面向大型构件的龙门式喷砂机器人系统
2021-11-10琚凯征陈再玉赵连玉王巨涛
琚凯征,陈再玉,赵连玉*,王巨涛
(1.天津理工大学a.天津市先进机电系统设计与智能控制重点实验室,b.机电工程国家级实验教学示范中心,天津300384;2.海洋石油工程股份有限公司特种装备公司,天津300461)
喷砂除锈对于目前的机械制造、船舶工程、建筑行业等重大领域有着至关重要的作用,属于污染系数很高的行业。目前,针对这一行业在大型构件的喷砂除锈上来说,国内仍然处于手工状态,智能化程度十分低下,劳动者处于矽肺等职业病常发生的工作环境。基于人工智能技术,研究出能够解决大型构件的喷砂机器人技术,已经成为相关行业迫在眉睫的任务。针对这一情况,采用了移动龙门式结构、天车带动喷砂小车,及下方轨道一并行走等设计,使用高效的喷砂技术,解决大型构件的除锈问题。同时对喷砂小车的主要受力部件车底梁进行了有限元仿真,验证了小车方案满足结构强度要求。
1 喷砂机器人现状及方案设计
1.1 国内外现状
国内对于龙门式喷砂机器人的研究较晚,20世纪初喷砂除锈大部分为手工作业。近十几年来,智能化设备兴起,早期以爬壁机器人[1-2]为主,爬壁机器人[3]主要以吸附工件表面形式来作业,该型机器人对被喷工件表面要求较高,不能满足所有的喷砂工件,尤其对于大型工件如20 m×20 m甲板来说,采用爬壁机器人来完成不太现实。娄伟、张军[4-5]和王希涛[6]做过对大型油罐喷砂机器人规则的零件除锈,并同时对控制系统进行了详细的设计[7]。国内大部分喷砂作业都以小型喷射式设备为主,其中北京的昊为科技有限公司对喷砂机器人有了较为成熟的产品,主要有龙门式、侧壁式、内壁式3种,其中的8轴至11轴喷砂机器人的技术指标已达业内领先水平。杜启荣等[8]发明了“衣架机器人”,解决了大型桥梁涂漆问题,但结构较为单一,只能解决桥梁桁架结构。国外的喷砂行业起步较早,技术也相对比较成熟,文献[9]中,荷兰的AIRBLAST公司喷砂设备较为先进,喷砂机采用双舱体结构持续作业,另外该公司还设计了喷砂工艺车间,标准化的喷砂工业流程。美国的GRACO公司生产了用卡车装载的高性能磨料喷砂机器人以及相配套的可移动设备,能够实现大型构件的移动喷砂作业。芬兰的BLASTMAN公司研制的天车式机器人采用多级伸缩杆的形式完成整个喷砂淸理室的移动操作,同时末端采用多轴机械臂的形式,实现多角度、多方向的移动,虽然可以满足喷砂作业的需求,但是对工作环境要求较高,需要较为完备的喷砂车间。
