城镇无人机高分辨率三维网格图形建模仿真
2021-11-17郝向阳
杭 芬,郝向阳
(信息工程大学,河南 郑州 450000)
1 引言
对于教学和科研来说,利用无人机建造三维网格图形模型发挥着重要作用,大量模型试验都可以上升成理论[1-3]。目前我国建立的城镇无人机高分辨率三维网格图形模型建立方式主要有三种:第一种是利用Auto软件建立的,该软件在构建机体造型和曲面外形时,操作非常简单,能够很好地计算出无人机在飞行过程中的稳定性、所受阻力以及功率,并根据以上数据对无人机参数进行设定,最后利用无人机采集城镇图像;第二种是利用Constructor软件建立的,该软件是通过二次开发得到的,拥有一套完备的建模方式,能够将机体构建成一个有机整体,且更新及时;第三种是利用Max Surf软件建立的,能够快速地建立出城镇建筑模型的线型,尤其是在曲面设计上,十分真实,能较为精准地计算出输出型值,并建立数据库[4]。传统模型虽然具有较强的分辨能力,但是得到的三维网格图形很难满足细分连续的特性,所有的网格重组都需要经过预处理,准确度相对较差[5]。
本文基于目前的研究成果,针对城镇无人机建立高分辨率三维网格图形仿真模型,对无人机采集到的城镇图像模型的曲线曲面生成、光顺、三维造型、显示效果以及几何参数进行分析,通过仿真验证所建立的三维网格图形模型的正确性和适用性。
2 城镇无人机高分辨率三维网格图形建模环境
本文在建立城镇高分辨率三维网格图形模型时,选用的建模软件为Unigraphics软件,简称UG软件,该软件同时具备三种系统:CAD系统、CAM系统、CAE系统[6]。
UG建模方法打破传统的二维建模方法,用户在短时间内就可以通过计算机看到立体的城镇三维图像,基于此,对产品进行虚拟制造时,损失大大减少,加工过程中避免了不必要的浪费,成本低,设计周期短,产品质量高,市场竞争力强[7]。UG开发环境如图2所示。
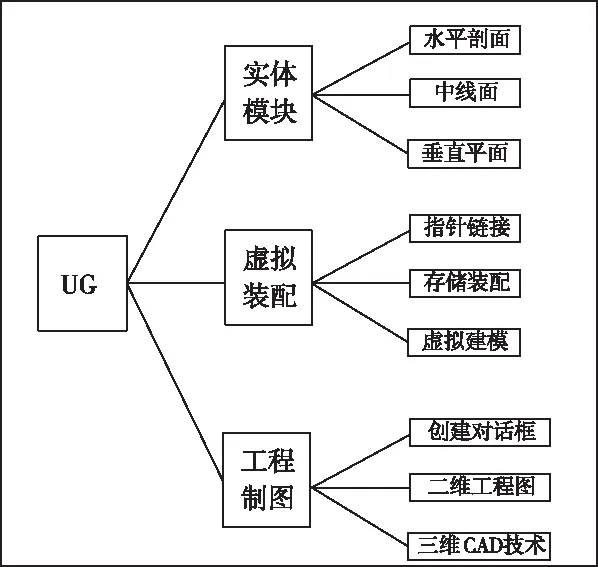
图2 UG软件模块
UG拥有三个模块,分别为实体建模模块、虚拟装备模块和工程制图模块,如图1所示。
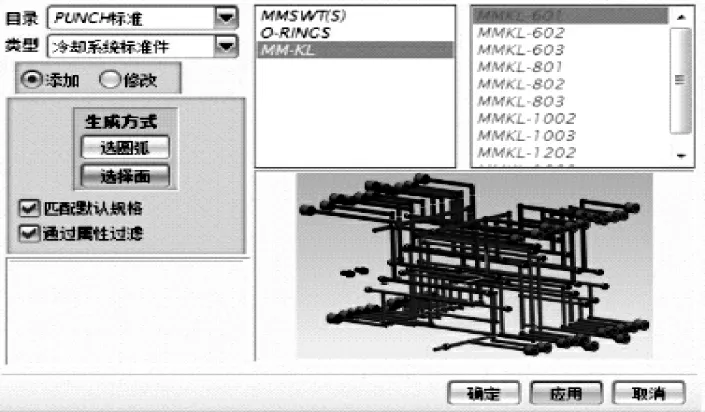
图1 UG开发环境
