仿生双足机器人步态轨迹自适应控制方法研究
2021-11-17柳秀山
柳秀山,张 琴,程 骏,蔡 君
(广东技术师范大学,广东 广州,510665)
1 引言
仿生双足的步态控制是目前足类机器人行走控制中技术难度最大的,需要解决多阶数、高耦合,和复杂约束等难题[1],但是由于仿生双足机器人的类人行走拥有高灵活、低功耗、低自由度等优势[2],使得其在很多场合具有重大的实用价值,比如翻越障碍、楼梯行走、攀爬斜坡等。由于实际行走过程中,地面状况非确定且动态变化,当运动腿和地面碰撞,或者步态发生振荡时,如果控制方法不能有效处理碰撞振荡,对步态轨迹进行合理控制,很可能使机器人姿态失衡,严重的将发生跌倒。当前关于仿生双足机器人的步态控制研究的重点是行走稳定性[3-4]。其中大部分基于模型分析、目标优化,以及步态参数调整三方面。文献[5]构造了正逆运动模型,并在模型分析基础上引入目标优化策略;文献[6]摆脱了对模型精确度的依赖,主要利用目标优化与参数调整,使机器人保持姿态稳定;文献[7]构建了机器人的混合动力模型,引入混沌处理结合反馈信息实现步态参数的自适应控制;文献[8]基于模型得到状态和动作空间,利用episode指导Ape-XDPG进行学习控制。文献[9]在模型分析基础上,设计了包含质心轨迹、脚步落点、转动角度的指标评价,并结合QP算法计算参数。在建模分析方面,倒立摆由于具有和双足行走类似的多阶耦合特性,已成为现有模型分析的主流方法,由于存在运动腿的惯性力矩,该模型需要考虑腿部质量影响。本文也是基于倒立摆建立仿生双足机器人的步态模型,在求解质心投影点的时候,引入重力与惯性的合力抑制运动腿引发的抖动。在目标优化方面,主流方法大多针对步态稳定与能量消耗,本文在这两种指标基础上做了优化,并补充了速度控制目标约束,从而改善机器人的行走速度和灵活性。在步态参数调整方面,现有研究通常以自主决策、快速响应为目的,本文设计了自适应控制方法,并采取周期间的相位差异进行偏差调整。这里集合了模型分析、目标优化,以及步态参数调整三个方面的优化处理,从步态轨迹控制的各个环节进行性能改善。
2 仿生双足机器人步态建模
2.1 人体步态模型
为了使仿生双足机器人在行走时具有与人类更加接近的步态控制,这里针对人体行走过程中的步态进行分析。利用质心与零力矩点的位置变化,将人体步态周期看做由三种状态组成。图1描述了人体行走时的步态情况。在人体行走的过程中,当人体的质心投影始终落在支撑范围中,不存在转动力矩的作用,此时即为静态平衡阶段。当质心投影越过支撑范围,但是零力矩点依旧位于支撑范围中,此时即为动态平衡阶段。当质心投影与零力矩点都越过了支撑范围,则此时为动态非平衡阶段。其中,动态平衡阶段是步态平衡控制的核心。

图1 人体行走步态
人体行走是关于质心、动量,和力矩等参数的复杂过程。考虑到大多数关节运行都处于矢状面中,所以,这里重点进行矢状面中参数的剖析。在一个步态周期中,质心角动量具有时变特征。它的变化量大小为质心受到的所有力矩的累加和。假定人体的质心为C,其中某体段i的质心为Ci,对应体段i的质量为mi,加速度为aCi,于是质心角动量的时变特征可以描述为

(1)
其中,RCi表示Ci对应的角动量波动率。如果重力和惯性的合力在地面反力的延长线上,此时人体处于动态平衡;如果重力和惯性的合力没在地面反力的延长线上,此时将形成转动力偶。为了计算人体受力,需要得到地面反力延长线在地面的投影点。而当处于动态平衡阶段时,质心投影点近似等于反力延长线在地面的投影点,质心投影点的位置计算为
(2)
其中,LCx、LCy、LCz依次表示质心在x、y、z方向上的绝对位置;FFx、FFy、FFz依次表示重力和惯性的合力FF在x、y、z方向上的分量。在动态平衡阶段,人体质心C位于合力FF上,同时FF的方向受aC影响。由于质心角动量的变化量等于外力矩的大小,且方向相反,所以质心角动量在空间中的波动情况为
(3)
根据所有体段的对应参量,通过累加计算出人体质心角动量RC,公式为

