电传动装甲车辆母线电压双通道补偿控制
2021-11-15廖自力疏歆高强李嘉麒
廖自力, 疏歆,2, 高强, 李嘉麒
(1.陆军装甲兵学院 兵器与控制系, 北京 100072; 2. 71345部队, 山东 淄博 255000;3. 96901部队, 北京 100094)
0 引言
轮式电传动装甲车灵活性高、机动性强,尤其是纯电驱动模式下还具备低噪声、高隐蔽的特性,使其成为当今陆战车辆的主流发展方向[1-2]。车内电力系统集电能生成、变换、存储、分配及综合管理控制于一体,称为车载综合电力系统[3-4]。
此类车载综合电力系统主要特点是:1)系统只能工作在离网模式,且器件容量、系统体积严重受限,表现为弱惯性系统;2)负载多为采用闭环控制的电机负载,其负阻抗特性会对母线电压产生重要影响[5-6];3)车辆工况复杂多变,加速、制动切换频繁,对系统动态冲击较强。因此,车载电力系统抗扰动能力较差,极易出现以下两方面问题:一是车辆突然加减速对电力系统表现为大功率负载的投切,从而导致母线电压剧烈的暂降或暂升;二是在车辆加速过程中由于负载的负阻抗特性影响,造成母线电压低频振荡发散,导致系统失稳[7]。以上母线电压的不稳定均可导致车内某些设备无法正常工作,甚至损坏设备,引发灾难性后果。
为提高系统母线电压的稳定性能,文献[8]选择增大超级电容容值来增强系统惯性、改变控制策略,在负载投切时提供瞬间大功率,从而缓解微源输出响应慢的压力。文献[9]利用小波变换分离负载需求功率的高频与低频分量,实现负载频率与动力源输出特性的匹配。以上方法都可在一定程度上保证系统的稳定运行,但对于车载综合电力系统而言,加大母线电容一方面会增大系统的体积、质量,另一方面会造成动态响应慢,不利于系统控制;同时由于车辆工况复杂多变,系统响应慢等问题难以做到对功率分频后需求的精确补偿。因此,结合系统结构和负载特性,通过改变控制策略来提高母线电压稳定性,既可以减小系统体积又可以实现实时控制。
本文通过分析某型8×8轮式装甲车车载综合电力系统拓扑结构,建立计及超级电容和电机负载在内的DC/DC小信号模型。剖析车辆在突然加速或减速和加速过程中出现的母线电压波动诱因。为有效提高母线电压稳定性,在功率前馈控制基础上结合电机负载特性提出双通道补偿控制策略。最后通过硬件在环仿真和样车试验验证所提控制策略的有效性。
1 车载综合电力系统结构分析及建模
1.1 车载综合电力系统拓扑结构
