超宽带室内定位算法综述
2021-11-10王争蒋浩晨高娟马俊成谢双
王争,蒋浩晨,高娟,马俊成,谢双
(电子科技大学成都学院,四川成都611731)
目前,对于室外条件下高精度的位置获取往往依赖于全球卫星定位系统(Global Navigation Satellite System,GNSS)。但由于室内条件的特殊性,卫星信号在室内环境下的覆盖率较差,故室内定位技术难以依赖GNSS 来实现。据研究表明,人们平均有超过80%的时间在室内度过,所以对室内位置服务的需求将更加迫切[1]。
室内定位是指在室内环境中实现位置的定位,主要借用基站定位、可信定位、伪卫星定位、无线通信和室内地图等多项技术,使在复杂的室内环境中能实现人员或物体之间的位置信息识别[2]。目前,国内外多家企业、高校院所也都在室内定位领域开展研究并取得了卓越成果[3]。
常见室内定位技术有无线保真(Wireless Fidelity,WiFi)定位技术、蓝牙(Bluetooth)定位技术、紫蜂(ZigBee)定位技术、射频识别(Radio Frequency Identification,RFID)定位技术和超宽带(Ultra Wide Band,UWB)定位技术,而其中UWB 通信技术是一种新型的无线通信技术,它无需同传统通信系统具有一样的载波信号,而是将极窄脉冲序列通过正交频分调制或直接排序的方法,使其拓展至同一频率范围内,故可实现在较宽的频谱上传输极低功率的信号[4]。
与传统的窄带通信系统相比,UWB 室内定位技术具有功耗低、安全性高、定位精度高和抗干扰能力强等优点,可适用于工业制造、养老医疗、物流仓储和公共安全等应用场景,在室内定位技术市场中具有良好的市场前景,因此文中选择UWB 室内定位技术并对其展开研究论述。
1 UWB定位技术算法研究
经过近年来的研究发展,无线定位技术算法可以分为两类,分别是依托距离信息(如:TOA 算法、TDOA 算法和AOA 算法等)和无需依托距离信息(如:质心定位法、DV-hop 算法和指纹匹配法等)的定位算法。而UWB 室内定位系统通常采用的是依托距离信息的定位算法,其原理是根据基站与目标节点间的位置关系与其传输信号的特点构造方程组,再将基站与目标节点间所测量的相关信息(如:到达时间、到达角度与飞行时间等)带入其方程组便可获得具体的目标位置信息。而其能否获得精确的距离信息是研究UWB 室内定位算法的关键,文中将对UWB 室内定位算法做详细阐述论述。
1.1 TOA定位算法
TOA(Time of Arrival)即到达时间定位算法,指目标节点向基站发送带有测距信息的无线电波信号,基站接收到该特定信号后做出响应,并记录下其节点从发送信息到基站做出响应所花费的时间。而无线电波在空气中是以光速传播的,所以基站和目标节点之间的距离可以估算出来[5]。这里基站通常需要3 个及以上的已知位置参与测量,此时可根据三角定位法和几何公式建立方程组并求解来确定目标节点所在的位置。
图1为三边定位算法模型,已知基站1、基站2 和基站3 的坐标,分别为(x1,y1)、(x2,y2)和(x3,y3),假设待测目标节点坐标为(x,y),待测目标节点在t时刻发送信号,则3 个基站接收到该信号的时间分别为t1、t2和t3,则可得到三边算法的定位算法公式为:

图1 三边定位算法模型

根据式(1)可求得目标节点的位置坐标。
由于TOA 定位算法的计算完全依赖于时间,要求系统具有极高的时钟及同步精度,即使是很小的时钟同步误差乘以光速都会被放大很多倍,同时会带有多径效应、反射和噪声等干扰,会对室内定位的精确度造成较大的影响[6]。
1.2 TDOA定位算法
TDOA(Time Difference of Arrival)即到达时间差定位算法,是对TOA 定位算法的改进。指选定一个基站作为参考基站,结合其他基站与参考基站建立以基站为焦点的多条双曲线,与双曲线上的点到焦点的距离差为目标节点,到其他基站的距离差的双曲线方程,通过多条双曲线的交点可得到目标节点所在的位置。其中目标节点到各基站的距离为通过TOA 测距方式得出目标节点到各基站之间的TOA值,再乘以光速得到[7]。
图2为TDOA 定位算法模型图。已知基站1、基站2 和基站3 的坐标,分别为(x1,y1)、(x2,y2)和(x3,y3),假设待测目标节点坐标为(x,y),则可得到TDOA 算法公式为:
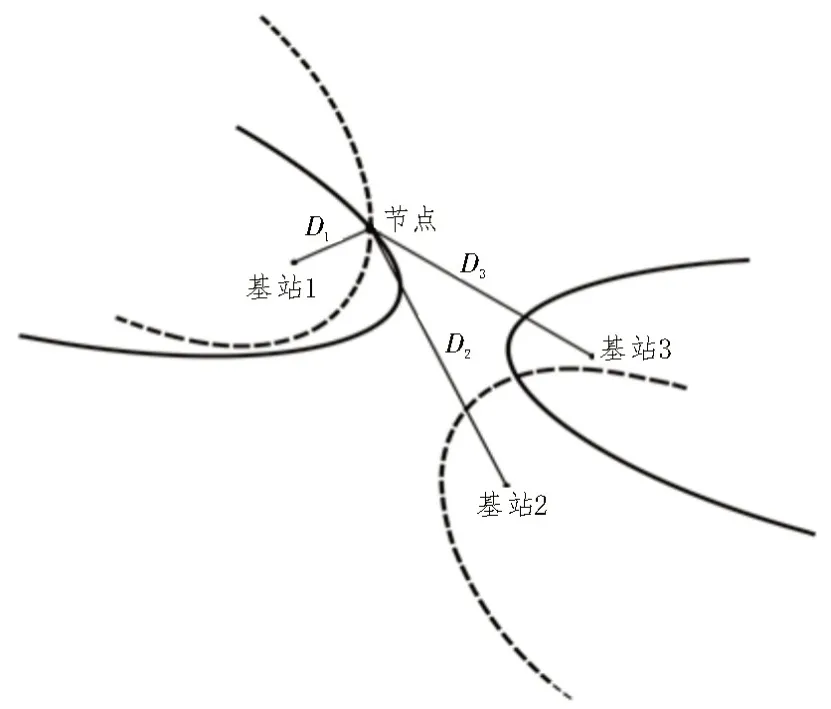
图2 TDOA定位算法模型图

根据式(2)可求得目标节点的位置坐标。
TDOA 定位不必进行基站和目标节点之间的同步,而只需要基站之间进行同步。因为基站的位置是固定的,所以基站之间进行同步比基站和目标节点之间进行同步更容易实现。然而,该方法对硬件的要求较高,在非视距或更复杂环境下,其定位精度会大大降低。
1.3 AOA定位算法
AOA(Angle of Arrival)即到达角度定位算法。是通过两个及以上的基站,设置阵列天线或方向性天线来获取目标节点发射无线电波信号的角度信息来估计基站与目标节点之间的距离。
图3为AOA 定位算法模型图。已知基站1 和基站2 的坐标,分别为(x1,y1)和(x2,y2),假设待测目标节点坐标为(x,y),以基站1、基站2 和待测目标节点的垂直线作为基准方向。则可得到:
根据子弹的弹道模型,利用Matlab软件编制子弹飞行弹道仿真程序,该程序在给出抛射点的母弹速度、抛射高度、抛撒时间、弹道倾角的条件下,应用四阶龙格库塔法可解得子弹弹道;进而通过画图程序生成落点分布、各枚子弹在三个坐标的变化以及分速度的变化坐标图。图2为计算子弹弹道仿真流程图。

图3 AOA定位算法模型

根据式(3)可求得目标节点的位置坐标。
AOA 定位系统相比其他定位系统,结构简单,只需要两个基站便可定位。但极易受到信号的多径效应或非视距环境的影响,使其定位精度不理想。且其对角度的测量要求较高,需要天线阵列具有高灵敏度和高空间分辨率,从而增加了其实现和维护的成本。
1.4 TOF定位算法
TOF(Time of Flight)即飞行时间定位算法。是一种双向测距技术,通过测量UWB 信号在基站与目标节点之间往返的飞行时间来计算。