1.2 自动喷砂的总体方案
图1是喷砂系统的机电组成。
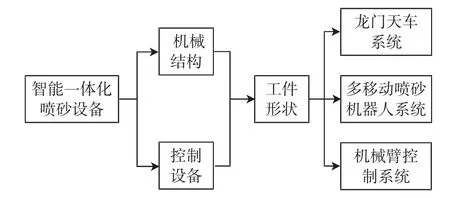
图1 喷砂系统的机电组成Fig.1 Mechanical and electrical components of sandblasting system
针对大型喷砂工件,主要以船舶甲板为主,尺寸为20 m×20 m×1.50 m,大部分结构为工字钢和槽钢,在进行喷砂任务时,将从甲板的上方和下方同时进行喷砂作业。针对上述喷砂工件的形状结构特点,提出的自动喷砂系统可以分为龙门天车系统、多移动喷砂机器人系统以及喷砂机器人机械臂控制系统,这些系统相互结合,相互合作实现最优化效率,钢材表面的技术要求及工作条件如表1所示。
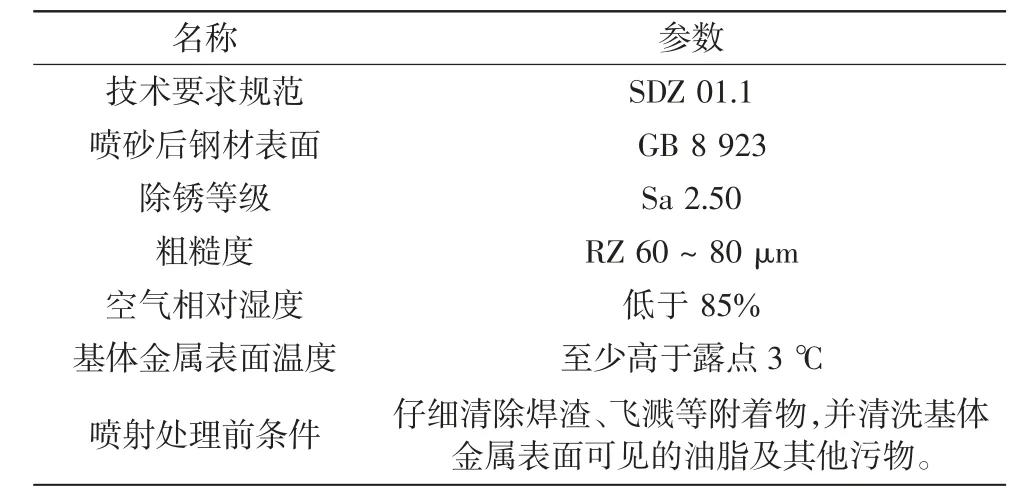
表1 技术要求及工作条件Tab.1 Technical requirements and working conditions
1.3 工艺参数
1)磨料选择铸铁砂,粒径为0.50~1.50 mm。磨料要求有棱角、清洁、干燥、没有油污。
2)喷射处理所用的压缩空气经过冷却装置及油水分离器处理,以保证压缩空气的干燥、无油。压缩空气压力为0.70 MPa[10]。
3)喷嘴到基体金属表面保持100~300 mm的距离[3]。
4)喷嘴的孔口直径由于磨损而增大,当其直径增大25%时需更换。
1.4 龙门结构的优势
1)节省人力,提高工作效率,提高喷砂除锈精度。
2)近年来的喷砂机器人[11]只能针对小型部件的喷砂除锈,无法解决超大型工件的作业,这是本方案的一大亮点。
3)喷砂料运输的问题,喷砂机器人存在物料管运动过程折弯的问题,折弯越大,喷砂效果越差,龙门结构能够很好处理这个问题。
4)针对国际上龙门式喷砂机器人的结构,对喷砂工作厂房的环境要求较高,从而导致喷砂系统成本较高,龙门结构能够使成本极大降低。
2 自动喷砂机器人概述
2.1 整体结构设计