某型8×8轮式电传动装甲车车载综合电力系统拓扑结构如图1所示,本文主要研究车辆在纯电驱动模式下的母线电压波动抑制策略。车辆工作在纯电驱动模式下采用8×8驱动模式(8个轮毂电机同时工作),为研究方便,认为车辆平稳行驶、载荷平均。此时发动机- 发电机组停止工作,系统由动力电池供电,超级电容为储能单元,负载主要为8个轮毂电机,结构如图1中虚线框内所示。
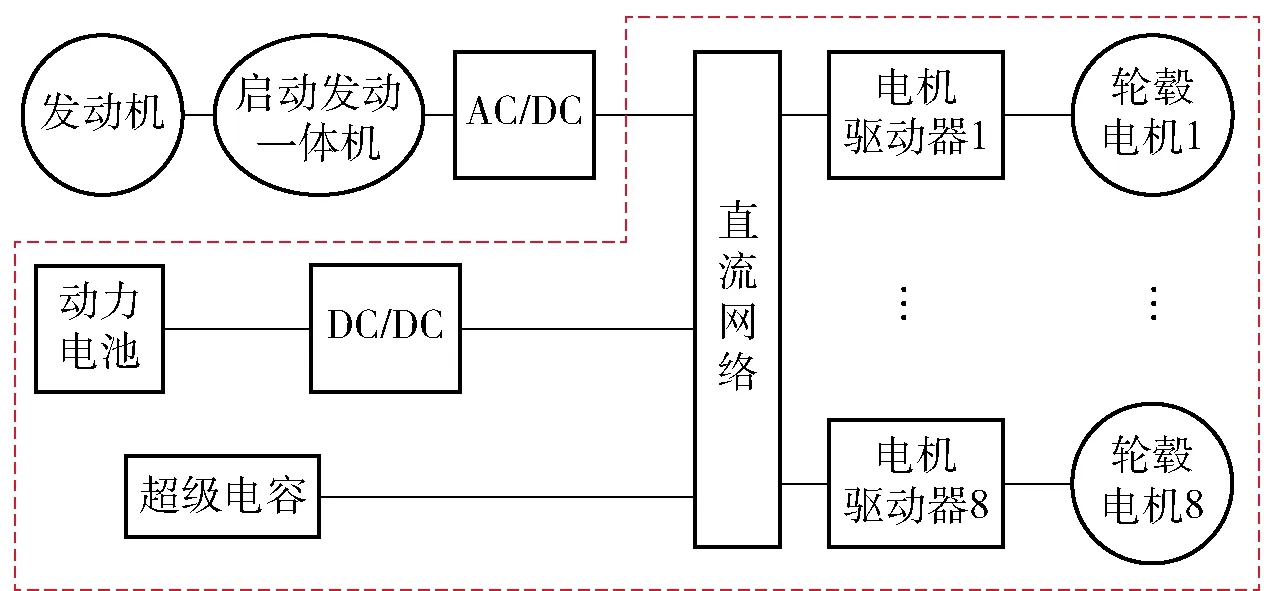
图1 纯电驱动模式车载综合电力系统拓扑结构Fig.1 Topological structure of vehicular integrated power system in engine-off operation mode
1.2 双闭环控制下DC/DC小信号建模
图1所示系统拓扑结构中,超级电容直接挂接于母线,为不可控单元,可将其与DC/DC高压侧支撑电容等效考虑,每组电机驱动器- 轮毂电机可以等效为一个负载单元。为便于后文分析,现对DC/DC变换器进行小信号建模。
当车辆运行在纯电驱动模式时,DC/DC变换器工作在Boost模式,此时采用电压外环、电流内环的双闭环控制[10],系统的电路拓扑结构如图2所示,其主要参数如表1所示。图2中,R为电感电阻,L为DC/DC滤波电感,T为二极管,G为绝缘栅双极型晶体管(IGBT),Cs为支撑电容,C为超级电容,ub为动力电池电压,ubus为母线电压,ubus,r为参考母线电压,ui为输入电压,iL为电感电流,ii为输入电流,i1~i8分别为8个电机负载的输入电流。

表1 某型8×8轮式装甲车车载综合电力系统主要参数Tab.1 Main parameters of vehicular integrated power system of 8×8 wheeled armored vehicle
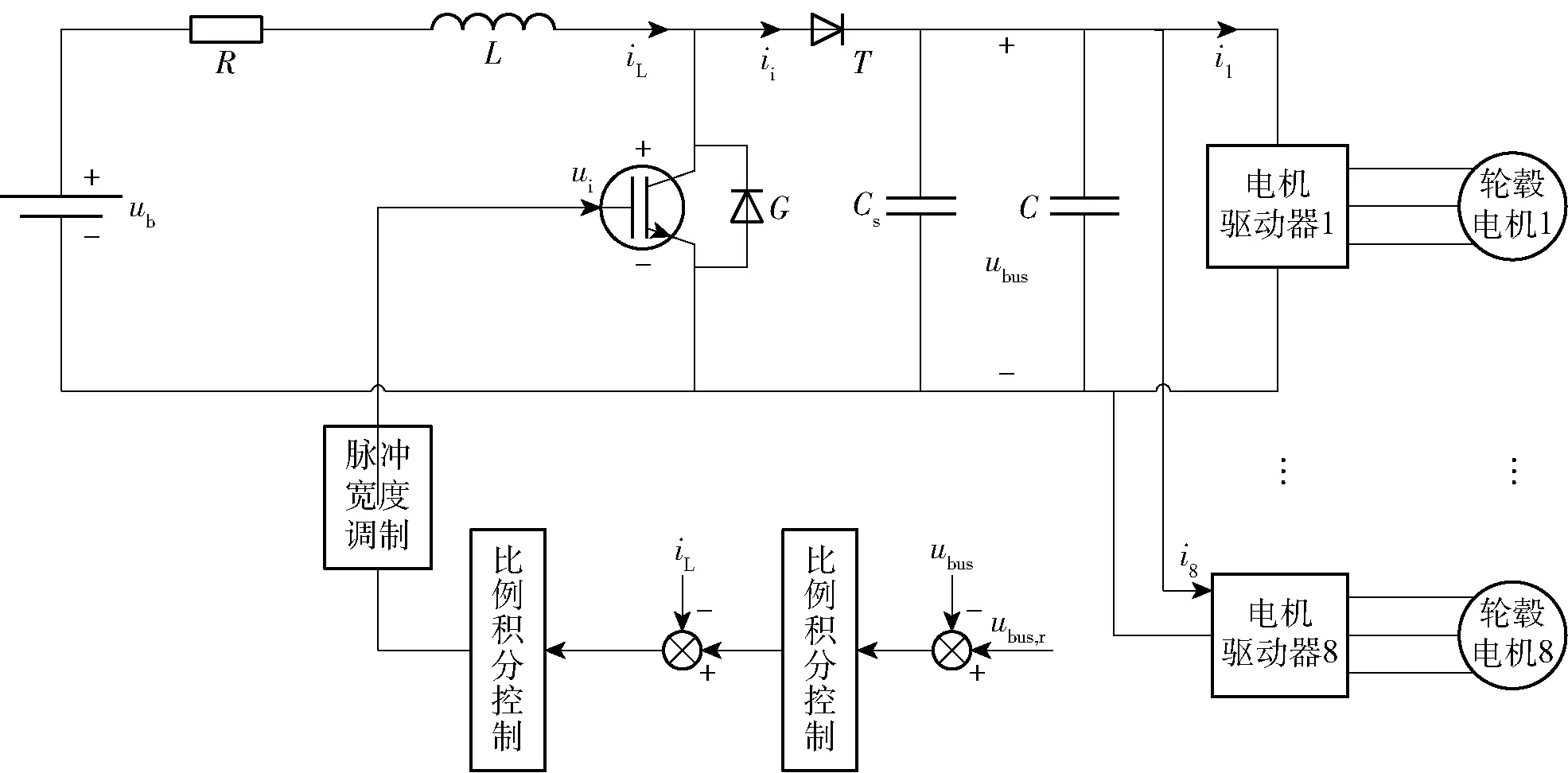
图2 双闭环控制下系统电路拓扑结构Fig.2 Topological structure of system circuit under dual closed-loop control
假设IGBT为理想开关管,在连续导通模式下,使用状态空间平均法[11]得到状态空间平均方程为
(1)