图4为TOF 测距原理图,目标节点首先向基站发送测距请求信息(POLL),基站收到测距请求信息(POLL)后进行处理,经过一小段时间处理后向目标节点回复确认信息(ACK)。将发送端发出的信号和接收回应的时间间隔记为Ttot,接收端收到信息和发出回应的时间间隔记为Ttat,则可得到将其再乘以光速便可算出目标节点到基站的距离,即D=Ttof×c(c 为光速)。当有多个基站共同定位时,可采用如图1所示的三边定位算法模型来得到目标节点的位置。
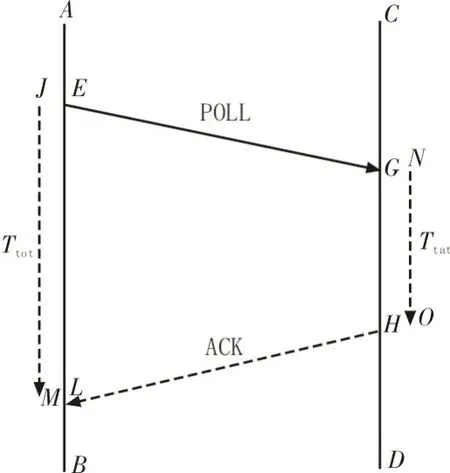
图4 TOF测距原理图
TOF 定位算法的时间取决于时钟精度,很依赖信号发出和接收时的精确时刻,由于时钟晶体存在频率偏差,有时钟偏移的影响,就需要有高精度的硬件作为支撑,使成本上升[8]。
1.5 融合定位算法
通过以上多种UWB 室内定位技术算法的分析,TOA、TDOA、AOA 和TOF 算法各存在不同的优势,但在针对于复杂的室内环境下,单纯依靠一种算法也有各种局限。当前室内定位技术必然会朝着多技术和算法融合的方向发展,以充分发挥单一技术的优势,来弥补彼此间的不足,从而提升定位精度及稳定性,降低系统的成本,来满足不同要求所提出的技术挑战,达到最优的解决方案。
文献[9]分析了基于TDOA 算法与AOA 算法的融合定位方法,并提出了分离变量的约束加权最小二乘(Separate Constrained Weighted Least Squares,SCWLS)算法,有效解决了目标节点恰好在或者靠近圆阵列中心时测量产生奇异矩阵的情况,从而提高了测量精确度。
文献[10]提出了一种通过两次卡尔曼滤波来实现非视距环境中TDOA/AOA 融合定位方法。先是利用卡尔曼滤波对TOA 测量值进行消除NLOS 误差的预处理,再将TOA 测量值输入到卡尔曼滤波器来实现TDOA/AOA 混合定位。在未增加算法整体复杂度的前提下,有效地改善了单独利用TDOA 或AOA 定位的定位精度。
文献[12]提出了一种由捷联惯性导系统(Strapdown Inertial Navigation System, SINS)与UWB室内定位技术相组合的融合定位方法,该系统的测距部分由SINS 系统与UWB 系统构成,SINS 系统通过内部固连的陀螺仪与加速度计,实时获取目标节点的位置与姿态信息,而UWB 系统通过TODA 算法得到目标节点的位置。然后将这两个系统的位置差值作为观察量,通过采用松组合方式的扩展卡尔曼滤波器进行解算来获得目标节点的精确位置信息,其中由卡尔曼滤波器解算出来的结果会反馈给SINS系统,以确保SINS 系统的定位精度。该定位方法可以有效降低SINS 和UWB 系统各自的固有误差,增强了系统在非视距环境下对测量值的判别能力与重构能力,从而提高了定位系统的精度与稳定性。
2 影响室内定位的主要因素
2.1 非视距传播