1)实体模块中拥有大量建模工具,可根据表面线框、曲面特征和各种参数完成建模,支持建立各种复杂构件,如:孔、槽、圆柱、体、快等,同时能够对建立的各种构件都可以镂空处理,实体模块可以同时提供模型和草图,分析不同产品的特点,根据产品不同特点建立不同的模型。实体模型在UG模块中充当主模块的作用,其它模块的工作都需要与主模块协调才能完成。
2)与虚拟装配模块配置的系统不同,得到的装配构架建模方法也不同,CAD系统得到的构建方法为多零件法,CAM系统得到的方法为虚拟装配法,二者最大的区别在于是否具备智能化条件,使用CAD系统时,则代表虚拟装配模块具备智能化条件,使用CAM模块时,则代表虚拟装配模块不具备智能智能化条件[8]。
虚拟装配模块中使用的链接为指针链接,对内存的需求较少,配置过程也得到简化,参与虚拟配置的各个部件定位十分灵活,定位之间有明显的相关性,根据参数就可以分析出部件配置所在位置。建模过程中虽然可以使用所有主数据,但是不可以自动更改主数据。所有的建模过程都是并行的,有效缩短了建模时间,节约了建模成本[9]。
3)工程制图能够将图样与设计模型形成关联,根据关联结果创建与实体剖视图,与实体模型协调后,可以得到一致的二维工程图。工程图的尺寸会随着实体图的改变而改变,这种方式可以缩小更新时间,降低误差。
作为一个全三维、双精度的系统,UG可以用来绘制任何图形,十分适合绘制三维网格图形,从设计到建成可以真正意义的实现无图纸化生产,十分适合建立城镇无人机高分辨率三维网格图形模型[10]。
3 城镇无人机高分辨率三维网格图形建模过程
城镇结构组成复杂,传统地建模方式只能够片面地反映出城镇构造的大致形状,不具备完全表述功能。城镇结构模型是有厚度的,因此它的表面也有两层,分别是内表面和外表面,其模型图像中所有平面都必须是平滑的[11]。通过型线图表示内表面,得到的三维网格图形加工和计算更加容易。
将获取的图像导入UG软件的步骤如下:
第一步,将上述获取的原始图像文件,另存为“TIFF”格式。
第二步,打开“光栅图像”对话框,单击“指定TIFF图像”按钮,选定上一步保存的TIFF图片文件。
第三步,单击“创建光栅图像”按钮,按钮显示为灰色,在绘图区域显示光栅图像,调整图像摆放方位及大小,完成UG的图像导入,最终在UG软件中,将导入的原始图像进行融合处理,为下一步构建城镇结构高分辨率三维网格图形建奠定基础。城镇结构高分辨率三维网格图形建模思路如图3所示。

图3 城镇结构高分辨率三维网格图形建模过程
第一步:建立原始图像。采集的原始图像包括主视图、左视图、俯视图和右视图四个部分,针对具体的城镇网格模型图建立不同的参数。