(4)
其中,LCi、vCi、ICi、ωCi分别代表Ci的空间位置、线速度、惯性和角速度。
2.2 仿生双足机器人步态模型
引入倒立摆建立步态模型,模拟人体行走状态。当摆的一端在运动的过程中,如果能够施加合适的加速度,便能够保证其处于稳定状态。这里利用重力和惯性的合力在零力矩点处的关系,得到质心投影点的位置如下
(5)
其中,x、y、z依次是质心在空间中的位置;g是重力加速度。当零力矩点的移动速度维持不变,根据质心投影点位置求解微分,得出质心在空间中位置如下

(6)
其中,vx、vy分别代表质心在空间x和y方向上的速度分vx量,计算公式如下

(7)
通过质心的位置和速度计算,就可以求解出倒立摆的运动状态。机器人在每次行走的过程中,其步态存在一定的周期特征,即任意两次行走应该具有相同的初始速度,据此,利用一个步行周期便可以得到初始速度,进而得到机器人步态轨迹。对于任意脚步落点的位置,可以利用如下公式计算

(8)

3 步态轨迹自适应控制
3.1 目标约束
为了实现步态轨迹自适应控制,这里对仿生双足机器人行走过程中,影响其步态性能的因素进行目标约束分析。当机器人行走速度变化时,步态的稳定性应该保持稳定,尤其是快速移动情况下,必须保证步态的协调可靠,因此,这里首先对步态稳定性采取约束设计。假定采样周期是Ts,则稳定性约束函数描述为

(9)
其中,k表示步数;L′x、L′y表示本次采样周期内质心的期望位置。E1(x)值应该尽可能小,从而确保步态轨迹与期望轨迹尽可能贴合。其次,考虑到行走速率受步长、周期的影响,在稳定性约束基础上,补充速度控制约束
(10)
E2(x)与速度成反比关系,所以E2(x)值也应该尽可能小,从而获得更好的步态灵活性。最后考虑机器人行走的能量约束,图2描述了仿生双足机器人步态周期内关节转角情况。在行走过程中,驱动关节转动是能量的主要消耗。根据关节转角模型,无论处于哪种步态阶段,机器人的上身重心线保持和支撑面呈90°,而髋关节保持和质心具有相同的运行轨迹。这里采取加速度方式对能耗进行改善,目标约束如下
(11)
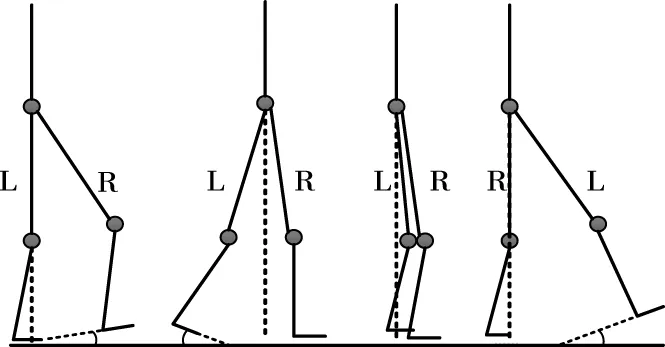
图2 步态周期关节转角模型
所有的目标约束都是搜索最小值,但是对它们的搜索处理会存在冲突,难以同时满足约束要求,于是,这里将评价函数综合描述为
Emin(x)=[E1(x),E2(x),E3(x)]
(12)
此时,在x的有效范围内,求解出最小的目标向量即可。
3.2 自适应算法
利用参考轨迹对机器人的步态控制进行自适应整定。即在机器人任意步态周期内,需要根据当前真实的步态轨迹信息计算出后续的参考轨迹,整定过程如下

(13)