式中:P为8个电机驱动器- 轮毂电机总功率。假设动力电池为理想电源,则在(ui,ubus,ii,iL,P)的稳态工作点(Vi,Vbus,I0,IL,P)附近添加小扰动(Vi为稳态输入电压,I0为电压源输出的稳态电流,IL为稳态电感电流),消去状态平均方程两侧的稳态量并忽略高阶分量,转化到频域可得到如下线性化后的小信号模型
(2)
且满足
(3)
由以上分析可得DC/DC变换器双闭环控制下小信号框图如图3所示。图3中,Gup、Gip分别为电压传函和电流传函,Gs为脉宽调制控制器传函,
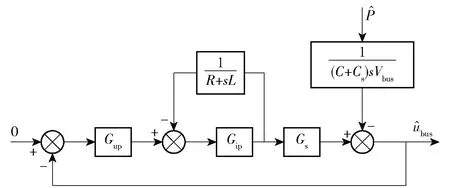
图3 双闭环控制下DC/DC变换器小信号框图Fig.3 Small-signal model of DC/DC converter with dual closed-loop control
(4)
2 母线电压控制策略
第1节提到的车辆行驶过程中车载综合电力系统母线电压波动问题:一是由于突加或突卸负载导致的母线电压暂降或暂升;二是在车辆加速过程中出现的母线电压振荡发散。针对前者结合图3分析其原因,是由于负载功率突变对系统产生的瞬间扰动过大,电压环与电流环响应较慢,无法迅速对iL进行补偿。因此需要在负载功率扰动产生后、在ubus产生扰动前就对其进行补偿,才可及时有效地抑制负载扰动对母线电压的影响,故考虑引入功率前馈控制。
2.1 功率前馈控制

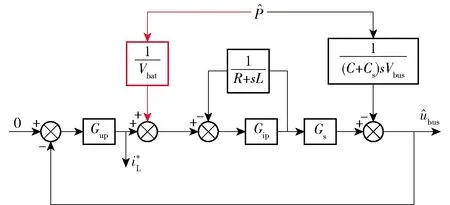
图4 功率前馈控制下DC/DC变换器小信号框图Fig.4 Small-signal model of DC/DC converter with power feedforward control
结合图4与(2)式,可得加入功率前馈后负载功率到母线电压的小信号传函为
(5)
根据表1中的参数,电机功率从105 kW逐渐增加至135 kW,步长为5,得到(5)式的极点分布如图5所示。
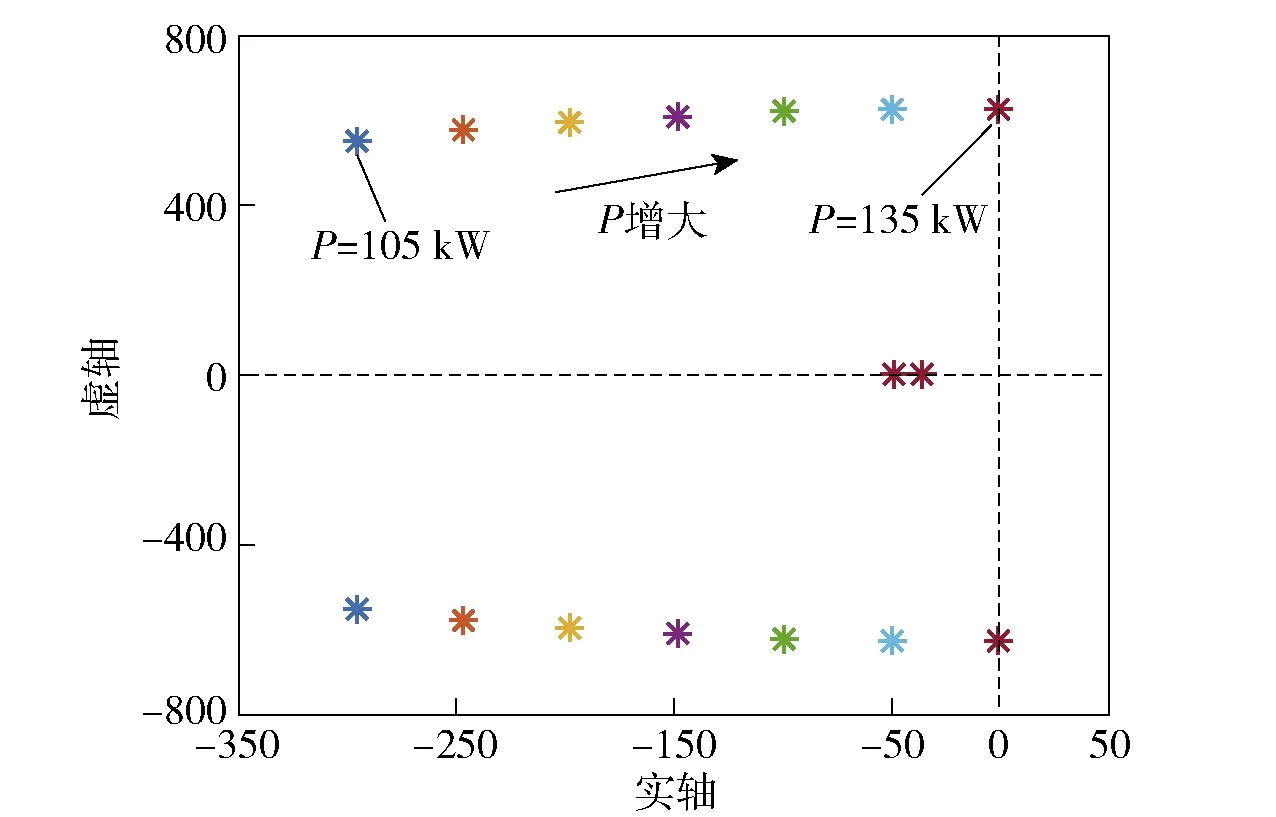
图5 不同电机功率下bus/的极点分布(功率前馈控制)Fig.5 Poles distribution of bus/ with different motor powers (power feedforward control)
从图5中可以看出:随着负载总功率增大,极点逐渐右移,系统稳定性变差;当增大到135 kW时极点落在虚轴上,系统开始振荡发散。因此在当前条件下,负载总功率需低于135 kW.