第二步:建立过渡图像。过渡图像为基本图形,内部包含了所有关键信息,为下一步工作打下基础。
第三步:建立关键图像。关键图像能够以信息的形式表达实体图像。
第四步:建立最终图像。最终图像代表得到的三维实体模型。
根据以上步骤可以完成城镇结构模型的CAD设计,进而对该模型进行加工仿真。
三维网格图像中的型线图在城镇结构图样中占据着重要地位,是重要的基本图样,不仅能够表示城镇中建筑的形状和大小,同时能够帮助工作人员分析城镇结构组成,三维网格图形建立的是否精确,直接影响后续的计算结果以及建造质量,因此目前对三维网格图形精细度要求都比较高。无人机航摄使用的量测相机像幅为18cm×18cm,由此可见非量测相机的像幅很小,因此,为在有限的图像像幅中获取精细度较高的图像,将在获取三维仿真模型之前进行空中三角测量,通过布设地面控制点和检查点完成城镇图像区域网平差,本文将选用控制点与检查点各30个,以确定本文获取城镇图像的精细度。
由表1可知,控制点和检查点的精度均控制得较好。在上述测量处理后,进行生成城镇结构三维仿真模型,三维网格图形拥有三个投影面,分别为正投影面、水平投影面和侧投影面,通过将这些平面与机体的交线投影在一起得到三维网格图形。城镇结构三维仿真模型如图4所示。
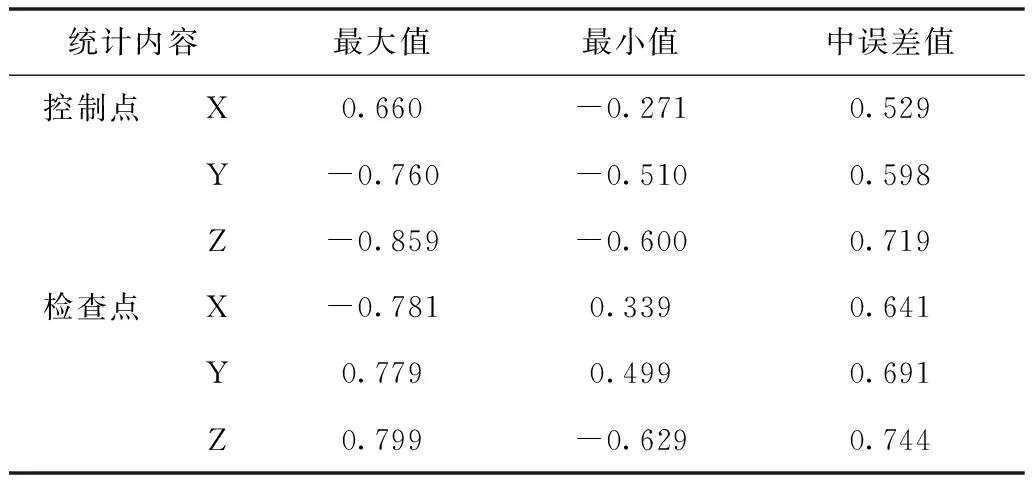
表1 空三精度表

图4 无人机三维仿真模型
三维仿真图形中平行于V面得到的平面曲线具有积聚性,所有的投影都能够投射在同一个直线上,利用纵剖面得到城镇结构形状[12]。
三维网格图形中的各类线型和线型所在视图上的投影组成了三维网格图像,为了使网格图反映的效果更加真实,各类线型都不会直接覆盖在机体外表面,而是通过透视的方式表达出来。三维网格中的线型所处位置复杂,样条形状多样,曲线走向自由,大量线条反映出城镇结构中的关键信息。三维网格图形的表达方式如图4所示。
观察图5可知,沿着地形方向建立x轴和y轴,设定x轴方向有网格点P个,y轴方向有网格点Q个,网格点之间的间距分别为Δx和Δy,从坐标轴到三维网格图形中的距离,沿着x轴的被记为L,沿着y轴的被记为W,则可以得到如下公式
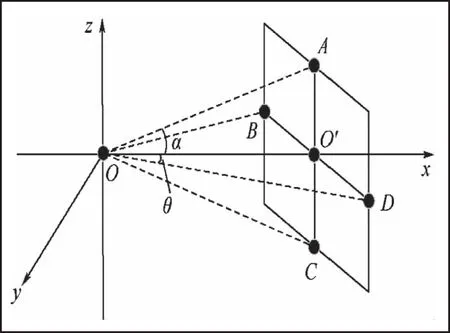
图5 三维网格图形表达方式
(1)
(2)
图5中α为无人机采集城镇图像时从地面飞到天空中飞垂向爬升角,θ为无人机在水平面转弯时形成的角,无人机所在的位置为O,得到的映射图像为A、B、C、D和O′。