图2 是龙门喷砂系统整体结构,图中模拟大型船舶甲板被龙门喷砂机器系统清洗的整体图。喷砂机需要喷涂的工件尺寸较大,以船舶甲板为例,整体尺寸有几米到几十米范围之大,所以甲板在运到喷砂清洗地之后需要拖板车运进清洗工作室,工件到位固定好后,拖板车撤离。下方有支撑结构,支撑结构由工业液压缸、小基站组成。工业油缸可以进行一定程度的升降控制,当喷砂小车到达工件时,靠近小车的液压缸自动下降,让底部轨道通过,喷砂小车处理完以后,前一级支撑结构恢复原位,工作室可以进行封闭处理,龙门天车在电机的带动下在天车导轨上匀速运动,同时沙尘隔离软帘门在绕线柱的拖动作用下向下运动阻挡沙尘,避免沙尘肆意外泄造成环境污染。与天车相接的喷砂小车在确定甲板工件之后左右移动,喷砂枪可上下摆动。下方也安排有喷砂小车和上方喷砂小车协同运动,保证甲板的上下面同时处理,喷砂罐被固定在龙门结构上随结构整体移动,解决了以往喷砂物料运输麻烦的问题,运动到末端,天车做返回运动,保证了喷砂工艺要求,实现大型构件的喷砂目标。
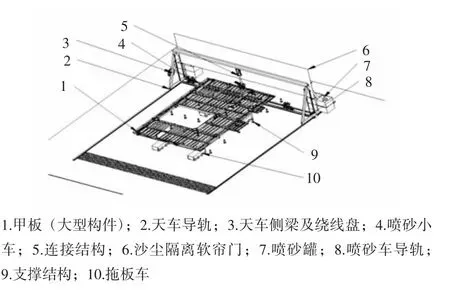
图2 龙门喷砂系统整体结构Fig.2 Overall structure of gantry sandblasting system
2.2 喷砂机器人结构
图3是喷砂机器人结构。主要是喷砂小车底盘带动可移动的喷砂软管,小车上端有6个喷砂枪,可以实现甲板的全方位清洗。同时安装有5个电推杆,可以实现固定台一定范围内的上下移动,从而方便一些有厚度的工件。每个喷砂枪前端都有一根导向杆和一个可移动的升降杆组成,保证喷砂枪的可移动性,侧面安装有侧喷旋转电机,带动固定转轴,实现一定范围的摆动,从而完成喷砂作业。
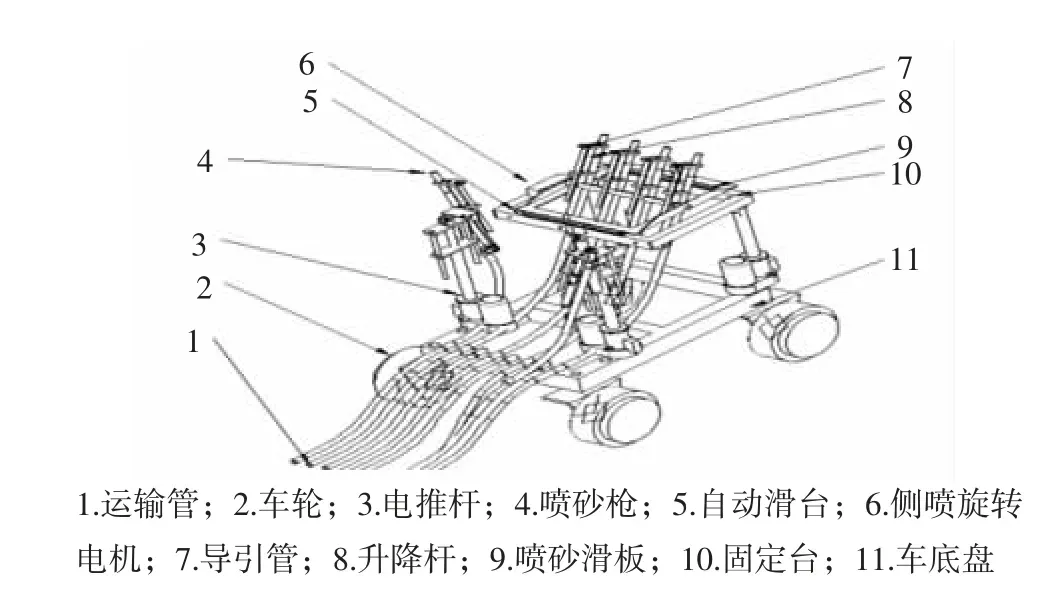
图3 喷砂机器人结构Fig.3 Structure of sandblasting robot
2.3 龙门结构
图4 为龙门结构,由于整体龙门不停运动,会降低龙门的使用寿命,为了提高结构稳定性,两端为三角形结构,同时内部放有两根横梁做内部支撑,提高整体稳定性。下端放有车轮,沿着固定轨道运动,天车下部放有工字钢,供移动轮运动,底端有喷砂小车导轨,导轨之间放有回收地漏板,喷砂小车喷砂途中会掉落大量砂砾,回收板能很好解决此问题。

图4 龙门结构Fig.4 Gantry structure
2.4 支撑单元
图5 为支撑单元模型,采用工业液压油缸,旁边是液压基站,为液压油缸提供动力,液压缸用来对大型板件的支撑,同时采用分布式的布局,能够做到对大型工件的有效作业,底部为万向脚轮,能够360°地自由移动,更好地实现对各类工件的喷砂处理。