2.2 抑制负阻抗特性的电压补偿方法
传统功率前馈控制策略虽然能够有效减少负载投切对母线电压的影响,但以上都仅考虑负载功率值突变引发电压波动的问题,并未将负载特性考虑在内。而闭环控制的电机控制器- 轮毂电机负载由于负载变换器比例系数远大于源变换器,因此可近似等效为恒功率负载(CPL),则负阻抗特性将直接威胁电压稳定性[14-15]。图6所示为负阻抗特性原理图。图6中,vL为电感L两端电压,v0为CPL两端电压,vi为电压源输入电压,i为电压源输出电流,V0为CPL端稳态电压。
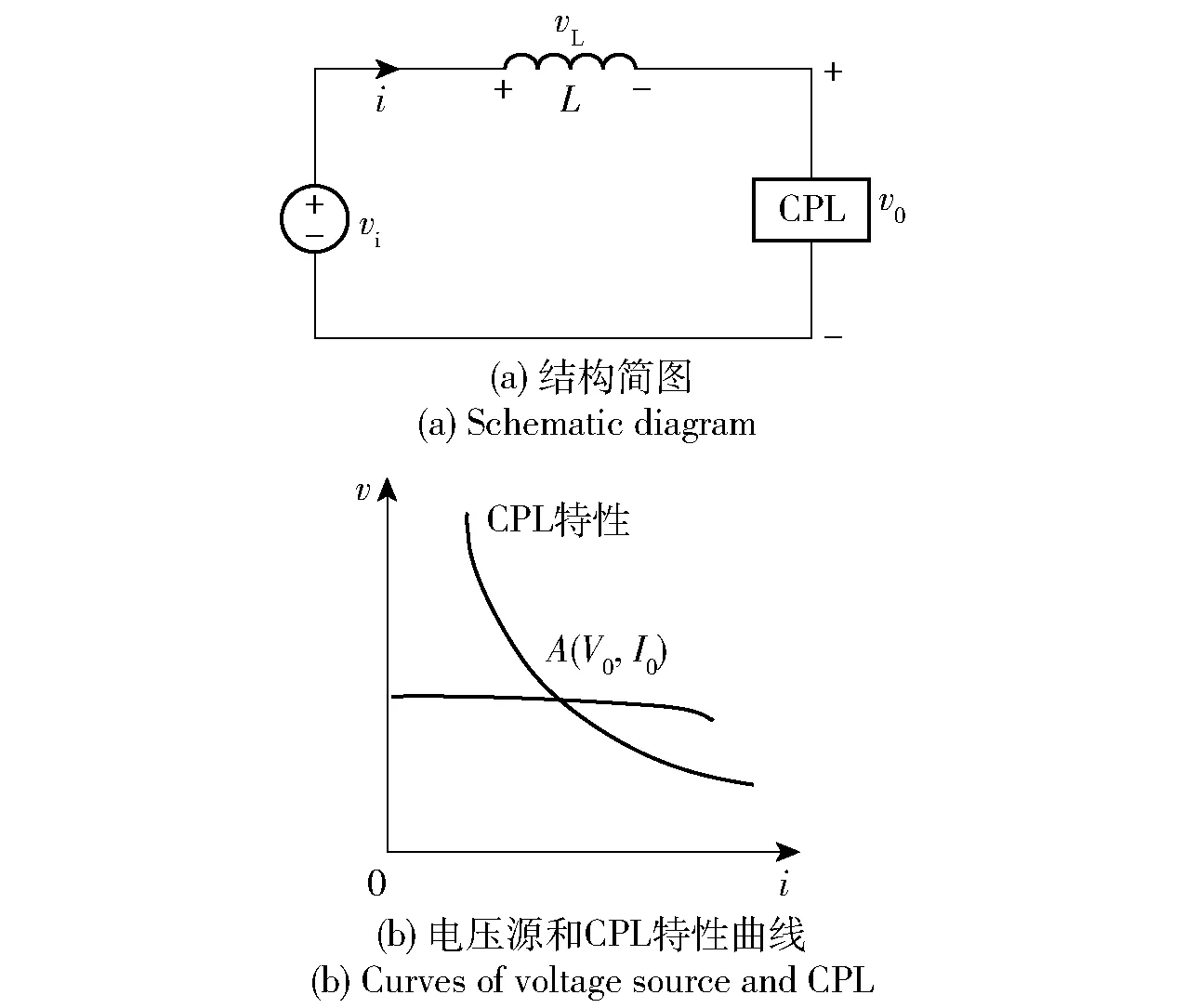
图6 负阻抗特性原理图Fig.6 Schematic diagram of negative impedance characteristics
分析图6可知,当CPL端电压v0与电压源输入电压vi相等时,系统达到稳态工作点A(V0,I0)。假设系统中存在扰动,致使电压源输出电流i较平衡点电流偏大Δi,则为保证负载功率恒定,CPL的端电压将下降。但此时电源电压vi大于CPL的端电压v0,因此输出电流进一步提升,从而使工作点不断右移并逐渐远离平衡点,系统进入正反馈工作状态。反之,假设系统的扰动导致电流比平衡点电流偏小Δi,系统的工作点会不断左移,逐渐远离平衡点。
基于以上分析考虑,车辆在加速过程中负载功率缓慢变化,电压与电流反馈环应可及时响应母线电压扰动,但由于负阻抗特性的影响,母线电压出现振荡发散。下面从电机负载特性入手,在原有功率前馈控制基础上,增加抑制负阻抗特性的电压前馈,从而进一步提高母线电压稳定性。
系统负载总功率为
(6)
(6)式进行小信号分析,可得
(7)
结合(3)式与(7)式,可得
(8)
(8)式两边对时间t微分并同乘L,可得
(9)

图7 DC/DC母线电压补偿控制策略Fig.7 Voltage compensation control strategy of DC/DC converter
2.3 双通道补偿控制
系统负阻抗是导致系统失稳的重要因素,工程上大多采用增加正阻抗或者通过控制来提高系统稳定性。本文通过控制的角度来抵消系统负阻抗带来的影响,根据车载综合电力系统母线电压两种失稳机理,需要同时抑制负载投切和负载特性对电压的影响。因此,综合以上功率前馈控制以及抑制负阻抗特性的电压补偿控制,本文提出双通道补偿控制策略,提高了系统的稳定性。其小信号控制框图如图8所示。图8中,Gf为双通道补偿控制器传函,