(14)
Δd(t)描述了相邻周期轨迹参数的相位差异,在f(t)与fr(t)方向一致的情况下偏差才具有实际意义,否则认为无偏差。将Δd(t)采取积分时间均值处理,得到轨迹差值如下
(15)
其中,Δt为积分时间。通过改变Δt,可以实现对自适应速度的调整,Δt越小,调整速度越快。但是Δt与前述整定因子一样,都不能调节过度,超过目标约束范围的调节将会导致机器人步态振荡。
4 仿真研究
利用Matlab搭建双足机器人行走模拟平台,Python实现步态轨迹自适应控制算法。仿真模型设置参数如表1所示。初始化步态周期是1.2s,其中双足同时着地受反力作用的时间约占20%,重力加速度g取值为9.8m/s2,算法整定参数λ1、λ2、λ3取值依次为0.6、0.55、0.5。
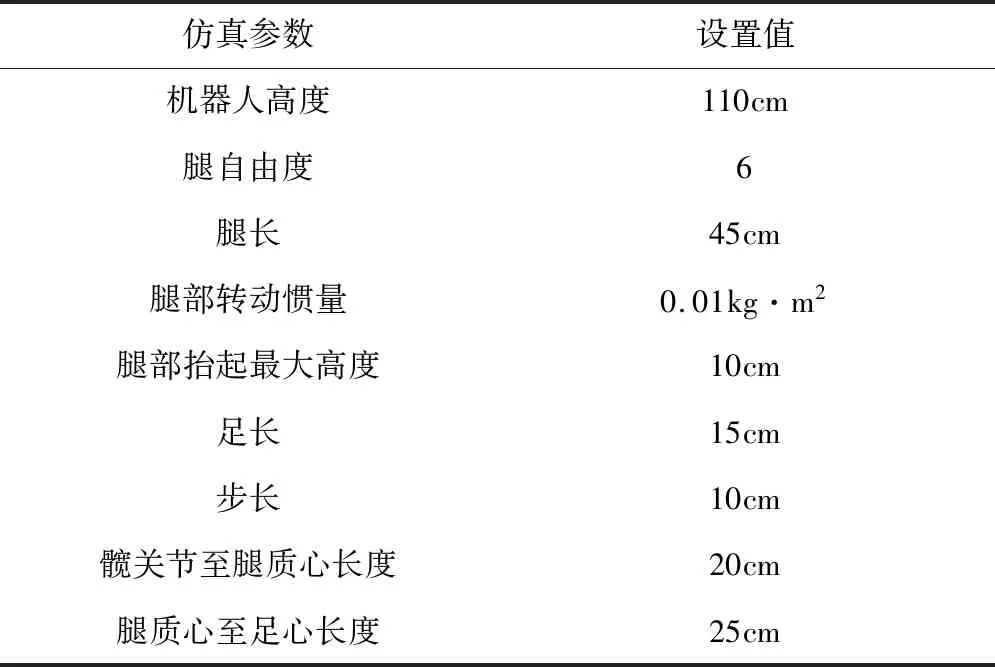
表1 仿真参数设置
仿真过程中,从模拟仿生双足机器人平地起步开始,在步态达到稳定后,施加一段上坡路段。记录整个过程中双足机器人的角速度和作用力矩变化情况,结果如图3和图4所示。从机器人的角速度曲线来看,起步时因为能量近似等于不动点能量,所以需要经历一段调整时间才能达到步态稳定状态,但是可以看出,在步态轨迹自适应控制方法的作用下,经过大约三步即达到步态稳定。在第7s开始进入上坡路段,角速度出现了短暂的振荡,但是调整了三步后依然快速达到步态稳定状态。同时可以看出,不管在起步阶段还是初始爬坡阶段,机器人的角速度与步长都较稳定状态时小,这有利于步态稳定的控制,避免步态振荡甚至发生跌倒。从机器人的作用力矩曲线来看,起步时需要大力矩提高机械能,所以第一步的力矩明显较大,之后随着步态的稳定趋于零。在进入爬坡阶段时,也需要提高作用力矩获得更大的机械能,所以第一步的力矩也较大,在步态稳定后作用力矩也降低并趋于稳定。通过角速度与力矩实验曲线分析可知,本文的步态轨迹自适应算法能够快速调整机器人的行走步态,使其达到步态稳定,同时对于力矩的控制能够有效降低系统能量消耗。
