某箱式发射装置机器人装填技术研究
2021-11-04陈国虎刘志仙
陈国虎,刘志仙,李 能
(国营第四四五厂,浙江 杭州 310024)
0 引言
自推动武器具有无后座力、使用灵活、火力迅猛、性价比较高的优点,广泛用于反潜、反雷[1]、反蛙人、攻击滩涂阵地、防空干扰等作战任务。我国现役舰载火箭发射装置大量采用箱式设计,对实现发射装置的隐身性、提高发射装置排布密度具有较大的优势。由于受到结构布局、技术手段的限制,部分箱式发射装置采用人工装填的方式,由扬弹系将武器从弹仓输送至甲板,再由人工装入发射管中。完成一轮发射后无法快速进行下一轮的发射工作,严重影响了武器效能的发挥,安全性也无法保障。基于上述原因,急需研制一套针对箱式发射装置的自动装填系统,采用主从随动遥操作控制,由装填机器人将武器装入发射装置中,实现自动装填,取代人工装填彻底消除人员在舰面操作的安全隐患,提高装填效率。
1 研究方案
通过对中大口径的火炮弹药进行自动装填研究[2],针对箱式火箭发射装置,由于其结构的特殊性,更适用于采用机器人机械臂的结构形式。
发射装置装填机器人工作原理是采用主从随动遥操作方式,操作者在甲板下远程遥操作甲板上的装填机械手进行弹体自动装填。
完成1次装填调试后,主从随动遥操作控制器记忆装填机械臂运动参数,对后续装填过程实现全自动装填。装填机器人装填过程如图1所示。
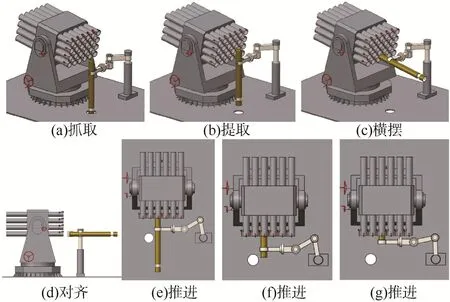
图1 装填机器人工作过程示意图Fig.1 Working process diagram of loading robot
