基于RFID技术的文献位置大数据感知方法研究*
2021-11-18张永彩王雪松凌征强
张永彩?王雪松?凌征强
摘 要 论文根据RFID技术工作流程,采用基于频域相位差的感知方法,应用标签阅读器发射不同频率载波信号,信号经过一定距离后被标签接收并反射,阅读器获取反射信号,基于信号相位差确定二维空间中文献目标与标签阅读器间距离。基于二维空间距离感知结果,构建三维空间中标签与阅读器间的距离方程组,利用梯度下降法迭代求解方程组,实现文献标签三维坐标位置数据感知。研究结果显示,该方法的位置感知误差控制在2cm以内,感知过程收敛速度较快,且具有较强抗噪性。
关键词 RFID 图书馆 文献位置
分类号 G250.78;TP391
DOI 10.16810/j.cnki.1672-514X.2021.10.010
Big Data Sensing Method of Document Location Based on RFID Technology
Zhang Yongcai, Wang Xuesong, Ling Zhenqiang
Abstract According to the working process of RFID technology, the sensing method based on frequency domain phase difference is adopted. The tag reader transmits carrier signals with different frequencies. After a certain distance, the signal is received and reflected by the tag. The reader obtains the reflected signal, and determines the distance between the object and the tag reader in two-dimensional space based on the signal phase difference. Based on the results of two-dimensional spatial distance perception, the distance equations between tags and readers in three-dimensional space are constructed, and the gradient descent method is used to solve the equations iteratively, so as to realize the three-dimensional coordinate position data perception of literature labels. The results show that the position sensing error of this method is controlled within 2cm, the convergence speed of the sensing process is fast, and it has strong noise resistance.
Keywords RFID. Library. Document location.
0 引言
图书馆内文献数量大幅提升,以往人工記录文献位置信息的方式无法满足当前文献查阅者高效获取文献的需求[1],尤其是在以文献数量大、访问频率高为特点的高校图书馆内,文献位置记录信息与文献实际位置差距显著[2-3]。为满足文献查阅者需求,使其快速获取所需文献的位置数据,研究一种高效率、高精度、高稳定性的文献位置数据感知方法十分必要。
许磊、夏翠娟[4]从用户信息活动情境和科学合理的应用模式出发,探索情境感知技术融合云计算等其他高新技术在智慧图书馆服务创新中的潜力,构建了情境感知智慧服务系统,提出了第三代图书馆服务平台的元数据管理方法,预测了情境感知服务未来发展的主流趋势,推动情境感知服务继续向个性化、智慧化发展(下文称“文献[4]”)。程时伟等[5]提出基于注视点回忆的眼动数据感知计算方法,通过建立注视点数据误差补偿模型,对用户回忆和提交的注视点数据进行校正,设计并开展了用户实验,提高移动设备上眼动跟踪的精度和效率,满足资源的统一管理与业务整合,实现跨类型的数据流通和知识的组织与融合(下文称“文献[5]”)。文献[4]和文献[5]所运用的数据感知方法对本研究具有借鉴作用,但二者的抗噪性能与感知精度受到应用环境干扰,存在较大局限性,下文将进一步对比分析。
