机器人辅助腹腔镜手术中力感知技术的研究进展
2021-11-18张建勋夏光明
张建勋 姚 斌 代 煜 夏光明
1.南开大学人工智能学院,天津,3003502.南开大学机器人与信息自动化研究所,天津,300350
0 引言
20世纪末期,由于电视内窥镜技术的诞生,腹腔镜手术(laparoscopic surgery,LS)进入了前所未有的飞速发展时代。LS使用细长器械,通过几个直径约1 cm的小切口进入腹腔。外科医生通过插入其中一个切口的内窥镜观察正在治疗的部位,监控手术过程。LS作为开放手术的一种有效替代方法,通过消除大切口,大幅度减小了患者身体的损伤和术后疼痛,缩短了住院时间[1-2]。然而,LS也存在弊端:一是眼手协调性低,手术器械经皮肤表面的小切口进入腹腔,医生的视觉和操作不同向,造成手眼不协调,极易迷失方向感;二是可操作性低,医生因疲劳造成的手或手腕震颤被细长的器械轴放大至器械末端,影响手术质量;三是器械灵活性低,器械大多只有4个自由度,不如人手灵活、准确。随着机器人技术的进步,机器人辅助腹腔镜手术(robot-assisted laparoscopic surgery,RLS)系统取得了长足进展。在临床应用中,许多RLS系统被开发出来,例如最成功的商业手术机器人系统——达芬奇(Da Vinci)。RLS克服了LS的上述不足,RLS系统一般采用主从式结构,视觉与操作同向,眼手协调性高;医生坐在控制台前完成手术,不易疲劳,舒适性更高;医生控制的主手运动经比例缩小后映射到从手的手术器械,操作精度更高;RLS系统的手术器械一般具有7个自由度,比LS的器械具有更多的自由度,可以执行更复杂的手术操作[3]。因此RLS正逐渐成为外科手术的首选方法。
但对于外科医生来说,RLS系统仍然存在一些局限性,其中最重要的是外科医生失去了他们自然的力感知能力[4],迫使外科医生仅仅依靠视觉信息估计力,带来新的手术风险[5-6]。为了提高手术的安全性,RLS系统需要感知包括组织操作(例如抓取、提升过程中的轻负荷转移)、组织移除(例如胆囊的移除)以及组织缝合时的力,以防止用力过度。国内外多项实验研究结果均表明,在RLS系统中引入力反馈技术,能使得手术动作更精细,从而降低接触力峰值和均值,减少无意损伤,提高手术操作的成功率[7-10]。此外,力感知技术也提供了在触诊中检测病变组织的能力[7]。
综上所述,实现精准力感知对提高RLS系统的性能非常关键。本文回顾了研究人员提出的多种技术方案,综述了力感知技术的研究进展。
1 研究进展
在应用于RLS的背景下,除了要求高精度、高稳定性和高安全性外,狭小的空间、潮湿的环境、电磁干扰和多次消毒等也需要考虑进来。从LS的大规模应用开始,到RLS系统逐渐进入手术室,出现了多种力感知技术。根据是否使用了传感元件,将RLS系统中的力感知技术分为有力传感器和无力传感器两大类。
1.1 有传感器的力感知
