空管自动化系统引接ADS-B信号后目标异常问题分析
2021-11-07胡今晶
胡今晶

摘要:伴随空管自动化行业的高速发展,S模式雷达、ADS-B等多种监视新技术广泛应用,自动化系统已实现多监视源的融合,进而实现对单一目标位置的精确计算。因此,对多雷达融合机制的深入研究,有助于自动化系统运行维护人员快速分析日常运行问题。本文结合运行实际,阐述了对ADS-B原始数据中位置信息的解析以及西安区域管制中心所辖主备用自动化系统多雷达融合处理中航向数据的融合机制,希望对航迹融合问题的深入排查分析提供有力帮助。
关键词:空管自动化系统;多雷达融合;航向融合;异常现象;监视数据;目标航向。
1 ADS-B系统原理
广播式自动相关监视(ADS-B)是国际民航组织确定的未来主要监视技术。ADS-B 基于卫星定位和地/空数据链通信,提供了更加安全、高效的空中交通监视手段,能有效提高管制员和飞行员的运行态势感知能力,扩大监视覆盖范围,提高空中交通安全水平、空域容量与运行效率。
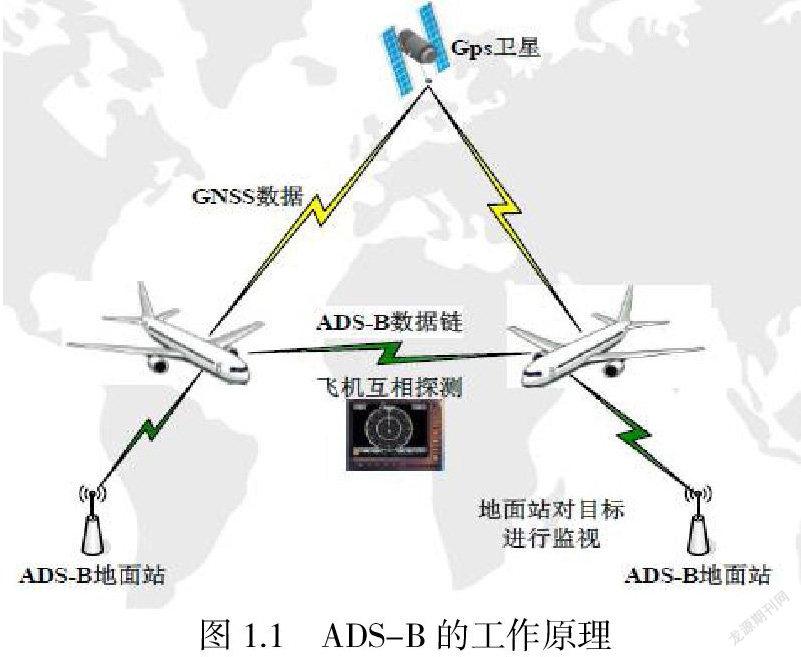
ADS-B的工作原理是通过机载系统导出飞机定位的四维位置信息(包括经度、纬度、高度和时间)以及其他的必要飞行参数,地面基站通过对接收的报文信息进行解析,并将位置和高度信息实时在监视器上显示,从而实现对飞机动态的实时监视。它是集现代最先进的数据通信、卫星导航和监视技术千一体的新一代航行系统的先进技术,主要用于空中交通管理对航空器飞行动态的跟踪监视,其工作原理如图所示1.1所示。
ADS-B系统是一种双向数据链的广播监视系统,不仅用于空对地的下行通信链路,下传飞机位置报告,而且也能实现飞行员同管制员之间直接双向数据通信和上传飞行报文信息。装备 ADS-B设备的飞机,依靠机载导航设备全球导航卫星系统和其他机载信息源(如惯性导航系统等)获取自身位置、速度等信息以及其他飞行所需信息,并通过数据链周期性地向周边自动广播出去,供外界对其进行监视。同时,该系统也能接收邻近目标飞机的广播信息,使得飞行员能更好地了解空中附近其他飞机的飞行动态,并自主地保持合适的安全间隔,能有效地保障飞机的飞行安全和防止目标飞机的非法入侵。
2 主备用自动化系统多雷达融合航向信息融合机制
空管自动化系统是以计算机为核心,实现对雷达、飞行计划、气象等信息的自动化处理系统。通过人机交互界面为管制员提供对整个管制区内飞行活动的监视、预测和告警信息,从而大大提高了空域的使用效率,增强了空中飞行的安全度,减轻了管制员的工作负荷。空管自动化系统的核心是多雷达航迹融合与飞行计划处理。
西安区管主用INDRA自动化系统监视数据处理模块设有MAIN组和FALLBACK组。其中每组配置两台RDCU服务器,用于进行监视数据前端处理,每台RDCU负责处理一路监视原始数据;配置两台SDP,热备份互为冗余。MAIN组采用卡尔曼滤波,FALLBACK组采用α-β滤波方法。
备用民航二所自动化系统监视数据处理模块设有两台SDFP服务器,进行监视数据前端处理,两台MSDP服务器,进行监视数据融合处理,一台BSDP服务器,进行监视数据旁路处理。民航二所自动化系统对各监视源接入的数据进行关联处理,确定同一个航迹的所有数据源,并为它们分配相同的系统航迹号。相关条件为:相同应答机编码、且距离、航向差、高度差、速度差均小于配置文件中的相关值。
