无人机空中发射与回收技术分析
2021-11-08崔巍张悦郑鹏李思梁杨丽英何玉庆
崔巍,张悦,郑鹏,李思梁,杨丽英,何玉庆
1.沈阳工业大学
2.中国科学院沈阳自动化研究所
3.机器人学国家重点实验室
随着无人机应用领域不断扩大,无人机空中发射与回收技术成为热点,本文列举国内外典型无人机空中发射与回收技术,阐述其特点及优缺点,对当前空基发射与回收关键技术进行分析,并展望未来发展趋势,促进无人机领域进一步发展。
随着无人机技术的发展,无人机在电力巡检、灾难救援、反恐防暴等领域应用愈加广泛。在实际应用中,为解决跨地域、长航时、大范围搜索以及作战生存力等诸多问题,可以利用大型载机为平台,搭载若干子机,发挥互补优势,在一定程度上能解决后勤补给和续航能力不足等问题,且不易受地形约束,扩大作战半径。无人机的空中发射和回收作为应用的重要环节,对其机动性、重复使用性、整体轻量化等指标有直接要求。因此国内外学者通过将母机平台与释放回收技术相结合,研究出一系列典型空中发射回收技术。
无人机空中发射技术
绳钩释放
早在20世纪初,美国海军就利用飞艇通过人工挂钩方式,实现空中释放“雀鹰”无人机。被回收的子机“雀鹰”由当时典型侦察机改装而成,如图1所示。通过在“雀鹰”机翼上方靠近重心的位置,安装一套带钩的悬挂架,与母艇腹部的绳钩铁环相连,母艇释放无人机之前,钩环处于锁死状态,“雀鹰”通过悬挂架后方的斜杆保持机体稳定。释放时,先由悬挂架将“雀鹰”置于母艇之外的风场滑流区,随后启动母艇发动机,待“雀鹰”上的挂钩从悬挂架末端横杠滑出,母艇内飞行员稍加油门,“雀鹰”即被释放转入飞行模式。但“雀鹰”的释放操作繁琐,大部分依赖于人工。
载机投放
载机投放是将子机搭载于其他飞行器机腹或机翼下方,运载平台先以正常速度飞行,投放时,打开机舱或松开锁挂装置,空中投放无人机。
美国动力(Dynetics)公司“小精灵”项目第二阶段试验采用了固定翼载机投放方式。此项目以C-130运输机为载机,“小精灵”无人机被挂载于其机翼下方,得到投放指令后,C-130松开机翼下方锁挂装置,“小精灵”依靠自身重力与母机分离,整个过程类似空中投弹。美国“捕食者”和“暴风雨”均采用此方式完成“西卡德”无人机投放。
另一种载机投放方式用于多旋翼无人机,最近由美国西点军校ADDAS项目研制。此装置由直升机作为载机,阻力伞、泡沫分配箱和F450四旋翼无人机被作为整体投放。如图2是四旋翼无人机空投装置示意图,图3是四旋翼分配器示意图:被投放的四旋翼无人机左右转子之间用两根铝杆平行连接,竖直置于自动泡沫分配箱中,分配箱中的机电闩门将其锁定,并分配至轨道上固定,整个箱体上方悬挂阻力伞。投放前由直升机将箱体连同阻力伞带往指定高度,收到投放信号后,阻力伞打开,箱门自动开启,闩门解锁,四旋翼无人机靠重力从滑道中滑出。