有传感器的力感知通过在手术器械上设计和安装力传感器实现。常规手术器械力传感器位置一般分布见图1。对于钳形手术工具A,传感器一般分布在①钳爪处、②腕关节处、③体内的器械轴上、④穿刺器处;对于触诊工具B,仅③位置分布有传感器。在RLS系统中,理想状态是测量所有自由度的力,但这会使得传感元件数量较多、传感器结构复杂度升高,因此,前人设计的传感器并非均实现了全自由度的测量。

图1 力传感器分布示意图Fig.1 Schematic diagram of force sensor distribution
本节将力传感器根据原理分为基于电信号和基于光信号两类,分析了设计结构、测量范围、测量精度和电磁兼容性等多项关键指标,并讨论了它们的优势和局限。
1.1.1基于电信号的力传感器
基于电信号的力传感器根据原理的不同被分为基于电阻变化、压电效应和电容变化三类。
1.1.1.1 基于电阻变化的力传感器
基于电阻变化的力传感器是利用半导体材料的压阻效应或者金属材料的应变效应制成的传感器。材料受物理应力会引起检测元件的电阻率或物理尺寸的变化,而电阻的变化是其电阻率和物理尺寸的函数,因此通过测量电路就可以得到正比于力变化的电信号输出。电阻应变计在测力领域具有应用广泛、测量技术成熟和价格便宜等优点,因此最早被应用于RLS系统的力感知技术中。
加拿大康考迪亚大学DARGAHI等[11]设计了一款钳爪,位置见图1中①,并在设计的钳爪上沿轴向粘贴了两个微应变计,用于测量抓取力的大小和位置。靠近钳爪自由端被分为多个区域,这些区域用来描述力的位置。同时研究者设计了电子反馈系统,力的大小可以通过一排发光二极管反馈示出。当夹持力在10 N的范围内时,与有限元模型仿真结果对比,力的大小和位置检测的平均准确率为87%和93%。
美国约翰霍普金斯大学PRASAD等[12]开发了一种具有生物相容性的2自由度力套管,位置见图1中③,承受力的极限为10 N,测量误差不大于6.63%,可以模块化应用到多种5 mm的腹腔镜器械上。在这之后,该大学的FISCHER等[13]开发了一套可以进行3个自由度力感知的腹腔镜夹持器,位置见图1中③。为了提高力感知的敏感性,应变计布置在钳爪经有限元方法分析后的最大应变处;为了不增加夹持器的尺寸,应变计分别布置在两个钳爪上,一个钳爪上布置了惠斯通全桥和半桥来检测两个弯曲力,另一个钳爪上由泊松电桥来检测轴向力。
哈尔滨工业大学LI等[14]提出了用于组织触诊的微型3自由度力传感器,位置见图1中③,结构见图2a。该传感器以可弯曲和压缩变形的三脚架结构为柔性结构,6片定制的应变计分别被粘贴在柔性结构的3根竖梁两侧,用来感知3个方向的力。研究者通过推导传感器的线性特征矩阵,提出了一种考虑灵敏度各向同性的直接几何参数化优化方法,使传感器结构具有较高的灵敏度和足够的刚度。该传感器可以在轴向实现0~3.0 N的力检测,在径向实现0~1.5 N的力检测,测量的分辨率分别是5%和1%。
