考虑交通流非线性特性的交通信号迭代学习控制策略
2021-11-13阎高伟任密蜂
闫 飞 李 浦 阎高伟 任密蜂
1.太原理工大学电气与动力工程学院 太原 030024
随着我国城市交通的快速发展,交通拥堵已成为各大城市普遍面临的交通难题,而交通信号控制作为调控城市交通流运行的最主要措施,其合理的信号配时对更好地利用现有的道路设施和缓解交通拥堵起着至关重要的作用.研究表明,自适应信号控制比固定配时控制能更有效地提高路网的通行效
率[1].如研究者们早期开发出的绿信比-周期长-相位差优化技术(Split-cycle-offset optimization technique,SCOOT)和悉尼协调自适应交通系统(Sydney coordinated adaptive traffic system,SCATS)等自适应交通信号控制系统,这些系统都能根据交通状况实时地对子区或路网的信号配时进行在线优化.但随着控制路网规模的不断扩大,路网交通状况愈加复杂,从而使得整个路网的协调控制变得十分困难[2-3].另一类常用的基于交通流模型进行信号配时的交通控制方法,因现实中交通流具有很强的不确定性和随机性,很难对其进行精确的数学建模,因此也难以达到理想的控制效果.侯忠生教授提出的基于排队长度均衡的交叉口信号配时思想能够实时动态调整各相位的绿灯时间,从而达到排队长度均衡的控制目标,并通过采用无模型的自适应控制方法,使得信号控制具有自学习和自适应特性,因此不依赖于交通流模型[4].此后,文献[5-6]基于排队长度均衡的控制思想分别采用不同方法对单个交叉口的信号控制进行了研究.
虽然交通流具有复杂的非线性动态特性,但从宏观角度看,一个城市特定区域的交通流,其每天的运行大体是一个重复的过程,而交通拥堵通常也发生在相同的时间和相同的地点[7].因此,充分利用宏观交通流运行时固有的周期性特征开展城市交通信号控制的研究,对提高城市路网的通行效率具有十分重要的意义.迭代学习控制(Iterative learning control,ILC)作为一种新型的学习控制策略,是由日本学者Arimoto 等[8]在1984年首次提出,目的在于解决有限区间内重复运行系统的控制问题.其不依赖于系统的精确数学模型,而是一种通过应用先前操作信息来获得控制输入使其能够产生期望输出,并通过控制输入不断地调整最终使实际的输出逼近理想输出的控制方法[9].与传统的控制方法相比,它具有适应性强、易于实现的特点,并且仅需要较少的先验知识和计算量.迭代学习控制的收敛性是指在迭代轴上具有收敛性,而在时间轴上能够实现完全跟踪,而传统在时间轴上渐进跟踪的收敛性从理论上讲需在时间足够大时才可能满足.很显然,具有完全跟踪收敛的迭代学习控制更适合城市交通信号控制.因此,本文结合迭代学习控制与城市宏观交通流运行特点,开展基于迭代学习的城市交通信号控制研究可充分利用迭代学习控制的优点,弥补传统基于模型的交通控制方法过分依赖交通流模型的不足,从而避开对交通流进行精确建模的难题.
近年来,在交通控制领域已有不少基于迭代学习的交通控制方面的研究成果,如文献[10]首次提出将迭代学习控制方法应用于高速公路匝道控制中.为进一步增强基于迭代学习的匝道控制方法的鲁棒性,文献[11-12]在现有反馈控制的基础上加入迭代学习控制,提出了基于迭代学习控制和反馈控制相结合的高速公路交通流控制方法,并讨论了输入受限等问题.考虑现实中的交通系统并非满足严格的重复性,文献[13]研究了当模型参数和期望轨迹迭代变化时迭代学习控制方法在高速公路交通流控制中的应用.文献[14]结合模糊控制理论与迭代学习控制设计了交通信号自适应控制器对单个交叉口进行控制.文献[15]将交通分配与交通控制相结合,采用迭代学习控制方法设计了交通信号控制器对路网进行控制.文献[16-18]将迭代学习控制应用于多交叉口的交通路网信号控制,通过对交叉口信号的迭代学习控制使路网各条道路的车辆数处于合理水平,以防止交通拥堵的发生,并分析了交通信号的迭代学习控制策略对路网宏观基本图的影响.文献[19]考虑城市交通流运行初态的不确定性,通过引入平均迭代算子,提出了一种具有非一致性迭代区间的迭代学习控制算法,并证明了算法的收敛性.
上述关于城市交通信号迭代学习控制的研究均采用了由Gazis 和Potts[20]早期提出的存储转发模型,该模型可将路段内的车辆出入动态情况在整个采样周期内看做是连续的,避免了更多离散变量的引入,从而在更多的控制方案中得到应用.如前所述,城市交通流具有复杂的非线性动态特性,采用线性的存储转发模型无法准确地描述交通流的动态特性.鉴于此,本文在存储转发模型的基础上结合路段内交通流的运行特点,提出了一种描述城市交通流的非线性动态模型.同时,结合宏观交通流固有的周期性特征,设计了交叉口信号的迭代学习控制策略,并对其收敛性进行了分析.该方法通过对交叉口信号的迭代学习控制,使交叉口各进口道的车辆排队长度逐渐趋于均衡,从而使绿灯时间得到更充分的利用,有效提高了路网的通行效率.最后通过仿真实验进一步验证了该方法的有效性.
本文的组织结构如下:第1 节给出了描述交通流动态特性的非线性交通流模型;第2 节给出了对所研究问题的描述;第3 节给出了考虑交通流非线性特性的交叉口信号迭代学习控制策略并对其收敛性进行了分析;第4 节为仿真研究;第5 节是本文的结论.
1 交通流模型
1.1 交通流模型及状态空间表达