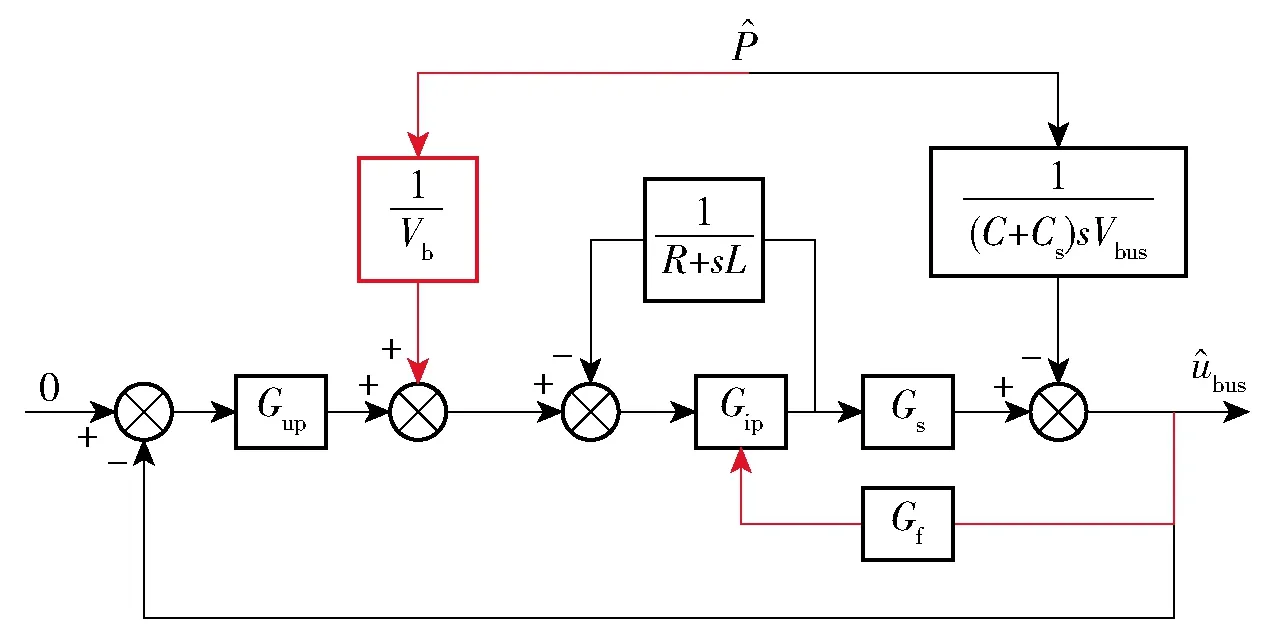
图8 双通道补偿控制策略Fig.8 Dual-channel compensation control strategy
(10)
结合图8与(10)式,可得采用双通道补偿控制后负载功率到母线电压的小信号传函为

(11)
同样根据表1中参数,电机功率从105 kW逐渐增加至135 kW,步长为5,得到(11)式的极点分布如图9所示。
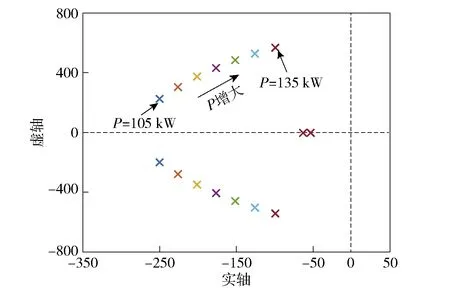
图9 不同电机功率下bus/的极点分布(双通道补偿控制)Fig.9 Poles distribution of bus/ with different motor powers (two-channel compensition control)
对比图5和图9发现:在采用双通道补偿控制后,随着电机负载功率增加,虽然极点仍然逐渐靠近虚轴,但都落在左半平面;电机功率135 kW时系统仍然稳定,表明采用双通道补偿控制在理论上可以有效提高母线电压稳定性,提升系统带载能力。
3 硬件在环仿真验证
为验证双通道补偿策略对提高母线电压稳定的有效性,开展硬件在环仿真实验。利用dSPACE软件生成控制器代码并下载到中央控制器;用Vortex程序搭建车辆动力学模型模拟实车场景;用RT-LAB1软件模拟车载电力系统、RT-LAB2模拟驱动电机系统,车载电力系统与驱动电机系统各部件参数、拓扑结构与前文理论分析一致,其中电机负载功率为采集的RT-LAB2软件中的电力信号计算所得;各模块之间建立FlexRay网络,构成硬件在环仿真环境,结构如图10所示。
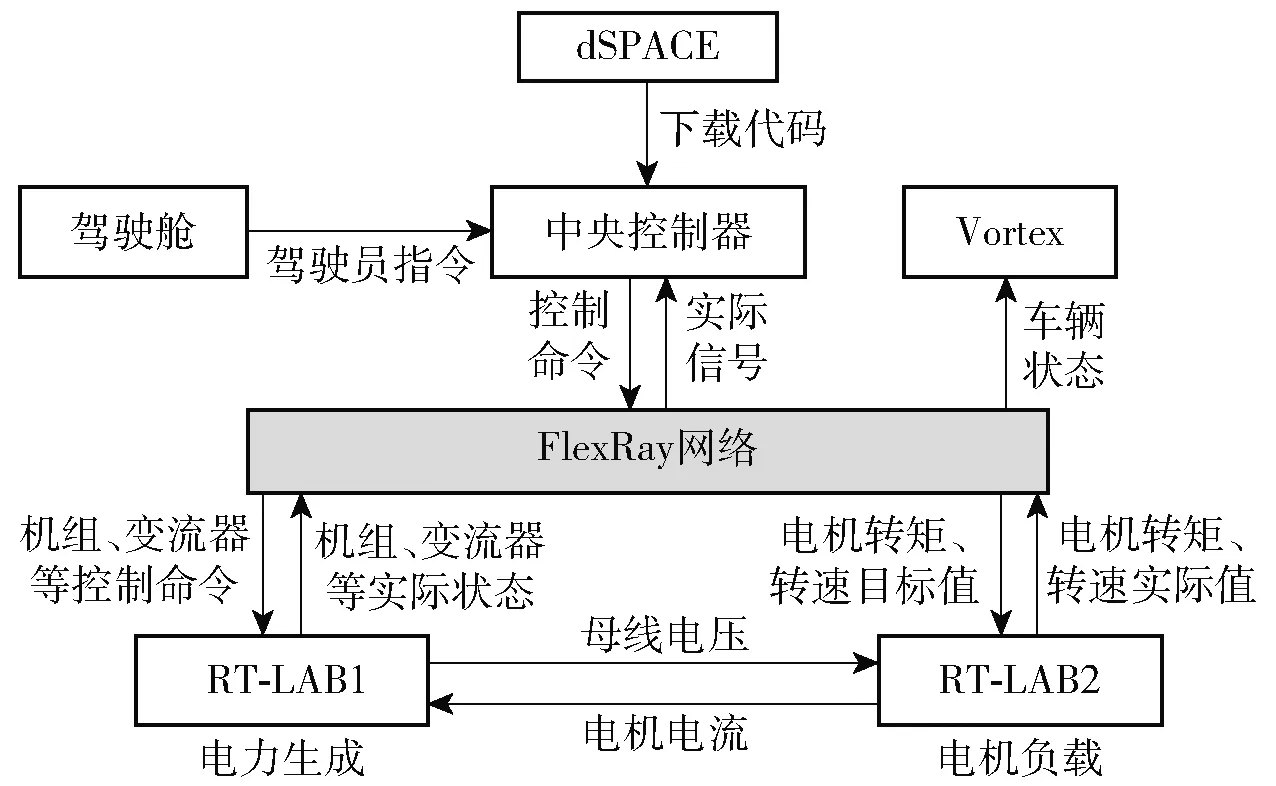
图10 硬件在环仿真系统结构Fig.10 Layout diagram of hardware-in-loop simulation
针对第2节提到的车辆突然加速或减速和加速过程中出现的母线电压波动问题,分别在无前馈控制、只有功率前馈控制以及双通道补偿控制的情况下进行对比仿真。为了便于分析,仿真设定车辆工作在8×8模式且载荷平均,即8个轮毂电机状态相同。
