移动电站动态负载测试的仿真与特性分析
2021-11-17朱长青谷志锋
刘 威,朱长青,张 衡,谷志锋
(1. 陆军工程大学,河北 石家庄 050000;2. 石家庄铁道大学,河北 石家庄050000)
1 引言
移动电站主要由柴油机、同步发电机以及控制系统组成,通常用于为独立电力系统提供电力支持,如用于船舶、装备系统等供电领域。不同于大容量的电力网,移动电站及其负载构成的独立电力系统具有电源的容量小,而负载冲击性强的特点,在负载变化时励磁与调速系统需要一定的响应时间采取调节措施,造成供电母线电压和频率的波动,影响用电负载(火炮、雷达等)的工作性能[1-3]。
各种负载的电路结构和工作原理不同,相关标准对移动电站的电气性能指标及试验方法进行了规定[4-5],其中动态性能测试包括阻感负载的突加、突减和感应电机的直接启动。目前针对谐波励磁与电子调速的移动电站的建模研究较少,对移动电站动态特性的评估指标相对简单,无法全面评估移动电站的性能[6-7]。
本文分析了中小功率等级移动电站常采用的谐波无刷励磁系统与电子调速系统的数学模型,基于MATLAB/Simulink仿真平台,构建以阻感负载和感应电动机为测试负荷的移动电站仿真系统。从电压和频率的波动、瞬时功率和暂态波形的角度提出评估指标,对移动电站的动态特性进行仿真分析。首先比较两类动态负载下移动电站特性的不同,并对相关指标进行计算,然后分析负载加载时刻对暂态波形的影响,为优化移动电站测试技术提供依据。
2 仿真系统模型的构建
移动电站由同步发电机和励磁控制器构成其励磁系统,由柴油机和调速器构成其调速系统。同步发电机的励磁系统对于稳定输出电压、维持运行稳定具有重要意义,三次谐波无刷励磁具有简单可靠、自励恒压、动态特性好的优点,在中小型同步电机中得到了广泛应用。当柴油机的负载变化时,转速应保持相对稳定,以保证电站频率稳定,电子调速器消除机械摩擦及损耗的影响,具有控制准确、响应迅速、调试方便的优点。基于三次谐波无刷励磁与电子调速的移动电站具有良好的性能,下面分别介绍各部分的数学模型。

图1 移动电站测试系统仿真结构图
2.1 调速系统数学模型
调速系统由柴油机与电子调速器构成,柴油机通过飞轮盘与同步发电机转子直接连接,电子调速器由转速传感器、电调控制器、电磁执行器组成,如图2所示。

图2 调速系统原理图
采用角速度ω表示内燃机凸轮盘与同步电机转子的共同转速,转速传感器输出脉冲信号,经过频压转换得到正比于ω的直流电压Uwt,给定角速度ωr由转速调整电位器提供对应电压Uwr,电调控制器通过比较Uwt与Uwr,获得偏差EU。转化过程近似线性,增益KT由转化装置决定,则
EU=Uwr-Uwt=KT(ωr-ω)
(1)
EU经过电调控制器的PID环节输出电磁执行器的驱动信号IE,其比例系数KP、积分时间常数TI和微分时间常数TD由出厂前整定,用传递函数表示为

(2)
电磁执行器输出轴与柴油机油量调节杆连接,输入为转速控制器的驱动信号IE,输出为油量调节杆的控制位移LE,可采用一阶惯性环节等效,其环节增益KE、惯性时间常数TE可通过实验确定,传递函数为
(3)
柴油机的输出力矩与循环充气量、循环燃油加入量、热效率等有关,实际内部过程十分复杂,详细分析并建立高阶模型较为复杂。由于电站在正常工作时,柴油机工作在额定转速附近,动态范围较小,根据稳态特性进行分段线性化,可以得到较好的精度。从系统外部输入的角度,稳态时输出转矩TD可以表示为[8]
TD=f(ω,L)
(4)
柴油机的速度特性指油量调节杆位置不变时,转矩随转速的变化关系,表现为一条光滑且平缓的曲线;转速一定时,转矩与油量调节杆位置近似呈线性关系。当工况变化范围较大时,可以建立多个分段线性化模型。对于额定转速的某一工况,可以得到TD的表达式为

