用探索[J]. 科技创新与应用,2021(5):182-184.
[3]李燕军,李永虎,胡敏.浅析CORS网络RTK技术的发展及应用[J]. 甘肃科技,2015(17):13-15,25. DOI:10.3969/j.issn.1000-0952.2015.17.006.
[4]付黎明. 浅析CORS系统在城市工程测绘中的应用[J]. 消费导刊,2018(16):53-54. DOI:10.3969/j.issn.1672-5719.2018.16.057.