作为非接触式自动识别技术,RFID(Radio Frequency Identification,无线射频识别)技术通过无线射频信号完成数据传输、目标定位与识别,该技术主要应用于产品标志与目标定位等领域,主要优势体现在非视距、精度高、抗干扰、效率快等方面。将其应用在图书馆文献位置感知中,研究RFID技术下文献位置大数据感知方法,提升图书馆文献位置感知精度与效率,可以应对以往研究中的局限性。
1 图书馆文献位置大数据感知
1.1 RFID技术工作流程
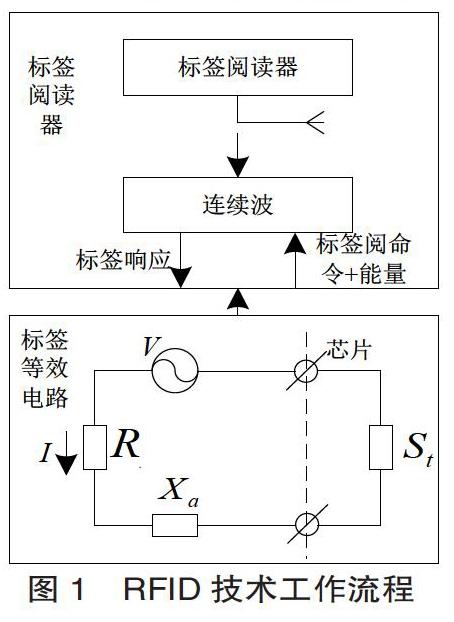
RFID技术由两部分组成,分别是标签阅读器与标签[6]。将RFID技术应用于图书馆文献位置大数据感知中,即将标签置于文献本体上,利用标签阅读器读取标签信息,基于标签信息完成图书馆文献位置大数据感知。图1所示为RFID技术工作流程。
图1内,V和I分别表示标签天线感应电压和电流。用Sa和St表示标签天线阻抗和标签负载阻抗,两者计算过程如下:
(1)
(2)
RFID技术通信链路由前向链路(标签阅读器至标签)与反向链路(标签至标签阅读器)两部分组成[7]。
(1)前向链路。 、Yr-t和d分别表示RFID技术前向链路内阅读器增益、发射功率和阅读器天线与标签天线间距,兼顾图书馆文献位置大数据感知中的多径效应,用式(3)表示标签天线接收功率:
(3)
式中, 、 和Mp分别表示阅读器工作波长、极化失配系数和多径损耗。
利用式(4)表示标签反射系数:
(4)
式中, 。
式(5)表示标签芯片接收功率:
(5)
式中, 和 分别表示标签芯片增益和功率传输系数, 计算过程如下:
(6)
根據式(6),对式(5)进行如下转变:
(7)
用Ytic-sen表示标签芯片灵敏度,若Ytic-r≥Ytic-sen,则标签被激活[8],相反标签未被激活。
(2)反向链路。标签天线反向散射功率如下所示:
(8)
标签利用负载阻抗(St=St1或St=St2)修正确保标签天线反向散射功率有所差异的电磁波,由此实现信息调制。
式(9)和式(10)分别表示阅读器天线和阅读器接收功率:
(9)
(10)
1.2 位置感知算法
根据RFID技术工作流程,基于频域相位差感知二维空间中标签阅读器与标签间的距离;基于二维空间距离感知结果,选取三边测量法感知待感知文献标签三维坐标位置数据。
1.2.1 二维距离感知
根据FRID技术工作流程,利用阅读器发射不同频率载波信号,信号经过一定距离后被标签接收并反射[9],阅读器获取反射信号,基于信号相位差确定文献目标(待感知标签)与标签阅读器(位置坐标已知)间距离[10],具体过程如下。
忽略标签接收至发射载波信号过程所需时间,△t和c分别表示阅读器发射载波信号至接收反射信号过程所需的时间和射频信号在空气中的传播速度,由此得到速度距离表达式:
(11)
用 和f分别表示阅读器载波信号从发射至接收过程中经历的相位和载波频率,引入载波相位法时间频率比对技术,即当相位时间 时,得到:
(12)
由此得到:
(13)
式中, , 和 分别表示载波频率为f1和f2条件下的相位变化值。
1.2.2 三维位置感知
确定二维空间内待感知文献标签与标签阅读器间的距离后,选取三边测量法感知待感知文献标签三维坐标位置数据。
表示三个阅读器同标签间的距离,各阅读器坐标 为已知[11],由此得到:
(14)
在此基础上构建方程即可确定待感知文献标签的位置坐标 。
三维空间内阅读器同待感知文献标签的距离关系可利用下式描述:
(15)
由于标签为公共点[12],依照几何关系能够得到需采用四个阅读器确定位移的待感知文献标签位置数据[13],式(15)被定义为球面方程,由此获取标签与阅读器间的距离方程组:
(16)
至此,可准确获取二维空间中待感知文献标签同标签阅读器间的距离,即获取文献高精度三维位置坐标数据的基础。