笔者[15]设计了一款适用于RLS的3自由度力传感器,位置见图1中③。该传感器最大限度地保持了手术器械的完整性,由8片应变计按照一定方式粘贴在体内的器械轴上构成。其中4片应变计沿轴向间隔90°接入两个惠斯通半桥电路以检测两个弯曲方向的力,另外4片应变计构成惠斯通全桥电路以检测沿器械轴向的力。为提高传感器检测的灵敏度,笔者设计了专用的信号放大及采集电路,并对信号进行降噪、滤波和解耦。传感器的径向力测量范围为0~10 N,最大误差不超过3.8%。最近,笔者[16]设计了4自由度力传感器,用于测量3个方向上的力和轴向的扭矩,从应变计的布局、数据采集电路到数据处理方法都较之前的研究进行了优化,使得传感器力的分辨力优于0.02 N。
1.1.1.2 基于压电效应的力传感器
压电效应是指某些电介质沿一定方向受外力而变形时,在其相对的表面上产生电位差的现象。基于压电效应的力传感器正是利用了这种性质,通过对电压的检测实现对外力的测量。聚偏二氟乙烯的压电性被发现之后,得益于其压电常数大、频带响应宽、化学稳定性高等优点,很快被用于RLS力感知技术中。
美国麻省理工学院SOKHANVAR等[17-18]提出了一种压电式力传感器,位置见图1中①,结构见图2b。研究者使用压电聚偏氟乙烯薄膜作为传导元件,在钳爪上设计了一排独立的传感单元,构成传感阵列。这款传感器不仅可以测量夹持力的大小和位置,还可以由夹持力的大小和被夹持物体的变形来推算夹持物体的硬度。研究者使用4种具有已知硬度的材料对该传感器进行了标定,传感器在材料区分和位置检测方面均取得了良好的结果。由于压电式传感元件输出的直流响应差,因此这类传感器无法满足静态负载条件下的使用要求。
1.1.1.3 基于电容变化的力传感器
一般来说,电容器是由两个相对较小间隙的导电板构成的,如果在两块板上施加电位差,则两个极板上会积聚等量相反的电荷。电容式力传感器的工作原理是将被测参量的变化转化为电容器的电容变化,再通过测量电路转化为电量输出。
美国加州大学DAI等[19]提出了一种电容式3自由度力传感器,位置见图1中①,结构见图2c。电容式传感器由3层组成,顶层和底层包含多个电极,中间层使用聚二甲基硅氧烷(polydimethylsiloxane,PDMS)薄膜作为电介质。当夹持物体时,一部分电极的电介质层厚度会减小,这部分电极用来检测夹持力;当执行牵拉或缝合等动作时,另一部分电极的重叠面积发生变化,这部分电极用来检测两个方向的剪切力。通过标定,传感器的夹持力分辨力为0.06 N,两个方向的剪切力分辨力为0.25 N和1.45 N。研究者使用的PDMS薄膜具有良好的弹性性能,并与人体组织和活细胞具有良好的生物相容性;差分电容的配置提高了信噪比和抗扰度,减小了寄生电容和杂散电容引起的误差。
韩国成均馆大学KIM等[20]提出了一种具有5自由度力感知能力的夹持器,可测量器械受到的3个方向上的力、轴向的扭矩和器械的夹持力,位置见图1中①,结构见图2d。两个钳爪外侧均有一个微型3自由度电容式力传感器,传感器主要由印刷电路基板、电容器和柔性结构组成。当钳爪受力时,柔性结构发生形变,使得电容器的电容值发生变化。校准传感器可得每个钳爪所受的3个方向上的力FXu、FYu、FZu、FXl、FYl和FZl。由这6个力矢量和夹持器的夹角并根据几何关系推导出一个变换矩阵,可实现由两个钳爪受到6个力矢量到手术器械所受的5自由度力(FX、FY、FZ、TX和夹持力)的转换。