图2 四旋翼空投装置示意图。
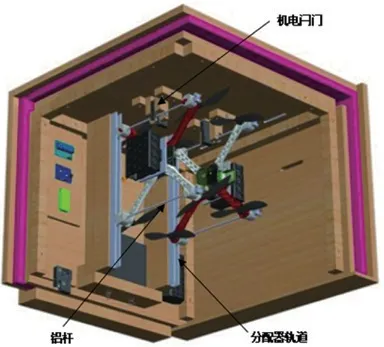
图3 四旋翼无人机分配器示意图。
载机投放原理简单、维护方便,执行速度快,因此可降低从发射到目标区域被拦截的可能。但受风阻及外界环境叠加因素影响,投放时可操纵距离短,对子机控制要求高。
发射管发射
发射管发射主要是以现有战斗机上的机载干扰弹弹筒作为空中发射平台,小型无人机折叠后置于干扰弹发射筒中,而后将其弹出的一种发射方式。
美国国防部战略能力办公室(SCO)推动发展的“灰山鹑”项目采用了典型固定翼无人机管式发射方式,如图4所示。“灰山鹑”无人机采用3D打印制造技术,机翼均采用碳纤维复合材料,形状为风洞试验确定的最佳气动布局;选用低阻力凯芙拉纤维作为机身材质。发射前被折叠置于防损坏保护壳内,壳后侧装有阻力伞或减阻飘带,以确保无人机下降时机头朝下,金属保护壳连同无人机被装载于F-16曳光弹投放器上。发射时,金属壳体被发射管弹出,降落伞或减阻飘带展开,随后与“灰山鹑”无人机分离,最后“灰山鹑”靠尾部螺旋桨及特制机翼稳定飞行。美国海军研究局(ONR)开展的“蝗虫”项目和雷神公司发射的“郊狼”均采用管式发射方式。

图4 “灰山鹑”无人机”在空中被发射。
另一种是多旋翼无人机管式发射项目,由美国国防预研局(DARPA)资助。该项目子机“鱿鱼”(SQUID)为可折叠式六旋翼无人机,机臂采用中空碳纤维复合材料管,碳管通过被动弹簧负载铰链连接到中心体上,允许旋转90°,为提高被动弹道稳定性,将锂聚合物电池置于机头,从而使气动中心低于重心。此系统能以中小型直升机为搭载平台。图5是“鱿鱼”弹射发射过程,图6是“鱿鱼”结构示意图。发射前,重量为3.3kg的“鱿鱼”被折叠置于弹道发射管内,“鱿鱼”和发射管底座之间,通过一个重量为300g的运载组件将压缩气体产生的发射载荷直接传输到机架的支撑柱上。其中,发射系统的动力由液体一氧化碳提供,同时运载器底部设有聚乙烯泡沫盘形成的低摩擦密封,以保证最大限度将压缩气体的能量转化为动能。

图5 “鱿鱼”弹射发射过程。

图6 “鱿鱼”结构示意图。
此种发射方式可一次性连续发射多架小型无人机,响应速度快、隐蔽性高,具备高度安全性;但子机的设计较为繁琐,另一方面由于子机尺寸和质量较小,易受风向突变等外界因素影响。
无人机空中回收技术
伞降回收
伞降回收是伞降技术与直升机平台的有机结合,具有无损、精确等特点。其发展大致分为三个阶段。
第一阶段是采用不具备滑翔能力的圆形伞降系统作为减阻装置,曾应用于美国 CH-3“海王”直升机;
第二阶段取而代之的是高滑翔比冲压翼伞;
第三阶段是在原有基础上应用智能挂钩系统。
现阶段空中伞降回收过程如图7所示。母机平台配有空中回收装置,子机装有主降伞、阻力伞、钩挂伞、吊索和可旋转脱落机构。其回收过程是,地面站发出指令,阻力伞首先开启,发动机随之停车,当子机下降到一定高度和速度时,回收系统发出控制信号,打开主降伞和钩挂伞。主降伞首先处于充气饱和状态,然后完全放气,此时主降伞低于钩挂伞,钩挂伞下的钩爪感知到组合绳,完成钩挂后自动闭合,随后由母机悬挂带走。英国“不死鸟”、加拿大CL-89无人机均采用伞降回收。

图7 空中伞降回收示意图。
伞降回收适用于各种地形,对操作人员要求不高。但仅限直升机作为母机,当回收中小型无人机时,直升机机身周围扰流区会对回收过程产生不利影响;再者伞降系统占用一定空间和载荷重量,成本较高,回收率较低。
阻拦网回收
传统网式回收始于20世纪70年代末,阻拦网架于地面,被回收无人机通过视觉引导系统撞向回收网,撞击产生的能量一部分由弹性网缓冲,另一部分由网两侧的吸收器吸收。
地面回收技术相对成熟,网式回收逐渐向空中回收转移。最近有单位提出一种微型无人机网式回收装置,该装置以无人载机为捕获平台,根据接受信号向空中发射捕捉网,可以捕获3m以外的微型无人机,如图8所示,其组成包括捕获部分、射击部分、闭锁部分和触发部分。为了保证折叠后的网能够移动到所需位置并展开,捕获部分设计成边长为1000mm的正方形尼龙网,四颗弹丸分别位于方形网的四个角;射击部分为斜弹道中的压缩弹簧;闭锁部分由曲柄滑块或凸轮机构组成,用于弹簧能量储蓄;触发部分为一个坚固楔形销,用作弹簧沿弹道的轴向固定。其工作过程可分为三个阶段即压缩、释放和重置。闭锁机构同时压缩四个斜弹道中的弹簧;然后触发机构立即快速释放弹簧,接着子弹由弹簧推动,很快从弹道中弹射出去,同时网被展开并捕获运动目标;之后弹簧向后移动,重新锁定。