=m0ω+n0L+b0
(5)
式中:m0,n0,b0为柴油机在该工况下的线性化参数,可通过实验或特性曲线确定。
考虑到油量调节过程的机械间隙以及柴油机本身的燃烧滞后,柴油机的转矩响应存在一定的滞后,可以认为油量调节杆位移存在延时td,即Ld(t)=L(t-td),则式(5)可表示为
TD=m0ω+n0Ld+b0
(6)
2.2 励磁系统数学模型
励磁系统由三次谐波无刷励磁同步发电机与励磁调节器(AVR)构成[9]。三次谐波无刷励磁通过在定子槽中增设主绕组(Wm)之外的三次谐波绕组(Wh),将气隙磁场的谐波功率引出,经过AVR调节后作为励磁系统的输入,对旋转电枢式交流励磁机进行励磁,三次谐波电势随着感性负载的增大而增大,因此具有自动电压调整的特点。励磁机输出通过旋转整流器后转化为直流,对主发电机励磁绕组(We)进行励磁,从而实现励磁系统的无刷化,系统的原理如图3所示。

图3 谐波无刷励磁系统原理图
2.2.1 三次谐波绕组电动势


(7)
式中:N为绕组总串联匝数;Kw为绕组因数;B为磁场幅值;k1在B0变化不大时可以近似为常量;忽略饱和时E01可以表示为Xadif。
负载时,考虑到转子的凸极效应,将Fa分解成两个分量,交轴电枢磁动势Faq与直轴电枢磁动势Fad,即
Fa=Fad+Faq


图4 主极磁动势与主磁场

图5 电枢磁动势与电枢反应磁场
考虑直轴电枢反应时,谐波绕组电动势Ead3与主绕组电动势Ead1的关系为

(8)
式中k2可以近似常量;由于Ead1正比于Bad1,不计磁饱和时,Bad1正比于Fad,又Fad正比于Id,即Ead1可表示为IdXad。
同理,考虑交轴电枢反应时,谐波绕组电动势Eaq3与主绕组电动势Eaq1的关系为
Eaq3=k3IqXaq
(9)


(10)
2.2.2 同步电机模型
对于同步电机的派克方程,在计及绕组的电磁过渡过程以及转子机械过渡过程时,方程为七阶模型。常用实用模型的简化忽略定子绕组暂态,令定子电压方程中变压器电动势为零,这种简化要求同步电机定子绕组中只通过基波正序电流。但在移动电站的动态负载测试中,负载的突变将引起较大的负序电流分量,对应的变压器电动势较大,需要考虑定子暂态,因此仿真中应该采用同步电机的七阶方程[11-12]。
考虑三次谐波绕组对转子运动方程的影响,忽略电阻损耗和供给磁场的功率,可认为绕组的输出电功率等于转化的机械功率,此时转子运动方程为

(11)
其中,δ为q轴领先同步坐标系实轴x的角度;TD为柴油机的输出力矩;P3为三次谐波绕组输出电功率;H为机组惯性时间常数。
2.2.3 励磁控制系统模型
AVR是励磁控制系统的核心,谐波无刷励磁系统的AVR包括电压测量比较电路、PID调节电路和可控硅触发电路等[13]。发电机端电压经测量环节后与给定电压比较,其偏差量通过PID环节后输出控制量UA,UA通过改变励磁回路中可控硅的导通角对谐波绕组的输出功率UR进行调节,从而调控励磁机的输出,即主发电机的励磁电压Ef,最终形成对机端电压的闭环控制,励磁系统控制框图如图6所示。
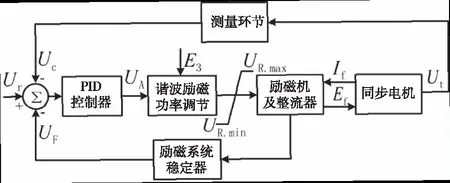
图6 励磁系统控制框图
3 仿真结果与分析
移动电站的负载种类多样,特性不同,由于系统容量小而负载冲击性强的特点,因此负载突变时的电气性能指标对于衡量电站性能十分重要。本文根据移动电站试验标准,采用阻感负载的突变和感应电机的直接启动来检测其动态电气性能指标,仿真设置如表1所示。