研究者根据电容与受力之间的关系建立模型标定3自由度力传感器,得到0~5 N范围内的平均误差分别为2.6%、2.2%和1.3%。验证实验结果表明,所测FX、FY、FZ和TX与标准传感器相比,其相对误差的平均值分别为8.6%、6.4%、3.4%和5.7%。对于夹持力,研究者对比了它与夹持器夹角的关系,没有给出定量的误差分析。
此外,还有许多研究者进行了基于电信号传感器的研究和开发[21-31],本文将其总结于表1。基于电信号的传感器难以做好静电屏蔽、抗电磁干扰等措施,是这一类传感器固有的缺陷。近年来,随着光纤技术的发展,应用光纤类传感器则可以解决电磁兼容性等问题。
1.1.2基于光信号的力传感器
基于光信号的力传感器依据调制方式的不同被分为基于强度调制和波长调制两类。
1.1.2.1 基于光强度调制的力传感器
强度调制型光纤传感器是利用被测参量与敏感光纤相互作用而引起光纤中传输光功率改变的原理制作的,这类传感器结构简单、容易实现且成本较低,是最早进入实用化和商品化的光纤传感器。
英国伦敦国王学院PUANGMALI等[32]设计了一种用于触诊的微型3自由度力传感器,位置见图1中③,结构见图2e。该力传感器主要由4组光纤(3组传感光纤和1组参考光纤)和1个柔性结构组成。当执行触诊任务时,柔性结构的形变导致传感光纤内传输的光功率发生变化,进而确定接触时的力。参考光纤用于补偿不确定因素引起的光信号变化,例如光纤弯曲、光源内阻或环境温度变化引起的小强度漂移。该传感器可以在轴向0~3 N和径向0~1.5 N的范围内实现力的感知,分辨力为0.02 N。该传感器完全由非金属部件组成,因此可以用于核磁共振扫描。

表1 基于电信号的力传感器总结Tab.1 Summary of electrical signal-based force sensor
意大利那不勒斯大学FONTANELLI等[33]提出了一种将力传感器置于穿刺器末端的方案,位置见图1中④。这种解决方案可以在不改变仪器结构的情况下测量手术器械与环境之间的相互作用力,对不同的机器人平台和手术工具具有广泛的适应性。该传感器使用了4个反射传感元件,沿周向间隔90°布置在圆筒形柔性结构上。传感器原型由3D打印技术实现,可以实现两个弯曲方向力的检测。与标准传感器对比,其误差小于12%。此外,ZEMITI等[34]也做了类似的研究,将一个商用传感器ATI Nano43与穿刺器进行了集成。而实际手术过程中,集成于穿刺器处的力传感器容易受手术器械与穿刺器相对运动的影响,导致测量精度降低。
加拿大康考迪亚大学BANDARI等[35]提出一种简单、小型化具有夹持力感知功能的钳爪,位置见图1中①,结构见图2f。钳爪主要由柔性外壳、基板和光纤构成。用来抓取的柔性外壳固定在基板上,壳体的底面中跨处有一个底面半径为0.5 mm的半圆柱形压头。单模光纤经过压头下方,两端固定在基板上。施加在外壳上的力会通过压头使光纤发生微小的弯曲变形,从而降低光纤传输效率。研究者利用支持向量回归算法对传感器受到的力和光功率关系进行了标定,其平均绝对误差的范围为(0.12±0.08) N。但是该传感器有死区,力小于0.14 N时不能被检测。