图8 阻拦网回收小型四旋翼无人机示意图。
目前网式回收技术主要依靠精确的末端引导技术,现阶段国内外主要有雷达引导、电视跟踪引导、GPS组合引导和激光引导等先进引导技术。空中网式回收的优点是不受地形和空间约束,但由于回收网面积有限,遇到恶劣风沙天气易引起捕获偏离。
机械臂回收
机械臂回收是利用母机平台上搭载的机械臂回收装置,将无人机拖入机舱内的一种回收方式,图9是某型固定翼无人机机械臂回收装置。回收时控制器发出信号,母机机身下的升降台升起,将作动杆拉起,从而使机械臂旋转,与子机机身上的铰接装置进行对接。待光学测量设备检测无误后,控制器发出指令,升降台下降,机械臂携带子机进入机舱,舱门闭合,回收结束。由美国国防高级研究计划局发起的“小精灵”项目第三阶段试验,曾采用此种回收方案。

图9 某型无人机空基机械臂回收装置结构图。
机械臂回收较其他回收方式操作原理简单,不易受气流变化影响;但其末端抓取效率低,且用于回收的机械臂占用部分载重,更适合采用大型母机平台。
锥管捕获式回收
锥管捕获式回收方式源于空中加油对接,即升压级翼形助推器与母机在空中实现动态耦合对接,从而将其拖拽至目的地。回收系统由浮标引导装置和“锥形探针”组成。回收时,在翼形助推器和母机保持协同飞行的前提下,由空气动力控制面保持尾翼稳定,浮标引导装置用于引导无人机机头的翼形助推器,GPS对此过程定位,与大型捕获机携带的锥套浮标引导装置对准配合,实现空中捕捉并锁死,随后由大型捕获机牵引至回收区域降落。图10是椎管捕获对接示意图,图11是某种锥套浮标引导装置结构示意图。