表1 仿真系统参数
在阻感负载的突加突卸仿真中,0.5s时突加20kW负载Load1,功率因数为1,1.0s时全部卸载,1.5s时突增25kVA负载Load2,功率因数为0.8,2.0s时全部卸载,每次负载变化前发电机已经进入稳定状态,仿真结果如图7所示,四个子图分别为A相电压电流波形、端电压有效值、频率波动、瞬时有功和无功功率。

图7 阻感负载的突加突卸仿真结果
在直接启动感应电机的仿真中,0.5s时将7.5kW的感应电机接入,感应电机的转矩设为空载,0.8s时断开感应电机,负载变化前发电机已经进入稳定状态,仿真结果如图8所示。

图8 直接启动感应电机的仿真结果
为了准确分析移动电站的动态电气特性,定义以下评估指标:
1)瞬态电压、频率调整率δUs与δfs:δUs=(US-U)/U,δfs=(fS-f)/f.
其中,U(f)表示电压(频率)的额定值,US(fS)表示负载突变时的瞬时电压(频率)的最大值或最小值。
2)瞬时有功、无功最大斜率Dpm与Dqm:Dpm=(pS-pE)/Δt,Dqm=(qS-qE)/Δt.
其中,pS(qS)和pE(qE)表示负载突变时斜率最大分段端点对应的瞬时有功(无功)功率,Δt为分段对应的时间。
通过计算,各项指标的结果如表2所示,通过比较可以得出感应电机直接启动时的冲击性远大于两组阻感负载的突加过程,其中瞬态电压调整调整率和瞬态频率调整率分别为-47.9%和-6.26%,最大瞬时有功功率的斜率达到4.2kW/ms。

表2 指标分析结果
进一步分析移动电站在负载突变时的暂态电压与电流的波形,现有平台无法对负载的加载时刻进行调节,这里将负载加载时刻分别发生在电压的过零点与峰值时刻,对三组负载进行仿真,如图9和图10所示。可以发现,不同的加载时刻,暂态电压波形畸变的程度不同,相应的暂态电流的波形也不同。在移动电站的测试系统中,负载突变时电流的最大变化率是需要考虑的因素,也是电站测试用电子负载的关键设计指标。经计算,对于不同的负载加载方式,最大电流速率达到了33A/ms,因此在研制电子负载时,其电流跟踪速率需大于该数值。
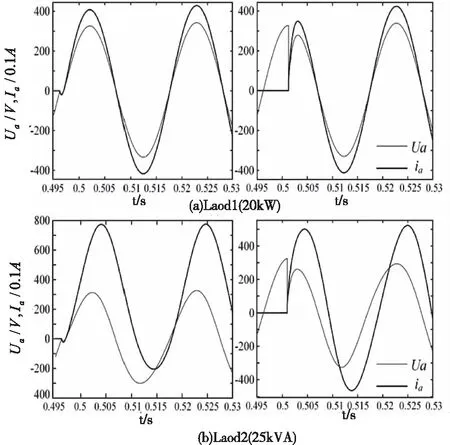
图9 阻感负载在不同加载时刻的暂态波形

图10 感应电机在不同加载时刻的暂态波形
4 结论
本文针对移动电站的动态特性测试,对移动电站的数学模型进行分析,并基于MATLAB/Simulink仿真平台,构建以阻感负载和感应电动机为测试负荷的移动电站仿真系统,结果表明所建仿真系统可以用于移动电站动态特性的研究。通过分析仿真结果,比较两类负载对移动电站造成影响的不同,通过对相关指标进行计算,对移动电站的动态特性进行了全面衡量。进一步分析了负载加载时刻对电压电流暂态波形的影响,结果表明不同加载方式对应的暂态波形有着明显的区别,相对感应电机,阻感负载的电流暂态过程相对较短,电流波形稳定快,但是暂态过程中的电流变化率均达到了30A/ms的级别,因此需要很高的电流跟踪速度,为研制移动电站测试用电子负载提供了参考。利用该数字仿真平台可以对移动电站测试技术进行深入理论分析,对于全面评估移动电站动态性能,优化电站试验平台检测技术具有重要意义。