图1 交叉口相位示意图与路段交通流模型Fig.1 The intersection phase and road traffic flow model






2 问题描述
2.1 基本假设


2.2 控制目标
根据路网的宏观基本图理论,在路网条件和车辆数相同的情况下,路网内各道路的车辆密度分布越均衡,路网的通行效率就越高[24].而各道路的车辆排队长度在一定程度上反映了各道路的车辆密度.因此,受文献[4]提出的排队长度均衡控制思想的启发,本文拟采用该思想对交叉口信号进行控制,控制目标为寻找合适的交叉口相位绿灯时间,尽可能使路网中同一交叉口各相位所对应的车辆排队长度与该相位的绿灯时长相适应,保证交叉口各相位的绿灯时间得到充分利用.
以具有4 个路口的交叉口为例,同一交叉口各路口之间车辆排队长度的差值可任选其中某一路口的车辆排队长度作为参考,例如假设选取路口1 的车辆排队长度作为参考,则可将其他路口的车辆排队长度与路口1 的车辆排队长度的差值作为向量,假设该交叉口在第k时刻的4 个路口的排队长度分别为y1(k),y2(k),y3(k),y4(k),则该交叉口各路口车辆排队长度的差值情况可描述为


3 迭代学习控制策略与收敛性分析









4 仿真研究
为了验证本文所述的交叉口信号迭代学习控制策略的有效性,本文选取了太原市某区域的部分道路作为仿真测试区域,道路结构简图如图2所示,并通过VISSIM 和MATLAB 软件进行仿真研究实验.该区域共由9 个交叉口和23 条双向通行车道组成,各路段所包含的车道数如表1,每条车道宽约为3 m,根据HCM2000 手册可估算出每条单向行驶车道的饱和流量为1 800 veh/h.

图2 太原市某区域路网结构简图Fig.2 The road network structure of one region in Taiyuan

表1 各路段车道数Table 1 The number of lanes in each link
4.1 仿真实验方案介绍

3)迭代学习控制.仿真时迭代学习控制的期望为各交叉口的车辆排队长度差值为0.
具体仿真参数设置如下:不同路段间的转向率直行:左转:右转均设置为3 :1 :1;所有交叉口均设置为东西和南北2 个相位;各交叉口信号周期时长均为120 s;迭代学习控制和模型预测控制方案绿信比初始设置为1 :1;每次仿真时长为3 600 s,迭代学习控制的仿真迭代次数为20 次;各路段输入的起始流量如表2所示;路网各交叉口的学习增益β取值如表3所示,且均满足收敛条件‖I -βCD‖<1 .其他仿真参数采用VISSIM 的默认值.