三维网格图形中包括多个离散点,也是CFD模型的几何表达式,为模拟、分析和计算提供理论基础。三维网格图形的质量精度对之后的计算效率有着很重要的影响,对于一些复杂的建模问题,三维网格模型生成时间会更长,也更加容易出错,所以要投入更多的关注量。
三维网格图形分为结构化和非结构化两种,当数值计算的坐标系位于正交和非正交曲线中间,生成的三维网格图形为结构化网格,每一个节点和其它邻点之间的关系维持不变,固定关系在网格之间表现出来,不需要专门设置参数。相较于非结构化网格,结构化网格生成速度更快,网格质量更好,内部结构数据简单,所形成的区域十分光滑,接近实际模型。由于城镇结构绝大多数的造型都是平面造型,所以使用结构网格取得的效果更好。
为了能够达到高分辨率的效果,三维网格图形会被分成若干个小块,每个小块被划分在网格之间,采用的网格为结构化网格,块与块之间可以拼接,这种方式加强了图形的流畅性,整体拼凑起来也不会显得突兀。
城镇无人机高分辨率三维网格图形远场边界示意图如图6所示。
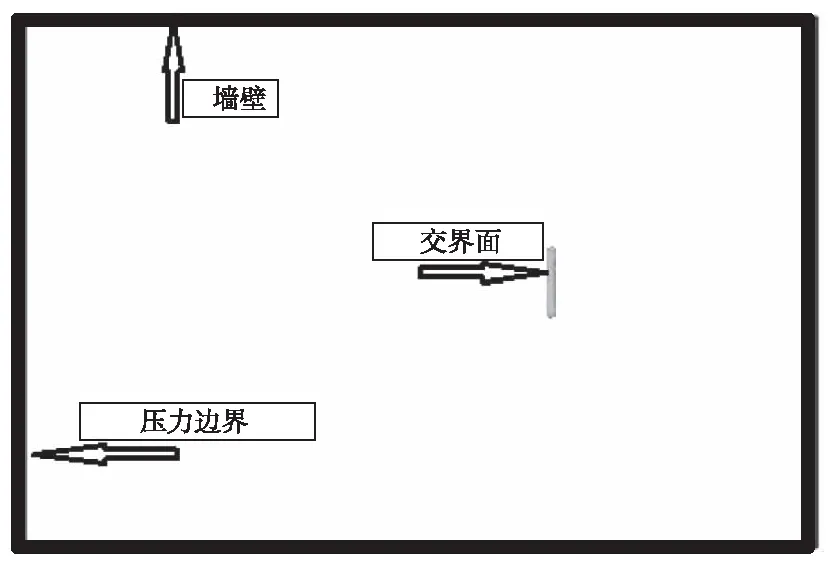
图6 三维网格图形远场边界示意图
三维网格图形会被分成两个区域,分别是静止区和运动区,内部包含计算域和滑流边界,对于建模结果有着重要影响。计算域越大,网格数量越多,建模时间也会加强,对于硬件的需求随之增高。图6得到的示意图是通过MRF方法得到的,根据上述远场边界示意图进行建模,可以得到精准的三维网格模型。
通过CFD软件处理后的城镇无人机高分辨率三维网格模型相较于传统方法取得的效果更好。主要是因为CFD软件的处理器要优于其它处理器,内部操作界面稳定,不同网格在处理器中间可以任何装配,对于类似拓扑结构的复杂网格模型而言,工作量得到大大减少,O型网格的使用能够显著提高网格质量。
得到的远场域网格和旋转域网格如图7所示。
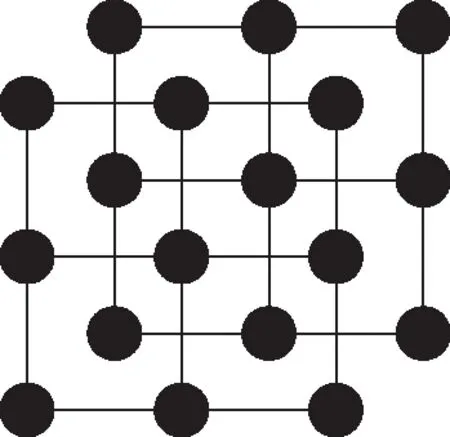
图7 远场域网格和旋转域网格
过度网格截面如图8所示。

图8 过度网格截面
对比图7和图8可知,相较于远场域网格和旋转域网格,过度网格截面的图形更加复杂,内部的节点数更多,网格质量也更多。通常对于一些简单模型而言,使用的网格截面为远场域和旋转域网格截面,而对于一些复杂模型而言,使用的网格截面为过度网格截面。
4 仿真研究