若各标签阅读器与文献标签间的距离值均具有高准确性,且标签阅读器设定位置是在图书馆内的不同角落,可避免多个标签阅读器同文献标签处于同一直线上,则式(15)必有唯一解[14]。但实际感知文献位置过程中,标签阅读器同文献标签间的距离计算结果具有一定误差,导致式(16)内的四个球面方程并不一定相交,造成式(15)无解。为解决这一问题,需采用选取梯度下降法,计算使式(15)近似成立的解[15],具体求解过程如图2所示。
在图书馆环境内选定一个待感知文献标签坐标位置,利用式(17)分别确定各阅读器同待感知坐标点间的距离:
(17)
将文献标签同第j个阅读器间的实际距离di和d0i相减,获取误差 ,若 值较大,则对其实施调整,调整过程如下:
(18)
式中, 、 和 分别表示文献标签坐标修正值:
(19)
式中,βx表示x轴的调节速率、βy表示y轴的调节速率、βz表示z轴的调节速率;η0i表示i第个标签阅读器的梯度,待感知标签同四个标签阅读器间的均方根误差可用下式描述:
(20)
迭代上述过程,调整误差值,直至坐标误差满足实际感知精度要求为止。
2 实验分析
为验证本文所提RFID技术下文献位置大数据感知方法的应用性能,选取某高校图书馆为实验点,在其中选取历史资料文献、物理资料文献、英语资料文献和化学资料文献为研究对象,每类资料文献随机选取3个样本。将本文方法应用于该图书馆中文献样本的位置感知中,设定文献位置各方向感知误差阈值为3.5cm(大约两本书的厚度),即当各方向感知误差小于3.5cm时,可满足图书馆文献位置感知需求。本文方法对各类文献样本感知结果如下所示。
2.1 位置感知结果分析
采用本文方法感知各类文献样本位置数据,以物理资料文献样本为例,将其结果与文献[4]和文献[5]进行对比,应用感知过程均方根误差收敛程度测试不同方法的感知效率。测试结果如图3所示。
分析图3可知,本文方法感知文献位置数据过程中,均方根误差以较快速度收敛值最小值,说明本文方法文献位置数据感知效率较快。
将其待感知标签三维坐标和迭代初始坐标分别设定为(24,13,3.6)和(1,1,1),采用本文方法进行位置数据感知,结果如图4所示。图4黑色圆点表示物理资料文献样本实际位置数据。
由图4可知,本文方法感知结果与物理资料文献样本实际位置基本重叠,且重叠程度高于其他文献方法,达到97%,说明本文方法可有效感知图书馆文献位置数据。
2.2 位置感知误差分析
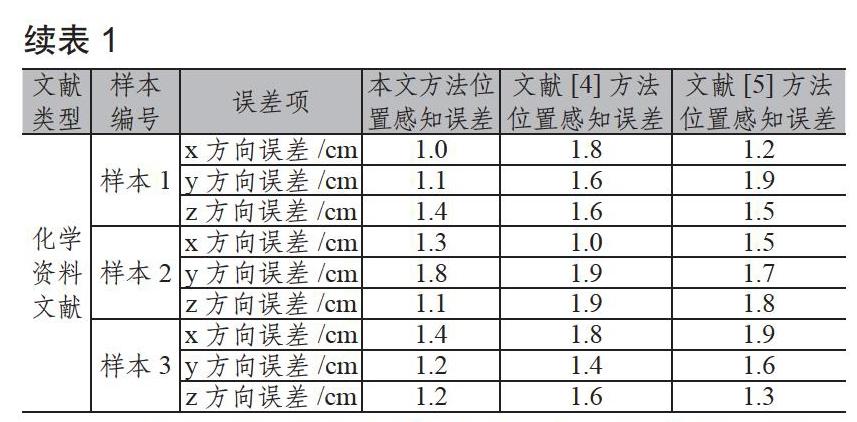
采用本文方法对文献样本位置数据进行感知,所得结果如表1所示。
由表1得到,本文方法针对各类文献样本不同方向位置感知誤差控制在2cm以内,控制效果高于其他文献方法,且显著低于设定误差感知阈值,由此说明本文方法针对各类文献样本具有较高的位置感知精度。
2.3 抗噪性测试分析
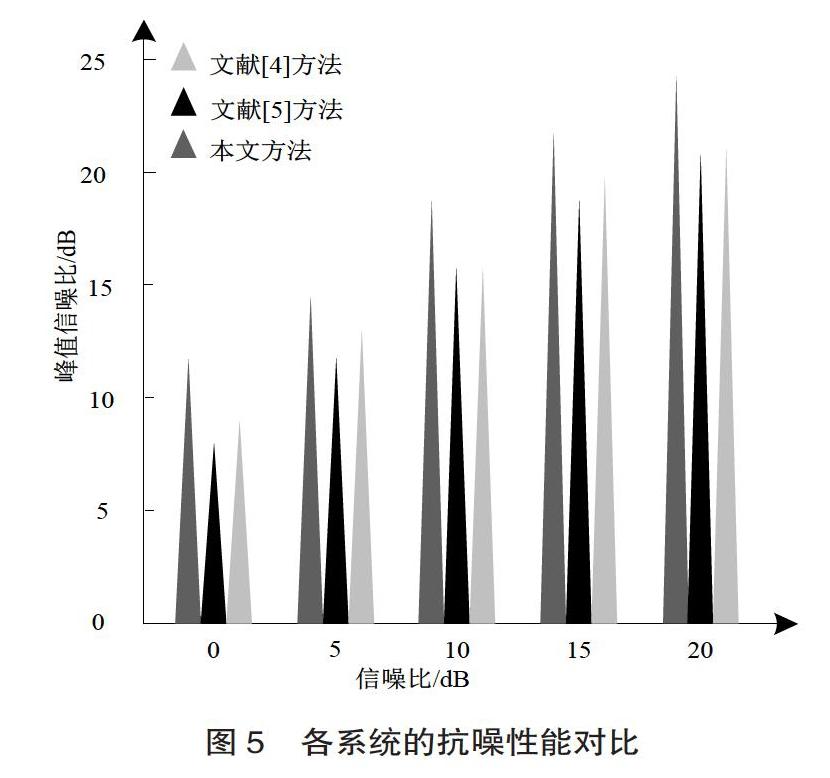
为测试本文方法在各类文献样本位置感知过程中的抗噪性,比较本文方法与对比方法在高斯噪声环境下的峰信噪比,结果如图5所示。
分析图5可知,在各类文献样本位置数据感知过程存在高斯噪声干扰条件下,本文方法与对比方法的峰值信噪比均与信噪比之间表现出线性相关性,也就是峰值信噪比随信噪比的提升而提升。当信噪比一致时,本文方法针对各类文献样本位置数据感知过程的峰值信噪比始终高于对比方法:当信噪比为0dB时,本文方法的峰值信噪比约为12dB,与对比方法相比提升3.5dB以上;当信噪比提升至20dB时,本文方法的峰值信噪比约为24dB,与对比方法相比提升3dB以上。实验结果说明相较于对比方法本文方法的抗噪性能更优。
2.4 定性对比分析
通过整合上述实验结果,将本文方法与对比方法的性能实施效果进行对比,对比结果以高、中、低三个级别表示,结果如表2所示。
由表2可得,影响文献位置数据感知效果的各项指标均显著优于其他两种对比方法,由此说明本文方法整体性能更佳。
3 结语
物联网技术飞速进步,对位置感知服务精度提出更高要求,本文提出基于RFID技术的文献位置大数据感知方法,利用标签阅读器标签之间的距离可以准确、快速感知图书馆海量文献位置数据。在下一步工作过程中,以提升本文方法应用范围为主要目标,主要研究本文方法的可扩展性。
参考文献:
KIM N H . Design and implementation of hadoop platform for processing big data of logistics which is based on IoT[J]. International Journal of Services Technology and Management,2017,23(1-2):131-153.
卫军朝.科学文献与科学数据关联实践研究:以Elsevier为例[J]. 国家图书馆学刊,2017,26(3):93-101.
常飞.以茶文化为例浅析地方文化与高校图书馆特色文献资源库建设的融合[J].福建茶叶,2018,40(9):371.
许磊,夏翠娟. 第三代图书馆服务平台的元数据管理:以FOLIO的Codex方案为例[J].中国图书馆学报,2020,37(1):99-113.
程时伟,魏千景,张章伟,等.移动设备交互环境下的注视点感知计算方法[J].计算机辅助设计与图形学学报,2019,31(1):3-11.
MENG Z, WU Z, GRAY J. RFID-based object-centric data management framework for smart manufacturing applications[J]. IEEE Internet of Things Journal,2019,6(2):2706-2716.
武帅,罗威, 钱旭,等. 基于文献大数据分析的人才创
新能力感知方法研究[J].情报理论与实践,2018,41(12):
41-45.
HUANG R Y , TSAI T Y, WANG H H . Developing an RFID-based tracking system to improve the control of construction surplus soil disposal in Taiwan[J]. Journal of the Chinese Institute of Engineers,2019,42(2):175-188.
WEI N, JIANG D, SI C. Study on an information system integration scheme of enterprises based on RFID technology with SOA[J]. International Journal of Enterprise Information Systems,2017,13(4):1-14.
羅晓兰. 信息技术采纳对图书馆服务变革的影响:基于国内期刊文献的研究进展分析[J].情报资料工作,2018(1):65-73.
COLELLA R, CATARINUCCI L. Electromagnetic design of UHF RFID tags enabling a novel method to retrieve sensor data[J]. ieee journal of radio frequency identification,2018(99):1-1.
REN S, ZHAO X, HUANG B, et al. A framework for shopfloor material delivery based on real-time manufacturing big data[J]. Journal of Ambient Intelligence & Humanized Computing,2019,10(3):1093-1108.
李梓杨,于炯,卞琛,等. 基于负载感知的数据流动态负载均衡策略[J].计算机应用,2017,37(10):2760-2766,2772.
宋维维,夏绍模,李赞.基于SPARK大数据处理平台的图书馆智慧服务探索与实践[J].情报科学,2018,36(6):45-49,56.
何胜,熊太纯,柳益君,等. 基于Spark的高校图馆
文献推荐方案及实证研究[J].图书情报工作,2017,
61(23):129-137.
张永彩 广州番禺职业技术学院图书馆助理研究员。 广东广州,511483。
王雪松 广州市番禺区图书馆网络工程师。 广东广州,511483。
凌征强 广州番禺职业技术学院图书馆副馆长、研究馆员。 广东广州,511483。
(收稿日期:2020-10-27 编校:谢艳秋,曹晓文)