非装填时,装填机器人折叠缩放至甲板以下,不对发射装置运动过程产生影响。装填机器人内部装有触觉开关以检测其抓弹信号,这是机器人工作安全的保证。
装填机器人上配有视觉摄像头[3],监控机器人工作状态,一旦工作出现异常可人工干预。
发射装置装填机器人系统主要的特点有:1)采用主从随动示教方式控制,操作简便易掌握;2)弹体在竖直面内可自由转动以便调整其姿态;3)采用安全皮肤技术,如果因操作不当导致机械手碰及物体时将自动停止,保证机器人工作的安全;4)抓弹手指采用电机驱动,并采用安全压力控制,避免抓弹时压力过大而损坏弹体[4]。
出于对装填机器人的刚度和强度的考虑,改进其结构如图2所示。
其装填示意图如图3所示:装填机械手首先进入姿态(a),装填导轨与扬弹通道对齐,提弹机构处于最后端位置,将载荷夹紧;在姿态(b)时,由提弹机构将载荷往上提取;装填机械手通过姿态(c)和(d)调整,将装填轨道与装置的发射管对齐;最后在姿态(e),将载荷推入发射管内部,实现装填功能。
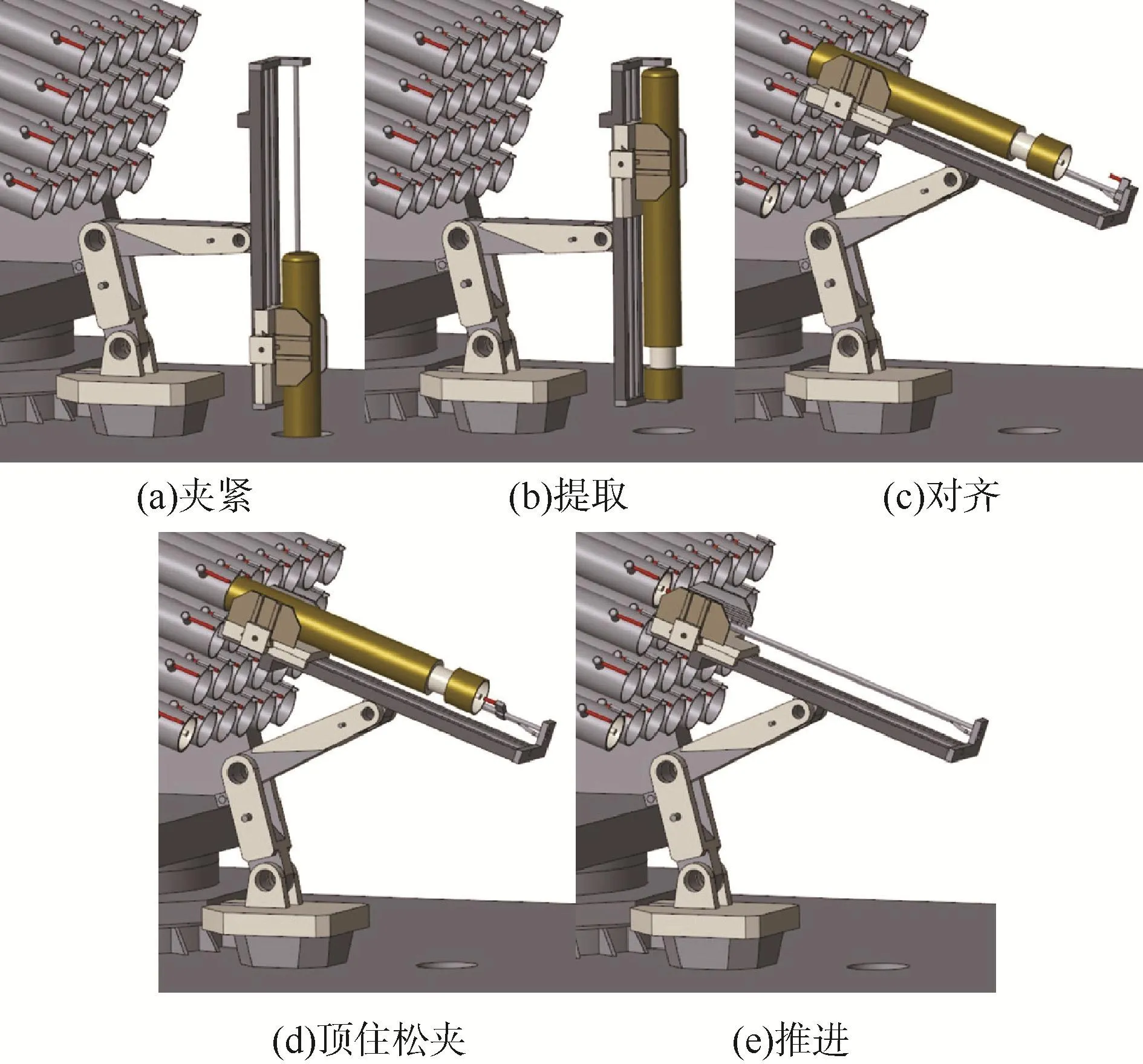
图3 机械臂装填过程Fig.3 Loading process of manipulator
2 仿真分析
为确定装填机械臂的结构合理性,采用ANSYS和ADMAS软件进行仿真研究[5-6]。ANSYS Workbench[7]软件是美国 ANSYS公司研制的大型通用有限元分析软件,是世界范围内增长最快的计算机辅助工程软件,能与多数计算机辅助设计软件接口,实现数据的共享和交换,如 Creo、UG、CATIA、Solidworks、AutoCAD等。