1.1.2.2 基于光波长调制的力传感器
波长调制型光学传感器是利用被测参量与敏感光纤相互作用而引起光纤中传输光波长改变的原理制作的。在这类传感器中,具有代表性的是光纤布拉格光栅(fiber Bragg grating,FBG)。与基于光强度调制的传感器相比,这类传感器具有更高的灵敏度,且不受光源强度波动的影响。
德国宇航中心HASLINGER等[36]提出了一种具有6自由度的光纤力/力矩传感器,位置见图1中②,结构见图2g。6个传感FBG和1个温度补偿FBG被完全密封在类似于Stewart平台的柔性结构中构成传感器。负载测试表明,传感器可以承受20 N和15 N·cm的载荷。研究者从噪声、串扰和迟滞方面分析了传感器准确度。此外,该团队曾提出过具有类似结构的力传感器[22],但传感元件使用的是电阻应变计。相比于旧的方案,该传感器具有更好的生物相容性、可消毒性和抗电磁干扰性。
韩国现代重工医疗系统研究部HOSEOK等[37]开发了一种基于FBG的3自由度力传感器,位置见图1中②,结构见图2h。在腕关节处,4根均匀分布的梁构成柔性结构,FBG粘贴在梁表面以感知器械末端的受力。另有4个FBG放置在距传感FBG稍远的位置,与传感FBG一一对应刻在4条光纤中,用来补偿FBG的温度效应。传感器可以在10 N以上工作,分辨力为0.05 N,最大误差是0.1 N,但是由于轴向刚度远大于径向刚度,因此传感器轴向力的测量精度低于径向力的测量精度。
天津大学LYU等[38]设计了基于FBG的触诊力传感器,可以感知器械轴向力的大小,位置见图1中③,结构见图2i。传感器主要由1个柔性体、1根刻有FBG的光纤以及相关的连接器和固定装置组成。柔性结构是一种微型的、改进的并联结构,沿其圆周方向以90°的均匀间隔布置4个柔性支链。光纤的两端被固定装置固定在中性轴上,中部处于拉紧悬空状态。通过仿真优化,传感器具有了良好的力-变形的线性关系和较大的测量范围,实现了0~5 N范围内2.55 mN的分辨力。

图2 用于机器人辅助腹腔镜手术系统中的力传感器Fig.2 Force sensors for robot-assisted laparoscopic surgery system
笔者[16,39]设计了一种3自由度力传感器。该传感器由3条间隔120°的刻有FBG的光纤构成,沿轴向粘贴于手术器械位于体内的器械轴上,位置见图1中③。笔者采用神经网络的解耦方法补偿测量系统中存在的非线性成分,使得传感器在两个弯曲方向和轴向力的平均误差低至0.05 N、0.07 N和0.18 N。此外,考虑到实际手术时手术器械在穿刺器内的移动,笔者对这种移动可能带来的影响进行了理论和实验分析。
此外,还有许多基于光信号传感器的研发工作[40-48],如表2所示。强度调制型光纤传感器易受光源强度的波动和光传输损耗变化的影响,导致测量精度较低。波长调制型光纤传感器克服了强度调制型光纤传感器的缺点,有很强的抗干扰能力,且适合埋入复合材料结构中,便于集成设计。