3.1 车辆突然加速和突然减速的仿真实验
车辆起始车速为20 km/h,单个电机转矩为115 N. 在0.2 s将单个电机目标转矩设置为143.75 N·m,车辆开始加速,0.4 s时车速为22.88 km/h;然后在0.4 s又突然将单个电机目标转矩设置为86.25 N·m,车辆开始减速,到0.6 s时车速降回20 km/h. 仿真结果如图11所示。

图11 车辆突然加减速仿真结果Fig.11 Simulated results when the vehicle suddenly accelerating and decelerating
从图11中可以看出,在0.2 s时随着电机转矩增大,电机总功率由83.73 kW阶跃至104.67 kW,车辆开始逐渐加速。母线电压仿真结果如表2所示。
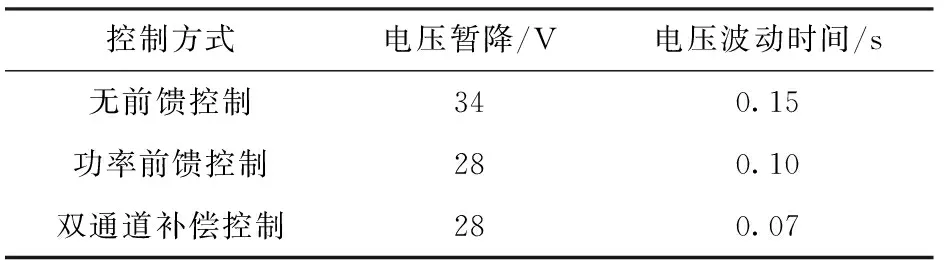
表2 车辆突然加速母线电压情况Tab.2 Bus voltage when the vehicle suddenly accelerating
由表2可知:当车辆突然加速时,采用功率前馈控制能够有效抑制母线电压跌落,减少恢复稳态时间;采用双通道补偿控制相比于只采用功率前馈控制虽不能进一步抑制母线电压跌落,但可以有效提高系统响应速度。
从图11中可以看出,在0.4 s时,随着电机转矩突然减小,电机总功率由119.73 kW阶跃至95.78 kW,车辆开始逐渐减速。母线电压仿真结果如表3所示。
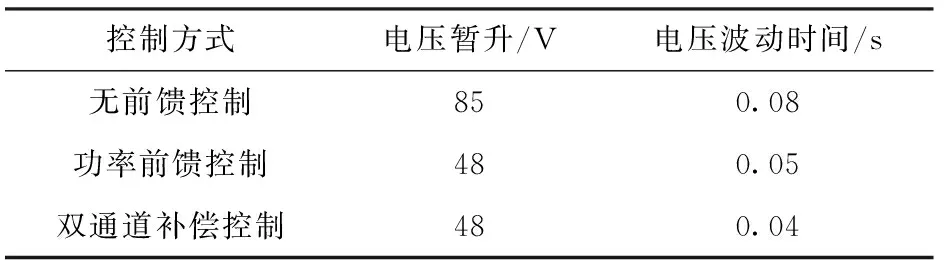
表3 车辆突然减速母线电压情况Tab.3 Bus voltage when the vehicle suddenly decelerating
由表3可知,当车辆突然减速时,采用双通道补偿控制能够有效抑制母线电压暂升,减少母线电压暂态时间。
结合车辆突加速或减速时母线电压仿真结果分析,可以看出采用功率前馈控制能够有效改善母线电压暂升或暂降问题,双通道补偿控制相比于只采用功率前馈控制虽不能进一步抑制母线电压暂升或暂降,但可以有效提高系统响应速度,减少母线电压波动时间。
3.2 车辆加速过程的仿真实验