图5 支撑单元模型Fig.5 Model of support unit
2.5 天架移动轮
天车下方是工字钢结构,所以采用驱动轮结构,电机位于结构底部,能够很好地避免与其他结构产生干扰,前端装有电磁制动器,很好地进行运动部件减速、停止或保持停止状态,通过齿轮传送带动驱动轮,前端放有导引机构,能够更好地在工字钢上运动。驱动轮和从动轮通过装置板焊接连接在一起,能够实现同时运动,天架移动轮如图6所示。
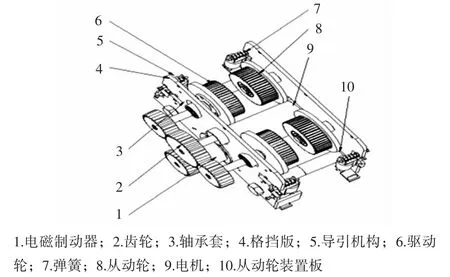
图6 天架移动轮Fig.6 Moving wheel of sky tower
3 喷砂机器人静力学分析
喷砂机器人容易变形的部分主要有喷砂管、固定台、车底盘、导向杆、滑板等部分,其中喷砂管、车底盘、固定台是较为重要的部分,它们的强度和刚度会直接影响喷砂机器人在工作中对工件作业的完成程度。为了不影响机器人对工件作业的准确度,需要对其进行静力学分析及优化,下面以承重部位最重的底盘分析为例。
3.1 底盘的约束分析计算
底盘以150 mm×100 mm×8 mm的矩形方钢焊接而成,主要受来自电推杆、喷砂枪、旋转电机、自动滑台和其他一些零部件的重量。其中单个电推杆的重量7 kg,单个喷砂枪重量5 kg,侧喷旋转电机重量10 kg,自动滑台外加固定台20 kg,添加在车底盘上,车底盘模型如图7所示。
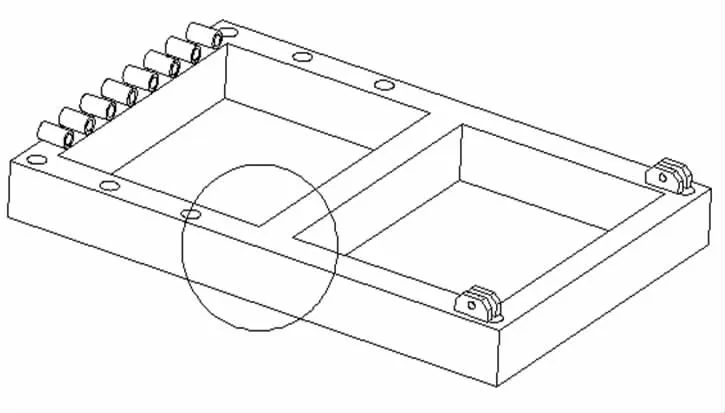
图7 车底盘模型Fig.7 Chassis model
图7 中圆形圈A处为整个结构中弯曲变形最严重的地方,车底盘的简化支梁模型,如图8所示。
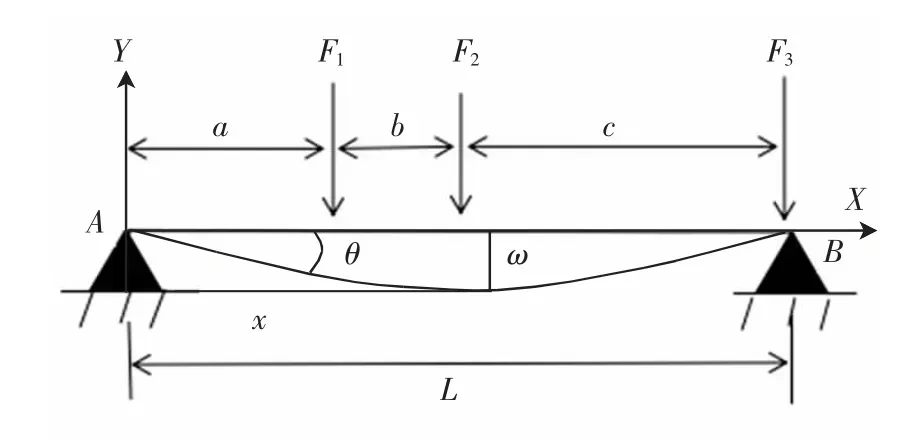
图8 车底盘的简化支梁模型Fig.8 Supported beam model of vehicle chassis

3.2 有限元分析
首先在ANSYS中设定好梁对应的结构模型及材料属性,本文设计的喷砂小车的钢管材料为结构钢,质量密度为7.85 g/cm3,弹性模量为166 700 MPa,泊松比为0.30,屈服强度为235 MPa,屈服强度可以用来做仿真分析后的结果对比,钢块的结果分析应在强度允许的范围之内。在有限元求解中,对其进行两端约束,将之前算好的重力负载添加到模型上,得到模型的总等效应力分布图和总位移变形图,如图9和图10所示。