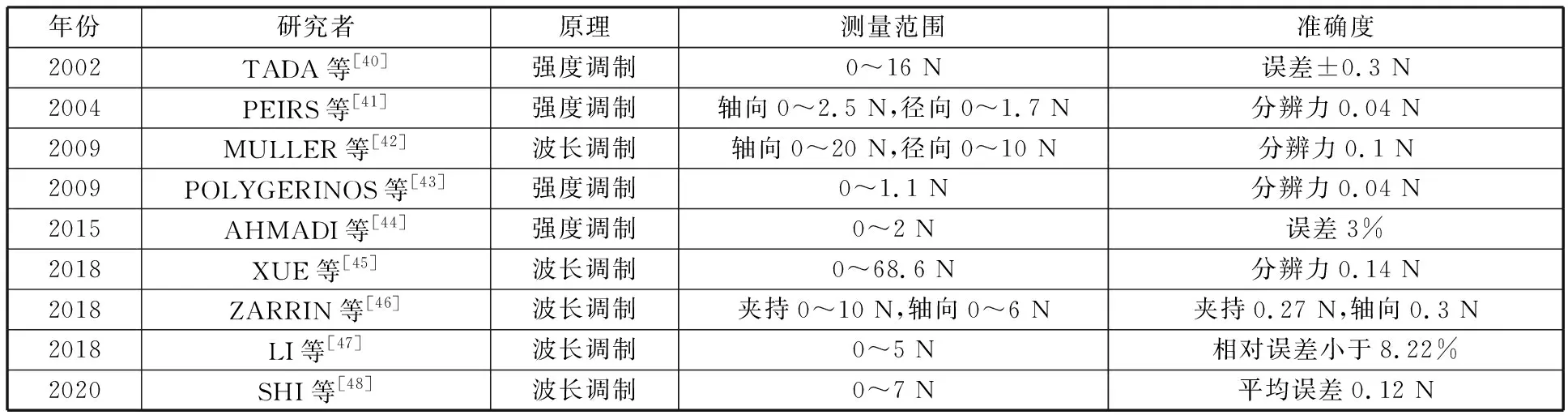
表2 基于光信号的力传感器总结Tab.2 Summary of optical signal-based force sensor
针对有传感器的力感知,根据前文描述,将不同类型的传感器在结构尺寸、测量范围、测量精度和电磁兼容性方面的表现总结于表3。
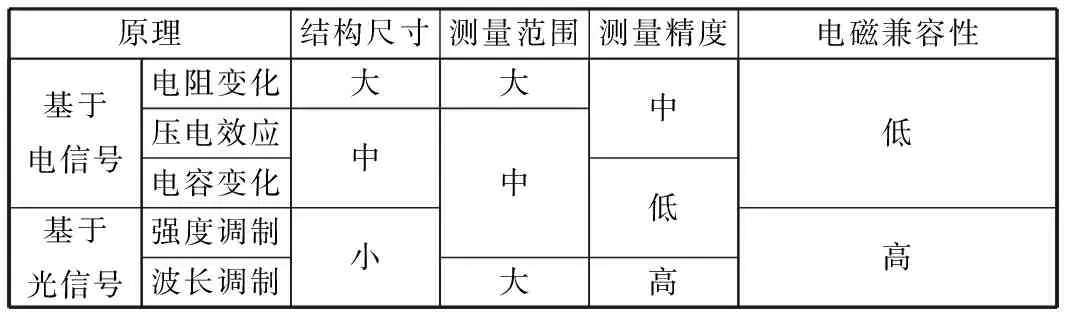
表3 不同类型力传感器的优缺点Tab.3 Advantages and disadvantages of different types of force sensors
1.2 无传感器的力感知
RLS系统中力传感器设计受到苛刻环境的影响和狭小空间的限制,国内外学者已经提出了一些不用传感元件实现力感知的方法。本文将无传感器的力感知分为基于视觉和基于动力学模型两类。
1.2.1基于视觉的力感知
要实现基于视觉的力感知,一般首先需要利用图像在二维或三维的空间上重建组织或器官的变形,然后根据其生物力学特性计算接触力;或者利用视觉信息训练深度神经网络直接输出力矢量。
美国伊利诺伊大学NOOHI等[49]提出使用单目内窥镜图像来估计力的方法,该方法包括器官的变形重建算法和力的估计两步。研究者提出了一个虚拟模板的算法,该算法的应用可以实现对器械末端的跟踪,得到形变中心的近似位置。然后根据由生物力学特性得到的力与形变中心深度的关系,估计出交互力。在器官表面光滑时,该方法可以估计变形方向上力的大小,均方误差为0.07 N。
德国汉堡工业大学GESSERT等[50]研究了一种直接从光学相干断层扫描(optical coherence tomography,OCT)图像中估计力的新方法。OCT扫描头用于捕获感兴趣区域的图像体积。首先获取组织没有发生形变的体积作为参考体积,然后获取组织发生形变的体积作为当前体积。参考体积和当前的体积样本量都被输入一个被训练过的三维卷积神经网络(three dimensional convolution neural network,3D CNN),它预测作用在组织上的力矢量。力的估计完全基于图像,与执行运动的机器人系统无关。使用该方法的平均误差为(7.70±4.3) mN,单次3D CNN的处理时间为(16.9±1.3) ms。对比前期依赖于从表面重建或表面提取获得形变的方法,该方法具有更高的精度。这表明用OCT捕捉皮下组织体积可以被学习到更丰富的特征,但是需要针对特定的手术工具和组织类型进行3D CNN的训练。