车辆起始车速为20 km/h,在0.2 s开始以2.78 m/s2的加速度加速行驶,仿真结果如图12所示。
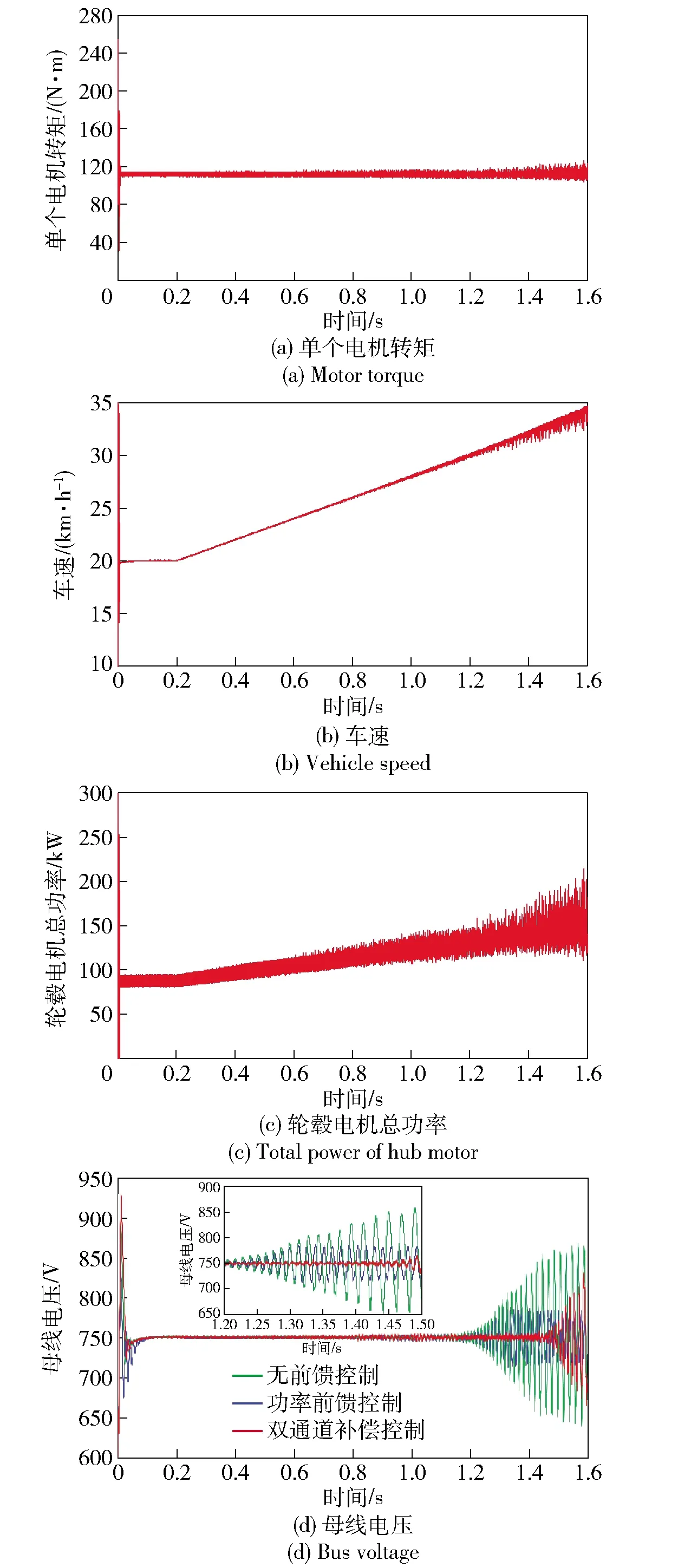
图12 车辆持续加速仿真结果Fig.12 Simulated results when the vehicle continuously accelerating
从图12中可以看出:车辆从0.2 s时开始加速,电机转矩基本保持不变,轮毂电机总功率逐渐增加;无前馈控制时,在1.2 s左右,由于负载负阻抗特性的影响母线电压开始振荡发散,系统失稳,此时车速大概为30 km/h,电机总功率为135.6 kW. 采用功率前馈时,同样在1.2 s左右,母线电压开始发散失稳,但相比无前馈控制时发散幅度要略小,表明采用功率前馈控制并不能有效抑制负载的负阻抗特性的影响。采用双通道补偿控制时,在1.45 s左右母线电压才开始振荡发散,系统失稳,车速大概为32.5 km/h,电机总功率为140.07 kW,此时电感限流值已达上限,因此系统由于功率不平衡而失稳;此时若保证系统稳定,则需要增加电感电流上限值。
结合图11和图12的仿真实验结果分析可知:功率前馈控制主要对车辆突然加速或减速引发的电压波动有较好的抑制作用;双通道补偿控制策略对两种母线电压波动都有较好的抑制作用,尤其是针对负阻抗特性诱发的电压振荡发散问题具有较好的抑制效果。
4 样车试验验证
为进一步验证双通道补偿控制策略的有效性,开展某型8×8电传动轮式装甲车样车试验,其内部车载综合电力系统各部件参数与前文理论分析和硬件在环仿真时的一致,部分电力系统如图13所示。整车电力系统参数同表1,选择在良好路面进行样车试验。

图13 某型8×8电传动轮式装甲车Fig.13 A 8×8 electrical wheeled armored vehicle
4.1 车辆突然加速的对比试验
在无前馈控制情况下,车辆由3.5 s开始加速,12.5 s加速结束;在双通道补偿控制情况下,从3 s开始加速,13.5 s时加速结束。试验结果如图14所示。
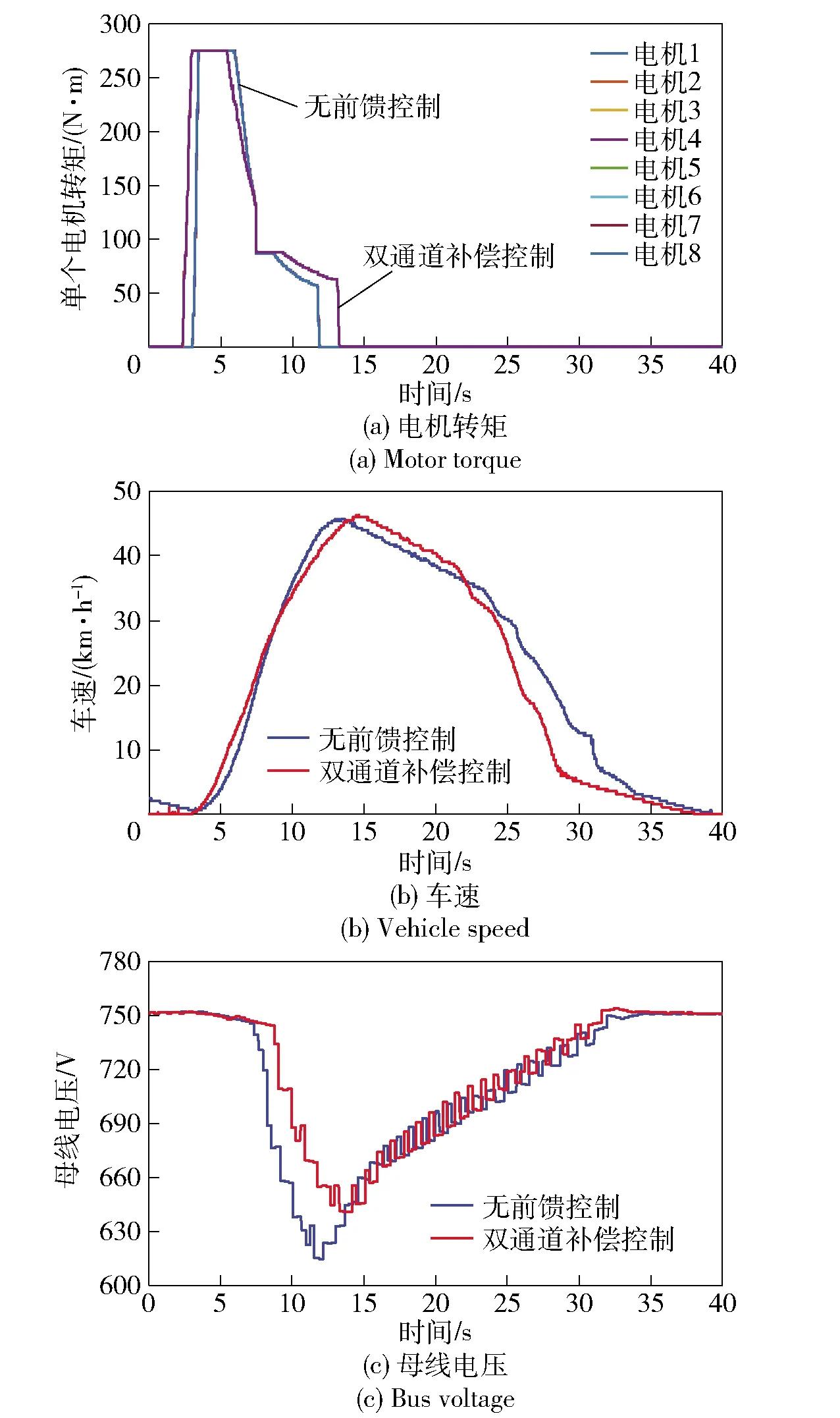
图14 车辆突然加速试验结果Fig.14 Test results when the vehicle suddenly accelerating