图10 锥管捕获对接示意图。

图11 某种浮标引导装置结构示意图。
美国国防预研局“小精灵”项目采用了锥管捕获式回收,“抵消战略”、“空中集群发射与回收”、“分布式协同作战”是“小精灵”项目的关键任务,如今已完成第三阶段测试,其锥管捕获式回收主要分为三个阶段。
第一阶段:利用锥管捕获系统在母机外强烈紊流区实施软式捕捉;
第二阶段:将“小精灵”无人机发动机关闭,以保护母机为前提,利用六自由度机器人在紊流区对其硬抓取;
第三阶段:将“小精灵”无人机带到货舱内储存架上。
据美国官方媒体报道,在“小精灵”项目第三阶段测试中,由于锥管捕获系统与“小精灵”无人机仅相差“几英寸”距离,未能成功对接,美方预计最早于2023年开展第四阶段测试,即“功能分解式作战”。
锥管捕获式回收中,牵引机与待回收无人机稳定飞行时,相互作用可忽略不计。但其缆绳末端对接处气动作用形式复杂,稳定性差、难以控制,效率较低。
空中发射与回收关键技术
空中精准对接与安全分离技术
空中精准对接技术主要包括无人机高可靠性飞行控制技术、高精准导航和定位技术、视觉引导技术和子母机信息交互技术等。无人机末端引导精度的高低关系着发射回收系统的复杂程度、规模大小及使用的便利性。与此同时,在对接过程中,激烈变化的外界环境严重影响精准对接和回收安全性。“小精灵”项目第三阶段的失败即是精准对接技术未达到要求的典型体现。现有末端引导技术包括雷达引导、光电引导、视觉跟踪引导和GPS组合引导等技术。光电引导又包括激光引导、红外引导、电视引导和紫外引导等。现阶段单一传感器精度难以满足精准对接需求,多传感器与信息融合技术成为发展趋势。
分离时,机体任务载荷和重心分配不均将产生不稳定影响,另外分离时机身周围为非定常流,扰流强烈,对回收时的运动和操控产生较大影响。对于高空高速无人机分离,亦伴有热、光、辐射等问题。针对类似问题,目前常用CFD数值仿真分析方法,模拟分离气动力矩来评估其稳定性。
智能集群技术
无人机集群作战模式已成趋势,相较单架大型无人机,其最大优势在于,能以较小成本获得同等价值功能,实现多方位、多元化信息获取。
一方面,由于集群无人机之间的交互和复杂性,在发射或回收过程中,无人机集群需协同通信、组网、避障、感知、路径规划等,因此应发展可靠的集群协同通信技术,高机动性、高鲁棒性分布式协同算法;采用集群控制器,使集群完成规模化、有序化飞行;再者要求子机在遇到突发状况时,可完成故障诊断、自我修复和环境自适应,利用模块化设计技术,最终实现高度集成化。
变体无人机技术
变体无人机通过改变结构、材料、气动布局、控制等,从而改变全机构型,以适应不同任务需求。将变体无人机技术应用于无人机的发射回收,有利于空中存储、发射、回收和适应各种突发环境和场景。
与普通无人机相比,变体无人机技术更加复杂,任务载荷要求更加严格;折叠翼无人机的折叠方式、制造工艺、材料选取等都要符合使用要求。对大型固定翼载机,主要通过改变机身相关技术参数,机翼后掠角、展弦比等增加升阻比,或通过机翼和尾翼的组合变形,以适应各种复杂环境。中、小型旋翼机、仿生扑翼机等能实现高效精密任务。
我国相关研究处于起步阶段,主要从几大关键技术入手气动结构一体化技术、抗风阻过载技术、先进材料制造技术、远程数据传输和控制技术。
缓冲吸能技术
无人机空中网式回收依赖于缓冲吸能技术,网式捕捉一方面要保障子机机体和其他部件不受损坏;另一方面要求回收网在满足快速捕捉的前提下不破损,防止造成无人机二次损坏。
典型的缓冲吸能装置如涡轮阻尼装置,其工作原理可以将动能转化为液体内能贮存起来,达到缓冲效果。现阶段有单位已成功采用两组涡轮阻尼缓冲系统,实现地面回收固定翼无人机,动能吸收率高达95%。
除此之外,使用聚乙烯发泡材料、聚氨酯材料、蜂窝复合材料等优质缓冲吸能材料,探索先进缓冲吸能方式。
低成本制造技术
现有运输机或侦察机在空中发射或回收智能无人机,实现半自主到完全脱离人工的过渡,节约成本且更加易于维护。采用材料改进、系统替换、目标优化等措施,满足任务需求的同时,提升平台整体性能。如CICADA无人机使用3D打印技术制造关键或损坏的零部件,大大降低成本,并获得轻量化空基一体化发射回收平台。
技术展望
无人机空中分布式作战已成趋势,而空基发射回收技术仍不够成熟,应借鉴国内外现有经验及科研成果,重点发展以下关键技术。
重点发展末端引导技术
现阶段单一末端引导技术已不能满足使用需求,应融合光电、雷达、卫星等技术,以适应新的发展策略。与此同时,无人机结构设计、载体动态特征等都与末端引导技术息息相关,因此从不同角度发展末端引导技术,有利于提高无人机空中对接和捕获效率。
集群高机动性空基发射回收机构开发
集群作战规模和抵消战略不容小觑,空基集群发射和回收技术是集群作战的基础。因此有必要开展一体化空中发射回收相关研究,一方面为集群无人机之间提供信息交互、自我修复和后勤支配;另一方面提供高机动性发射回收平台,提高发射回收效率,使作战模式多元化;并行发展集群与反集群技术研究,早日实现快速、高机动性智能集群作战体系。
追求轻量化、高效载机平台
现阶段受无人机动力系统技术限制,续航能力明显不足。寻求新能源的同时,应从飞机结构材料出发,在保障承载能力的前提下,机身及部件可采用先进复合材料和高强度工程塑料,实现轻量化平台。另一方面采用高效、优化方法,对无人机外形和尺寸加以优化,合理设计气动布局、搭载平台和各分系统的兼容性,发挥其最大效能。■