图9 总等效应力分布图Fig.9 Distribution of total equivalent stress

图10 总位移变形图Fig.10 Total displacement and deformation
由图9可知,方钢的最大等效应力发生在F1处,它的最大等效应力为10 MPa,远远没有超过结构钢的屈服强度235 MPa,未超过材料的屈服强度值,所以说明设计的喷砂小车底盘符合设计强度要求。其中钢块的最大变形量发生在矩形方钢的中间处,最大变形量在0.005 6 mm左右,小于0.010 0 mm形变量,变形量几乎可以忽略不计。由图10可知,最大变形量在最大位移姿态时的形变量很小,对整个喷砂机器人的运动精度影响可以忽略不计,所以设计的喷砂机器人的车底盘刚度符合要求。
4 喷砂管的运动分析
利用SolidWorks进行运动分析,分别得到的喷砂管角度、角速度和角加速度变化,喷砂管的运动参数如图11所示。角度范围满足设计的15°~75°,角速度范围控制在15~20°·s-1,喷砂管在15°~75°转动过程中,理想平均角速度为20°·s-1。本方案的角速度变化更加合理,能够有利于构件的喷砂作业,同时效率不是太低,当然根据喷砂件的尺寸大小和精度的要求,可以适当调节喷砂管的转动速度要求。同时理想状态下的喷砂角加速度较小[13],无突变。由于转动惯性、摩擦等影响,不可能实现理想状态,所以应该尽可能要求角加速度的数值要求范围小和数值变化平稳减小,曲线变化平稳[14]。

图11 喷砂管的运动参数Fig.11 Kinematic parameters of the sandblast tube
5 结论
目前国内的喷砂机器人研究较为缓慢,有关喷砂机器人的论文相对于其他行业来说并不多,仅仅处于起步阶段,主要针对的还是小型工件的喷砂除锈作业。随着国家推进科学技术的发展,中国制造2020计划的推进,制造业竞争优势,机器人技术的应用取得了飞速的发展,各种交互性的技术应用于其他行业,喷砂机器人也得到了快速发展。文中所研究的龙门式喷砂机器人也将对整个喷砂行业的进步起到推进作用。但由于作者学识不足、条件限制等问题,有关龙门式喷砂机器人的研究存在一些不足之处,目前设计的结构主要是针对工字钢和槽钢结构,对于其他的一些结构如油桶形状的可能无法实现,无法针对各种类型的工件,适应性不强,仍然需要改善。