在早期,基于视觉的力感知是分步进行的,首先是利用目标区域的视觉信息重建其变形的大小和深度,然后根据目标组织或器官的弹性特性将变形的大小和深度与作用力结合起来。这种方式中变形重建策略的设计和优化对最终结果有至关重要的影响。而目前,基于视觉的力感知大都采用深度神经网络进行学习和标定,输入为连续的图像序列,输出的结果为最终的力。深度神经网络一般包含卷积神经网络层及其变种或循环神经网络层(recurrent neural network,RNN)及其变种,它们分别用来提取变形特征和记忆变形的变化趋势。为提高力感知的精度和实时性,样本的数量和有效性以及网络的结构和优化方式都需要合理设计。人体内环境中视野的清晰度和目标与非目标组织或器官的粘连程度都会对基于视觉的力感知产生重要影响。由于基于视觉的方法所建立的模型普遍可解释性差,因此模型的鲁棒性是决定这类方法能否从实验室走向临床应用的关键。
1.2.2基于动力学模型的力感知
基于动力学模型的力感知一般利用机器人上驱动电机的电流、电机的位置、电机的速度和电机的加速度中的一个或几个参数,并结合具体的操作机械臂建模分析。
美国华盛顿大学ROSEN等[51]开发了一种根据位置测量力的技术,可以测量遥操作中的夹持力。在从手端驱动夹持器的扁平线圈驱动器、编码器和比例微分控制器形成一套伺服系统,主手端配置相似的控制结构。在操作过程中,夹持器尖端位置将与主手控制产生的参考输入进行比较。如果在抓取组织时检测到位置误差,则将其标定为抓取力并反馈给主手。由于力是根据两个位移测量值的差来估计的,因此误差较大。
天津工业大学SANG等[52]提出一种基于动力学模型的外力估计与实现方法。研究者通过对病人侧操作臂机械结构和驱动机构的深入分析,建立了线性参数化的动力学模型,并推导了外力的估算公式。在具体实现上,利用达芬奇手术系统工具包接口函数中的关节位置、关节速度和关节力矩完成了动态参数辨识实验和外力估计实验。通过对数据的离线分析,3个方向上力的均方根误差分别为2.29%、3.19%和3.35%。
在基于动力学模型的力感知中,早期有一些基于运动学的方法仅利用位移和力的关系建立简单的模型。这种方式在感知静态力时因其计算复杂度低和稳定性高而优势明显。根据牛顿运动学定律可知,由持续性的手术操作所造成的动态接触力使这种简单的基于运动学的方法不再适用。要实现基于完整的动力学模型的力感知相对复杂,需要解决的问题包括机构描述、运动学分析、动力学建模和动力学参数辨识等。机构描述和运动学分析可以根据欧拉角、四元数、Denavit-Hartenberg(DH)矩阵、旋量法、李群和李代数等理论完成。机器人操作臂动力学方程的非线性和强耦合性使得对它的动力学建模较为复杂和困难,目前以牛顿-欧拉及拉格朗日或以这两种方法为基础的动力学建模方法应用最为普遍。动力学参数的辨识流程涉及参数的独立性处理、关节运动轨迹规划以及辨识算法的选区等过程。在实际的力感知需求中,加持力的感知只有一个自由度,相对容易实现,接触力的反馈涉及多个自由度,实现起来更为复杂。
此外还有许多无传感器力感知技术的研究[53-63],本文将其总结于表4。无传感器力感知能解决手术器械的消毒、尺寸和电磁兼容性等有传感器力感知存在的问题。基于视觉的力感知利用了组织的生物力学特性和组织变形,一般仅能感知一个方向的力,且精度受环境影响较大。对于基于动力学模型的力感知,一些因素(如关节处的摩擦、传动丝中的摩擦和机构间隙)会对其精度产生不利的影响。