为了检测本文设计的城镇无人机高分辨率三维网格图形模型的工作效果,设计了对比仿真,选用本文研究的三维网格图形模型分别和利用Auto软件建立的模型、利用Constructor软件建立的模型以及利用Max Surf软件建立的模型进行对比,比较建模时间和工作成本。
4.1 实验参数
设定实验参数如表2。
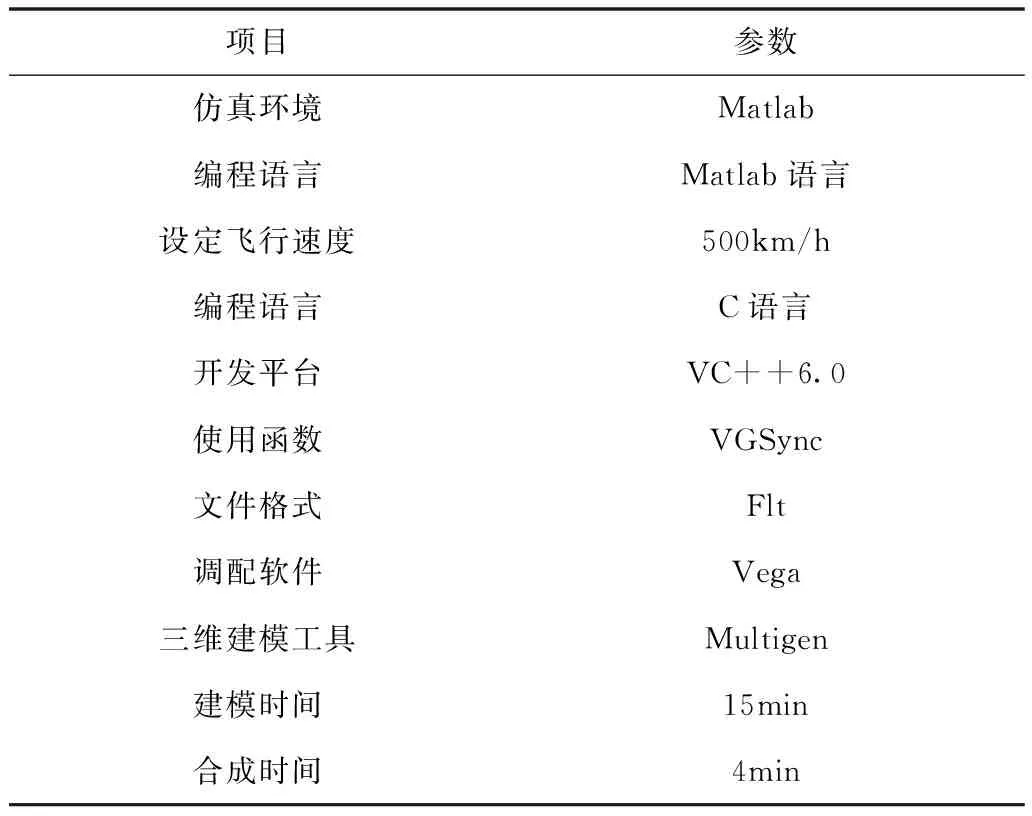
表2 实验参数
在上述实验环境下,根据设计的参数采用传统模型和本文模型进行实验对比,记录实验结果。
4.2 结果与分析
得到的结果如下所示。
1)建模成本对比
分析图9可知,当建模时间为5min,本文研究的模型花费的成本为0.014万元,利用Auto软件建立的模型花费的成本为0.021万元,利用Constructor软件建立的模型花费的成本为0.023万元,利用Max Surf软件建立的模型花费的成本为0.025万元;当建模时间为10min,本文研究的模型花费的成本为0.013万元,利用Auto软件建立的模型花费的成本为0.016万元,利用Constructor软件建立的模型花费的成本为0.021万元,利用Max Surf软件建立的模型花费的成本为0.025万元;当建模时间为15min,本文研究的模型花费的成本为0.0105万元,利用Auto软件建立的模型花费的成本为0.014万元,利用Constructor软件建立的模型花费的成本为0.018万元,利用Max Surf软件建立的模型花费的成本为0.025万元。
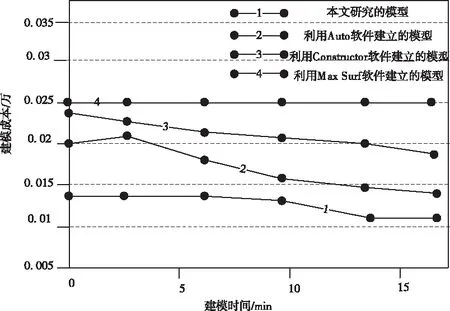
图9 建模成本实验结果
2)建模时间对比
观察图10可知,随着建模次数的增加,建模成本也在不断降低,但是本文研究的模型花费成本始终低于传统模型花费成本。
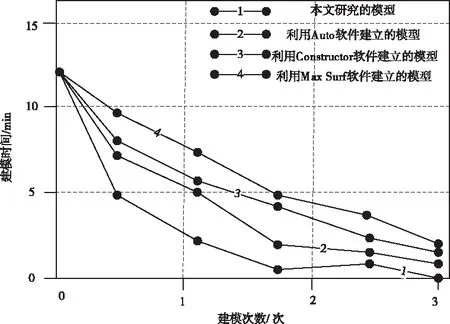
图10 建模时间实验结果
根据对比结果可知,相较于传统模型,本文模型建立的时间更短,花费成本更低,能够在短时间内建立出有效模型,对于研究无人机飞行有着重要意义。
5 结束语
针对城镇无人机高分辨率三维网格图形建模进行深入研究,阐述了建模过程选用的软件环境,介绍了构成原理和形成的无人机三维网格图形模型结构特点,通过分析三视图,判断建立模型的准确性。通过仿真对模型的实用性进行验证。本文对网格模型研究透彻深入,三维模型的建成,有效实现了整个过程的自动化、快速化和精确度。