民航二所自动化系统中,当一个目标可以被多部监视源探测到,该目标的位置由探测到它的多个监视数据共同确定。配置每部监视源在各个区域的静态权重;另外,对单监视源目标进行滤波产生的协方差以及单雷达测试目标偏移量、通道延时可形成动态权重。结合静态权重和动态权重,采用加权融合的方式来确定目标的准确位置。
西安区管主备用自动化系统航向融合模式为动态加权平均算法,即多部探测到该目标的雷达数据按照权重进行累加,最终得到融合航迹的航向数据。其中动态加权权重由雷达实时质量监控结果,对单雷达目标的跟踪处理效果,以及单雷达信息与多雷达融合信息的比较结果所决定。
实时质量监控由监视数据前端处理模块实现,主要包括通道状态检查、帧校验、服务信息连续性检验、数据必备项检查、测试目标验证、数据项有效性验证、航迹连续性检验。其中,对动态权重有贡献的主要为通道状态检查和测试目标验证。
自动化系统融合航迹的位置、航向等信息的刷新周期为4秒,当系统收到对于同一目标、相同雷达源的数据时,航向融合参考的数据源均为最新一个到达自动化系统的雷达数据包。
3 异常现象研究及分析
3.1 异常现象统计
2020年INDRA自動化系统接入ADS-B二级数据中心融合信号后,自动化系统SDD界面中,本场起飞航班偶有目标位置跳变等异常现象。截止2021年3月4日,问题统计如表1所示。
技术人员分别回放INDRA自动化系统和民航二所自动化系统录像发现,目标位置跳变期间,可被本场雷神二次、INDRA二次、移动雷达和ADS-B信号多重覆盖。目标跳变期间,二次雷达融合目标正常显示在南跑道,ADS-B信号跳变至北跑道,进而造成北跑道落地航班出现错相关等异常情况。
3.2 监视数据排查分析
西安区管INDRA自动化系统引接的双路ADS-B信号在负四米机房网络传输设备落地后,接入二层交换机,经二层交换机分路后分别传输至INDRA自动化系统四台RDCU监视数据前端处理服务器。
参照ASTERIX数据协议标准,对发生航向漂移期间的雷神二次、INDRA二次和移动雷达的ASTERIX原始数据进行逐一分析,分析结果如下:
ADS-B二级数据中心数据分析:
通过对ADS-B二级数据中心录像进行回放,回放发现问题航班在ADS-B二级数据中心的融合ADS-B目标位置自起飞后持续正常,沿南跑道正常飞行。随后对ADS-B二级数据中心原始数据包进行详细解析。
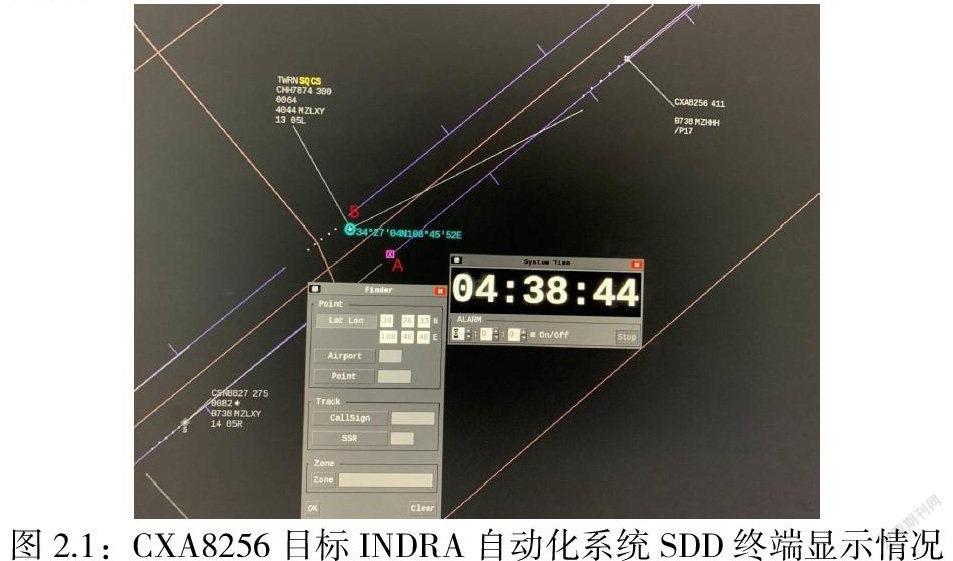
经过对ADS-B二级数据中心原始数据的分析及与INDRA自动化系统录像对比,发现ADS-B二级数据中心输出的ADS-B融合航迹在12:38:44时目标位置位于南跑道(如图2中的位置A),而INDRA自动化系统SDD终端上该目标显示在北跑道范围内(如图2.1中的位置B),初步分析ADS-B二级数据中心输出的ADS-B融合航迹与INDRA自动化系统处理后的ADS-B融合航迹位置不一致[1]。
INDRA自动化系统数据分析:
为进一步确认目标位置跳变产生问题的故障节点,技术人员进行了INDRA自动化系统RDCU服务器录像回放分析。经过回放发现RDCU录像中位置跳变航班的ADS-B信号自南跑道起飞后,持续沿南跑道直线飞行进入一边,未发生位置跳变现象,分析确认INDRA自动化系统引接的ADS-B融合信号正常,INDRA自动化系统RDCU服务器对ADS-B信号的前端预处理正常,初步判定目标位置跳变原因为INDRA自动化系统SDP服务器多雷达融合处理异常导致[1]。
民航二所自动化系统接收ADS-B原始数据包分析:
为进一步确认自动化系统引接的ADS-B数据状态,技术人员选取2月23日个别ADS-B原始数据包进行解析,同时与民航二所自动化系统多雷达融合处理和显示结果进行对比,分析结果如下:
1)本场离港航班第一个数据包
通过对比确认,ADS-B原始数据包中航班号、24位地址码、二次代码、目标飞行高度、速度、航向、位置信息与自动化系统SDD终端显示均一致。
2)离港航班飞行高度3000米时的数据包
通过对比确认,ADS-B原始数据包中航班号、24位地址码、二次代码、目标飞行高度、速度、航向、位置信息与自动化系统SDD终端显示均一致。
3)飞越航班飞行高度9000米时的数据包
通过对比确认,ADS-B原始数据包中航班号、24位地址码、二次代码、目标飞行高度、速度、航向、位置信息与自动化系统SDD终端显示均一致。
4)本场进港航班最后一个数据包
通过对比确认,ADS-B原始数据包中航班号、24位地址码、二次代码、目标飞行高度、速度、航向、位置信息与自动化系统SDD终端显示均一致[1]。
3.3 目标航向漂移原因分析及改进建议
3.3.1 原因分析
通過对各高度层、多种飞行姿态航班的ADS-B原始数据进行分析,发现ADS-B二级数据中心输出至自动化系统的ADS-B原始数据中航班号、24位地址码、二次代码数据等目标识别信息与自动化系统处理结果一致,高度、速度、航向、NUC精度值等动态数据与自动化系统处理结果一致。
综上,判定INDRA自动化系统ADS-B目标位置跳变是由于INDRA自动化系统中个别目标的多雷达航迹融合结果异常导致。
3.3.2 改进建议
1)厂家已提供新版本软件,新版本软件中已修复ADS-B信号引起的本场跑道范围内目标异常问题,新版软件发布后可解决该问题;
2)已于3月5日晚在ADS-B二级数据中心设置ADS-B信号屏蔽区缓解该问题,至今再未发生ADS-B目标漂移的问题;
3)加强对INDRA自动化系统ADS-B信号的状态监控和巡视,发现异常情况及时进行处置。
4 结束语
通过对自动化系统监视数据前端处理、融合处理以及对雷达原始数据的深入分析,可实现对空管日常运行中出现的目标异常问题(目标丢失、目标分裂、假目标、航向跳变、高度跳变等)的快速定位,丰富问题排查方法。同时,可通过对问题的精确定位,促进各运行单位有效管控运行隐患,避免对管制运行安全造成影响。
未来,伴随ADS-B、S模式雷达的广泛应用,技术人员可通过对监视原始数据的解析,全面掌握监视数据源和机载设备间的双向交互信息,进而为管制用户提供更加高效可靠的监视数据保障手段。
参考文献:
[1]西安区域管制中心AirNet空管自动化备份系统技术手册