该软件是融结构、流体、电场、磁场、声场分析于一体的大型通用有限元分析软件。在核工业、铁道、石油化工、航空航天、机械制造、能源、汽车交通、国防军工、电子、土木工程、造船、生物医学、轻工、地矿、水利、日用家电等领域有着广泛的应用。ANSYS功能强大,操作简单方便,现在已成为国际最流行的有限元分析软件。ANSYS Workbench主要包括 3个部分:前处理模块、分析计算模块、后处理模块。前处理模块提供了一个强大的实体建模及网格划分工具,用户可以方便地构造有限元模型。分析计算模块包括结构分析、流体动力学分析、电磁场分析、声场分析、压电分析以及多物理场的耦合分析,可模拟多种物理介质的相互作用,具有灵敏度分析及优化分析能力。后处理模块可将计算结果以彩色等值线显示、梯度显示、矢量显示、粒子流迹显示、立体切片显示、透明及半透明显示等图形方式显示出来,也可将计算结果以图表、曲线形式显示或输出。
ADAMS/View提供了一个直接面向用户的基本操作对话环境和虚拟样机分析的前处理功能,其中包括样机的建模和各种建模工具、样机模型数据的输入与编辑、与求解器和后处理等程序的自动连接、虚拟样机分析参数的设置、各种数据的输入和输出、同其他应用程序的接口等。ADAMS/View采用了Windows风格的操作界面和各种操作习惯,使得程序操作界面非常友好。
ADAMS/Solver是求解机械系统运动和动力学问题的程序。完成样机分析的准备工作以后,ADAMS/View程序可以自动地调用 ADAMS/Solver模块,求解样机模型的静力学、运动学或动力学问题,完成仿真分析以后再自动地返回ADAMS/View操作界面。