表2 路网的输入流量(veh/h)Table 2 The inflows of the road network(veh/h)

表3 交叉口的迭代学习增益Table 3 The iterative learning gains at different intersections
仿真中分别采用上述的三种控制方案对各个交叉口相位的车辆排队长度差值,车辆的实际排队长度,车辆的平均延迟时间,车辆平均停车次数以及所选区域内车辆的平均速度进行对比研究,仿真结果如图3~9所示.
4.2 仿真结果分析
通过仿真得到固定配时,模型预测控制和迭代学习控制三种方案下的交叉口各相位的车辆排队长度的差值,如图3所示.图4 和图5 分别给出了不同控制方案下交叉口4 和交叉口9 各相位的实际车辆排队情况.此处选择交叉口4 和交叉口9 是由于交叉口4 为该区域的主要干道交叉口,而交叉口9为不同于其他路口的丁字路口,交通情况复杂容易造成拥堵.图6 反映了交叉口车辆的平均排队长度差值随迭代次数的变化情况.上述仿真实验及结果分析表明当信号控制方式为固定配时时,各交叉口车辆的平均排队长度差值波动相对较大,而迭代学习控制和模型预测控制两种自适应控制方案下车辆的平均排队长度差值波动相对较小.从图3(b)和图3(c)可以看出,与模型预测控制相比,迭代学习控制方案下各交叉口车辆的平均排队长度差值波动更小,表明车辆在路段中的分布更加均衡.与此同时,通过仿真得到路网中车辆的平均延迟时间如图7所示,可以看出,与固定配时和模型预测控制方案相比,经过20 次迭代学习控制后,路网中车辆的平均延迟时间明显减少;图8 的仿真结果为车辆的平均停车次数,可以看出迭代学习控制方案下车辆的平均停车次数整体也少于固定配时和模型预测两种方案下车辆的平均停车次数;关于3 种控制方案对路网中车辆平均速度的影响,通过图9 可以看出,进行20 次迭代学习控制后路网内车辆的平均速度整体也略高于固定配时和模型预测控制配时下车辆的平均速度.综合仿真结果的分析,迭代学习控制方案可在不改变道路设施的基础上,通过对交叉口信号的控制调节,能有效提高路网的通行效率.

图3 三种控制方案下各交叉口相位车辆排队长度差值Fig.3 The differences of queue lengths at different phases of each intersection for the three control schemes

图4 三种控制方案下交叉口4 各相位的车辆排队情况Fig.4 The queue lengths at Intersection 4 for the three control schemes
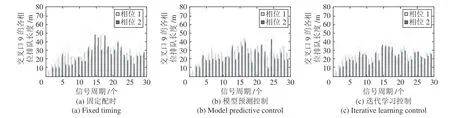
图5 三种控制方案下交叉口9 各相位的车辆排队情况Fig.5 The queue lengths at Intersection 9 for the three control schemes

图6 平均车辆排队长度差值随迭代次数的变化情况Fig.6 The average difference of queue lengths of all intersections after each iteration

图7 三种控制方案下路网的平均延迟时间Fig.7 The average delay time of road network for the three control schemes

图8 三种控制方案下路网的平均停车次数Fig.8 The average number of stops for the three control schemes

图9 三种控制方案下路网内车辆的平均速度Fig.9 The average speed of vehicles for the three control schemes
5 结束语
针对城市交通流具有的非线性特性,建立了描述交通流运行过程的非线性交通流排队模型.并在建模的基础上利用宏观交通流所固有的周期性特征,设计了交叉口信号的迭代学习控制策略,证明了迭代学习律的收敛性.最后以太原市某区域路网为例,通过经典的韦伯斯特法,模型预测控制算法和本文方法进行了对比仿真实验.实验结果表明,通过对交叉口信号的迭代学习控制,可以使交叉口进口道的车辆排队长度逐渐趋于均衡,提高交叉口信号有效绿灯时间的利用率,从而改善路网的通行效率.迭代学习控制方法因其计算量小,从而易于对路网进行集中式控制.但随着控制路网规模的增大,不同区域间交通流特性的差异性会增强.因此,为了适应大规模城市路网的控制,未来开展对分散式城市道路交通信号迭代学习控制方法的研究将会有更大的应用价值.