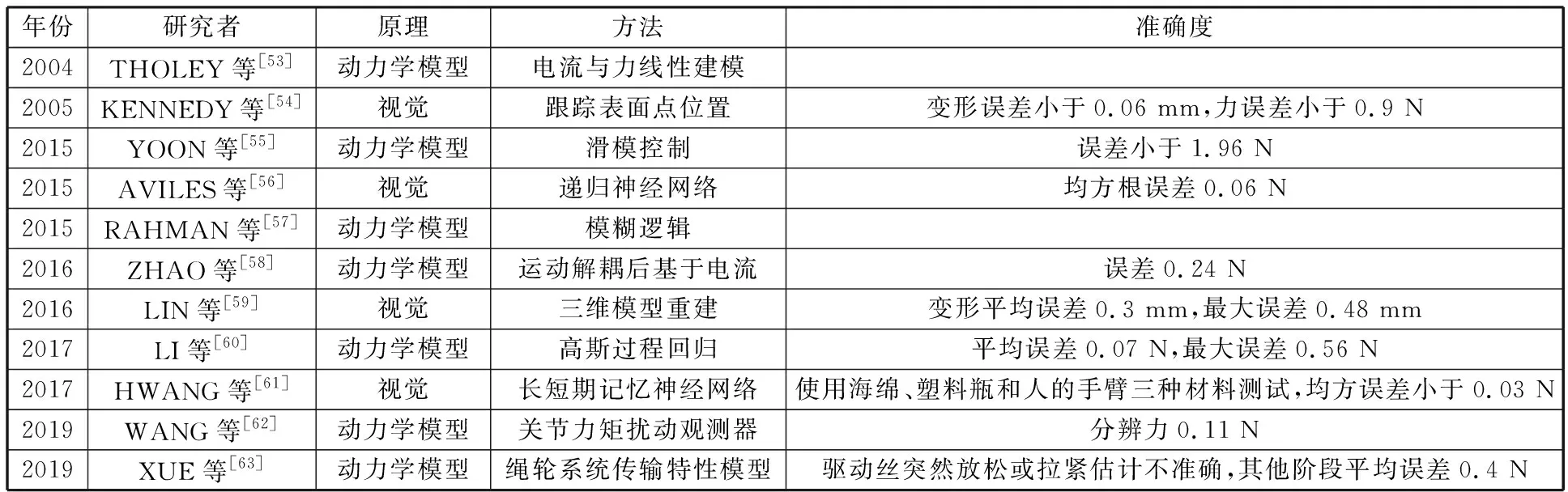
表4 无传感器力感知总结Tab.4 Summary of sensorless force sensing
2 现状分析与发展趋势
RLS的出现和迅速发展体现了外科手术的发展趋势——精确和微创。力感知作为一种重要的反馈机制,对手术机器人的发展起着关键作用。力感知能力的缺失,使得RLS、机器人辅助骨科手术,机器人辅助心脏外科手术和机器人辅助眼科手术等不足以胜任复杂的动作和操作。目前,其他类型的机器人辅助手术中仍以有传感器的力感知为主要研究方向。机器人辅助骨科手术力传感器一般安装在机械臂与持钻工具之间,该位置空间较大,对传感器的尺寸设计要求较低。而在机器人辅助眼科和心脏外科手术中由于末端器械较为细小,对传感器尺寸要求高,因此查阅到的文献中均采用基于光信号的传感器。在机器人辅助手术中,由于末端工具的不同和所要测量力信息的差别,力传感器的尺寸、形状和量程都有明显的区别,但实现的原理与设计所用的方法在多种机器人辅助手术中类似。目前,力感知技术的研究还处于实验阶段,要想应用于临床仍需进一步研究。
对于有传感器的力感知,光纤传感器的应用会越来越广泛。光纤传感技术的发展使传感器不仅尺寸减小,而且具有灵敏度高、电绝缘性高和生物兼容性好等优点。FBG传感器是最具影响力的光纤传感器之一,单条光纤刻入多个FBG节点解决了测量力的维数和引线复杂度之间的矛盾,有利于传感器的小型化和减少传感器引线数量,有效地促进了RLS系统中力感知技术的临床应用。目前,光传输效率受光纤弯曲影响较大,使得在尺寸较小的柔性结构布置单条光纤的多个FBG节点存在一定的技术障碍。随着材料科学的进步,生产工艺水平的提高,光纤传感器的可弯曲半径会不断减小。
对于无传感器的力感知,精度问题是其应用的主要障碍。基于视觉的力感知一般使用深度学习架构,属于数据驱动方式,这意味着需要大量的训练数据,并且无法很好地感知没有学习过的环境,但硬件计算能力的提高和深度学习的发展使得使用机器提取特征来表示数据成为可能,这将进一步增强基于视觉的力感知的鲁棒性和准确性。对于基于动力学模型的力感知,从手主动关节的动力学模型和动力学参数辨识均会带来误差。但随着机械加工工艺的提升,机器人关节加工精度会更高,机构间隙对动力学模型的影响也会更小。对动力学参数进行辨识时,可通过选取更优异的辨识激励轨迹并考虑系统的强非线性,设计并采用更合适的参数辨识方法来提高精度。
目前,人工智能的发展赋予了无传感器尤其是基于视觉的力感知巨大的潜力。如前文所述,有传感器和无传感器两类感知方式均有优势和局限。解决好数据融合问题,同时利用这两类感知方式冗余和互补的特性来提高力的检测精度和稳定性,也可能会出现在未来的研究中。
3 结论
本文回顾了现有的有传感器和无传感器力感知技术。通过分析其各自的实现方式、优缺点和技术障碍,在归纳和总结这两类技术的现状的基础上,展望了未来的发展趋势。随着机器人辅助腹腔镜手术系统中力感知技术的发展,外科手术的安全性和效率将会越来越高。