ADAMS仿真分析结果的后处理,可以通过调用后处理模块 ADAMS/PostProcessor来完成。ADAMS/PostProcessor模块具有相当强的后处理功能,它可以回放仿真结果,也可以绘制各种分析曲线。除了可以直接绘制仿真结果曲线以外,ADAMS/PostProcessor还可以对仿真分析曲线进行一些数学和统计计算,可以输入实验数据绘制试验曲线,并同仿真结果进行比较,可以进行分析结果曲线图的各种编辑。
机械臂的仿真分析为静力结构分析和运动学分析,分别在ANSYS Workbench和ADMAS软件下完成[8]。
仿真研究在载重为130 kg时,分析机械臂的应力和变形情况。在各个关节的输入移动速度已知的情况下,求解得到机械臂导轨端的速度。机械臂简化模型导入到ANSYS Workbench中。仿真设定机械臂主要零部件的材料性能如表1所示。
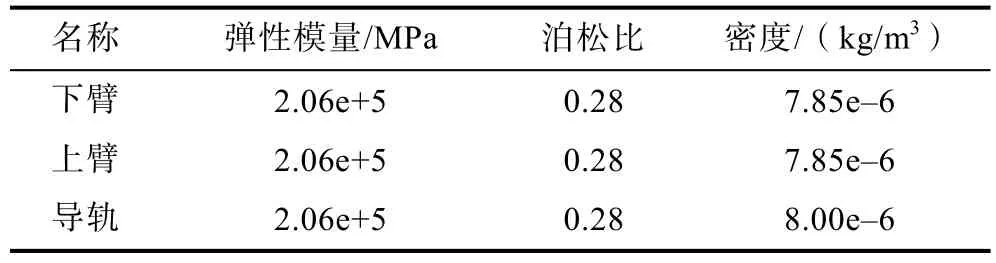
表1 机械臂主要零部件材料性能表Table 1 Material performance of main parts of manipulator
通过仿真,解得到机械臂的应变和变形图如图4-5所示,机械臂的最大应变为8.25e-6 mm,位于上臂与下臂的连接处;机械臂的最大变形为0.023 mm,位于导轨前后端面。该应变和变形处于合理范围内,满足要求。
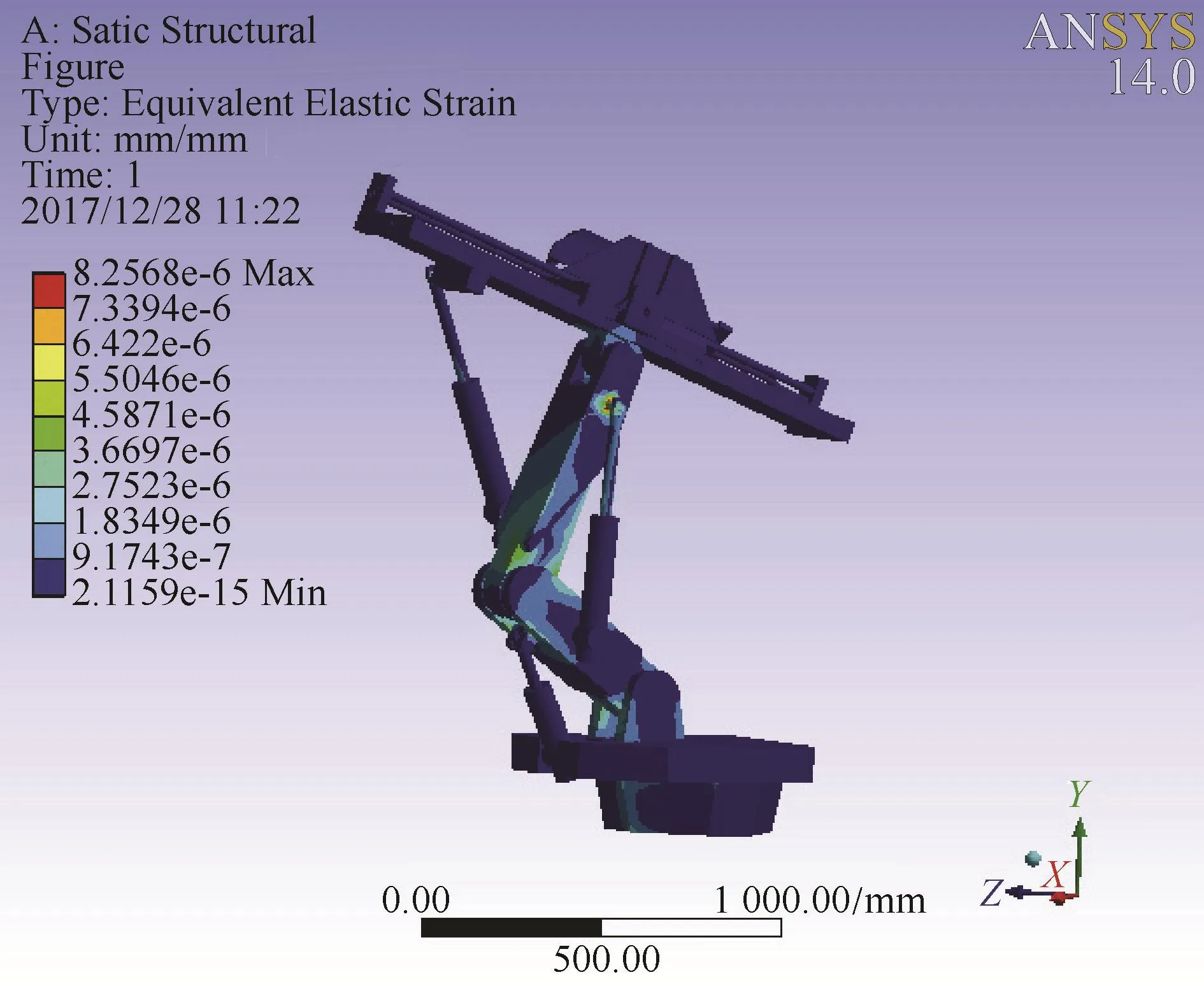
图4 ANSYS仿真应变图Fig.4 ANSYS simulated strain diagram