由图14可以看出:两次试验过程中,车辆状态基本一致,其结果具有可比性;在车辆开始加速时,虽然电机转矩很大,但车速很小,因此电机功率并不大,母线电压并没有马上跌落;随着车速增加,电机功率增大,母线电压开始跌落,直到车辆停止加速后开始恢复。并且,相比于无前馈控制,采用双通道补偿控制时母线电压开始跌落的时间较晚,表明控制策略已经起作用;电压跌落最低值比无前馈控制情况下约高50 V;从电压恢复稳态时间来看,也比无前馈控制时略微提前。试验结果与第3节仿真时母线电压变化趋势基本一致。
4.2 车辆在加速过程的对比试验
车辆从静止开始加速,试验结果如图15所示。
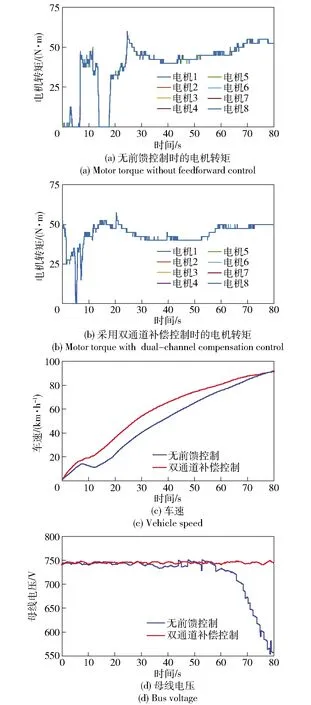
图15 车辆加速过程试验结果Fig.15 Test results when the vehicle accelerating
由图15可以看出:两次试验过程中电机转矩、车速变化基本一致,试验结果具有可比性。在进行无前馈控制加速试验时,14~18 s间由于车辆自身问题电机无转矩输出,导致前期车速小于采用双通道补偿控制时的车速,但后期加速度较大,最终车速基本一致;无前馈控制时,在53 s左右,母线电压开始波动下降,此时动力电池还未达到最大输出功率,车辆加速度也较小,因此考虑为负阻抗特性产生的影响。在采用双通道补偿控制后,直到车速加速到45 km/h,母线电压仍旧一直保持稳定。
以上试验结果与硬件在环仿真以及理论分析结果基本一致,再次验证了双通道补偿控制策略能够有效提高车载综合电力系统母线电压稳定性。
5 结论
本文以某型8×8轮式电传动装甲车为研究对象,为解决车辆在突然加速或减速和加速过程中出现的母线电压波动问题,在功率前馈控制的基础上,结合系统负载特性提出了双通道补偿控制策略。通过硬件在环仿真和样车试验进行了有效性验证。得到主要结论如下:
1)车辆突然加减速引起母线电压波动是由系统反馈环响应滞后引起的;加速过程中出现的电压波动是由电机负载的负阻抗特性导致系统正反馈引起的。
2)采用功率前馈控制可以有效抑制由负载功率突变导致的母线电压波动,但对电机负载的负阻抗特性诱发的电压波动基本无效。
3)采用双通道补偿控制策略能够有效抑制车载综合电力系统母线电压波动问题,改善系统稳定性能。