无线信号在传输过程中的传输条件分为有视距环境(Line of Sight, LOS)和非视距环境(Non Line of Sight,NLOS)[13]。在视距环境下,无线信号可以无障碍地在发送端和接收端之间直线传播,但要在第一菲涅尔区(First Fresnel Zone)内,才能够进行高质量的信号传输。在非视距传播的环境下,因在传输过程中有障碍物的阻挡,无线信号只能通过反射、折射、散射和衍射的方式到达接收端,最终会导致接收端接收到大量的失真信号,从而影响室内定位的精确度,因此许多改进工作都基于此开展。如文献[14]采用卷积神经网络-LS/WLS 算法,文献[15]提出一种基于布谷鸟搜索算法(Cuckoo Search,CS)和BP(Back Propagation)神经网络联合优化的TDOA 定位算法,文献[16]提出的一种基于TOA 的三维室内定位LMR算法等来减小NLOS 环境所带来的误差。
2.2 多径效应
无线信号在传输过程中因受到障碍物的干扰而产生反射、折射、散射和衍射,使各路信号到达接收端的时间不同,进而导致各路信号按各自相位、幅度相互叠加而造成干扰,带来信号衰减、时延不同步、极化改变和链路不稳定等一系列问题。目前抑制多径效应的方法主要有:利用窄相关码跟踪环、平滑伪距和相位测距等方法来提高接收机的距离测量精度和采用抗多径天线等。
3 UWB室内定位技术发展趋势
3.1 从二维到三维
由于物联网技术的日渐成熟带动了室内定位技术的蓬勃发展,而基于UWB 的室内定位技术日益成为室内定位领域的研究热点,但目前无论国内外的高校、企业或研究所对于UWB 室内定位系统的研究大多仍然停留在二维定位的应用上[17]。而现实生活的空间是三维的,如大型多层商场、停车场,二维室内定位技术难以满足实际生活中更高的定位需求。当二维环境上升到三维环境,如何多楼层对移动目标精准定位与解决空间定位盲点和三维多复杂NLOS 环境的影响将是今后主要的研究方向。
3.2 室内定位技术的多融合
随着室内定位技术的逐渐发展,越来越多的室内定位理论和方法相继被提出,但受成本、环境和技术等限制,现阶段的室内定位技术各有千秋。于是将多种室内定位技术相融合来减小成本、降低功耗和提升系统定位精度与稳定性是未来室内定位技术的发展趋势。
3.3 5G无线通信与室内定位
5G 无线通信采用高频或毫米波通信,具有带宽高、时延低、容量大、覆盖广等特点,适合应用于室内定位。一方面,毫米波波束窄、频率高,且具有良好的方向性,可以实现更高精度的测距与测角。另一方面,5G 利用大规模阵列天线,通过波束成形技术,使波束拥有更高的分辨率,也可以进行高精度的测距与测角,即5G 支持TDOA、AOA 和TOF 等定位方法[18]。此外,5G 的高带宽特性可以填补UWB 与传统窄带定位技术之间1~3 m 定位精度的空缺,所以将5G 无线通信与各室内定位技术相结合,可极大地提升室内定位系统的普适性,使定位精度更高、灵活性更强、成本更低[19]。
4 结束语
该文从UWB 室内定位技术的基本概念出发,通过与其他室内定位技术对比,给出了选择UWB 室内定位技术的原因。其次分析了UWB 室内定位技术的多种算法,结合自己的研究与思考,得出了融合定位算法将会是室内定位技术未来必然发展方向。但国内对UWB 室内定位技术的研究仍处在导入期,现在还没有形成一个有力的组织来制定统一的行业标准。但任何新的技术领域都需要一定的发展过程,相信随着物联网时代的快速发展与以5G 无线通信为首的高新技术的兴起,UWB 室内定位技术也必将会为定位技术领域增添浓墨重彩的一笔[20]。