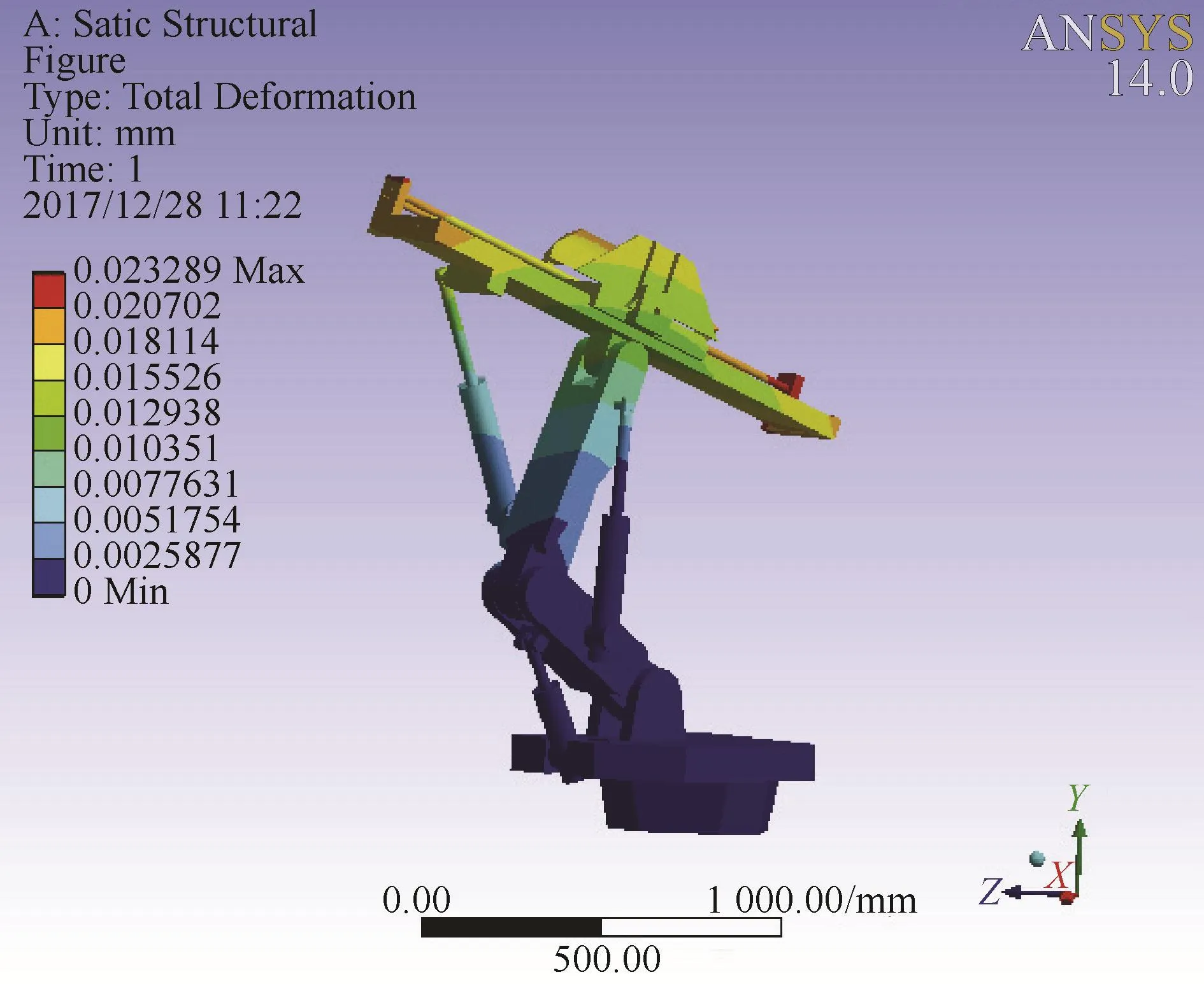
图5 ANSYS仿真变形图Fig.5 ANSYS simulated deformation diagram
对机械臂采用ADMAS仿真分析,设定推杆1的速度为0.02 m/s,方向沿着推杆缩回;设定推杆2速度为0.03 m/s,方向沿着推杆缩回;设定推杆3的速度为0.04 m/s,方向沿着推杆缩回。求解得到导轨左端零件质心X、Y、Z方向的位移曲线和运动速度曲线如图6-7所示。
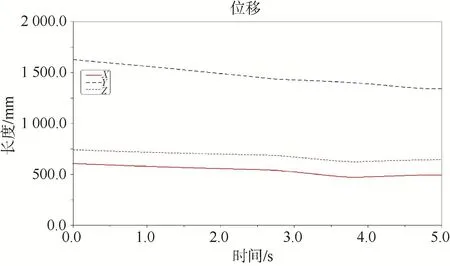
图6 机械臂左端零件质心的位移Fig.6 Displacement of mass center of left end part of manipulator
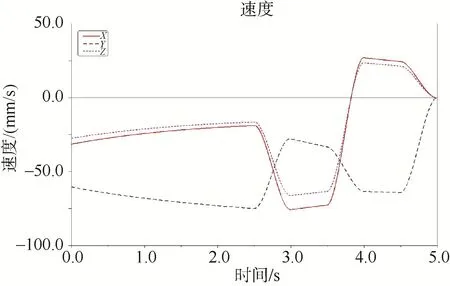
图7 机械臂左端零件质心的运动速度Fig.7 Velocity of mass center of left end part of manipulator
通过 ADMAS求解可以得到机械臂零件的任意位置的位移和运动速度,确定机械臂各部位质心运动情况。通过仿真确定了机械臂左端零件质心的位移和速度满足设计要求。
3 结束语
针对传统箱式发射装置采用箱式结构时装填方式原始、效率底下、安全无法保障的缺点,提出了一种机械臂装填方案,采用 ANSYS、ADMAS进行仿真分析研究,确定了该机械臂装填方案的可行性。机器人自动装填技术的研究对于提升箱式发射装置的作战效能、拓展箱式发射装置应用范围具有较大的意义[9]。