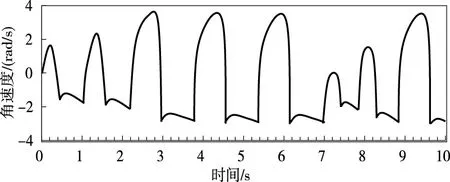
图3 角速度实验曲线
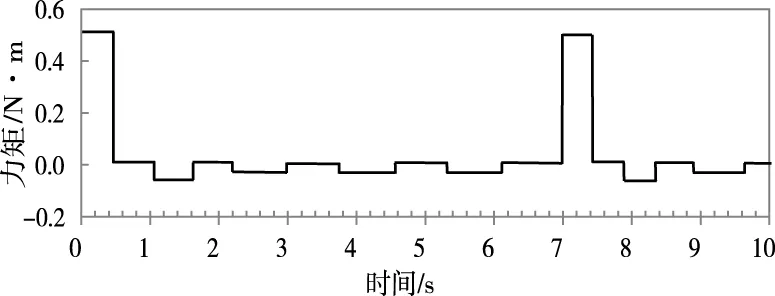
图4 作用力矩实验曲线
在有效范围内,采用随机改变步行参数的方式模拟机器人受到的外部扰动,模拟其步态稳定性,其中一组参数改变描述如表2所示,由于本文方法能够在三个步态内完成稳定性调整,因此为确保机器人真正进入步态稳定状态,这里选择在第五个周期时进行步行参数的改变。
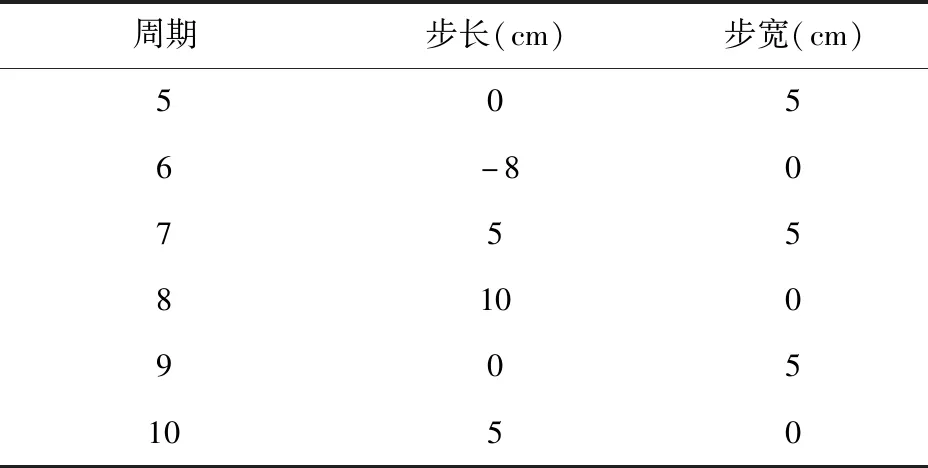
表2 步行参数扰动设置
基于表2的步行参数扰动仿真得到步态轨迹如图5所示。从步态轨迹可以看出,在步行参数变化周期内,根据模型与自适应算法得出的参考轨迹在x和y方向上均能够获得较好的预测效果,不仅能准确预测下一周期的轨迹趋势,而且真实轨迹基本与参考轨迹拟合,尤其最终调整得到的生成轨迹,几乎与真实轨迹重叠。这是由于本文利用当前的角度、角速度和加速度对后续步态参数进行预测,并在此基础上根据相位进行偏差补偿,提高了步态轨迹控制的精准性。该实验结果表明本文方法对于双足机器人步态控制更加稳定,抗外部扰动能力更好。
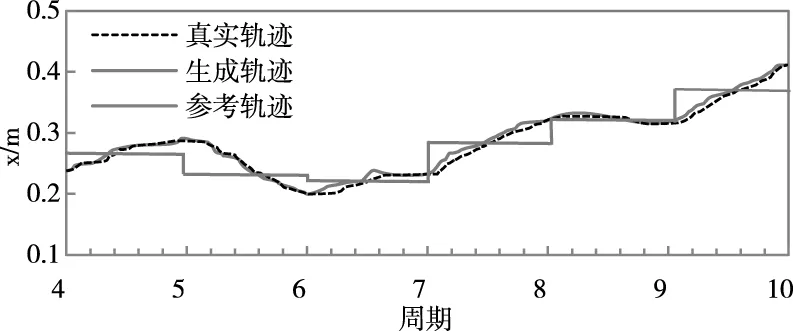
图5 步态轨迹实验曲线
5 结束语
为了提高仿生双足机器人的步态轨迹控制性能,本文基于人体行走的步态变化,分析了双足机器人步态平衡模型,同时提出了一种步态轨迹自适应控制方法。该方法在步态稳定与能耗目标约束下,根据当前步态轨迹参数预测出后续周期的轨迹参数,并利用周期间的相位差异进行偏差调整,抑制步态控制误差。通过仿真结果,验证了本文提出的自适应控制方法实现了良好的步态稳定性和抗干扰性,同时具有良好的能耗控制效果与步态调节速度。
